
深入探究FreeRTOS V7.01:轻量级嵌入式实时操作系统
FreeRTOS是一款流行的开源实时操作系统(RTOS),广泛应用于嵌入式系统中。V7.01版本作为其中的一个稳定分支,集成了许多先进的功能,适合需要高度可靠性和实时性能的项目。实时操作系统与传统的操作系统的主要区别在于其调度策略的设计,后者更注重于资源的公平分配和系统的总体吞吐量,而前者则侧重于任务的实时性和确定性。实时调度策略可以分为两类:静态调度(Static Scheduling):在系统

简介:FreeRTOS V7.01是一个针对资源有限的嵌入式系统设计的轻量级、开源实时操作系统。该版本提供了一系列关键功能,包括高度优化的调度算法、多任务管理、同步机制(信号量和互斥量)、任务间通信(队列通信)、软件定时器、内存管理、硬件抽象层、开发工具支持、源码开放性以及丰富的社区和文档资源。新版本可能包含了错误修复、性能提升和新功能,详情可查看相关文档。 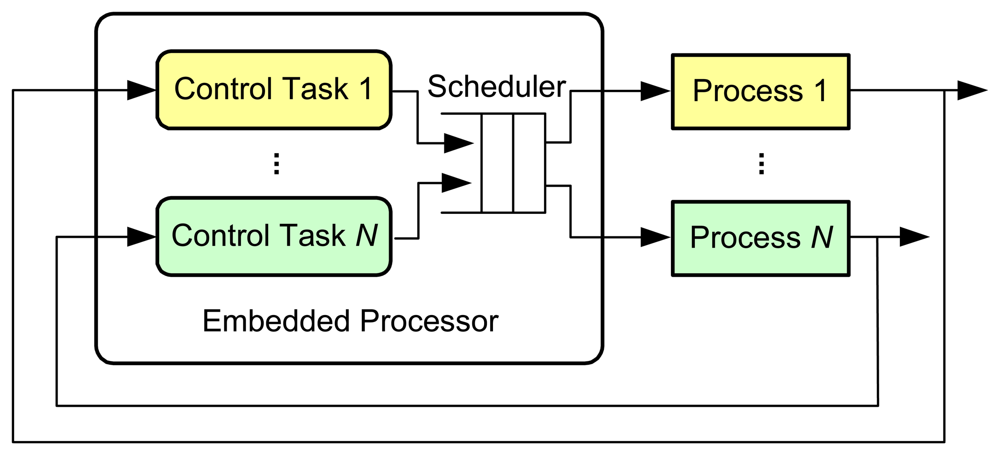
1. FreeRTOS V7.01 实时操作系统特性解析
简介
FreeRTOS是一款流行的开源实时操作系统(RTOS),广泛应用于嵌入式系统中。V7.01版本作为其中的一个稳定分支,集成了许多先进的功能,适合需要高度可靠性和实时性能的项目。
核心特性
实时性
FreeRTOS的实时性能是其核心优势之一。它能够保证任务在规定时间内得到及时处理,这对于那些对响应时间要求严格的系统来说至关重要。
资源占用小
相比其他操作系统,FreeRTOS具有非常小的内存占用,即使在资源受限的嵌入式设备中,也能运行自如。这一特性使得FreeRTOS非常适合用于物联网(IoT)、可穿戴设备等领域。
高度可配置
FreeRTOS提供了丰富的配置选项,允许开发者根据实际需求进行裁剪,从而优化内存使用和提高系统性能。
通过这些核心特性的讨论,我们将展开对FreeRTOS V7.01的全面了解。在接下来的章节中,我们将深入探讨FreeRTOS的任务调度机制、多任务并发管理、同步与通信机制、内存与硬件抽象层,以及开发工具和社区支持等方面。
2. FreeRTOS高效的任务调度机制
任务调度是实时操作系统(RTOS)的核心功能之一,它负责管理任务的执行顺序和时间,以满足实时性的要求。FreeRTOS的调度器是其核心特性之一,它通过一系列的调度算法来保证任务能够高效、公平地运行。
2.1 任务调度理论基础
2.1.1 实时操作系统调度策略概述
实时操作系统与传统的操作系统的主要区别在于其调度策略的设计,后者更注重于资源的公平分配和系统的总体吞吐量,而前者则侧重于任务的实时性和确定性。
实时调度策略可以分为两类:
- 静态调度(Static Scheduling):在系统启动之前,系统中所有任务的执行顺序和时间就已经确定。
- 动态调度(Dynamic Scheduling):任务的调度和执行顺序由运行时的信息动态决定。
FreeRTOS的调度器设计为动态调度器,通过运行时的数据(如任务优先级、系统时钟、任务状态等)来动态地调度任务。
2.1.2 FreeRTOS的调度器核心概念
FreeRTOS的调度器是基于优先级的,它使用了抢占式调度策略,允许系统中优先级高的任务抢占正在运行的低优先级任务。为了进一步增强系统的实时性,FreeRTOS还提供了一种时间片轮转机制,即在多个相同优先级的任务间进行公平的时间分配。
FreeRTOS中的几个核心概念包括:
- 任务优先级(Task Priority):FreeRTOS使用数字表示优先级,数字越小,优先级越高。
- 时间片(Time Slice):在时间片轮转调度中,每个任务在被抢占前允许运行的时间长度。
- 上下文切换(Context Switching):指在一个任务运行结束后,操作系统保存当前任务的状态,并加载另一个任务状态的过程。
2.2 任务调度算法实践
2.2.1 优先级调度算法的应用与优化
优先级调度是FreeRTOS中最基本的调度算法。系统会始终选择就绪态中优先级最高的任务来运行。当一个新的任务被创建时,如果其优先级高于正在运行的任务,它将立刻抢占当前任务。
优化优先级调度的关键在于合理设置任务的优先级。对于具有实时性要求的任务,应赋予较高的优先级。在设计系统时,开发者还应注意避免优先级反转(Priority Inversion)和优先级天花板协议(Priority Ceiling Protocol)的问题。
