
openvela 新平台适配指南
一、本文目标
- 了解 openvela 启动(bringup)流程。
- 了解在 openvela 中如何适配新的芯片和板级设计。
二、概述
openvela 是一个支持多种硬件平台的嵌入式操作系统,具有模块化和高扩展性。通过分层架构设计,openvela 简化了从处理器架构、芯片层到板级平台的适配工作。本文档介绍 openvela 的系统架构、移植步骤及相关开发资源。
1、系统架构
openvela 的设计分为三层架构,分别是架构层(Architecture)、芯片层(Chip/SoC)和板级层(Board)。
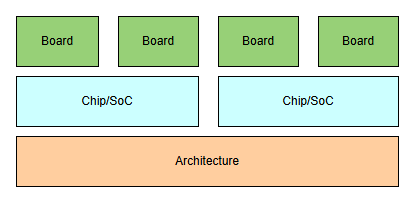
架构层(Architecture)
架构层是系统的核心基础,定义了 CPU 架构,例如 ARMv7-M、ARMv7-A/R 和 RISC-V 等主流处理器架构。openvela 已支持多种 CPU 架构,通常无需进行修改或适配。
芯片层(Chip/SoC)
芯片层(System on Chip,简称 SoC)基于具体的处理器架构进行扩展,包含芯片的特定逻辑设计,例如中断控制、时钟管理、通用 I/O 逻辑和专用外设模块。例如,采用 ARMv7-M 处理器架构的 STM32 是典型的 SoC。
板级层(Board)
板级层在芯片的基础之上,连接外设以形成特定功能的开发板。例如,STM32F4 Discovery 开发板包含 STM32F407 SoC,同时集成了外部传感器和其他辅助电路板。板级层的适配通常包含 PIN 脚定义、板级驱动和硬件初始化逻辑。
在开发过程中,多个相似 SoC 或开发板可以共享公共部分代码,以提升开发效率和维护便捷性。
2、支持平台与移植说明
openvela 已支持多种主流开发板,可参考 Supported Platforms 获取详细信息。
如果需要将 openvela 移植到一个新的开发板上,需完成以下适配工作:
- 确保目标架构(Architecture)已被 openvela 支持。
-
针对新开发板,完成以下层次的适配:
- 芯片层(Chip/SoC):增加目标芯片的支持,代码通常遵循 nuttx/arch 下的某种架构目录(如 armv8-m、risc-v、arm64 等)。
- 板级层(Board):完成与目标开发板相关的配置、链接脚本及驱动适配。
完成适配流程后,可生成以下二进制产物,用于部署到目标硬件:
- libarch.a:架构层静态库。
- libboards.a:代码驱动静态库。
- vela_nuttx.bin:编译生成的最终运行二进制文件。
3、新平台移植流程
移植 openvela 时,需要完成以下操作:
- 熟悉代码结构。 开发者需熟悉 Vendor 代码仓的基本结构,vendor 目录支持通过 Git 仓库管理厂商定制化代码。目录命名通常以厂商名称命名,例如 open-vela/vendor_template 为适配模板。
-
配置 Kconfig 文件。
- Kconfig:用于定义编译选项和模块依赖项。开发者需根据硬件模块和外设配置文件,确保所需功能已在 Kconfig 中启用。Kconfig 使用可参考 Kconfig 使用指南。
-
编写 Makefile。
- Makefile 使用工具链完成代码编译,需确保规则定义正确,并支持目标硬件平台。
-
完成芯片层(Chip/SoC)与板级层(Board)代码适配。 根据 open-vela/vendor_template 中的模板,适配芯片层和板级层代码。需要更新驱动文件、板级配置文件,以及完成硬件初始化逻辑。
- 编译与测试。 编译并生成目标静态库和最终运行文件,测试所有功能是否工作正常。
4、编译方式与产物管理
开发者需关注以下内容:
- 所有定制代码存放在 vendor 目录中,不得修改核心代码,以便与 openvela 的主仓库保持兼容。
- 编译步骤生成的产物包括:
- libarch.a:架构层代码库。
- libboards.a:板级代码库。
- vela_nuttx.bin:最终的二进制镜像,用于固件烧录。
5、示例流程图
以下为 openvela 新平台移植的流程图,直观展示了开发步骤及逻辑顺序:

下面以 vendor 目录下适配为例,所有 vendor 仓库的初始源代码为 open-vela/vendor_template,该模板包含了 操作系统的基本代码结构,因此适配过程只需打开相应文件进行修改。
三、芯片层适配
芯片层适配是 openvela 框架中支持硬件平台的重要环节,主要完成基于操作系统的入口函数,涉及以下方面的实现与配置:
- 启动入口函数:定义操作系统的初始加载逻辑。
- 架构(Arch) API 实现:实现系统调用所需的基础架构接口。
- 中断适配:配置中断处理函数及相关寄存器。
- 串口驱动:实现串口输入输出,并进行串口驱动注册。
- 定时器驱动:支持操作系统调度和时间相关功能。
- 内存(堆区)初始化:配置动态内存分配所需的堆区。
- Kconfig 和 Makefile 编写:管理配置选项和代码构建流程。
芯片层代码位于 vendor/<vendor_name>/chips 目录下,典型的目录结构如下所示:
vendor/vendor_name/
├── chips
│ └── <chip_name>
│ ├── chip.h
│ ├── include
│ │ ├── chip.h
│ │ └── irq.h
│ ├── Kconfig
│ ├── Make.defs
