
openvela Arch Timer 驱动框架使用指南
一、概述
本文主要介绍基于 Timer Driver 的 Arch Timer 驱动框架实现,以及相关接口的使用和具体实现说明。本文适用于以下场景:
1、什么是 Arch Timer
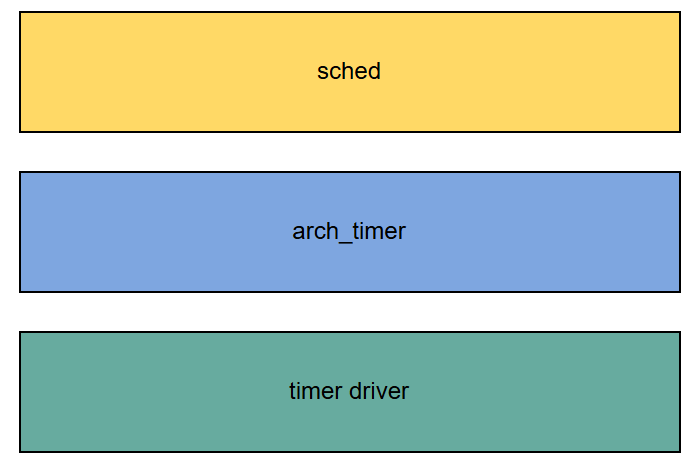
Arch Timer 是基于 Timer Driver 实现的间隔定时器。它提供了一系列 timer 接口,供操作系统中的 sched 模块使用,同时支持以下两种工作模式:
- Tickless 模式:允许更灵活高效的系统调度。
- Tick 模式:提供固定时间间隔的调度机制。
Arch timer 在系统中的位置框架如下图所示:
2、Arch Timer 的驱动框架
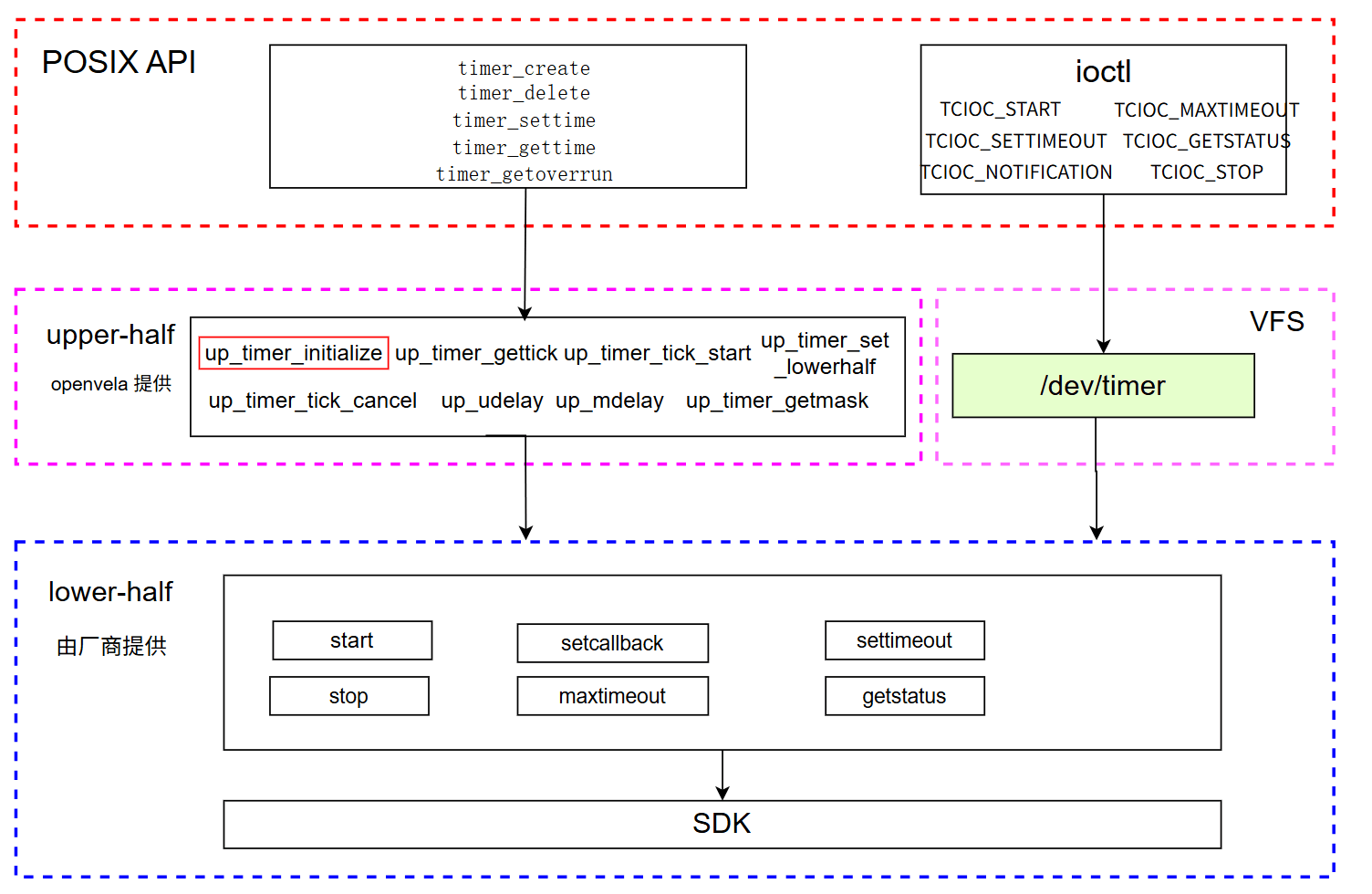
Arch Timer 的整体架构和相关接口设计如下图所示。
- upper-half 部分:由 openvela 提供,其中 up_timer_initialize 接口需由芯片厂商实现。
- lower-half 部分:需芯片厂商进行适配。
- 应用程序可通过标准的 POSIX API 接口 或 ioctl 接口,调用 upper-half 或 lower-half 接口,完成相应功能。
二、Arch Timer 接口
sched 模块依赖于由 arch 模块提供的定时器接口,这些接口均定义在 /include/nuttx/arch.h 头文件中。
在 Tickless 模式下,这些接口根据时间单位的不同划分为两组:
- 基于微秒(us)的接口。
- 基于计时单元(tick)的接口。
开发者可以通过配置选项 CONFIG_SCHED_TICKLESS_TICK_ARGUMENT 来选择启用哪一种接口。为了减少 sched 和 arch 模块之间的时间单位转换,arch`` ``timer 默认支持 tick 接口,以确保运行效率。
以下对接口功能进行简要说明。
Arch Timer 接口说明
-
up_timer_set_lowerhalf
初始化 Arch Timer 定时器,设置一个 timer``_``lowerhalf``_s 实例,并启动定时器。
void up_timer_set_lowerhalf(FAR struct timer_lowerhalf_s *lower) -
up_timer_tick_start
启动定时器,仅在 Tickless 模式下使用。该函数的参数为定时器的超时时间,单位为 tick。
int weak_function up_timer_tick_start(clock_t ticks) -
up_timer_tick_cancel
停止 Arch Timer 定时器,仅在 Tickless 模式中使用。执行时会返回定时器当前剩余的 tick 数。
int weak_function up_timer_tick_cancel(FAR clock_t *ticks) -
up_timer_getmask
获取定时器支持的时间掩码(mask)的值。
void weak_function up_timer_getmask(FAR clock_t *mask) -
up_timer_gettick
获取定时器当前已经经过的 tick 数值。
int weak_function up_timer_gettick(FAR clock_t *ticks) -
up_udelay
实现以微秒(us)为单位的延时操作,用于精确延时。
void weak_function up_udelay(useconds_t microseconds) -
up_mdelay
实现以毫秒(ms)为单位的延时操作,用于较长的延时需求。
void weak_function up_mdelay(unsigned int milliseconds)
三、Timer Driver 简介
openvela 提供了一个通用的定时器(Timer)驱动。该驱动依据 openvela 的驱动框架,分为两个层级:
- upper half: 为应用级别的程序提供 timer 的通用接口。此层已由 openvela 提供,应用开发者无需修改。
- lower half: 基于特定平台的驱动程序,用于实现硬件级别的控制和适配。此层是驱动开发者的重点工作对象。
Timer 驱动相关接口的定义可以在 /include/nuttx/timers/timer.h 文件中找到,接口同样分为 upper half 和 lower half 两层。
1、配置说明
在 board 适配时,需要配置以下三个关键选项来启用和调整 Timer Driver 功能。
配置驱动
- 启用 Timer Driver。 通过设置 CONFIG_TIMER,启用 Timer Driver 功能,使定时器驱动可用。
- 使能 Arch Timer。 配置 CONFIG_TIMER_ARCH 选项以启用 arch`` ``timer 模块。该选项允许在体系结构层面支持架构相关的定时器功能。
-
启用 Tickless 模式。 配置 CONFIG_SCHED_TICKLESS 可启用 Tickless 模式。
- Tickless 模式的特点: 无周期性时钟中断。在没有任务执行时,系统进入空闲(Idle)模式,并在下一次任务执行或中断时恢复。
配置文件路径
以下是 Tickless 模式下 Timer Driver 的相关配置文件路径:
-
文件:sched/Kconfig
# sched/Kconfig config SCHED_TICKLESS depends on ARCH_HAVE_TICKLESS config SCHED_TICKLESS_TICK_ARGUMENT config SCHED_TICKLESS_LIMIT_MAX_SLEEP -
文件:drivers/timers/Kconfig
# drivers/timers/Kconfig config TIMER ...... if TIMER config TIMER_ARCH select ARCH_HAVE_TICKLESS select ARCH_HAVE_TIMEKEEPING select SCHED_TICKLESS_LIMIT_MAX_SLEEP if SCHED_TICKLESS select SCHED_TICKLESS_TICK_ARGUMENT if SCHED_TICKLESS #endif
配置检查命令
通过以下命令检查是否正确配置了相关选项,该命令会搜索 nuttx 配置文件中的以下选项,并验证是否已启用:
grep -rE "CONFIG_TIMER|CONFIG_TIMER_ARCH|CONFIG_ARCH_HAVE_TICKLESS|CONFIG_ARCH_HAVE_TIMEKEEPING|CONFIG_SCHED_TICKLESS_TICK_ARGUMENT|CONFIG_SCHED_TICKLESS_LIMIT_MAX_SLEEP" nuttx/.config
2、初始化
在 board 初始化过程,需要调用具体 Vendor 实现的 ***_timer_initialize 函数完成初始化。该函数会完成以下操作:
- 分配并初始化 struct timer_lowerhalf_s 结构实例。
-
利用 timer_register 函数将 timer_lowerhalf_s 实例注册为 Timer 驱动。
- 注册过程会生成 /dev/timer 设备节点。
- 同时将 struct file_operations 和 g_timerops 实例绑定到 timer_lowerhalf_s 实例。
在平台代码中,需要实现 up_timer_initialize 函数,用于调用 up_timer_set_lowerhalf 函数,将 ***_timer_initialize 返回的实例绑定到系统中,作为系统定时器。
相关接口定义在:/include/nuttx/timers/timer.h。
timer_register 函数说明
以下是 timer_register 函数的详细说明,此函数将 lower half 的 Timer 驱动实例与 upper half 的 Timer 设备绑定,并注册设备以供应用程序使用。
/****************************************************************************
* Name: timer_register
*
* Description:
* This function binds an instance of a "lower half" timer driver with the
* "upper half" timer device and registers that device so that can be used
* by application code.
*
* When this function is called, the "lower half" driver should be in the
* disabled state (as if the stop() method had already been called).
*
* NOTE: Normally, this function would not be called by application code.
* Rather it is called indirectly through the architecture-specific
* initialization.
*
* Input Parameters:
* dev path - The full path to the driver to be registered in the NuttX
* pseudo-filesystem. The recommended convention is to name all timer
* drivers as "/dev/timer0", "/dev/timer1", etc. where the driver
* path differs only in the "minor" number at the end of the device name.
* lower - A pointer to an instance of lower half timer driver. This
* instance is bound to the timer driver and must persists as long as
* the driver persists.
*
* Returned Value:
* On success, a non-NULL handle is returned to the caller. In the event