2.2.2 时间片轮转调度的实现
时间片轮转调度是当有多个任务具有相同的最高优先级时,调度器通过给每个任务分配固定的时间片来实现任务的轮转。在FreeRTOS中,时间片的长度可以被配置,也可以使用默认值。
具体实现中,任务调度器需要维护一个时间片计数器,当任务在时间片结束前没有主动放弃CPU或者阻塞,调度器将强制进行上下文切换,以确保其他相同优先级的任务有执行的机会。
2.2.3 混合调度策略分析
FreeRTOS支持多种调度策略的混合使用,例如,高优先级任务采用抢占式调度,而相同优先级任务间采用时间片轮转。这种混合策略允许开发者根据不同任务的需求灵活选择最合适的调度方式。
在混合调度策略下,开发者需要仔细设计任务的优先级和时间片分配,以避免过度调度导致的系统开销过大,同时确保关键任务可以及时得到执行。
实际案例分析
为了更深入理解FreeRTOS的任务调度,可以考虑以下案例:
- 任务优先级设计 :如果有一个传感器数据读取任务,一个数据处理任务,和一个UI更新任务,我们应如何设计它们的优先级以确保系统的实时性?
- 时间片轮转的场景 :假设三个相同的任务同时就绪,我们如何配置时间片,才能保证系统响应的实时性?
- 混合调度 :在有一个关键任务需要经常响应,以及多个较低优先级任务的情况下,我们应该如何设计调度策略?
通过这些案例的分析,开发者可以掌握如何在实际项目中灵活使用FreeRTOS的调度策略,以满足不同场景下的实时性需求。
3. FreeRTOS多任务并发管理
在多核处理器和多任务操作系统中,任务管理是确保资源合理分配和高效运行的关键。FreeRTOS作为一个广泛使用的实时操作系统,提供了灵活的任务管理机制,这对于开发高性能、低延迟的应用程序至关重要。本章节将深入探讨FreeRTOS的多任务并发管理机制,以及如何在实践中加以应用和优化。
3.1 多任务并发理论
3.1.1 并发控制的基本原理
在操作系统领域,任务的并发执行是指系统中多个任务能够同时(或者在感觉上是同时)执行,尽管在单核处理器中,这种同时性是通过时间片轮转(Round Robin)来实现的,即操作系统会在极短的时间内轮换不同的任务来运行,给用户造成所有任务都在同时运行的错觉。多任务并发管理是通过任务调度器来完成的,它负责决定哪个任务应该运行,以及如何在多个任务之间合理分配处理器时间。
并发控制机制对于避免数据竞争和保持任务间同步至关重要。数据竞争是指当两个或多个任务同时访问同一资源时,且至少有一个任务在执行写操作,从而导致数据的不一致性。为了控制并发,操作系统通常提供了锁机制(如互斥量)、信号量、事件标志等同步机制,以及消息队列、邮箱等通信机制。
3.1.2 FreeRTOS对并发的支持特性
FreeRTOS提供了丰富的API来支持任务的并发执行和管理。FreeRTOS的任务调度器是基于优先级的抢占式调度器,它能够确保最高优先级的任务首先执行。任务创建、删除、挂起以及恢复等操作在FreeRTOS中都得到了很好的支持和优化。FreeRTOS还支持时间片轮转调度,以确保低优先级任务也有机会获得处理器时间。此外,FreeRTOS还提供了一系列同步和通信机制,如信号量、互斥量、消息队列等,允许任务之间进行有效协作。
3.2 多任务并发管理实践
3.2.1 任务创建与删除的最佳实践
在FreeRTOS中,任务的创建是通过调用 xTaskCreate() 函数完成的,而任务的删除则是通过 vTaskDelete() 函数实现。创建任务时,需要指定任务的入口函数、堆栈大小、优先级、任务句柄以及其他可选参数。例如:
void vTaskCode( void * pvParameters ) {
// 任务运行代码
}
int main( void ) {
// 创建任务
xTaskCreate(
vTaskCode, /* 任务函数 */
"Task 1", /* 任务名称 */
128, /* 堆栈大小 */
NULL, /* 参数传递给任务 */
1, /* 优先级 */
NULL /* 任务句柄 */
);
// 其他任务和调度器启动代码
}
最佳实践包括:
- 尽可能避免频繁创建和删除任务,因为这会增加系统的开销和降低效率。
- 为任务分配适当的堆栈大小,避免溢出或浪费内存资源。
