
vscode图形化远程调试嵌入式linux开发板程序
本文介绍了如何在VSCode中通过图形化界面远程调试嵌入式Linux开发板程序。主要步骤
vscode图形化远程调试嵌入式linux开发板程序
概要
嵌入式开发往往采用交叉编译,在自己主机编译好开发板所需的程序,然后上传到开发板进行执行观察效果,在开发阶段往往会采用加日志打印的方式进行调试执行,有些场景往往没有debug调试来的直接,在嵌入式设备上虽然可以使用gdb来调试程序,但开发板资源(CPU、内存)通常有限,直接运行 gdb 可能影响调试效率,调试时开发板还要复制源代码才能做到代码定位,往往比较麻烦。
以下讲解主机vscode图形界面 + 交叉编译工具链的gdb + 开发板 gdbserver 的远程调试方式。
- 开发板是sipeed公司的Maix-II-Dock(M2dock) M2dock
- 开发的示例程序为libmaix,这个是我从官方fork的项目,基于官方的项目在examples/camera示例目录下开发的视频监控项目作为远程调试的演示
- 主机使用的是windows下wsl子系统对开发板程序进行编译和远程调试
- 开发工具使用vscode远程连接到wsl子系统
- windows下安装usbipd工具,可以将开发板连接到windows系统产生的usb连接映射到wsl子系统中方便使用adb和开发板交互
整体架构流程
-
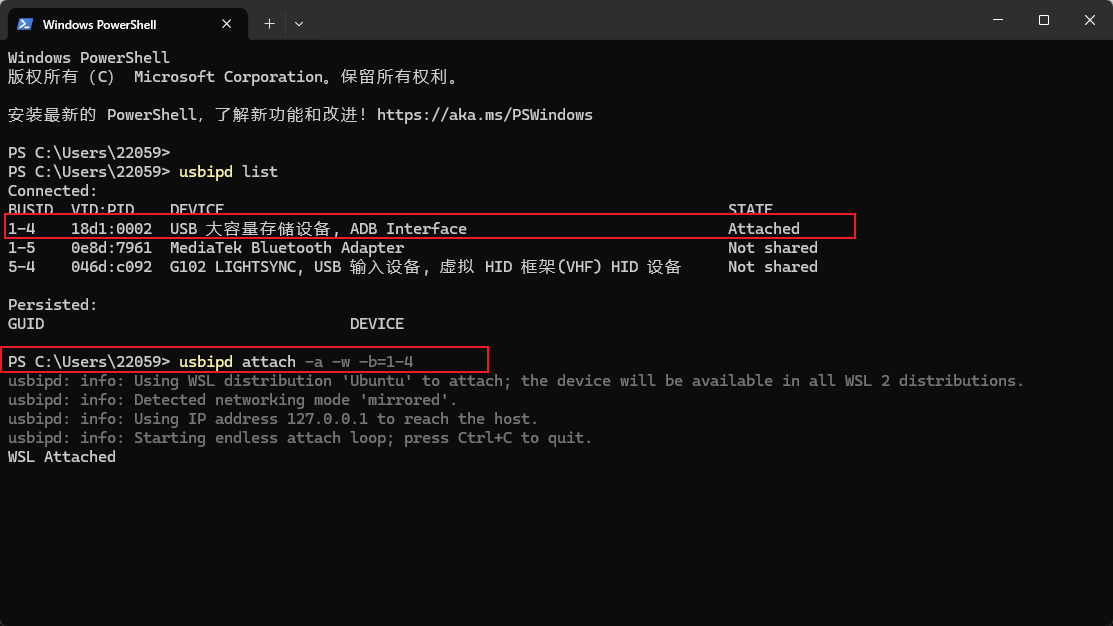
下载windows下安装usbipd工具,将开发板接入电脑usb口,先usbipd查看开版本对应的BUSID,我这里是1-4然后执行usbipd attach -a -w -b=1-4命令将usb口抓取到wsl子系统使用,执行完毕后在子系统中可以执行adb devices查看是否有显示相应的设备,后续可以直接使用adb push将程序推送到开发板,以及后续可以直接adb shell进入开发板的shell来操作开发板,如果自己的wsl子系统没有adb命令先用apt安装adb
