
TI嵌入式开发工具链XDS510+CCS+Driver详解

简介:本文围绕TI(德州仪器)嵌入式开发中的核心工具链“XDS510+CCS+Driver”展开,介绍XDS510 JTAG调试器的功能与使用方式,Code Composer Studio(CCS)作为集成开发环境的全面功能,以及驱动程序在PC与目标硬件通信中的关键作用。通过这些工具的组合,开发者可以高效完成基于TI处理器的嵌入式系统设计、调试与优化。 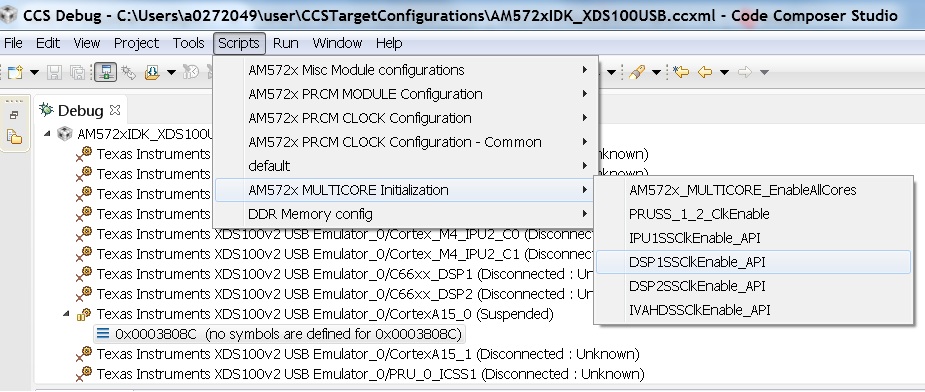
1. XDS510调试器功能概述
XDS510调试器是德州仪器(TI)推出的一款高性能、广泛兼容的JTAG调试接口设备,专为嵌入式系统的开发与调试设计。它支持多种TI处理器架构,包括C2000、C6000、ARM Cortex-M系列等,适用于从工业控制到数字信号处理的多种应用场景。
XDS510通过JTAG(联合测试行动组)接口与目标处理器通信,能够实现指令级调试、内存访问、寄存器读写、断点设置等功能。其硬件结构包括主控芯片、电平转换模块和USB通信接口,确保在不同电压平台下的稳定连接。同时,XDS510兼容TI的Code Composer Studio(CCS)开发环境,形成完整的软硬件调试体系,为开发者提供高效的调试体验。
2. JTAG接口调试机制解析
JTAG(Joint Test Action Group)是一种广泛应用于嵌入式系统中的标准化测试与调试接口。它最初由IEEE 1149.1标准定义,旨在为集成电路提供一种通用的边界扫描测试机制。随着嵌入式系统的发展,JTAG不仅被用于硬件测试,还成为调试器与目标处理器之间通信的核心接口。XDS510调试器正是通过JTAG接口与目标系统建立连接,实现对TI DSP、ARM等嵌入式处理器的调试功能。本章将深入解析JTAG接口的调试机制,包括其基本原理、连接方式、工作流程以及常见问题的解决方法,帮助开发者全面理解JTAG在嵌入式开发中的作用。
2.1 JTAG接口的基本原理
2.1.1 JTAG标准的发展历程
JTAG接口最早由IEEE于1990年正式发布为IEEE 1149.1标准,主要用于芯片级的边界扫描测试。其核心思想是通过在芯片内部嵌入边界扫描寄存器(Boundary Scan Register),使得测试人员可以在不依赖外部探针的情况下,对芯片引脚进行电气特性的检测。随着嵌入式系统的复杂化,JTAG逐渐被用于调试和编程,特别是在ARM和TI DSP等处理器中,成为调试器与目标处理器之间通信的标准接口。
随着技术的发展,IEEE又相继推出了多个扩展标准,例如:
- IEEE 1149.4:用于模拟电路测试;
- IEEE 1149.6:用于高速差分信号测试;
- IEEE 1149.7:增强型JTAG接口,支持更复杂的调试功能和更少的引脚。
这些标准的演进使得JTAG接口不仅适用于硬件测试,也成为嵌入式软件调试、芯片编程和系统级调试的重要手段。
2.1.2 TAP控制器与指令寄存器的作用
JTAG接口的核心组件包括TAP(Test Access Port)控制器和指令寄存器。TAP控制器是JTAG接口的状态机,负责控制整个JTAG通信过程。它包括多个状态,如“测试逻辑复位”、“运行/测试空闲”、“选择DR扫描”、“捕获DR”、“移位DR”、“退出1 DR”、“暂停DR”、“退出2 DR”、“更新DR”等。
TAP控制器的工作流程如下图所示(使用Mermaid绘制):
stateDiagram-v2
[*] --> TestLogicReset
TestLogicReset --> RunTestIdle
RunTestIdle --> SelectDRScan
SelectDRScan --> CaptureDR
CaptureDR --> ShiftDR
ShiftDR --> Exit1DR
Exit1DR --> PauseDR
PauseDR --> Exit2DR
Exit2DR --> UpdateDR
UpdateDR --> RunTestIdle
TAP控制器通过TCK(Test Clock)同步操作,TMS(Test Mode Select)决定状态转换,TDI(Test Data In)和TDO(Test Data Out)用于数据输入和输出。
指令寄存器(Instruction Register)则决定了当前JTAG通道的操作类型。例如,当指令寄存器被设置为“EXTEST”时,表示进行外部测试;设置为“IDCODE”时,用于读取设备的ID码;设置为“BYPASS”时,则绕过当前设备,将数据传递给下一个设备。在调试过程中,调试器通过发送特定的指令来控制目标处理器的行为,如读写寄存器、执行指令、设置断点等。
2.2 XDS510与JTAG的连接方式
2.2.1 标准JTAG引脚定义
XDS510调试器通过标准JTAG接口与目标系统连接,通常使用14针或20针的连接器。以下是一个典型的14针JTAG接口定义:
| 引脚号 | 信号名 | 功能描述 |
|---|---|---|
| 1 | VCC | 目标系统电源(通常为3.3V或5V) |
| 2 | TRST | 测试复位(可选) |
| 3 | TCK | 测试时钟 |
| 4 | TMS | 测试模式选择 |
| 5 | TDI | 测试数据输入 |
| 6 | TDO | 测试数据输出 |
| 7 | RTCK | 返回时钟(用于自适应时钟) |
| 8 | DBGRQ | 调试请求信号 |
| 9 | DBGACK | 调试确认信号 |
| 10 | N/C | 未连接 |
| 11 | N/C | 未连接 |
| 12 | GND | 地线 |
| 13 | GND | 地线 |