- 使用任务句柄可以更方便地进行任务之间的通信和同步。
3.2.2 任务优先级管理策略
FreeRTOS使用了固定优先级的调度策略,这意味着每个任务都被分配了一个唯一的优先级值,调度器根据优先级值来决定任务的执行顺序。在实际应用中,合理地分配任务优先级是非常重要的。过高或过低的优先级都可能导致系统的性能问题,如死锁或饥饿。
任务优先级管理策略通常包括:
- 确保最高优先级的任务是关键任务,并且有足够的时间片来满足实时性需求。
- 使用优先级反转保护机制(如优先级继承协议)来保护高优先级任务不被低优先级任务阻塞。
- 使用优先级分配策略避免优先级反转,例如,使用优先级天花板协议。
3.2.3 任务间通信与同步机制
为了保证多任务之间的协调工作,FreeRTOS提供了一系列的同步机制,包括二进制信号量、计数信号量、互斥量、事件组以及消息队列。
信号量用于任务间的同步和互斥,例如:
SemaphoreHandle_t xSemaphore;
void vATask( void * pvParameters ) {
// 获取信号量
xSemaphoreTake( xSemaphore, portMAX_DELAY );
// 执行关键部分代码
xSemaphoreGive( xSemaphore );
}
void vAnotherTask( void * pvParameters ) {
// 创建信号量
xSemaphore = xSemaphoreCreateBinary();
if( xSemaphore != NULL ) {
// 启动任务
xTaskCreate( vATask, "Task A", 128, NULL, 1, NULL );
}
}
事件组和消息队列则用于实现任务间的数据通信和事件通知。合理使用这些同步机制对于避免死锁、优先级反转等问题至关重要,并且能够确保系统的稳定性和实时性。
总结
本章深入探讨了FreeRTOS在多任务并发管理方面的理论和实践。我们从并发控制的基本原理讲起,逐步深入到FreeRTOS的具体实现,包括任务的创建与删除、任务优先级管理以及任务间的通信与同步机制。通过本章节的介绍,读者应该能够更好地理解和应用FreeRTOS的多任务并发管理机制,从而设计出既高效又稳定的实时系统。
4. FreeRTOS同步与通信机制
在多任务并发的环境中,任务之间需要有效的同步和通信机制来确保数据的一致性和协调性。FreeRTOS提供了多种同步机制,包括信号量、互斥量以及队列通信,它们是实现任务同步与通信的关键组件。本章将深入探讨这些机制的理论基础以及在FreeRTOS环境中的应用实践。
4.1 信号量与互斥量机制
4.1.1 信号量与互斥量的基本概念
信号量是一种用于多任务环境中的同步工具,用于控制对共享资源的访问。在FreeRTOS中,信号量通常用于任务之间的同步,例如,一个任务等待另一个任务完成某项工作后再继续执行。
互斥量(Mutex)是一种特殊的二进制信号量,用于在任务之间提供互斥访问。它们通常用于保护共享资源,确保在任何时候只有一个任务可以访问该资源。互斥量与二进制信号量的主要区别在于互斥量具有优先级继承特性,这意味着在高优先级任务等待低优先级任务持有的互斥量时,低优先级任务的优先级会临时提升到高优先级任务的优先级,以防止优先级反转问题。
4.1.2 同步机制在任务管理中的应用
在FreeRTOS中,信号量和互斥量可以通过一系列API调用来创建和管理。例如, xSemaphoreCreateBinary() 可以创建一个二进制信号量,而 xSemaphoreCreateMutex() 则创建一个互斥量。
在任务管理中,这些同步机制可以用来:
- 控制对共享资源的访问,避免竞争条件。
- 协调任务之间的执行顺序,例如,一个任务等待信号量释放后才执行。
- 实现互斥访问,以确保数据的完整性和一致性。
下面是一个简单的信号量创建和使用示例:
SemaphoreHandle_t xSemaphore;
void vATaskFunction( void * pvParameters )
{
// 创建一个二进制信号量
xSemaphore = xSemaphoreCreateBinary();
// 检查信号量是否创建成功
if( xSemaphore != NULL )
{
// 其他任务管理代码...