* of any failure, a NULL value is returned.
*
****************************************************************************/
FAR void *timer_register(FAR const char *path,
FAR struct timer_lowerhalf_s *lower);
3、upper-half 接口
upper-half 接口为内核中的各个模块提供标准化的 Timer 功能,并支持以下模式:
- Tickless 模式:根据时间单位不同,接口分为两组:struct timespec 和 tick 接口。
- Tick 模式:默认支持 tick 接口,以减少 sched 和 arch 模块的时间转换工作。
开发者可以通过配置选项 CONFIG_SCHED_TICKLESS_TICK_ARGUMENT 以选择启用哪种接口。
upper-half 接口主要供 sched 调用。sched 所需的 Timer 接口定义可以在 /include/nuttx/arch.h 文件中找到,接口说明参见 Arch Timer 接口。
4、lower-half 接口
lower-half 驱动通过提供标准化的 struct timer_ops_s 接口,供以下组件使用:
- upper-half
- ioctl 系统调用
- 其他驱动程序
- 内核模块
接口分组
-
lower-half 的接口根据时间单位分为两组:
- 以 struct timespec 为单位。
- 以 tick 为单位。
-
开发者根据所需的精度和性能需求选择实现其中一组接口。未被实现的接口已在 timer.h 头文件中提供默认实现。
接口定义
以下是 struct timer_ops_s 的详细定义:
struct timer_ops_s
{
/* Required methods *******************************************************/
CODE int (*start)(FAR struct timer_lowerhalf_s *lower);
CODE int (*stop)(FAR struct timer_lowerhalf_s *lower);
CODE int (*getstatus)(FAR struct timer_lowerhalf_s *lower,
FAR struct timer_status_s *status);
CODE int (*settimeout)(FAR struct timer_lowerhalf_s *lower,
uint32_t timeout);
CODE void (*setcallback)(FAR struct timer_lowerhalf_s *lower,
CODE tccb_t callback, FAR void *arg);
CODE int (*maxtimeout)(FAR struct timer_lowerhalf_s *lower,
FAR uint32_t *maxtimeout);
CODE int (*ioctl)(FAR struct timer_lowerhalf_s *lower, int cmd,
unsigned long arg);
CODE int (*tick_getstatus)(FAR struct timer_lowerhalf_s *lower,
FAR struct timer_status_s *status);
CODE int (*tick_setttimeout)(FAR struct timer_lowerhalf_s *lower,
uint32_t timeout);
CODE int (*tick_maxtimeout)(FAR struct timer_lowerhalf_s *lower,
FAR uint32_t *maxtimeout);
};
以下是部分接口的功能说明。
-
TIMER_START
启动 Timer 定时器。传入的启动时间为相对时间。
/* * 函数:start * 参数:struct timer_lowerhalf_s *lower * 返回: * 说明:启动alarm定时器,只在Tickless模式使用,入参为alarm的超时时间,单位为tick, * 相对时间; */ /* 以struct timespec为单位的接口 */ CODE int (*start)(FAR struct timer_lowerhalf_s *lower); -
TIMER_STOP
停止 Timer 定时器。
/* 停止timer计时器 */ CODE int (*stop)(FAR struct timer_lowerhalf_s *lower); -
TIMER_GETSTATUS/TIMER_TICK_GETSTATUS
获取 Timer 定时器的当前状态。接口以两种单位实现:
-
微秒 (us):
/* 以us为单位的接口 */ CODE int (*getstatus)(FAR struct timer_lowerhalf_s *lower, FAR struct timer_status_s *status); -
tick