-
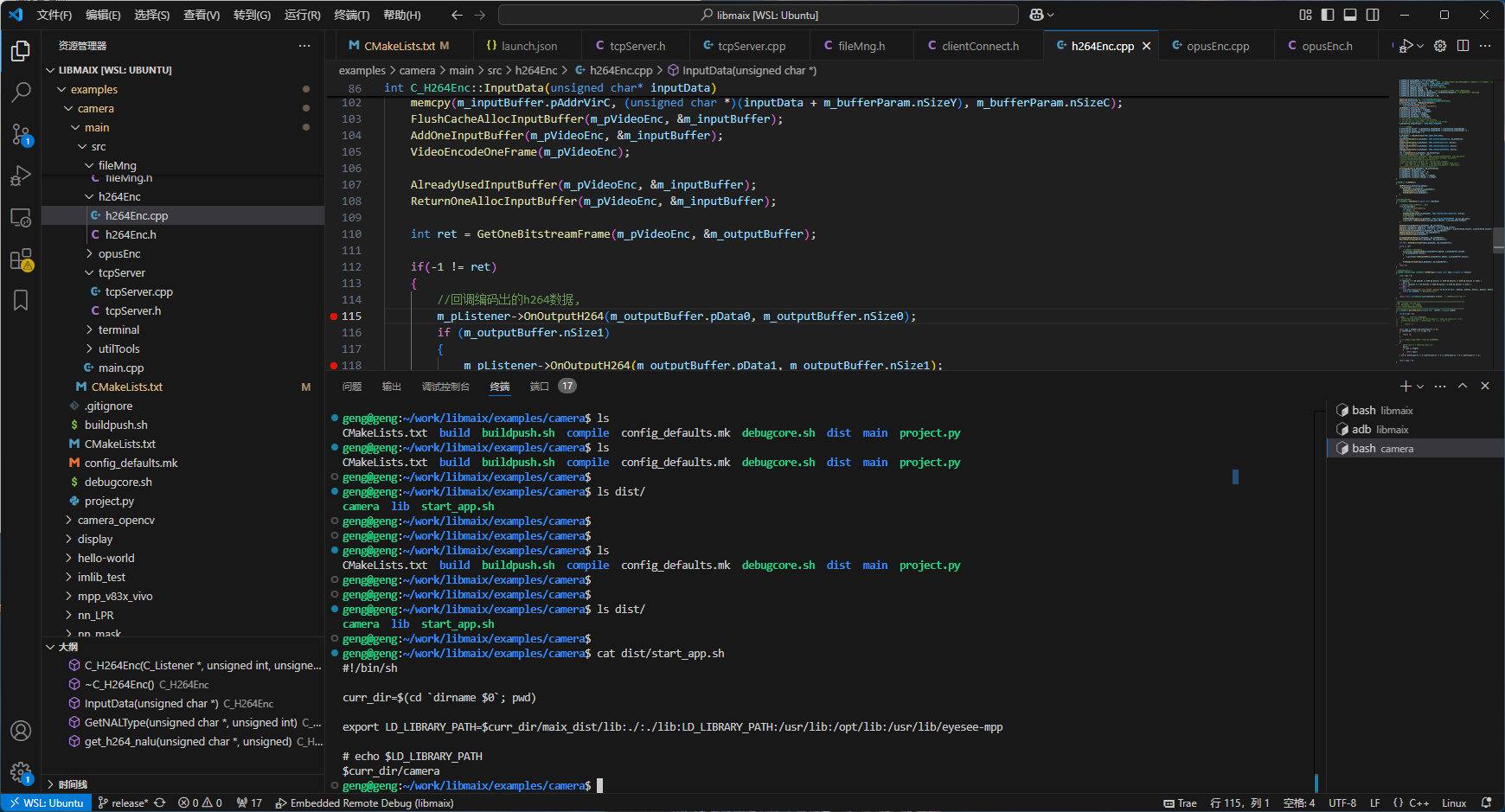
示例代码编译完成后会在dist目录下生成相关可执行程序、库、启动程序的脚本,正常情况下我们直接将dist目录下的所有程序都推送到开发板中,直接在开发板中执行./start_app.sh脚本程序就能正常运行了,但是正常编译的程序并不带有调试信息。
-
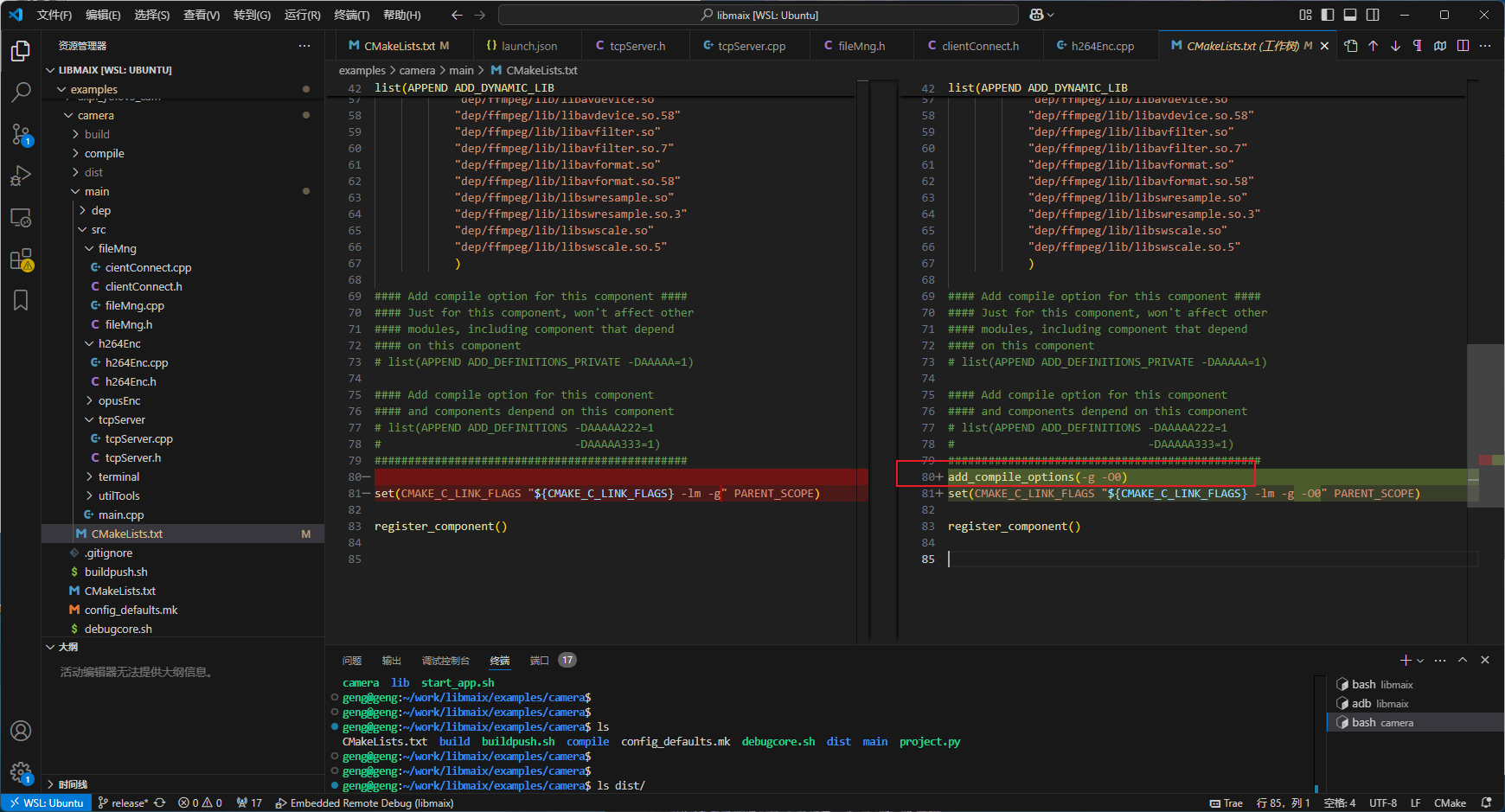
修改examples/camera目录下的CMakeLists.txt文件,增加带有调试信息的编译选择add_compile_options(-g -O0),然后再重新编译程序,把编译得到的带调试信息的程序通过adb push推送到开发板
-
使用交叉编译工具链编译能在开发板上运行的gdbserver
安装必要依赖(编译 gdb 所需的基础工具):
