
基于电鱼 ARM 核心板的 AGV / AMR 搬运机器人控制方案——高性能嵌入式平台实现导航控制与通讯协调
💡 电鱼 ARM 核心板在保持低功耗的同时,具备强大的边缘计算能力,RK3588 平台支持毫秒级运算,保证AGV路径平滑与安全。可在车载环境中长期稳定运行,支持毫秒级路径规划与实时通讯。:支持CAN、RS485、Ethernet等现场总线;支持Wi-Fi / 4G / 5G模块 / 摄像头。高算力AI推理、SLAM优化、路径规划加速。:6 TOPS NPU支持本地AI推理;:支持OTA更新与Do
一、行业痛点
在AGV/AMR项目实施中,常见的技术挑战包括:
- 🧭 导航精度低、响应慢:计算资源不足导致路径规划延迟;
- ⚙️ 多传感器融合复杂:激光雷达、IMU、超声波等接口不统一;
- 📡 无线通讯不稳定:Wi-Fi、4G、CAN、RS485 等协议混用;
- 🔋 功耗高、续航差:传统x86控制单元功耗高达50W以上;
- 🧱 系统维护困难:软件更新需人工接入、调试繁琐。
✅ 解决思路:
使用 电鱼 ARM 核心板 作为AGV/AMR的导航与通信节点,
集成 激光雷达SLAM导航 + 多传感器融合 + 路径规划 + 通信协调,
实现边缘AI智能决策 + 云端集中调度的整体控制方案。
二、核心硬件平台
|
参数 |
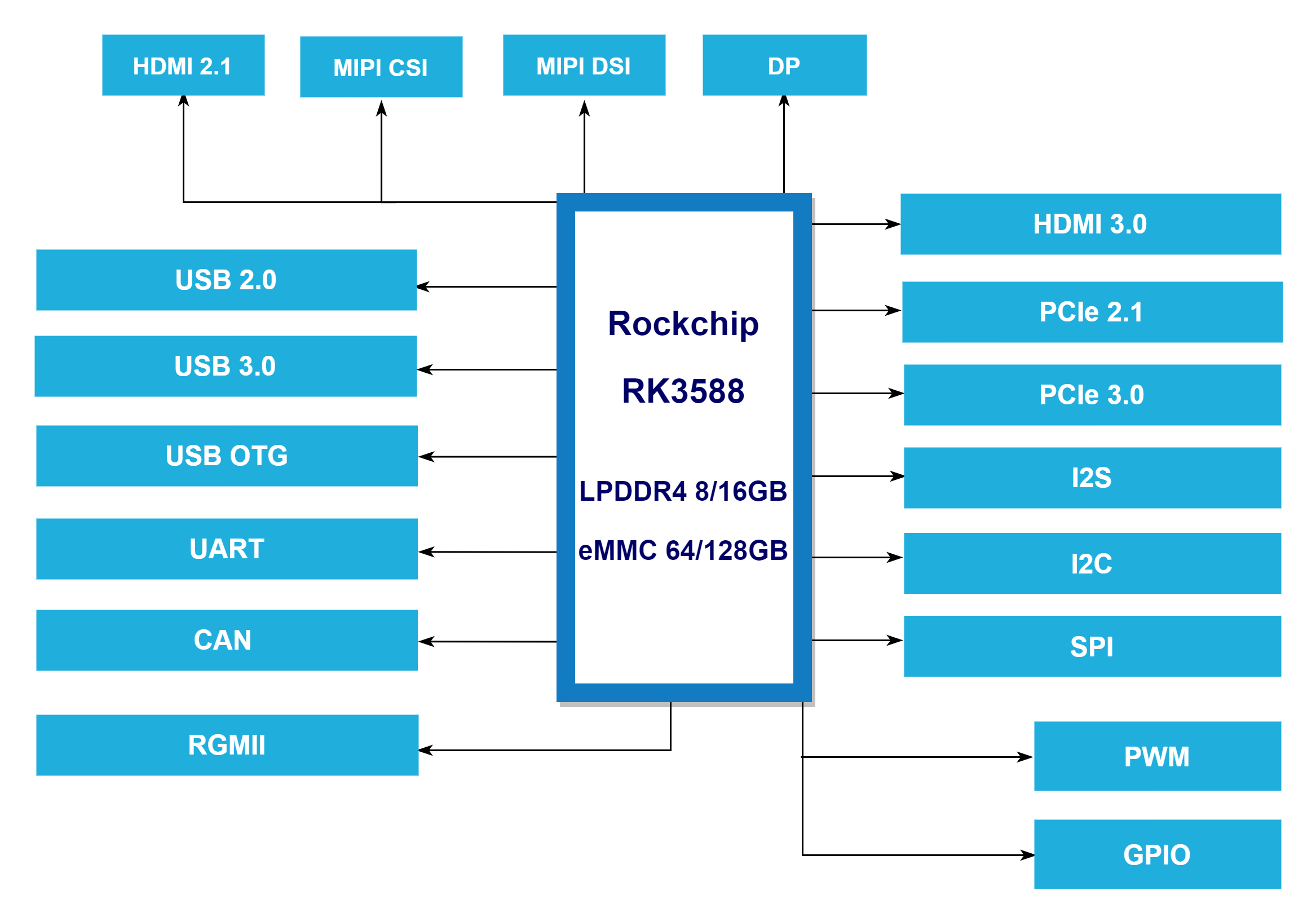
电鱼 EFISH-RK3588 核心板 |
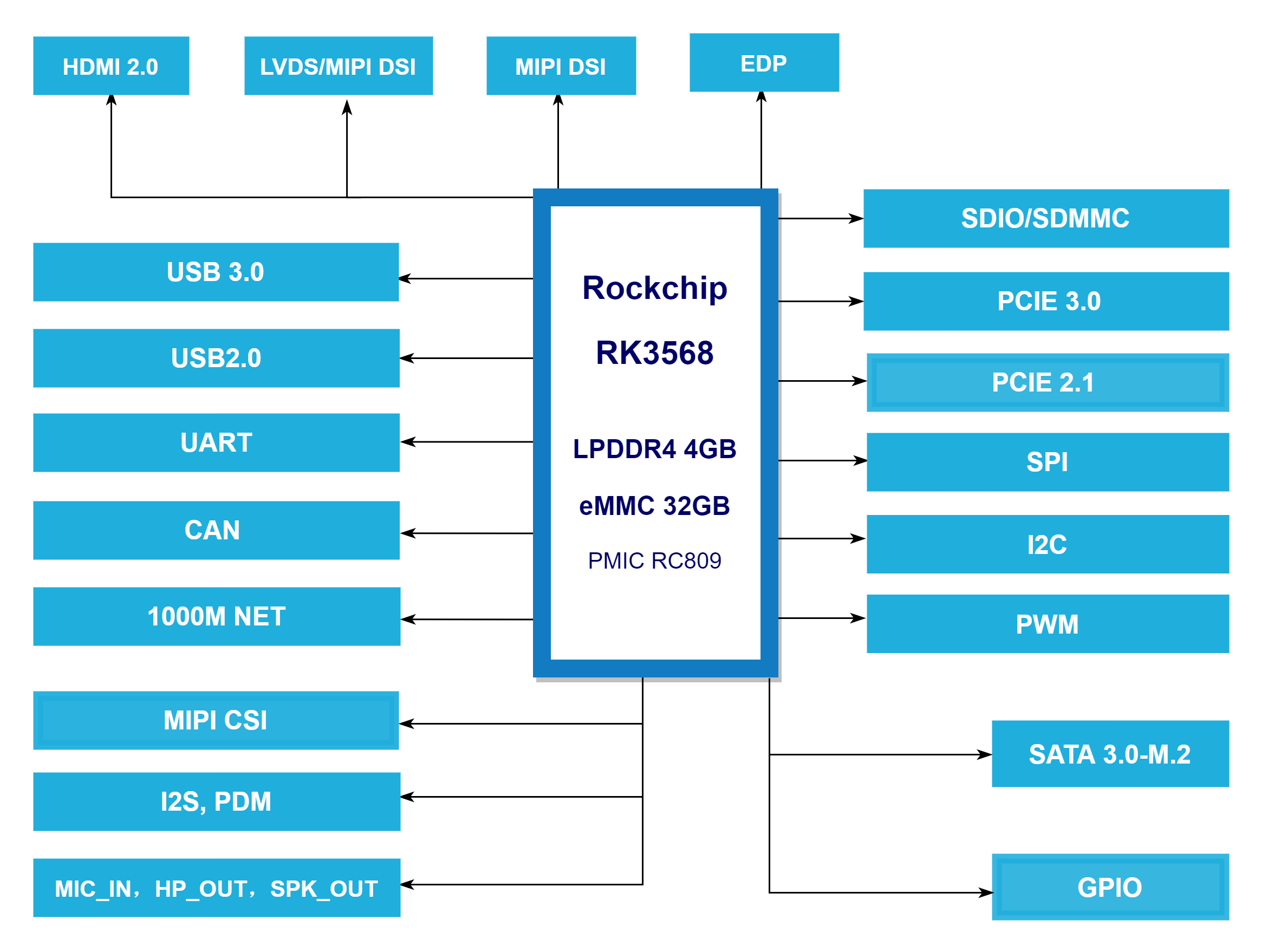
电鱼 EFISH-RK3568 核心板 |
|
CPU |
8核 Cortex-A76 + A55 |
4核 Cortex-A55 |
|
NPU算力 |
6 TOPS |
1 TOPS |
|
GPU |
Mali-G610 |
Mali-G52 |
|
接口 |
UART×6 / CAN×2 / SPI / I2C / GPIO / Ethernet / MIPI |
同上 |