/* 以tick为单位的接口 */ CODE int (*tick_getstatus)(FAR struct timer_lowerhalf_s *lower, FAR struct timer_status_s *status);
-
-
TIMER_MAXTIMEOUT/TIMER_TICK_MAXTIMEOUT
获取 Timer 支持的最大超时时间。
-
以微秒 (us) 为单位:
/* 以us为单位的接口 */ CODE int (*maxtimeout)(FAR struct timer_lowerhalf_s *lower, FAR uint32_t *maxtimeout); -
以 tick 为单位:
/* 以tick为单位的接口 */ CODE int (*tick_maxtimeout)(FAR struct timer_lowerhalf_s *lower, FAR uint32_t *maxtimeout);
-
-
TIMER_SETCALLBACK
设置 Timer 的超时回调函数。
CODE void (*setcallback)(FAR struct timer_lowerhalf_s *lower, CODE tccb_t callback, FAR void *arg); -
TIMER_IOCTL
lower-half 的 ioctl 接口,用于处理 upper-half 驱动未识别的命令。
CODE int (*ioctl)(FAR struct timer_lowerhalf_s *lower, int cmd, unsigned long arg);
lower-half 接口的实现请参见 lower-half 接口实现。
四、调用流程说明
在 Tickless 模式和 Tick 模式下,Arch Timer 与其他模块的调用关系存在差异。具体如下所示。
1、Tickless 模式
模式概述
在 Tickless 模式下:
- sched(调度模块)动态管理软件定时器(wd),选择当前最短时长的 wd 作为下一次超时的定时器时长。
- 具体实现中,sched 会根据当前 wd 的状态动态调用 timer 定时器的启动或停止函数。
调用流程图
以下为 Tickless 模式下的调用流程图:
-
初始化定时器。
- 在系统初始化阶段,arch timer 完成初始化,同时调用 up_timer_set_lowerhalf 绑定定时器实例。
-
计算超时。
- sched 查询所有当前已注册的 wd,选择最短的超时时间作为下一次待执行的时间。
-
配置定时器。
- 调用 TIMER_TICK_SETTIMEOUT 设置新定时器超时时间。
- 调用 up_timer_tick_start 启动定时器。
-
触发超时回调。
- 当定时器超时时,触发 timer_callback 回调函数,通知 sched 超时事件。
-
后续调度。
- nxsched_resume_timer 重新为定时器分配超时时长,并根据需要启动下一个定时器或任务。
2、Tick 模式
模式概述
在 Tick 模式下:
- sched 启用一个固定时间间隔的周期性定时器(arch timer)。
- 定时器的时间间隔按照 CONFIG_USEC_PER_TICK 微秒配置,并随着系统工作周期而固定运行。
- 系统在初始化 arch timer 时即启动周期性定时器,无需频繁调用 start 和 stop 接口。
流程描述
-
定时器初始化。
- arch timer 在初始化阶段直接启动周期性定时器,时间间隔为 CONFIG_USEC_PER_TICK 微秒。
-
周期性触发。
- 定时器按照固定周期触发事件,无需动态计算超时时间。
- 减少了 start 和 stop 接口的调用频率。
-
实时性保证。
- 每次定时器超时,触发调度器进行调度,以满足周期性任务的执行需求。
五、驱动适配实例
以 nrf52(基于 ARMv7-M 架构)为例,arch timer 驱动适配主要包括两部分工作:
- 实现初始化接口 up_timer_initialize 并注册 timer_register。
- 实现 lower-half 接口以控制硬件运行。
以下将分别介绍这两部分的具体实现。
1、实现接口 up_timer_initialize
在初始化阶段,需调用 up_timer_initialize 和 timer_register 来完成定时器的注册。timer_register 接口已实现,开发者需要在平台特定代码中实现 up_timer_initialize。
初始化调用流程
以下为定时器初始化的调用关系参考:
nx_start
-> clock_initialize
-> up_timer_initialize #开发者实现
-> systick_initialize #开发者实现
-> timer_register
-> up_timer_set_lowerhalf
相关代码文件路径:arch/arm/src/armv7-m/arm_systick.c
示例代码
以下为 systick_initialize 的实现参考:
struct timer_lowerhalf_s *systick_initialize(bool coreclk,
unsigned int freq, int minor)
{
struct systick_lowerhalf_s *lower =
(struct systick_lowerhalf_s *)&g_systick_lower;
...