sudo apt update && sudo apt install -y wget tar bzip2 build-essential libgmp-dev libmpfr-dev libmpc-dev zlib1g-dev libexpat1-dev texinfo下载 gdb 源码
wget http://ftp.gnu.org/gnu/gdb/gdb-10.2.tar.xz
tar -xf gdb-10.2.tar.xz
cd gdb-10.2/确保交叉编译工具链已正确设置,并且路径已添加到系统 PATH 中。
export PATH=/opt/toolchain-sunxi-musl/toolchain/bin:$PATH
设置 STAGING_DIR 环境变量,OpenWrt 工具链通常需要这个变量:
export STAGING_DIR=/opt/toolchain-sunxi-musl手动指定头文件和库路径在编译时显式指定工具链的 include 和 lib 路径:
./configure
–host=arm-openwrt-linux-muslgnueabi
–prefix=$PWD/install
–disable-werror
CFLAGS=“-I/opt/toolchain-sunxi-musl/toolchain/arm-openwrt-linux-muslgnueabi/include”
LDFLAGS=“-L/opt/toolchain-sunxi-musl/toolchain/arm-openwrt-linux-muslgnueabi/lib”
CC=arm-openwrt-linux-muslgnueabi-gcc
CXX=arm-openwrt-linux-muslgnueabi-g++编译
make -j$(nproc)进入 gdbserver 目录
cd gdbserver
由于编译gdbserver需要依赖编译gdb生成的文件所以前面先编译gdb是必须的配置 gdbserver