|
系统 |
Linux 5.10 / Ubuntu 20.04 |
Linux 5.10 / Debian |
|
功耗 |
< 15W |
< 10W |
|
扩展 |
支持Wi-Fi / 4G / 5G模块 / 摄像头 |
同上 |
|
特点 |
高算力AI推理、SLAM优化、路径规划加速 |
稳定低功耗、灵活嵌入式设计 |
💡 电鱼 ARM 核心板在保持低功耗的同时,具备强大的边缘计算能力,
可在车载环境中长期稳定运行,支持毫秒级路径规划与实时通讯。
三、系统功能模块
|
模块 |
功能描述 |
技术实现 |
|
SLAM导航模块 |
同时定位与建图(LIDAR+IMU) |
Cartographer / RTAB-Map |
|
路径规划模块 |
动态路径规划与避障 |
A* / DWA / RRT算法 |
|
运动控制模块 |
驱动电机控制与姿态反馈 |
CANopen / PWM控制 |
|
通信协调模块 |
与调度系统实时交互 |
MQTT / WebSocket |
|
AI识别模块 |
识别行人、障碍物 |
YOLOv8 + TensorRT |
|
任务调度模块 |
多车任务协同 |
ROS 2 / MQTT |
|
远程管理模块 |
OTA升级 / 日志回传 |
Docker + HTTP API |
四、导航与控制示例
SLAM导航算法(Python伪代码)
import slam, lidar, imu
map_data = slam.init_map()
while True:
lidar_scan = lidar.get_scan()
imu_data = imu.get_orientation()
pose = slam.update_pose(lidar_scan, imu_data)
map_data = slam.update_map(pose)
print("Current position:", pose)
💡 通过ARM核心板本地运行SLAM算法,可实现厘米级定位精度。路径规划逻辑(A*算法简例)
