目录
前言
课题背景和意义
实现技术思路
一、方法理论
二、试验与分析
实现效果图样例
最后
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导: https://blog.csdn.net/qq_37340229/article/details/128243277
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯毕业设计-基于街景影像中行人车辆检测方法 -YOLO
课题背景和意义
车辆等移动平台搭载全景相机 、 全球导航卫星系统接收机 、 惯性测量单元等传感器 , 可以采集360° 的街景 。 在街景影像中检测行人车辆 , 一方面可以在数据发布时更好地保护隐私 , 另一方面可以为城市治理能力提升提供数据支撑。 由于街景影像具有表达环境复杂 、 数据量庞大 、 目标距离变化大等特点 , 现有的行人车辆检测算法应用时均存在一定局限。 为此 , 提出一种兼顾效率和精度的街景影像中行人车辆检测方法, 利用球形投影原理和先验知识从街景的经纬映射图中划分出目标区域 , 接着使用你只观察一次 ( You Only Look Once, YOLO ) v4 模型从目标区域检测行人和车辆。街景影像和一般近景影像具有较大区别: 首先是表达的环境复杂,街景影像里可能有建筑、 车辆、行人、植被、道路、交通标示、城市部件等各种各样的地物; 数据量庞大,单张街景影像的经纬映射图可达到数千万甚至上亿的像素; 目标距离变化大,导致同样的目标在影像中尺寸和清晰度差异很大。这就导致现有的行人、车辆检测方法在应用到街景影像中时均存在一定的局限性。 街景影像中行人车辆检测方法能够减少算法的搜索数据量和范围,提高后续检测的速度并降低误检率。
实现技术思路
一、方法理论
街景有效区域提取
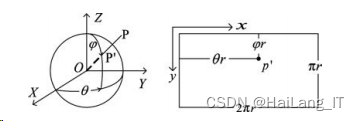
街景影像通常采用的是三维球形投影 ,但在计算机中为了便于存储、传输,采用了经纬映射图的格式。经纬映射图的图像坐标( x,y) 与球面经纬度( θ,φ) 的转换关系如图所示。其中 P 为实际地物点坐标,P'为地物点在全景球面上的坐标,p'为地物点在经纬映射图中的坐标,r 为全景球的半径。
根据经纬映射图的原理,其 y 坐标与影像高度的比值 φ,即摄影中心到地物连线与天顶的夹角。其 x 坐标与影像宽度的比值 θ,即摄影中心到地物连线的方位角。
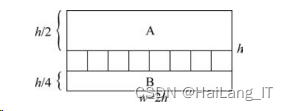
剩下的区域是需要重点检测的部分,按照深度学习处理图像的特点,继续将其划分为 8 块边长为 h /4 的正方形图像块。
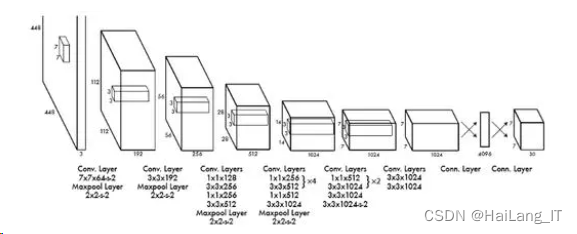
目标检测
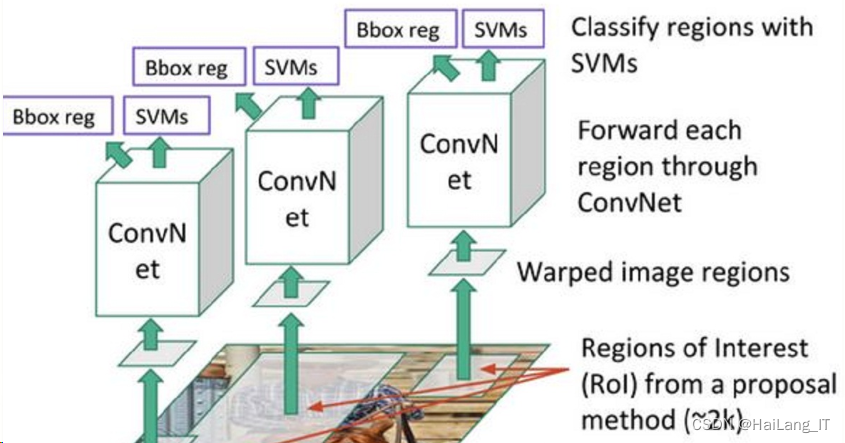
目标检测包含物体识别和物体定位两个任务, 其深度学习模型可以分为两类 : 第 一 类是Two-Stage( 两步 ) 形式 , 将物体识别和物体定位分为两个步骤, 以结合区域候选的卷积神经网络 ( Region Convolutional Neural Networks , R-CNN ) 、 快速 R-CNN ( fast R-CNN ) 、 更快 R-CNN ( fasterR-CNN) 为典型代表,优点是 误检率低、漏检率低,缺点是运算速度慢,不适用于街景的大数据量。
R-CNN的全称是Region-CNN,是第一个成功将深度学习应用到目标检测上的算法。R-CNN基于
卷积神经网络(CNN),线性回归,和
支持向量机(SVM)等算法,实现目标检测技术。
另一类是 One-Stage( 一步) 形式,以 YOLO 系列、单向多框探测器( Single Shot MultiBox Detec-tor,SSD) 等为典型代表,将物体分类和物体定位在一个步骤中完成,识别速度非常快,准确率也能接近 faster R-CNN 的水平。
二、试验与分析
数据采集
利用 SSW 移动测量车 搭载全景相机 、 GNSS 接收机 、 惯性测量单元等传感器 , 在城区采 集街景影像, 取出典型区域的 500 张进行数据测试。

目标检测
使用 Visual Studio 2017 作为开发 工具, C + + 作为编程语言 , OpenCV 4. 4 作为图像引擎, YOLO v4 作为检测模型 。 硬件环境为ThinkStation P520W 图形工作站 , 配备了大容量内存、 固态硬盘 、 高性能显卡 、 多核中央处理器 。 OpenCV 读取街景影像后 , 将有效区域的 8 个图像块抠出, 如图:

利用 8 核并行处理 , 进一步提高 YOLO v4 检测速度。 如图 所示 , 从分块 3 的检测结果可以看出, 三个行人 ( 男人 、 女人 、 小孩 ) 均检测出来 , 三辆车( 轿车 、 SUV 、 面包车 ) 均检测出来 , 只有一个人蹲在汽车后面, 拍到的部分太少 , 漏检了 。从分块 6 的结果可以看出 , 两个骑车的行人均检测出来, 一辆轿车也检测出来 , 位置 、 数量 、 类别完全正确。
实现效果图样例
基于街景影像抓拍行人闯红灯人像:

我是海浪学长,创作不易,欢迎点赞、关注、收藏、留言。
毕设帮助,疑难解答,欢迎打扰!
最后



 0
0 0
0


 已为社区贡献133条内容
已为社区贡献133条内容

所有评论(0)