│ ├── <vendor_name>_irq.c
│ ├── <vendor_name>_irq.h
│ ├── <vendor_name>_lowputc.c
│ ├── <vendor_name>_lowputc.h
│ ├── <vendor_name>_start.c
│ ├── <vendor_name>_start.h
│ └── <vendor_name>_timeisr.c
1、启动入口
概述
在 nuttx/arch 目录下,系统为统一异常处理流程,为每个架构(arch)都定义了异常向量表(如 _vectors)。
以 ARMv8-M 为例,当发生复位异常时,系统会调用不同芯片实现的 __start 函数。
__start 函数的具体实现位于 <vendor_name>_start.c 文件中。开发者可以参考典型实现,如 stm32_start.c,以完成芯片平台的适配。
__start 函数的职责
__start 函数是系统复位异常的入口函数,其主要职责包括以下方面:
- 清除 BSS 段:
- BSS(Block Started by Symbol)段用于存储未初始化的全局变量和静态变量。在系统复位后,需将其清零。
- 拷贝 .data 和 RAM 函数到指定位置:
- 将只读存储器(如 Flash)中的 .data 段和 RAM 函数拷贝到运行时 RAM 的指定区域。
- 初始化必要模块:
- 配置系统时钟(clock)。
- 初始化串口(serial)。
- 设置堆栈限制(stack limit)等环境变量。
- 调用操作系统启动入口:
- 通过 nx_start() 函数加载和启动 openvela 核心操作系统。
示例代码:__start 函数
以下是一个标准的 __start 函数实现模板,用于完成系统复位入口的初始化流程:
/****************************************************************************
* Name: __start
*
* Description:
* This is the reset entry point.
*
****************************************************************************/
void __start(void)
{
/* do something initialize */
...
#ifdef CONFIG_ARCH_PERF_EVENTS
up_perf_init((void *)STM32_SYSCLK_FREQUENCY);
#endif
/* Perform early serial initialization */
#ifdef USE_EARLYSERIALINIT
arm_earlyserialinit();
#endif
/* Bring up NuttX */
nx_start();
/* Shouldn't get here */
for (; ; );
}
2、串口
概述
芯片通常包含多路串口,通常选用一路串口作为系统控制台(console),用于输出日志和 nsh 交互。在系统初始化(bringup)过程中,这一路串口的正常工作非常关键,详情请参见串口驱动适配。
代码位置
-
参考实现:
-
串口相关实现一般位于:
- <vendor_name>_lowputc.c
- <vendor_name>_serial.c
初始化流程
-
串口的初始化通常发生在 nx_start 之前。
-
每个架构(arch)都会提供 <arch>_earlyserialinit 接口,用于初始化控制台对应的串口寄存器,后续可通过 <arch>_lowputc 函数完成日志打印。下面是 ARM 平台的示例函数:
./arm/src/common/arm_internal.h /**************************************************************************** - Name: arm_earlyserialinit - - Description: - Performs the low level USART initialization early in debug so that the - serial console will be available during bootup. This must be called - before arm_serialinit. - ****************************************************************************/ #ifdef USE_EARLYSERIALINIT void arm_earlyserialinit(void) { } /**************************************************************************** - Name: arm_lowputc - - Description: - Output one byte on the serial console - ****************************************************************************/ void arm_lowputc(char ch) { }