使用与 GDB 相同的工具链配置,显式指定头文件和库路径:
./configure
–host=arm-openwrt-linux-muslgnueabi
–prefix=$PWD/install
CFLAGS=“-I/opt/toolchain-sunxi-musl/toolchain/arm-openwrt-linux-muslgnueabi/include”
LDFLAGS=“-L/opt/toolchain-sunxi-musl/toolchain/arm-openwrt-linux-muslgnueabi/lib”
CC=arm-openwrt-linux-muslgnueabi-gcc
CXX=arm-openwrt-linux-muslgnueabi-g++编译 gdbserver
make -j$(nproc)检查生成的 gdbserver
file gdbserver
正常输出应类似:
gdbserver: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV), dynamically linked, interpreter /lib/ld-musl-arm.so.1, not stripped使用adb push命令将gdbserver推送到和要调试的程序在相同目录下
adb push gdbserver /root/maix_dist/该交叉编译工具链编译所得的gdbserver我已经上传到github上了,如有需要可以自取
-
开发板使用gdbserver启动要调试的程序
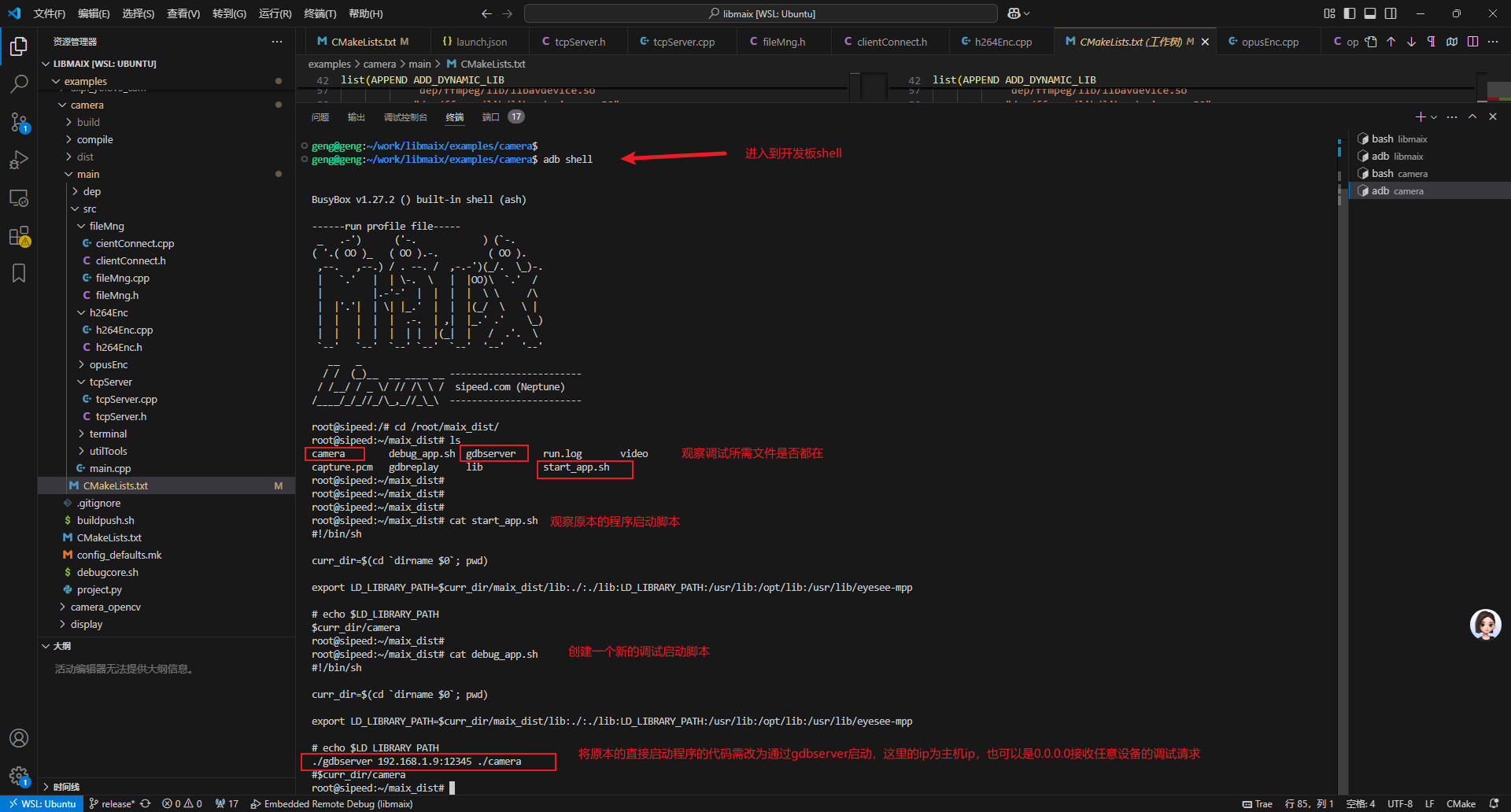
启动debug_app.sh脚本观察到以下打印说明启动正常
-
vscode配置launch.json来进行远程调试
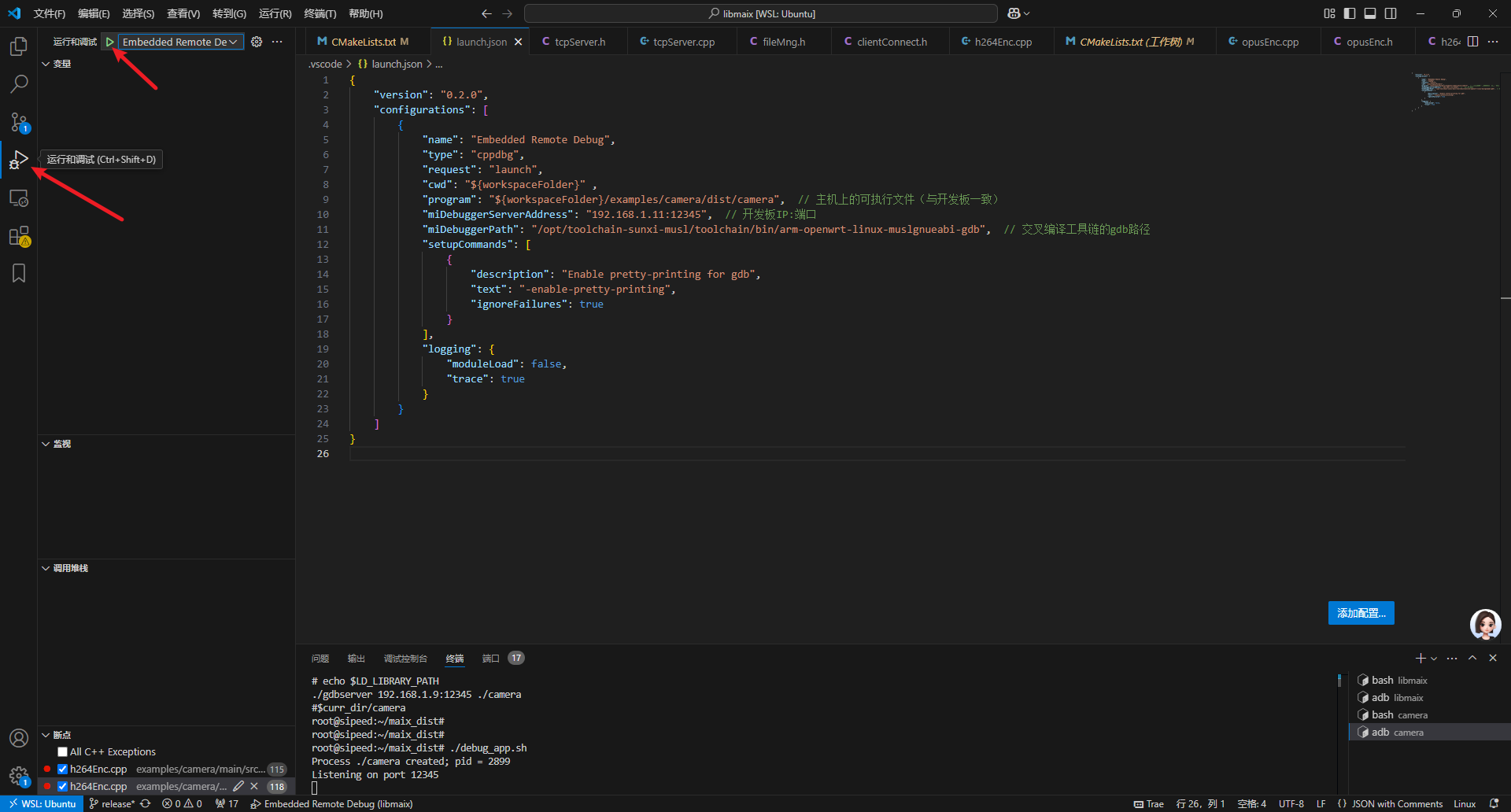
-
启动时可能会存在报错,这是因为wsl缺少libtinfo.so.5库