| 14 | GND | 地线 |
XDS510通过这些引脚与目标处理器的JTAG接口连接,建立起物理层通信。其中,TCK、TMS、TDI和TDO是JTAG通信的四个基本信号,TRST和RTCK则用于更复杂的调试场景。
2.2.2 不同处理器的适配方法
由于不同处理器厂商的JTAG接口定义可能略有不同,因此XDS510需要通过适配器或配置文件来适配不同型号的处理器。例如,TI的DSP处理器通常使用14针JTAG接口,而ARM Cortex-M系列可能使用20针或更少的引脚。
在实际连接中,XDS510通过其驱动程序加载对应的配置文件(通常为 .cdb 文件),自动识别目标处理器的JTAG接口定义,并配置相应的通信参数。以下是一个典型的XDS510配置文件片段:
<Target Name="TMS320C6748" Device="C6748">
<JTAGInterface>
<Pin TCK="3" TMS="4" TDI="5" TDO="6" TRST="2" />
<Voltage Level="3.3V" />
<Adapter Type="XDS510" />
</JTAGInterface>
</Target>
上述配置文件指定了TMS320C6748处理器的JTAG引脚映射、电压等级和调试器类型。XDS510在启动调试会话时会加载该配置,确保与目标处理器正确通信。
此外,对于某些特殊处理器,如带有多个JTAG链的多核系统,XDS510还需要通过链配置(Chain Configuration)指定各个核的TAP控制器顺序,以确保调试器能够正确识别并访问每个核的调试资源。
2.3 JTAG调试的工作流程
2.3.1 初始化与连接检测
JTAG调试的第一步是初始化和连接检测。XDS510在启动调试会话时,会通过JTAG接口向目标系统发送初始化序列,检测目标处理器是否存在并处于可调试状态。
初始化过程包括以下几个步骤:
- 复位TAP控制器 :通过TMS信号将TAP控制器置于“Test Logic Reset”状态。
- 进入IDCODE模式 :将指令寄存器设置为“IDCODE”,读取目标处理器的唯一标识码。
- 验证设备ID :将读取到的ID码与配置文件中预设的ID进行比对,确认目标处理器型号。
- 初始化调试寄存器 :根据处理器类型配置调试寄存器,使能调试功能。
以下是一个使用XDS510命令行工具( xds510 )进行连接检测的示例:
xds510 -d detect
该命令会输出类似以下信息:
Found 1 TMS320C6748 device on JTAG chain
Device ID: 0x1B89402F
该输出表明XDS510成功检测到目标处理器,并获取了其ID码。
2.3.2 指令执行与数据读写
一旦连接成功,XDS510就可以通过JTAG接口执行调试操作,如读写寄存器、设置断点、单步执行等。这些操作通常是通过发送特定的JTAG指令并交换数据实现的。
例如,读取目标处理器的PC(程序计数器)寄存器值的过程如下:
- 选择DR扫描模式 :通过TMS信号进入“Select DR Scan”状态。
- 发送指令 :将指令寄存器设置为“READ_REGISTER”。
- 发送寄存器地址 :将PC寄存器地址写入TDI。
- 读取寄存器值 :进入“Shift DR”状态,从TDO读取PC值。
以下是一个使用XDS510 API进行寄存器读取的代码示例(C语言):
#include <xdc510.h>
int main() {
XDS510_Handle h = XDS510_open();
if (!h) {
printf("Failed to open XDS510 device\n");
return -1;
}
uint32_t pc_value;
// 读取PC寄存器
XDS510_readRegister(h, PC_REGISTER, &pc_value);
printf("PC register value: 0x%08X\n", pc_value);
XDS510_close(h);
return 0;
}
代码逻辑分析:
XDS510_open():打开XDS510设备,建立与调试器的连接。XDS510_readRegister():发送JTAG指令并读取指定寄存器的值。XDS510_close():关闭设备连接,释放资源。
该代码通过XDS510的底层API实现了寄存器的读取操作,展示了JTAG调试在软件层面的具体实现方式。
2.4 JTAG调试中的常见问题与解决方案
2.4.1 通信失败的排查方法
JTAG通信失败是调试过程中常见的问题之一,可能由以下原因引起:
- 物理连接问题 :JTAG线缆损坏、引脚接触不良。
- 电压不匹配 :目标系统与调试器之间的电压等级不一致。
- TAP控制器状态异常 :目标处理器未正确复位或处于低功耗模式。
- 驱动配置错误 :XDS510配置文件中引脚映射或设备型号配置错误。
排查方法如下:
- 检查连接线缆 :使用万用表测量各引脚导通性。
- 确认电压等级 :使用示波器测量VCC和GND之间的电压。
- 强制复位目标系统 :通过复位按钮或软件命令复位目标处理器。
- 检查配置文件 :确保XDS510使用的
.cdb文件与目标处理器型号一致。
2.4.2 目标板供电与信号完整性分析
目标板的供电和信号完整性直接影响JTAG通信的稳定性。常见问题包括:
- 供电不稳定 :导致目标处理器无法正常运行。
- 信号噪声干扰 :影响TCK、TMS、TDI、TDO信号的完整性。
- 地线接触不良 :造成信号回路不完整,影响通信质量。
建议使用示波器对关键信号进行测量,观察是否存在毛刺、延迟或失真现象。此外,确保目标板的电源滤波电容良好,地线连接牢固。