}
}
void vAnotherTaskFunction( void * pvParameters )
{
// 等待信号量
if( xSemaphoreTake( xSemaphore, portMAX_DELAY ) == pdTRUE )
{
// 该任务可以安全地访问共享资源
}
}
在这个例子中, vATaskFunction 函数创建了一个信号量,并且 vAnotherTaskFunction 函数等待该信号量。只有当信号量可用时, vAnotherTaskFunction 中的代码才会执行。
4.2 队列通信机制
4.2.1 队列的基本操作与原理
队列是一种先进先出(FIFO)的数据结构,用于在任务和中断服务例程(ISR)之间传递数据。队列可以存储固定数量的数据项,每个数据项可以是任意大小。
在FreeRTOS中,队列不仅可以用来传递数据,还可以用来同步任务。例如,一个任务可以将数据项发送到队列,并且阻塞等待,直到另一个任务从队列中检索该数据项。队列的这种特性使得它们在任务间通信和同步中非常有用。
队列操作API包括创建队列、发送数据到队列、从队列中接收数据等。下面是一个队列使用的基本示例:
QueueHandle_t xQueue;
void vATaskFunction( void * pvParameters )
{
int32_t lReceivedValue;
// 创建一个可以存储10个整数的队列
xQueue = xQueueCreate( 10, sizeof( int32_t ) );
// 确保队列创建成功
if( xQueue != NULL )
{
// 其他任务代码...
}
}
void vAnotherTaskFunction( void * pvParameters )
{
// 发送数据到队列
if( xQueueSend( xQueue, ( void * )&lValue, ( portTickType )0 ) == pdPASS )
{
// 发送成功
}
}
在这个例子中, vATaskFunction 创建了一个队列,并且 vAnotherTaskFunction 尝试发送一个整数值到这个队列中。
4.2.2 实例分析:队列在数据交换中的作用
假设我们有两个任务:一个是生产者任务,负责读取传感器数据;另一个是消费者任务,负责处理这些数据。在这种情况下,队列可以作为一种高效的通信机制。
生产者任务将数据项发送到队列,消费者任务从队列中检索数据项。由于队列是阻塞的,如果消费者尝试读取一个空队列,它将阻塞直到生产者再次发送数据项。这样可以保证消费者总是处理最新的数据,并且不会有数据丢失。
#define DATA_QUEUE_LENGTH 10
QueueHandle_t xDataQueue;
void vProducerTask( void * pvParameters )
{
int32_t lSensorValue;
for( ;; )
{
// 读取传感器数据
lSensorValue = readSensor();
// 发送数据到队列
if( xQueueSend( xDataQueue, ( void * )&lSensorValue, ( portTickType )0 ) != pdPASS )
{
// 队列满了,处理错误
}
}
}
void vConsumerTask( void * pvParameters )
{
int32_t lReceivedValue;
for( ;; )
{
// 从队列接收数据
if( xQueueReceive( xDataQueue, ( void * )&lReceivedValue, ( portTickType )portMAX_DELAY ) == pdPASS )
{
// 处理接收到的数据
}
}
}
void main( void )
{
// 创建数据队列
xDataQueue = xQueueCreate( DATA_QUEUE_LENGTH, sizeof( int32_t ) );
// 创建并启动生产者和消费者任务...