串口访问
操作系统代码会使用通用架构接口 up_putc 和 up_puts 来直接访问串口,其中 up_putc 需要厂商实现。
/****************************************************************************
* Name: up_putc
*
* Description:
* Provide priority, low-level access to support OS debug writes
*
****************************************************************************/
void up_putc(int ch)
{
}
串口驱动注册
为了使应用可以通过标准输入/输出(stdin/out/err)访问物理串口,必须注册串口驱动。
-
每个架构提供 <arm>_serialinit 接口,又厂商实现。
-
内部调用 uart_register 注册控制台和其他串口设备节点。以下为 ARM 平台示例:
/**************************************************************************** - Name: arm_serialinit - - Description: - Register serial console and serial ports. This assumes - that arm_earlyserialinit was called previously. - ****************************************************************************/ void arm_serialinit(void) { #ifdef CONSOLE_DEV uart_register("/dev/console", &CONSOLE_DEV); #endif ... }
3、定时器
概述
定时器(Timer)与系统的计时和定时相关。在 openvela 中,提供了两种主要的驱动模型:
- arch_alarm:基于单次定时器(oneshot driver)。
- arch_timer:基于常规计时器(timer driver)。
两种驱动的主要区别在于硬件计数器超时后的处理方式,这直接影响定时精度和误差。
驱动模型区别与适用
- arch_alarm 适用于硬件计数器超时后无需清空计数器的情况。该模型避免了重新启动计数器带来的累计误差,优先推荐使用,更多详情请参见 Arch_Alarm 框架开发指南。
- arch_timer 通常适配于如系统滴答定时器(systick)等周期性定时器,硬件计数器在超时后需要清空并重新启动,更多详情请参见 Arch Timer 驱动框架使用指南。
arch_alarm 驱动适配流程
厂商实现时,主要关注如下步骤:
- 实现单次定时器(oneshot)驱动。
- 在 up_timer_initialize 函数中,调用驱动初始化接口创建 oneshot_lowerhalf_s 实例。
- 调用 up_alarm_set_lowerhalf 将驱动与系统 arch_alarm 模型绑定。
以下是 up_timer_initialize 函数的参考实现,位于 arm_arch_timer.c:
/****************************************************************************
* Function: up_timer_initialize
*
* Description:
* This function is called during start-up to initialize the timer
* interrupt.
*
****************************************************************************/
void up_timer_initialize(void)
{
struct oneshot_lowerhalf_s *lower = xxx_oneshot_initialize();
up_alarm_set_lowerhalf(lower);
}
4、异常/中断
每个架构(arch)都提供好了对应的中断异常向量表,使得厂商能够调用 irq_attach 绑定相应的中断处理函数。
为实现中断的初始化、启用、禁用和优先级设置,厂商需要实现一系列与架构相关的以 up_ 开头的函数。
- 详细内容请参见中断系统适配指南。
- 相关代码请参考 stm32_irq.c,中断的实现在<vendor_name>_irq.c中。
5、Stack/Heap
概述
在嵌入式系统中,栈(stack)和堆(heap)的划分至关重要。通常在平面构建(flat build)下的内存布局如下:
.data region Size determined at link time.
.bss region Size determined at link time.
IDLE thread stack Size determined by CONFIG_IDLETHREAD_STACKSIZE.
Heap Extends to the end of SRAM.