def a_star(start, goal, grid):
open_list = [start]
g_cost = {start: 0}
came_from = {}
while open_list:
node = min(open_list, key=lambda n: g_cost[n])
if node == goal:
return reconstruct_path(came_from, node)
open_list.remove(node)
for neighbor in get_neighbors(node, grid):
cost = g_cost[node] + distance(node, neighbor)
if neighbor not in g_cost or cost < g_cost[neighbor]:
came_from[neighbor] = node
g_cost[neighbor] = cost
open_list.append(neighbor)⚙️ 路径规划可结合障碍物动态数据进行实时更新,
RK3588 平台支持毫秒级运算,保证AGV路径平滑与安全。
五、方案优势
✅ 高性能边缘计算:6 TOPS NPU支持本地AI推理;
✅ 多协议兼容:支持CAN、RS485、Ethernet等现场总线;
✅ 低功耗长续航:适用于车载电池系统;
✅ 实时路径规划:支持SLAM与动态避障算法;
✅ 多车协同通信:MQTT实现云端统一调度;
✅ 远程运维便捷:支持OTA更新与Docker部署;
✅ 工业级可靠性:宽温运行,抗震抗干扰设计。
六、典型应用场景
- 🏭 工厂车间智能搬运机器人(AGV / AMR)
- 🚚 物流仓储自动配送系统
- 📦 自动化立体仓库出入库机器人
- 🧱 SMT/生产线物料搬运系统
- 🚗 园区配送与巡检机器人

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)