/* Register the timer driver if need */
if (minor >= 0)
{
char devname[32];
sprintf(devname, "/dev/timer%d", minor);
timer_register(devname, (struct timer_lowerhalf_s *)lower);
}
return (struct timer_lowerhalf_s *)lower;
}
2、实现 lower-half 接口
lower-half 是实现硬件功能的驱动接口部分,开发者需要实现并定义各具体方法。以下为开发者需要关注的内容:
lower-half 方法
在 ARMv7-M 的 Arch Timer 适配中,lower-half 方法的出现形式如下:
文件路径: arch/arm/src/armv7-m/arm_systick.c
/* "Lower half" driver methods */
static const struct timer_ops_s g_systick_ops =
{
.start = systick_start,
.stop = systick_stop,
.getstatus = systick_getstatus,
.settimeout = systick_settimeout,
.setcallback = systick_setcallback,
.maxtimeout = systick_maxtimeout,
};
六、POSIX API 简介
本章节简要介绍定时器和时钟相关的 POSIX API 接口,开发者可参考这些接口进行定时器操作。接口的详细用法请参见测试实例。
1、TIMER API
以下是定时相关 POSIX API 的简要概述,这些接口的具体使用方法请参考相关的 man 页面。
头文件位置:include/time.h
-
timer_create
/* * 函数:timer_create * 参数:clockid,定时类型;evp,sigevent结构体,用来指定定时器到期时如何相应 * timerid,返回一个timerid * 返回:0 success | -1 error * 说明:创建一个定时器 */ int timer_create(clockid_t clockid, FAR struct sigevent *evp, FAR timer_t *timerid); -
timer_delete
/* * 函数:timer_delete * 参数:timerid,执行timer_create返回的timerid * 返回:0 success | -1 error * 说明:删除一个定时器 */ int timer_delete(timer_t timerid); -
timer_settime
/* 设置定时器 * 函数:timer_settime * 参数:timerid:id * flags:相对时间/绝对时间 * value:定时时间和间隔 * ovalue:若不为NULL,则返回上次定时的剩余到期时间 * 返回:0 success | -1 error * 说明:设置定时 */ int timer_settime(timer_t timerid, int flags, FAR const struct itimerspec *value, FAR struct itimerspec *ovalue); -
timer_gettime
/* * 函数: timer_gettime * 参数: timerid:id * value:传入itimerspec * 返回值:0 success | -1 error * 说明: 获取当前定时器的剩余到期时间 * */ int timer_gettime(timer_t timerid, FAR struct itimerspec *value); -
timer_getoverrun
/* * 函数: up_timer_gettime * 参数: timerid * 返回值: 定时器超时次数 */ int timer_getoverrun(timer_t timerid);
2、IOCTL 接口
应用级别的程序可以通过 ioctl 函数直接操作定时器(前提是在 bringup 过程中已注册 /dev/timer 设备节点)。
支持的 IOCTL 命令
以下是当前支持的 IOCTL 命令,相关接口定义在 include/nuttx/timers/timer.h 中:
- TCIOC_START:启动定时器。
- TCIOC_STOP:停止定时器。
- TCIOC_GETSTATUS:获取当前定时器的状态,参数类型为 struct timer_status_s*。
- TCIOC_SETTIMEOUT:设置定时器间隔时间,参数为 32 位的定时器时长,以微秒(us)为单位。
- TCIOC_NOTIFICATION:设置定时器超时消息,参数类型为 struct timer_notify_s*。
- TCIOC_MAXTIMEOUT:获取定时器最大时延,参数类型为 uint32_t *,单位为微秒(us)。
七、测试实例
本章介绍如何通过 IOCTL 接口 和 POSIX API 测试定时器的功能,使用开源测试框架 cmocka 进行验证,测试实例包括:
- API 测试
- IOCTL 接口测试
下面分别说明和展示代码实现。
1、TIMER API 测试实例
此部分介绍如何测试定时器相关功能,通过 cmocka 测试框架验证 POSIX API 的工作,包括创建、配置、以及删除定时器的全过程。
-
代码位置:apps/testing/drivertest/drivertest_posix_timer.c
-
测试框架:cmocka
-
依赖配置:
- TESTING_CMOCKA
- TESTING_DRIVER_TEST
- CONFIG_SIG_EVTHREAD
-
运行步骤:
-
启用上述配置,并构建固件。
-
在 NuttShell(NSH)中运行以下命令:
nsh> cmocka_posix_timer
-
测试说明
该实例通过定时器的 POSIX API 测试以下功能:
- 定时器创建:测试 timer_create API,实现定时器的创建。
- 定时器配置:测试 timer_settime 和 timer_gettime API,验证定时器的时间设置和获取。
- 定时器触发:测试定时器使用期间的回调函数工作。
- 定时器删除:通过 timer_delete 验证定时器资源是否正确释放。
下面是代码的具体说明,每一步均配有注释,便于理解。
代码实现
该实例为 openvela 的嵌入式定时器测试提供了完整实用的参考代码,适用于驱动开发和功能验证的实际场景。以下是完整的测试代码:
/****************************************************************************
* Included Files
****************************************************************************/
#include <nuttx/config.h>
#include <stdio.h>
#include <signal.h>
#include <time.h>
#include <string.h>
#include <unistd.h>
#include <setjmp.h>
#include <cmocka.h>
#include <syslog.h>
#include <nuttx/timers/timer.h>
/****************************************************************************
* Pre-processor Definitions
****************************************************************************/
#define DEFAULT_TIME_OUT 2
#define DEFAULT_INTERVAL 1
#define SLEEPSECONDS 5
#define COMEINCALLBACK 0
#define OPTARG_TO_VALUE(value, type, base) \
do \
{ \
FAR char *ptr; \
value = (type)strtoul(optarg, &ptr, base); \
if (*ptr != '\0') \
{ \
printf("Parameter error: -%c %s\n", ch, optarg); \
show_usage(argv[0], EXIT_FAILURE); \
} \
} while (0)
/****************************************************************************