说明如下:
- .data 区域:该区域大小在链接时确定。
- .bss 区域:该区域大小在链接时确定。
- IDLE 线程栈:大小由 CONFIG_IDLETHREAD_STACKSIZE 定义。
- 堆(Heap):从静态随机存取存储器(SRAM)的末尾向下延伸。
注意
IDLE 栈通常位于 .bss 段之后,其大小由 CONFIG_IDLETHREAD_STACKSIZE 指定,堆紧随其后。
中断栈配置
- 厂商可通过配置项 CONFIG_ARCH_INTERRUPTSTACK 设置中断栈大小。
- 中断栈空间由全局变量 g_intstackalloc 定义。
- 各架构通过对应的初始化函数(例如 arm_initialize_stack)调用 up_get_intstackbase 获取中断栈底部地址,并根据 CONFIG_ARCH_INTERRUPTSTACK 计算栈顶。
堆管理
- openvela 支持多个独立的堆管理。同一堆可包含多个不连续的物理内存区域。
- 系统、驱动和应用通过 kmm_malloc 或标准 malloc API 申请堆内存。
- 参考代码位置:stm32_allocateheap.c。
堆大小计算
通常情况下,系统的剩余 RAM(去除了 .data、.bss 和 IDLE 栈等部分)将注册为堆。因此,堆的总大小会随系统的变化而变化。可以使用以下方法计算堆的起始地址和大小:
- 起始地址:ebss + CONFIG_IDLETHREAD_STACKSIZE
- 堆大小:RAM 末地址 - 起始地址
6、Kconfig 和 Make.defs
概述
Kconfig 和 Make.defs 是构建和配置 openvela 系统的两个重要文件。它们分别用于定义芯片的配置项和管理编译源文件。
Kconfig 作用
chip 目录下的 Kconfig 文件用于定义芯片相关的配置项,内容包括:
- 芯片型号(Chip Model)
- 芯片功能(Chip Features)
- 内部模块配置项(Internal Module Settings)
例如,nuttx/arch/arm/src/stm32f7/Kconfig 文件定义了 STM32F7 系列芯片的相关配置,支持不同型号的 flash 配置和片内驱动配置。
以下是针对 STM32F7 系列芯片的 Kconfig 配置片段示例,其中 ARCH_CHIP_STM32F722RC 和 ARCH_CHIP_STM32F722RE 都属于定义该芯片系列的选项,但两者具有不同的 flash 配置。
if ARCH_CHIP_STM32F7
comment "STM32 F7 Configuration Options"
choice
prompt "STM32 F7 Chip Selection"
default ARCH_CHIP_STM32F746NG
depends on ARCH_CHIP_STM32F7
config ARCH_CHIP_STM32F722RC
bool "STM32F722RC"
select STM32F7_STM32F722XX
select STM32F7_FLASH_CONFIG_C
select STM32F7_IO_CONFIG_R
---help---
STM32 F7 Cortex M7, 256 FLASH, 256K (176+16+64) Kb SRAM
config ARCH_CHIP_STM32F722RE
bool "STM32F722RE"
select STM32F7_STM32F722XX
select STM32F7_FLASH_CONFIG_E
select STM32F7_IO_CONFIG_R
---help---
STM32 F7 Cortex M7, 512 FLASH, 256K (176+16+64) Kb SRAM
...
endif
- choice 节点定义了芯片选择菜单,用户可通过该配置选择具体芯片型号。
- 各 config 项对应具体芯片型号,指定对应的特性和资源分配(如 flash 大小和 IO 配置)。
- select 关键字用于自动选择相应的配置子项。
芯片的片内驱动及各种硬件相关配置也可以在此 Kconfig 文件中进行定义和管理。
Make.defs 作用
Make.defs 文件用于管理参与编译的源文件列表,确保构建系统正确编译所需代码。在对应的 Make.defs 文件中,需要添加所有要参与编译的源文件,确保构建系统能够正确处理各模块代码。可参考 nuttx/arch/arm/src/stm32f7/Make.defs 示例文件。
7、chip.h 和 irq.h 文件说明
- chip.h 文件
- vendor/vendor_name/chip/chip_name 目录下有两个 chip.h 文件:
- 局部 chip.h:位于当前目录,定义与该芯片相关的宏和函数声明。
- 公共 chip.h:位于 include/chip.h,通过 #include <arch/chip/chip.h> 引用,定义与架构相关的宏和函数,被架构层公共代码使用。
- vendor/vendor_name/chip/chip_name 目录下有两个 chip.h 文件:
- irq.h 文件
- 结构类似:存在局部和公共两个层次。
- 公共 include/irq.h 负责架构通用中断相关定义。
- 局部 irq.h 针对具体芯片的中断定义。