以下是一个使用示波器测量TCK信号的示例:
| 信号名称 | 频率(Hz) | 幅度(V) | 稳定性 |
|---|---|---|---|
| TCK | 10 MHz | 3.3V | 稳定 |
| TMS | 变化 | 3.3V | 无毛刺 |
| TDI | 变化 | 3.3V | 波形完整 |
| TDO | 变化 | 3.3V | 无延迟 |
通过分析这些信号,可以判断JTAG接口的电气特性是否满足调试要求。
3. Code Composer Studio(CCS)集成开发环境介绍
Code Composer Studio(简称CCS)是由德州仪器(TI)推出的一款功能强大的嵌入式开发集成环境(IDE),广泛用于基于TI处理器的嵌入式系统开发。它不仅提供了代码编辑、编译、调试等基本功能,还集成了丰富的插件与扩展支持,能够满足从初学者到专业工程师的多层次开发需求。本章将深入介绍CCS的组成结构、与XDS510调试器的集成方式、插件扩展机制,以及不同版本之间的演进与兼容性问题,帮助开发者全面掌握该开发平台的核心特性。
3.1 CCS的基本组成与功能模块
3.1.1 工程管理器与代码编辑器
CCS的工程管理器是其核心模块之一,负责项目创建、配置和管理。通过工程管理器,开发者可以轻松创建新的工程、导入已有工程、管理源文件和资源,并进行编译和构建操作。
代码编辑器则提供了现代化的开发体验,支持语法高亮、自动补全、代码折叠、智能提示等功能,极大提升了代码编写的效率。编辑器支持多种语言,包括C、C++、汇编语言等,能够满足不同项目类型的开发需求。
CCS工程管理器的典型功能包括:
| 功能模块 | 描述 |
|---|---|
| 工程创建 | 支持多种目标平台(如C2000、C6000、ARM Cortex-M)的模板工程 |
| 编译配置 | 可配置编译器选项、链接器脚本、启动文件等 |
| 文件管理 | 管理源代码、头文件、库文件、资源文件等 |
| 构建系统 | 集成TI编译工具链,支持增量编译与全量编译 |
| 版本控制 | 支持SVN、Git等版本控制工具集成 |
此外,CCS的代码编辑器具备强大的语法分析能力,支持错误实时检测和错误提示,有助于开发者快速定位问题。
3.1.2 编译器、链接器与调试器的集成
CCS集成了TI的编译器(如C6000 Compiler、ARM Compiler)、链接器(Linker)和调试器(Debugger),形成了一个完整的开发流程。以下是一个典型的编译流程图:
graph TD
A[源代码.c/.cpp/.asm] --> B(编译器)
B --> C[目标文件.o]
C --> D(链接器)
D --> E[可执行文件.out/.elf]
E --> F{调试器}
F --> G[下载到目标板]
F --> H[设置断点/变量查看]
代码编译示例:
$ cl6x -mv6740 -O2 -c main.c -o main.obj
$ lnk6x -m main.map -o main.out main.obj rts6700.lib
参数说明:
- cl6x :C6000系列编译器
- -mv6740 :指定目标设备型号
- -O2 :优化等级为2
- -c :仅编译不链接
- lnk6x :链接器命令
- -m :生成内存映射文件
- -o :输出文件名
- rts6700.lib :运行时支持库
上述命令展示了如何使用CCS内置的工具链进行编译和链接操作,开发者可以在CCS中通过图形界面配置这些选项,也可以通过脚本方式进行自动化构建。
3.2 CCS与XDS510的集成方式
3.2.1 配置目标连接设置
要使用CCS与XDS510调试器协同工作,首先需要配置目标连接设置。在CCS中,可以通过“Target Configuration”工具进行设置。
配置步骤如下:
1. 打开CCS,点击菜单栏“File → New → Target Configuration File”。
2. 选择目标设备型号(如TMS320C6748)。
3. 选择连接方式为“XDS510 USB Emulator”。
4. 保存配置文件(如 mytarget.ccxml )。
5. 在调试模式下选择该配置文件,连接目标板。
配置文件内容示例:
<?xml version="1.0" encoding="UTF-8"?>
<configurations>
<configuration name="TMS320C6748">
<connection type="xds510">
<device>TI_XDS510_USB</device>
<interface>JTAG</interface>
<speed>1500</speed>
</connection>
<device type="TMS320C6748" />
</configuration>
</configurations>
参数说明:
- type="xds510" :指定使用XDS510调试器
- device :指定调试器型号
- interface :通信接口为JTAG
- speed :JTAG时钟频率,单位为kHz
该配置文件定义了目标设备和调试器之间的通信方式,是CCS识别和连接目标板的关键。
3.2.2 使用CCS加载和调试程序
在完成连接配置后,开发者可以使用CCS加载和调试程序。
调试流程如下:
1. 创建或打开一个工程。
2. 构建工程生成 .out 或 .elf 文件。
3. 点击“Debug”按钮,启动调试器。
4. 在Memory Browser中查看内存内容。
5. 设置断点、观察变量、单步执行等。
调试器控制台输出示例:
Connecting to target...