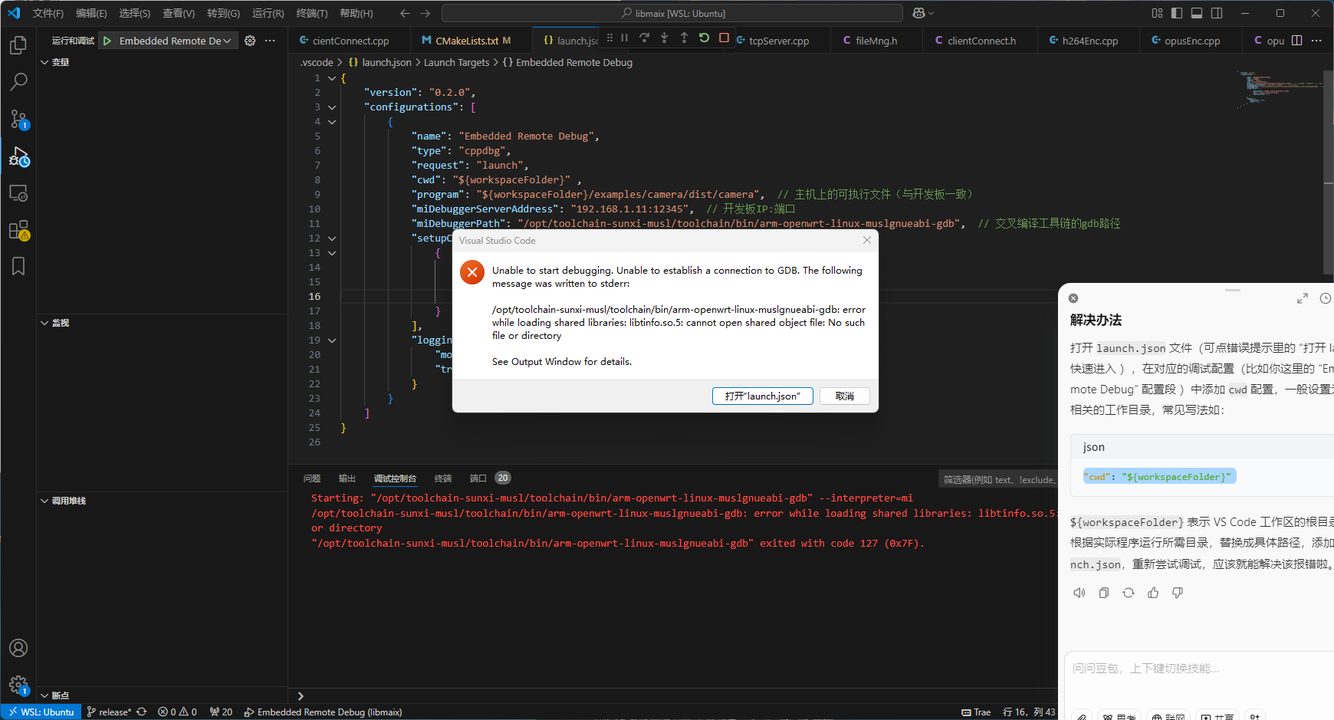
-
创建libtinfo.so.5软链接到libtinfo.so.6,我wsl本机内有libtinfo.so.6,如果没有可使apt进行安装
sudo ln -s /usr/lib/x86_64-linux-gnu/libtinfo.so.6 /usr/lib/x86_64-linux-gnu/libtinfo.so.5
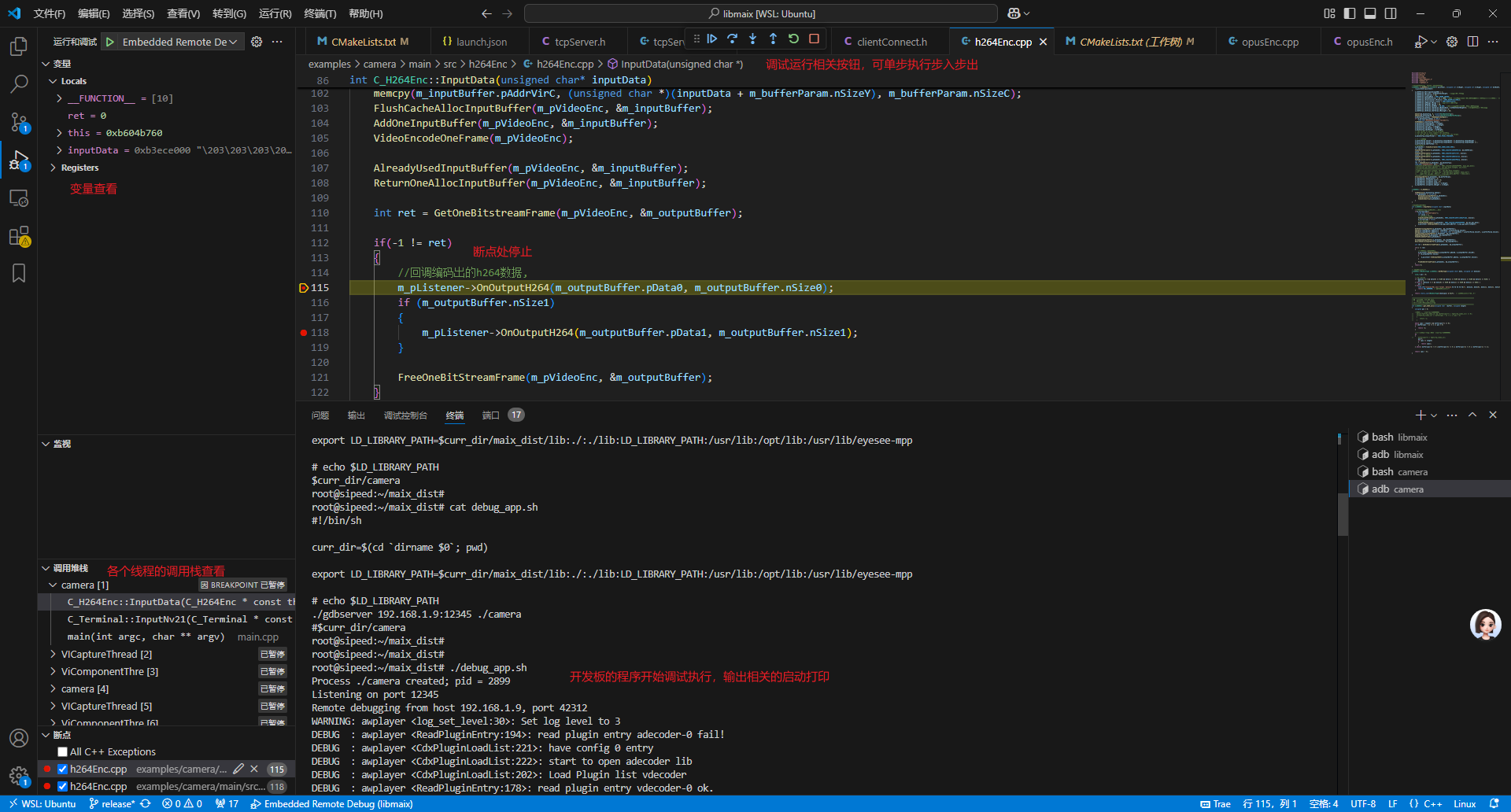
-
再次启动调试,程序正常被调试
小结
以上就是vscode图形化远程调试嵌入式linux开发板程序的整个过程,如有问题欢迎沟通交流

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 18
18 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)