- 引用建议
- 局部文件用于芯片特定代码,使用相对路径引用。
- 公共文件用于架构共享代码,通过标准 include 路径引用。
- 目的
- 明确区分局部与公共文件,避免混淆和冲突。
- 保证代码模块化,架构统一。
四、板级层适配
板级层适配主要完成以下内容:
- 链接脚本(Linker Script)
- 主 Make.defs
- etcramfs 构建
- Board 配置(Board Configs)
- Board 初始化代码
整体代码结构如下:
vendor/vendor_name/
├── boards
│ └── <chip_name>
│ └── <board_name>
│ ├── configs
│ │ └── nsh
│ │ └── defconfig
│ ├── include
│ │ ├── board.h
│ │ └── nsh_romfsimg.h
│ ├── Kconfig
│ ├── scripts
│ │ ├── ld.script
│ │ └── Make.defs
│ └── src
│ ├── board_name.h
│ ├── etc
│ │ ├── group
│ │ ├── init.d
│ │ │ ├── rcS
│ │ │ └── rc.sysinit
│ │ └── passwd
│ ├── Makefile
│ ├── <vendor_name>_appinit.c
│ ├── <vendor_name>_boot.c
│ └── <vendor_name>_bringup.c
1、初始化代码
阶段划分
- board_early_initialize:在 idle 任务前执行,早期硬件初始化。
- board_late_initialize:在 Appbringup 线程上下文执行,常规驱动初始化。
- board_app_initialize:在 nsh 任务上下文执行,文件系统与核心服务初始化。
- board_app_finalinitialize:在 nsh 任务上下文执行,应用相关初始化。
详细流程请参见启动流程,厂商需要按照外设所初始化的时刻写到对应的函数中。
示例代码
相关的文件包括:
- <vendor_name>_bringup.c
- <vendor_name>_appinit.c
- <vendor_name>_boot.c
示例代码可参考 nuttx/boards/arm/stm32f7/stm32f746g-disco/src/stm32_boot.c
#ifdef CONFIG_BOARD_EARLY_INITIALIZE
void board_early_initialize(void)
{
}
#endif
#ifdef CONFIG_BOARD_LATE_INITIALIZE
void board_late_initialize(void)
{
}
int board_app_initialize(uintptr_t arg)
{
}
#ifdef CONFIG_BOARDCTL_FINALINIT
int board_app_finalinitialize(uintptr_t arg)
{
}
#endif
2、ETCROMFS 构建
- 功能说明: 根文件系统以只读文件系统(ROMFS)形式存放于 Flash。
- 用途: 存储应用配置文件、密钥等敏感文件。
- 添加文件步骤:
- 在 Make.defs 中通过 RCRAWS 增加目标文件路径。
- 删除 etctmp 目录后,触发增量编译。
- 启动后,文件可通过 /etc/ 路径访问。
示例 Make.defs 配置
ifeq ($(CONFIG_ETC_ROMFS),y)
RCSRCS += etc/init.d/rc.sysinit etc/init.d/rcS
RCRAWS += etc/group etc/passwd
RCRAWS += etc/build.prop
RCRAWS += etc/txtable.txt
ifneq ($(CONFIG_UTILS_AVB_VERIFY)$(CONFIG_UTILS_ZIP_VERIFY),)
RCRAWS += etc/key.avb
endif
ifeq ($(CONFIG_ATS3085X_BOOTLOADER),y)
RCRAWS += etc/factory.sh
endif3、链接脚本
每个 board 可配置自定义链接脚本,该链接脚本在 board/Make.defs 中通过 LDSCRIPT 关键字指定。一般链接脚本存放于如下路径: vendor/vendor_name/boards/chip_name/board_name/scripts
例如:nuttx//boards/arm/stm32f7/stm32f746g-disco/scripts/flash.ld
链接脚本的要求包括:
- 设置 ENTRY 为 _vectors,以支持全局向量表。
- 若支持 backtrace,需添加 .arm.exidx 段。更多详情请参见 Backtrace。
链接脚本示例:
MEMORY
{
flash (rx) : ORIGIN = 0x10000000, LENGTH = 2560K
sram (rwx) : ORIGIN = 0x01000400, LENGTH = 111K
psram (rwx) : ORIGIN = 0x18000000, LENGTH = 4M