Connected to TMS320C6748 via XDS510
Loading program: main.out
Breakpoint 1 at 0x80000000
逻辑分析:
- CCS首先尝试与目标设备建立连接。
- 成功连接后,将编译生成的可执行文件下载到目标设备内存中。
- 加载完成后,程序会在入口点设置断点,等待用户进一步操作。
开发者可以在CCS中使用图形化调试工具,查看寄存器、变量、内存、调用栈等信息,也可以通过脚本进行自动化调试。
3.3 CCS的插件与扩展功能
3.3.1 DSP/BIOS实时操作系统插件
DSP/BIOS是TI为DSP处理器设计的轻量级实时操作系统(RTOS),集成在CCS中作为插件提供。它为开发者提供了任务调度、中断管理、内存管理、设备驱动等核心功能。
DSP/BIOS插件安装步骤:
1. 打开CCS,点击菜单栏“Help → Eclipse Marketplace”。
2. 搜索“DSP/BIOS”插件。
3. 安装并重启CCS。
使用DSP/BIOS配置任务的代码示例:
#include <std.h>
#include <sys/bios.h>
void task1_func(UArg arg0, UArg arg1) {
while (1) {
System_printf("Task 1 running\n");
Task_sleep(1000); // 延时1000 ticks
}
}
void main() {
Task_Params taskParams;
Task_Handle task1;
Task_Params_init(&taskParams);
taskParams.priority = 1;
taskParams.stackSize = 0x1000;
task1 = Task_create(task1_func, &taskParams, NULL);
BIOS_start();
}
代码逻辑分析:
- Task_Params_init 初始化任务参数
- Task_create 创建任务
- BIOS_start() 启动操作系统调度
- Task_sleep 实现任务延时
DSP/BIOS插件大大简化了嵌入式系统的任务管理和资源调度,适合用于实时控制、音频处理等应用场景。
3.3.2 第三方插件的安装与使用
除了官方插件,CCS还支持第三方插件的安装,例如Source Insight集成、Git插件、RTOS支持插件(如FreeRTOS)等。
安装第三方插件的方法:
1. 进入菜单“Help → Install New Software”。
2. 添加插件源地址(如FreeRTOS官方插件地址)。
3. 选择所需插件,点击“Next”进行安装。
FreeRTOS插件配置示例:
- 在工程属性中选择“RTOS → FreeRTOS”
- 配置任务栈大小、优先级、调度方式等参数
第三方插件极大地丰富了CCS的功能,使其能够适应更广泛的应用场景。
3.4 CCS版本演进与兼容性分析
3.4.1 CCS v3.x与CCS v5.x的功能对比
CCS在多个版本中不断演进,v3.x和v5.x是两个具有代表性的版本,它们在功能和架构上有显著差异。
| 功能 | CCS v3.x | CCS v5.x |
|---|---|---|
| 内核架构 | 基于Eclipse 3.x | 基于Eclipse 4.x |
| 支持平台 | 主要支持Windows | 支持Windows、Linux、macOS |
| 插件系统 | 插件较少 | 插件生态系统丰富 |
| RTOS支持 | DSP/BIOS为主 | 支持FreeRTOS、SYS/BIOS等 |
| 用户界面 | 传统Eclipse风格 | 现代化UI,支持主题切换 |
| 编译工具链 | TI编译器旧版本 | 集成更新的编译器与优化工具 |
CCS v5.x在兼容性和功能扩展性方面表现更佳,适合多平台开发和复杂项目管理。
3.4.2 多平台支持与跨版本迁移策略
随着嵌入式开发的多样化,TI也推动CCS向多平台发展。目前CCS支持在Windows、Linux和macOS上运行,方便开发者在不同操作系统环境下使用。
跨版本迁移建议:
1. 评估项目是否依赖旧版本的插件或编译器。
2. 使用CCS自带的工程迁移工具进行转换。
3. 对于使用DSP/BIOS的项目,建议迁移到SYS/BIOS或FreeRTOS。
4. 更新编译器和链接器脚本以适配新版本工具链。
迁移代码片段示例:
# 迁移旧版工程到新版CCS
$ ccs_project_migrate -v5 -p myproject
该命令将项目从旧版本迁移至CCS v5.x,自动调整配置文件和编译设置。
逻辑分析:
- 工具会检查项目依赖项
- 自动更新配置文件(如 .ccxml )
- 调整编译选项以适配新版本编译器
- 提示用户手动处理不兼容项
通过合理的迁移策略,开发者可以在不同版本的CCS之间平滑过渡,确保项目的连续性和可维护性。
本章从CCS的基本组成、与XDS510的集成方式、插件扩展机制到版本演进与兼容性分析,系统地介绍了CCS的功能与使用方法。下一章将深入探讨CCS支持的TI处理器系列及其开发策略,帮助开发者更好地适配不同硬件平台。
4. CCS支持的TI处理器系列
Code Composer Studio(CCS)作为德州仪器(TI)推出的集成开发环境,其核心优势之一在于对TI广泛处理器系列的全面支持。本章将深入探讨CCS对不同TI处理器的兼容性与适配策略,包括TI的DSP系列、ARM Cortex-M系列、以及多核架构处理器。我们将从处理器的基本特性出发,逐步深入到CCS如何为这些处理器提供定制化的开发支持,并结合实际应用场景,探讨如何优化工程配置以提高开发效率。
4.1 TI DSP处理器概述
TI的DSP(数字信号处理器)系列以其高性能的信号处理能力在工业控制、通信、音频处理等领域广泛应用。CCS作为其官方开发环境,提供了针对DSP系列的全面支持。
4.1.1 C2000系列与控制应用
C2000系列是TI专为实时控制应用设计的32位DSP,广泛应用于电机控制、电源转换和工业自动化。其核心优势在于高精度PWM生成、快速中断响应和集成的ADC模块。
CCS对C2000的支持特点:
| 功能 | 描述 |
|---|---|
| 调试支持 | 支持XDS100、XDS510、XDS560等调试器连接,提供源码级调试 |
| 编译器优化 | 提供TI C/C++编译器,支持优化指令调度和寄存器分配 |
| 驱动库支持 | 提供C2000Ware软件包,包含驱动、示例代码和系统初始化代码 |