* Private Types
****************************************************************************/
struct posix_timer_state_s
{
struct itimerspec it;
};
/****************************************************************************
* Private Data
****************************************************************************/
/****************************************************************************
* Private Functions
****************************************************************************/
/****************************************************************************
* Name: show_usage
****************************************************************************/
static void show_usage(FAR const char *progname, int exitcode)
{
printf("Usage: %s"
" -s <seconds> -i <interval>\n",
progname);
exit(exitcode);
}
/****************************************************************************
* Name: parse_commandline
****************************************************************************/
static void parse_commandline(
FAR struct posix_timer_state_s *posix_timer_state,
int argc, FAR char **argv)
{
int ch;
int converted;
while ((ch = getopt(argc, argv, "s:i:")) != ERROR)
{
switch (ch)
{
case 's':
OPTARG_TO_VALUE(converted, uint32_t, 10);
if (converted < 1 || converted > INT_MAX)
{
printf("signal out of range: %d\n", converted);
show_usage(argv[0], EXIT_FAILURE);
}
posix_timer_state->it.it_value.tv_sec = (uint32_t)converted;
break;
case 'i':
OPTARG_TO_VALUE(converted, uint32_t, 10);
if (converted < 1 || converted > INT_MAX)
{
printf("signal out of range: %d\n", converted);
show_usage(argv[0], EXIT_FAILURE);
}
posix_timer_state->it.it_interval.tv_sec = (uint32_t)converted;
break;
case '?':
printf("Unsupported option: %s\n", optarg);
show_usage(argv[0], EXIT_FAILURE);
break;
}
}
}
/****************************************************************************
* Name: posix_timer_callback
****************************************************************************/
static void posix_timer_callback(union sigval unused)
{
syslog(LOG_DEBUG, "callback trigger!!!\n");
}
/****************************************************************************
* Name: test_case_posix_timer
****************************************************************************/
static void test_case_posix_timer(FAR void **state)
{
int ret;
timer_t timerid;
struct sigevent event;
FAR struct posix_timer_state_s *posix_timer_state;
struct itimerspec it;
memset(&it, 0, sizeof(it));
posix_timer_state = (FAR struct posix_timer_state_s *)*state;
event.sigev_notify = SIGEV_THREAD;
event.sigev_notify_function = posix_timer_callback;
event.sigev_notify_attributes = NULL;
/* Create the timer */
ret = timer_create(CLOCK_MONOTONIC, &event, &timerid);
assert_return_code(ret, OK);
/* Start the timer */
ret = timer_settime(timerid, 0, &(posix_timer_state->it), NULL);
assert_return_code(ret, OK);
/* Get the timer status */
ret = timer_gettime(timerid, &it);
assert_return_code(ret, OK);
assert_in_range(it.it_value.tv_sec, 0,
posix_timer_state->it.it_value.tv_sec);
assert_return_code(it.it_interval.tv_sec,
posix_timer_state->it.it_interval.tv_sec);
sleep(SLEEPSECONDS);
/* Delete the timer */
ret = timer_delete(timerid);
assert_return_code(ret, OK);
}
int main(int argc, FAR char *argv[])
{
struct posix_timer_state_s posix_timer_state =
{
.it.it_value.tv_sec = DEFAULT_TIME_OUT,
.it.it_value.tv_nsec = 0,
.it.it_interval.tv_sec = DEFAULT_INTERVAL,
.it.it_interval.tv_nsec = 0
};
const struct CMUnitTest tests[] =
{
cmocka_unit_test_prestate(test_case_posix_timer, &posix_timer_state)
};
parse_commandline(&posix_timer_state, argc, argv);
return cmocka_run_group_tests(tests, NULL, NULL);
}
2、IOCTL 测试实例
本章介绍如何通过 IOCTL 接口测试定时器功能,测试代码使用了开源框架 cmocka。
-
代码路径:apps/testing/drivertest/drivertest_timer.c
-
测试框架:cmocka
-
依赖配置:
- TESTING_CMOCKA
- TESTING_DRIVER_TEST
-
测试步骤:
- 启用依赖配置,并构建功能完整的固件。
- 在 NuttShell(NSH)中运行以下命令:
nsh> cmocka_driver_timer
测试说明