dsp_inner_ram (rwx) : ORIGIN = 0x01054000, LENGTH = 16K
share_ram (rwx) : ORIGIN = 0x0106A600, LENGTH = 22K
}
OUTPUT_ARCH(arm)
EXTERN(_vectors)
ENTRY(_stext)
SECTIONS {
.text : {
. = 0x200;
_stext = ABSOLUTE(.);
*(.vectors)
*(.text .text.*)
*(.fixup)
*(.gnu.warning)
*(.rodata .rodata.*)
*(.gnu.linkonce.t.*)
*(.glue_7)
*(.glue_7t)
*(.got)
*(.gcc_except_table)
*(.gnu.linkonce.r.*)
_etext = ABSOLUTE(.);
} > flash
}
4、配置文件(Configs)
每个 board 可包含多个配置文件(config files),通常以 nsh 配置启动系统,仅具基本功能,配置位置在: vendor/vendor_name/boards/chip_name/board_name/configs/nsh。
例如:nuttx/boards/arm/stm32f7/stm32f746g-disco/configs
注意
openvela 建议不要增加太多配置文件,以减少维护负担。
5、Kconfig、Makefile 和 Make.defs
-
Kconfig:定义板外设的配置项,包括外设驱动和板级配置。更多详情请参见 Kconfig 示例。
-
Makefile:将需要编译的源文件添加到构建中,最终生成 libboard.a。更多详情请参见 Makefile 示例。
-
scripts/Make.defs:顶层构建配置,包含系统配置 .config、Toolchain.defs、链接脚本及外部库引用等。详情请参见 Make.defs 示例。
示例 Make.defs 片段:
include $(TOPDIR)/.config include $(TOPDIR)/tools/Config.mk include $(TOPDIR)/arch/arm/src/armv7-m/Toolchain.defs LDSCRIPT = ld.script ARCHSCRIPT += $(BOARD_DIR)$(DELIM)scripts$(DELIM)$(LDSCRIPT) CFLAGS := $(ARCHCFLAGS) $(ARCHOPTIMIZATION) $(ARCHCPUFLAGS) $(ARCHINCLUDES) $(ARCHDEFINES) $(EXTRAFLAGS) -pipe CPICFLAGS = $(ARCHPICFLAGS) $(CFLAGS) CXXFLAGS := $(ARCHCXXFLAGS) $(ARCHOPTIMIZATION) $(ARCHCPUFLAGS) $(ARCHXXINCLUDES) $(ARCHDEFINES) $(EXTRAFLAGS) -pipe CXXPICFLAGS = $(ARCHPICFLAGS) $(CXXFLAGS) CPPFLAGS := $(ARCHINCLUDES) $(ARCHDEFINES) $(EXTRAFLAGS) AFLAGS := $(CFLAGS) -D__ASSEMBLY__ EXTRA_LIBS += $(wildcard $(shell readlink -f $(TOPDIR)/$(CONFIG_ARCH_BOARD_CUSTOM_DIR)/libs/$(CONFIG_ARCH_BOARD_CUSTOM_NAME))/*.a) EXTRA_LIBS += $(wildcard $(shell readlink -f $(TOPDIR)/$(CONFIG_ARCH_BOARD_CUSTOM_DIR)/libmedia/*.a))
6、board.h 与 nsh_romfsimg.h
- board.h:主要用于定义外设驱动和板级配置相关的宏或函数声明,通过 <arch/board/board.h> 引入。 可参考 nuttx/boards/arm/stm32f7/stm32f746g-disco/include/board.h 示例。
- nsh_romfsimg.h:自动生成的根文件系统内容,不建议手动修改。
7、工具链
厂商可导入自定义工具链,通常存放于 vendor/vendor_name/prebuilt。可通过 board/scripts/Make.defs 配置编译器、链接器工具路径等。
五、构建运行
openvela 支持两种编译方式:CMake 和 Make。
推荐使用以下 CMake 命令进行构建:
./build.sh vendor/vendor_name/board/chip_name/configs/nsh --cmake -j8
执行上述命令后,将生成 vela_ap.bin 文件,厂商可采用相应的烧录方式进行运行验证。
六、测试验证
厂商完成适配后,需要通过准入测试进行检验,主要包括以下几个方面:
- 功能测试
- 稳定性测试
- 性能测试

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 0
0 0
0- 0



 已为社区贡献185条内容
已为社区贡献185条内容

所有评论(0)