| 实时调试 | 支持断点、观察点、变量监视等功能,便于实时调试控制逻辑 |
使用CCS开发C2000的典型步骤:
- 安装CCS并导入C2000Ware SDK
- 创建新工程,选择目标器件型号(如TMS320F28379D)
- 配置工程属性,包括编译器选项、链接脚本和调试器设置
- 编写控制逻辑代码,使用TI提供的驱动库
- 使用XDS510调试器连接目标板,进行源码级调试
#include "F28x_Project.h" // C2000头文件
void main(void)
{
InitSysCtrl(); // 初始化系统控制
DINT; // 禁用CPU中断
InitPieCtrl(); // 初始化PIE中断控制器
IER = 0x0000; // 清除所有CPU中断使能
IFR = 0x0000; // 清除所有CPU中断标志
InitPieVectTable(); // 初始化PIE向量表
// 主循环
for(;;)
{
// 控制逻辑代码
}
}
代码逻辑分析:
InitSysCtrl():初始化系统时钟、看门狗等基础模块。DINT:禁用所有中断,确保系统处于可控状态。InitPieCtrl():初始化中断控制器,准备中断服务程序。IER和IFR:中断使能和标志寄存器的清零,防止意外中断。InitPieVectTable():设置中断向量表,为后续中断处理做准备。- 主循环中可插入PWM控制、ADC采样等实时控制逻辑。
参数说明:
- F28x_Project.h :C2000系列的系统头文件,定义了寄存器地址和基础函数。
- 所有初始化函数均来自TI提供的C2000Ware库。
4.1.2 C6000系列与高性能计算
C6000系列DSP是TI面向高性能信号处理领域(如图像处理、雷达信号分析、通信协议处理)的高端产品。其多发射超标量架构和VLIW(超长指令字)特性使其在并行计算方面表现出色。
CCS对C6000系列的支持:
- 高级编译器支持 :提供TI C6000 C/C++编译器,支持自动并行化优化和指令级并行(ILP)优化。
- 仿真与调试支持 :支持C6748等典型处理器的源码级调试,集成XDS510调试器支持。
- 系统级建模 :支持SystemC建模与仿真,便于算法验证。
- 数据流分析工具 :提供Trace Analyzer,用于分析程序执行路径和数据流。
流程图展示:C6000开发流程(Mermaid格式)
graph TD
A[算法设计] --> B[使用SystemC建模]
B --> C[使用CCS编写C代码]
C --> D[编译为C6x指令]
D --> E[加载到目标板]
E --> F[使用XDS510进行调试]
F --> G[性能分析与优化]
典型C6000代码段:
#include <c6x.h>
void main()
{
_nassert((long long)ptr % 8 == 0); // 数据对齐检查
#pragma DATA_ALIGN(ptr, 8); // 强制8字节对齐
int *ptr = (int *)0x80000000; // 分配内存地址
int i;
for(i = 0; i < 1024; i++)
{
ptr[i] = i * 2;
}
}
代码分析:
_nassert:用于在运行时进行断言检查,提升代码可靠性。#pragma DATA_ALIGN:强制数据对齐,提升C6000 VLIW执行效率。ptr[i] = i * 2;:简单向量操作,演示如何在C6000上进行并行处理。
4.2 ARM Cortex-M系列的支持情况
随着TI在MCU市场的扩展,其ARM Cortex-M系列芯片(如MSP432、TM4C129等)也逐渐成为主流。CCS通过集成CMSIS(Cortex Microcontroller Software Interface Standard)支持,为这些处理器提供完整开发环境。
4.2.1 M3/M4内核的调试支持
ARM Cortex-M3/M4内核支持Thumb-2指令集,具备低功耗、高性能的特点,广泛用于工业控制、物联网设备和智能传感器。
CCS对Cortex-M3/M4的支持:
| 支持特性 | 描述 |
|---|---|
| 调试器支持 | 支持JTAG/SWD接口,兼容XDS510等调试器 |
| 编译器支持 | 支持GCC和TI ARM编译器 |
| 系统初始化 | 提供CMSIS驱动库和启动文件 |
| 实时调试 | 支持断点、Watchpoint、实时变量监视 |
使用CCS调试Cortex-M4的流程:
- 安装TI ARM编译器和CMSIS支持包
- 创建工程,选择目标芯片型号(如TM4C1294NCPDT)
- 配置调试器为SWD模式,连接XDS510调试器
- 编写初始化代码(如系统时钟、GPIO、中断控制器)
- 使用CCS的调试功能进行源码级调试
示例代码:GPIO控制
#include <stdint.h>
#include "tm4c1294ncpdt.h"
int main(void)
{
SYSCTL_RCGCGPIO_R |= 0x20; // 使能GPIOF时钟
while((SYSCTL_PRGPIO_R & 0x20) == 0); // 等待时钟稳定
GPIO_PORTF_DIR_R |= 0x0E; // 设置PF1-PF3为输出
GPIO_PORTF_DEN_R |= 0x0E; // 启用数字功能
while(1)
{
GPIO_PORTF_DATA_R ^= 0x0E; // 翻转LED状态
for(int i = 0; i < 100000; i++);
}
}
代码分析:
SYSCTL_RCGCGPIO_R |= 0x20:使能GPIOF模块的时钟,确保其正常工作。GPIO_PORTF_DIR_R |= 0x0E:设置PF1-PF3为输出模式。GPIO_PORTF_DEN_R |= 0x0E:启用GPIOF的数字功能。- 主循环中实现LED闪烁功能,通过延时循环实现定时翻转。
4.2.2 启动流程与内存映射配置
Cortex-M系列的启动流程通常由 startup.s 文件控制,该文件定义了中断向量表、堆栈初始化和系统入口函数。
典型的启动流程:
- 复位后,处理器从
0x0000_0000地址读取初始堆栈指针值。 - 接着跳转到复位中断处理函数(Reset_Handler)。
- Reset_Handler会调用
SystemInit()进行系统初始化。 - 最后跳转到main()函数执行用户代码。
内存映射配置:
在CCS中,内存映射通过 .cmd 链接脚本文件定义,常见配置如下:
MEMORY
{
FLASH (RX) : ORIGIN = 0x00000000, LENGTH = 0x00040000
SRAM (RWX) : ORIGIN = 0x20000000, LENGTH = 0x00008000
}
SECTIONS
{
.text : {
*(.isr_vector)
*(.text)
} > FLASH
.data : {
*(.data)
} > SRAM
.bss : {
*(.bss)
} > SRAM
}
参数说明:
MEMORY:定义FLASH和SRAM的起始地址与大小。.text:代码段,包含中断向量表和程序指令。.data:已初始化的全局变量。.bss:未初始化的全局变量。
4.3 CCS对多核处理器的支持
随着多核架构的普及,TI推出了多核处理器(如AM5728、C6678等),CCS也相应地增强了对多核架构的调试与管理能力。
4.3.1 多核架构的调试挑战
多核调试相比单核更加复杂,主要挑战包括:
- 核间通信 :需要确保各核之间的数据同步与共享。
- 调试器连接 :每个核可能需要独立的调试通道。
- 断点管理 :多个核同时设置断点可能导致执行不一致。
- 资源竞争 :访问共享外设或内存时可能引发冲突。
CCS对多核调试的支持:
- 支持多核并行调试,可同时连接多个核。
- 提供核间通信(IPC)调试插件。
- 支持核间断点同步与异步控制。
- 内置多核日志分析工具,便于调试核间交互逻辑。
4.3.2 核间通信与同步机制
TI多核处理器通常采用以下核间通信方式:
- 共享内存 :多个核共享一块内存区域,通过锁机制(如Spinlock)进行访问控制。
- 邮箱(Mailbox) :通过专用寄存器传递消息。
- 中断机制 :一个核向另一个核发送中断通知。
示例:使用Mailbox进行核间通信(C6678)
#include <ti/sysbios/family/c64p/Cache.h>
#include <ti/sysbios/family/c64p/Mailbox.h>
Mailbox_Handle mb0, mb1;
void core0_func()
{
Mailbox_Params params;
Mailbox_Params_init(¶ms);
mb0 = Mailbox_open(0, ¶ms); // 打开Mailbox0
Mailbox_send(mb0, 0x12345678); // 发送数据
}
void core1_func()
{
mb1 = Mailbox_open(1, NULL);
UInt32 data;
Mailbox_receive(mb1, &data); // 接收数据
}
代码分析:
Mailbox_open():打开指定编号的邮箱。Mailbox_send():发送数据到指定邮箱。Mailbox_receive():接收来自邮箱的数据。
同步机制:
- 使用Mailbox时,发送和接收是阻塞式调用,确保数据同步。
- 可配合Spinlock使用共享内存,实现更复杂的数据交换。
4.4 针对不同处理器的工程配置策略
在CCS中,针对不同处理器的工程配置是确保开发顺利进行的关键。以下是一些常见配置策略。
4.4.1 链接脚本与启动代码的定制
不同处理器的内存布局不同,因此需要定制链接脚本(.cmd文件)和启动代码(startup.s)。
通用策略:
- 使用TI提供的默认模板作为基础。
- 修改MEMORY段以匹配目标处理器的Flash和RAM地址。
- 调整SECTIONS段以适应不同模块的内存分配。
4.4.2 内存映射与外设初始化设置
在CCS项目中,应根据处理器手册配置内存映射和外设初始化。
典型步骤:
- 确定处理器的内存映射(如FLASH、SRAM起始地址)。
- 编写或修改链接脚本。
- 在main函数中添加外设初始化代码(如GPIO、UART、SPI等)。
- 使用CCS的调试功能验证外设是否正常工作。
外设初始化示例(UART):
#include "driverlib/uart.h"
void UART_Init()
{
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART0); // 使能UART0外设
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA); // 使能GPIOA(UART0引脚)
GPIOPinConfigure(GPIO_PA0_U0RX); // 配置PA0为UART0 RX
GPIOPinConfigure(GPIO_PA1_U0TX); // 配置PA1为UART0 TX
GPIOPinTypeUART(GPIO_PORTA_BASE, GPIO_PIN_0 | GPIO_PIN_1);
UARTConfigSetExpClk(UART0_BASE, SysCtlClockGet(), 115200,
(UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE |
UART_CONFIG_PAR_NONE));
}
代码分析:
SysCtlPeripheralEnable():使能外设时钟。GPIOPinConfigure():配置GPIO引脚为UART功能。UARTConfigSetExpClk():设置波特率、数据位、停止位和校验位。
通过以上内容,我们系统性地分析了CCS对TI处理器系列的支持机制,涵盖了从DSP到ARM Cortex-M再到多核架构的全面开发策略。下一章节将继续探讨CCS在代码编辑与调试功能方面的高级特性。
5. CCS代码编辑与调试功能
5.1 CCS的代码编辑功能
5.1.1 语法高亮与自动补全
Code Composer Studio(CCS)作为TI嵌入式开发的核心集成开发环境(IDE),其代码编辑器功能强大且高效。语法高亮是CCS编辑器的基础功能之一,它通过颜色区分不同类型的代码元素(如关键字、变量、注释、字符串等),从而提升代码的可读性和调试效率。
例如,C语言中常见的关键字如 int 、 return 、 while 等会以蓝色高亮,而注释内容则以绿色显示,字符串则以红色标出。这种视觉区分有助于开发者快速识别代码结构和潜在错误。
此外,CCS还支持 自动补全功能(Content Assist) ,该功能基于代码上下文提供变量名、函数名、宏定义等的智能补全建议。例如,在输入函数名时,只需输入前几个字母即可触发补全弹窗,如下图所示。
graph TD
A[用户输入"GPIO_"] --> B{触发自动补全}