}
在这个示例中, vProducerTask 负责读取传感器数据并将其发送到 xDataQueue 队列,而 vConsumerTask 不断从队列中读取数据并进行处理。通过队列,这两个任务可以有效地同步和通信,而无需直接相互知道对方的存在。
通过上述内容,我们了解了FreeRTOS中信号量与互斥量以及队列通信机制的理论与实践应用。这些同步与通信机制是实现复杂嵌入式系统任务管理和数据共享的关键组件。
5. FreeRTOS的内存与硬件抽象层
5.1 内存管理策略
内存管理在嵌入式系统中扮演着至关重要的角色。实时操作系统(RTOS)如FreeRTOS必须高效地处理有限的内存资源,同时确保系统的实时性能不受影响。内存管理的目标是尽量减少碎片,优化内存的分配和释放,以及提供可靠且可预测的内存使用模式。
5.1.1 内存管理的目标与挑战
内存碎片化是嵌入式系统开发者面临的最大挑战之一。不连续的内存分配可能导致无法再利用的小块内存(碎片),从而影响系统的稳定性。FreeRTOS通过以下方法应对这些挑战:
- 静态内存分配 :推荐使用静态内存分配来减少碎片化问题。
- 动态内存管理 :如果静态分配不适用,FreeRTOS提供了自己的内存分配机制,如pvPortMalloc()和vPortFree()。
5.1.2 FreeRTOS内存管理策略与实践
在实际应用中,FreeRTOS允许开发者选择最适合自己项目的内存管理策略:
- 使用静态内存分配 :将任务堆栈和其他内存需求在编译时就分配好,确保运行时不会出现内存分配失败的情况。
- 使用FreeRTOS内建的动态内存管理函数 :在动态内存分配无法避免时,使用FreeRTOS提供的内存管理函数,这些函数通常比标准C库函数更适合实时系统。
一个示例代码片段展示了如何在FreeRTOS中使用静态内存分配创建任务:
// 声明一个静态内存区域用于任务堆栈
static StackType_t xTaskStack[configMINIMAL_STACK_SIZE];
// 定义任务函数
void vTaskCode(void * pvParameters)
{
// 任务代码
}
int main(void)
{
// 创建任务,使用静态内存
xTaskCreate(vTaskCode, "Task Name", configMINIMAL_STACK_SIZE, NULL, mainTASK_PRIORITY, NULL);
// 启动调度器
vTaskStartScheduler();
// 如果调度器启动失败,则会进入此分支
for(;;);
}
使用静态内存分配避免了动态内存分配可能带来的碎片化问题,并且由于内存分配在编译时已经确定,运行时的内存分配失败的可能性也大幅减少。
5.2 硬件抽象层特性与实践
硬件抽象层(HAL)位于RTOS和硬件平台之间,它将操作系统与硬件细节隔离开来,使得操作系统可以跨多种硬件平台运行,且对特定硬件的依赖最小化。
5.2.1 硬件抽象层的目的与设计要点
HAL的设计目的是为了简化移植过程,降低硬件兼容性对系统性能和稳定性的影响。设计HAL时,应遵循以下要点:
- 硬件无关性 :HAL应当隐藏硬件的细节,向上提供统一的接口。
- 易用性 :HAL的接口应设计得易于使用,减少开发者的负担。
- 性能优化 :HAL应当考虑效率,避免不必要的抽象层开销。
5.2.2 硬件兼容性对系统优化的影响
不同的硬件平台具有不同的特性,HAL可以帮助开发者利用这些特性来优化系统性能:
- 外设访问 :通过HAL可以更容易地访问硬件外设,并且可以针对特定硬件进行优化。
- 时钟管理 :HAL可提供对系统时钟的抽象访问,允许开发者编写与硬件无关的代码。
- 电源管理 :HAL层还可以处理与电源相关的操作,如睡眠模式管理,这对于低功耗应用非常重要。
综上所述,FreeRTOS的内存管理和硬件抽象层设计考虑了嵌入式系统的独特挑战,并提供了解决方案,以支持开发者在各种硬件上实现可靠和高效的实时系统。接下来,我们将探讨FreeRTOS的开发工具和社区支持,这对于开发者来说,同样是一个重要的资源。
简介:FreeRTOS V7.01是一个针对资源有限的嵌入式系统设计的轻量级、开源实时操作系统。该版本提供了一系列关键功能,包括高度优化的调度算法、多任务管理、同步机制(信号量和互斥量)、任务间通信(队列通信)、软件定时器、内存管理、硬件抽象层、开发工具支持、源码开放性以及丰富的社区和文档资源。新版本可能包含了错误修复、性能提升和新功能,详情可查看相关文档。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 18
18 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)