通过 IOCTL 接口的命令控制定时器设备(如 /dev/timerX),实现如下功能:
- 启动定时器:通过 TCIOC_START 控制指令启动定时器。
- 停止定时器:通过 TCIOC_STOP 控制指令停止定时器。
- 设置定时器间隔:使用 TCIOC_SETTIMEOUT 动态调整触发间隔。
- 注册回调:通过 TCIOC_NOTIFICATION 注册定时器超时后的 SIG 动作。
- 校验时间间隔准确性:通过对时间戳的采样和校验,验证定时器的时间精度。
代码实现
以下是实现上述功能的核心代码及其说明。
/****************************************************************************
* Included Files
****************************************************************************/
#include <nuttx/config.h>
#include <sys/ioctl.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <signal.h>
#include <errno.h>
#include <string.h>
#include <stdarg.h>
#include <stddef.h>
#include <setjmp.h>
#include <stdint.h>
#include <cmocka.h>
#include <nuttx/timers/timer.h>
/****************************************************************************
* Pre-processor Definitions
****************************************************************************/
#define TIMER_DEFAULT_DEVPATH "/dev/timer0"
#define TIMER_DEFAULT_INTERVAL 1000000
#define TIMER_DEFAULT_NSAMPLES 20
#define TIMER_DEFAULT_SIGNO 17
#define TIMER_DEFAULT_RANGE 1
#define OPTARG_TO_VALUE(value, type, base) \
do \
{ \
FAR char *ptr; \
value = (type)strtoul(optarg, &ptr, base); \
if (*ptr != '\0') \
{ \
printf("Parameter error: -%c %s\n", ch, optarg); \
show_usage(argv[0], timer_state, EXIT_FAILURE); \
} \
} while (0)
/****************************************************************************
* Private Types
****************************************************************************/
struct timer_state_s
{
char devpath[PATH_MAX];
uint32_t interval;
uint32_t nsamples;
uint32_t signo;
uint32_t range;
};
/****************************************************************************
* Private Data
****************************************************************************/
/****************************************************************************
* Private Functions
****************************************************************************/
/****************************************************************************
* Name: get_timestamp
****************************************************************************/
static uint32_t get_timestamp(void)
{
struct timespec ts;
uint32_t ms;
clock_gettime(CLOCK_MONOTONIC, &ts);
ms = ts.tv_sec * 1000 + ts.tv_nsec / 1000000;
return ms;
}
/****************************************************************************
* Name: show_usage
****************************************************************************/
static void show_usage(FAR const char *progname,
FAR struct timer_state_s *timer_state, int exitcode)
{
printf("Usage: %s"
" -d <devpath> -i <interval> -n <nsamples> -r <range> -s <signo>\n",
progname);
printf(" [-d devpath] selects the TIMER device.\n"
" Default: %s Current: %s\n",
TIMER_DEFAULT_DEVPATH, timer_state->devpath);
printf(" [-i interval] timer interval in microseconds.\n"
" Default: %d Current: %" PRIu32 "\n",
TIMER_DEFAULT_INTERVAL, timer_state->interval);
printf(" [-n nsamples] timer samples will be collected numbers.\n"
" Default: %d Current: %" PRIu32 "\n",
TIMER_DEFAULT_NSAMPLES, timer_state->nsamples);
printf(" [-r range] the max range of timer delay.\n"
" Default: %d Current: %" PRIu32 "\n",
TIMER_DEFAULT_RANGE, timer_state->range);
printf(" [-s signo] used to notify the test of timer expiration events.\n"
" Default: %d Current: %" PRIu32 "\n",
TIMER_DEFAULT_SIGNO, timer_state->signo);
printf(" [-h] = Shows this message and exits\n");
exit(exitcode);
}
/****************************************************************************
* Name: parse_commandline
****************************************************************************/
static void parse_commandline(FAR struct timer_state_s *timer_state,
int argc, FAR char **argv)
{
int ch;
int converted;
while ((ch = getopt(argc, argv, "d:i:n:r:s:h")) != ERROR)
{
switch (ch)
{
case 'd':
strncpy(timer_state->devpath, optarg,
sizeof(timer_state->devpath));