B --> C[弹出GPIO相关函数列表]
C --> D[选择函数名]
D --> E[自动补全完整函数]
在使用过程中,开发者可以通过快捷键 Ctrl + Space 主动调出补全建议。此外,还可以在CCS的设置中配置补全规则,例如是否启用模糊匹配、是否显示函数参数提示等。
5.1.2 代码折叠与结构导航
CCS编辑器还支持 代码折叠(Code Folding) 功能,允许开发者将函数体、结构体、宏定义等代码块折叠为一行,便于快速浏览整个文件的逻辑结构。例如,一个包含多个函数的C源文件可以通过折叠功能仅显示函数签名,提升阅读效率。
此外, 结构导航(Outline View) 窗口能够展示当前文件的结构信息,包括全局变量、函数声明、宏定义等,并支持点击跳转。开发者可以在左侧项目资源管理器中打开 .c 或 .h 文件,右侧的Outline视图会自动更新并显示当前文件的结构层次。
例如,以下是一个简单的C语言源文件:
#include <stdio.h>
#define MAX(a, b) ((a) > (b) ? (a) : (b))
int main() {
int a = 10, b = 20;
printf("Max is %d\n", MAX(a, b));
return 0;
}
在Outline视图中会显示如下结构:
| 类型 | 名称 | 位置 |
|---|---|---|
| 宏 | MAX | line 3 |
| 函数 | main | line 5 |
这种结构导航功能极大地提升了代码维护和阅读效率,尤其是在处理大型项目时。
5.2 实时调试技术详解
5.2.1 设置断点与观察点
在嵌入式开发中,断点(Breakpoint)是最常用的调试手段之一。CCS支持 软件断点 和 硬件断点 两种类型。
- 软件断点 :通过替换目标指令为调试指令(如ARM中的
BKPT指令)实现,适用于大多数代码段,但可能影响程序运行时序。 - 硬件断点 :利用处理器内部的调试寄存器设置,不修改原始代码,适用于中断服务程序、异常处理等关键代码段。
在CCS中设置断点非常简单:双击代码编辑器左侧的空白区域即可设置或取消断点。例如,在以下代码中设置断点:
void delay(volatile unsigned long n) {
while(n--); // << 设置断点
}
此时,CCS会在左侧显示红色断点标记。运行程序时,当执行到该行代码时会自动暂停,便于开发者检查寄存器、内存、变量值等。
此外,CCS还支持 观察点(Watchpoint) ,即对某个内存地址或变量进行读写监控。例如,可以设置一个观察点来监控全局变量 g_count :
int g_count = 0;
void increment() {
g_count++; // 观察该变量的变化
}
操作步骤如下:
- 打开“Expressions”窗口;
- 添加变量
g_count; - 右键点击变量,选择“Set Watchpoint”;
- 设置读/写/访问三种触发条件。
这样,当 g_count 被修改时,程序会自动暂停,开发者可以查看调用栈和上下文信息。
5.2.2 变量监视与内存查看
在调试过程中,开发者经常需要查看变量的值或内存地址的内容。CCS提供了多种方式来实现这一目标:
- Variables窗口 :实时显示当前作用域内的局部变量和全局变量的值。
- Expressions窗口 :支持添加任意表达式进行实时求值,例如
ptr->value、array[i]等。 - Memory Browser窗口 :允许开发者查看和修改指定内存地址的内容。
例如,在调试如下结构体时:
typedef struct {
int id;
char name[20];
} User;
User user = {1, "Alice"};
在Variables窗口中可以看到 user.id 和 user.name 的值。如果想查看 user 在内存中的布局,可以在Memory Browser中输入地址 &user ,结果如下表所示:
| 地址 | 值(十六进制) | 解释 |
|---|---|---|
| 0x20000000 | 0x00000001 | id = 1 |
| 0x20000004 | 0x656C6941 | name[0~3] = ‘A’,’l’,’i’,’c’ |
| 0x20000008 | 0x6573A065 | name[4~7] = ‘e’,’s’,0,0x65 |
这种内存查看功能对于理解数据结构的对齐方式、指针操作、内存泄漏等问题非常有帮助。
5.3 调试过程中日志与跟踪功能
5.3.1 使用RTA进行运行时分析
CCS内置的 Runtime Analysis(RTA) 功能可以用于实时分析程序的执行行为,包括函数调用频率、堆栈使用情况、任务调度等。RTA依赖于目标板上的调试接口(如XDS510)与CCS之间的通信,无需修改应用程序逻辑。
启用RTA的步骤如下:
- 在CCS中打开“Run”菜单,选择“Profile As” > “RTA Analysis”;
- 配置分析类型(如CPU使用率、函数调用次数、堆栈使用);
- 开始运行程序;
- 在“RTA Explorer”窗口查看分析结果。
例如,分析某个函数的调用次数:
| 函数名 | 调用次数 | 累计执行时间(ms) |
|---|---|---|
| process_data | 1520 | 2345 |
| init_system | 1 | 56 |
RTA还可以生成调用图(Call Graph),帮助开发者理解函数之间的调用关系:
graph TD
A[main] --> B[init_system]
A --> C[process_data]
C --> D[data_filter]
C --> E[data_transform]
这种图形化展示方式极大地提升了对程序运行路径的理解和优化方向的判断。
5.3.2 调试信息的记录与导出
在调试过程中,CCS支持将调试信息导出为文本或CSV文件,便于后续分析和归档。例如,开发者可以将内存快照、变量变化记录、日志信息等保存为文件。
操作步骤如下:
- 在Memory Browser中选择要导出的内存区域;
- 右键点击,选择“Save Memory”;
- 选择文件格式(如
.bin、.txt、.hex); - 保存文件。
此外,开发者还可以使用CCS的脚本功能(如GEL脚本)自动记录变量值的变化。例如:
onTargetReset() {
logFile = "log.txt";
fileOpen(logFile, "w");
}