timer_state->devpath[sizeof(timer_state->devpath) - 1] = '\0';
break;
case 'i':
OPTARG_TO_VALUE(converted, uint32_t, 10);
if (converted < 1 || converted > INT_MAX)
{
printf("signal out of range: %d\n", converted);
show_usage(argv[0], timer_state, EXIT_FAILURE);
}
timer_state->interval = (uint32_t)converted;
break;
case 'n':
OPTARG_TO_VALUE(converted, uint32_t, 10);
if (converted < 1 || converted > INT_MAX)
{
printf("signal out of range: %d\n", converted);
show_usage(argv[0], timer_state, EXIT_FAILURE);
}
timer_state->nsamples = (uint32_t)converted;
break;
case 'r':
OPTARG_TO_VALUE(converted, uint32_t, 10);
if (converted < 1 || converted > INT_MAX)
{
printf("signal out of range: %d\n", converted);
show_usage(argv[0], timer_state, EXIT_FAILURE);
}
timer_state->range = (uint32_t)converted;
break;
case 's':
OPTARG_TO_VALUE(converted, uint32_t, 10);
if (converted < 1 || converted > INT_MAX)
{
printf("signal out of range: %d\n", converted);
show_usage(argv[0], timer_state, EXIT_FAILURE);
}
timer_state->signo = (uint32_t)converted;
break;
case '?':
printf("Unsupported option: %s\n", optarg);
show_usage(argv[0], timer_state, EXIT_FAILURE);
break;
}
}
}
/****************************************************************************
* Name: test_case_timer
****************************************************************************/
static void test_case_timer(FAR void **state)
{
int i;
int fd;
int ret;
uint32_t range;
uint32_t tim;
struct sigaction act;
struct timer_notify_s notify;
FAR struct timer_state_s *timer_state;
timer_state = (FAR struct timer_state_s *)*state;
/* Open the timer device */
fd = open(timer_state->devpath, O_RDONLY);
assert_true(fd > 0);
/* Show the timer status before setting the timer interval */
ret = ioctl(fd, TCIOC_SETTIMEOUT, timer_state->interval);
assert_return_code(ret, OK);
act.sa_sigaction = NULL;
act.sa_flags = SA_SIGINFO;
sigfillset(&act.sa_mask);
sigdelset(&act.sa_mask, timer_state->signo);
ret = sigaction(timer_state->signo, &act, NULL);
assert_in_range(ret, 0, timer_state->signo);
/* Register a callback for notifications using the configured signal.
* NOTE: If no callback is attached, the timer stop at the first interrupt.
*/
notify.pid = getpid();
notify.periodic = true;
notify.event.sigev_notify = SIGEV_SIGNAL;
notify.event.sigev_signo = timer_state->signo;
notify.event.sigev_value.sival_ptr = NULL;
ret = ioctl(fd, TCIOC_NOTIFICATION, (unsigned long)((uintptr_t)¬ify));
assert_return_code(ret, OK);
/* Start the timer */
ret = ioctl(fd, TCIOC_START, 0);
assert_return_code(ret, OK);
/* Set the timer interval */
for (i = 0; i < timer_state->nsamples; i++)
{
tim = get_timestamp();
usleep(2 * timer_state->interval);
tim = get_timestamp() - tim;
range = abs(timer_state->interval / 1000 - tim);
assert_in_range(range, 0, timer_state->range);
}
/* Stop the timer */
ret = ioctl(fd, TCIOC_STOP, 0);
assert_return_code(ret, OK);
/* Detach the signal handler */
act.sa_handler = SIG_DFL;
sigaction(timer_state->signo, &act, NULL);
/* Close the timer driver */
close(fd);
}
/****************************************************************************
* Public Functions
****************************************************************************/
/****************************************************************************
* Name: drivertest_timer_main
****************************************************************************/
int main(int argc, FAR char *argv[])
{
struct timer_state_s timer_state =
{
.devpath = TIMER_DEFAULT_DEVPATH,
.interval = TIMER_DEFAULT_INTERVAL,
.nsamples = TIMER_DEFAULT_NSAMPLES,
.range = TIMER_DEFAULT_RANGE,
.signo = TIMER_DEFAULT_SIGNO
};
parse_commandline(&timer_state, argc, argv);
const struct CMUnitTest tests[] =
{
cmocka_unit_test_prestate(test_case_timer, &timer_state)
};
return cmocka_run_group_tests(tests, NULL, NULL);
}
openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 0
0 0
0- 0



 已为社区贡献185条内容
已为社区贡献185条内容

所有评论(0)