onHalt() {
count = g_count;
fileWrite(logFile, "Current count: " + count + "\n");
}
该脚本会在每次程序暂停时将 g_count 的值写入日志文件,便于后续分析。
5.4 高级调试技巧
5.4.1 条件断点与脚本调试
条件断点(Conditional Breakpoint)允许开发者在满足特定条件时触发断点,而不是每次执行到该行代码都暂停。这在调试复杂循环或状态机时非常有用。
例如,以下代码中,我们只在 i == 5 时暂停:
for(int i = 0; i < 10; i++) {
process(i); // 设置条件断点:i == 5
}
在CCS中设置条件断点的方法如下:
- 设置普通断点;
- 右键点击断点,选择“Breakpoint Properties”;
- 勾选“Conditional Breakpoint”,输入条件表达式。
此外,CCS支持使用 GEL脚本 自动化调试流程。例如,可以编写脚本在程序启动时自动加载配置、设置寄存器、打印日志等。
以下是一个简单的GEL脚本示例:
main() {
GEL_Reset();
GEL_Load("myapp.out");
GEL_Run();
GEL_Break("main");
GEL_Step();
GEL_Print("Current PC: 0x%x", GEL_ReadReg("PC"));
}
该脚本将自动完成复位、加载程序、运行、断点、单步执行并打印当前PC值的操作。
5.4.2 实时数据采集与分析
在调试实时系统时,开发者常常需要采集外部传感器数据、ADC采样值、通信数据流等。CCS支持通过 数据可视化插件 (如Graph窗口)实时绘制数据波形。
例如,假设我们有一个ADC采样函数:
#define BUF_SIZE 1024
short adc_buffer[BUF_SIZE];
void collect_adc_data() {
for(int i = 0; i < BUF_SIZE; i++) {
adc_buffer[i] = read_adc(); // 实时采集数据
}
}
在CCS中,可以使用Graph窗口查看 adc_buffer 的波形:
- 打开“View” > “Graph” > “Time/Frequency”;
- 设置变量名为
adc_buffer; - 设置起始索引为0,长度为1024;
- 启动程序并运行到数据采集完成;
- 点击“Run”按钮,图形窗口将实时显示ADC采样波形。
这种方式非常适合调试音频处理、传感器信号采集、控制反馈系统等实时应用。
此外,CCS还支持将采集到的数据导出为CSV文件,供MATLAB、Python等工具进一步分析:
import pandas as pd
# 读取导出的CSV文件
df = pd.read_csv("adc_data.csv")
# 绘制波形
df.plot()
通过这种方式,开发者可以结合CCS与高级分析工具,形成完整的嵌入式调试与数据分析流程。
6. 驱动程序在硬件通信中的作用
在嵌入式开发过程中,驱动程序扮演着至关重要的角色。尤其是在使用XDS510调试器与目标设备进行通信时,驱动程序不仅负责硬件与操作系统之间的接口,还承担着数据传输、状态同步、协议封装等关键任务。本章将深入探讨驱动程序的基本功能、XDS510驱动在Windows系统中的安装与配置、驱动调试与日志记录方法,以及其与Code Composer Studio(CCS)的协同工作机制。
6.1 驱动程序的基本功能
驱动程序是操作系统与硬件之间的桥梁。它负责将操作系统对硬件的操作请求转化为硬件可识别的指令,并将硬件的状态信息反馈给系统。在嵌入式开发中,驱动程序的稳定性和兼容性直接影响到调试器与目标设备之间的通信效率。
6.1.1 硬件抽象与设备管理
驱动程序的核心功能之一是硬件抽象。通过抽象层,操作系统可以以统一的方式访问不同型号的硬件设备。例如,XDS510调试器通过USB接口与主机连接,驱动程序会将USB通信协议抽象为通用的串口或自定义设备接口,使得上层软件(如CCS)无需关心底层硬件的具体实现。
以下是一个简化的USB驱动程序抽象模型:
graph TD
A[操作系统] --> B(驱动程序)
B --> C[USB控制器]
C --> D[XDS510调试器]
在该模型中,驱动程序负责将操作系统的I/O请求转换为USB协议的数据包,并通过USB控制器发送到XDS510设备。
6.1.2 数据传输协议的实现
驱动程序还必须实现与目标设备之间的通信协议。对于XDS510而言,其与目标处理器之间的通信通常基于JTAG协议,而与主机之间的通信则通过USB协议实现。驱动程序需要将JTAG指令封装为USB数据包,并在接收端进行解封装。
以下是一个简单的USB数据传输示例代码片段(基于Windows WDM驱动模型):
NTSTATUS UsbIoctlHandler(PDEVICE_OBJECT DeviceObject, PIRP Irp) {
PIO_STACK_LOCATION irpStack = IoGetCurrentIrpStackLocation(Irp);
ULONG ioctlCode = irpStack->Parameters.DeviceIoControl.IoControlCode;
switch (ioctlCode) {
case IOCTL_XDS510_SEND_JTAG_COMMAND:
// 将JTAG命令封装为USB数据包
UsbSendPacket(Irp->AssociatedIrp.SystemBuffer,
irpStack->Parameters.DeviceIoControl.InputBufferLength);
break;
case IOCTL_XDS510_RECEIVE_RESPONSE:
// 从USB接收响应数据
UsbReceivePacket(Irp->AssociatedIrp.SystemBuffer,
irpStack->Parameters.DeviceIoControl.OutputBufferLength);
break;
default:
return STATUS_INVALID_DEVICE_REQUEST;
}
return STATUS_SUCCESS;
}
代码逻辑分析
UsbIoctlHandler是处理设备IO控制请求的函数。IOCTL_XDS510_SEND_JTAG_COMMAND和IOCTL_XDS510_RECEIVE_RESPONSE是自定义的IO控制码,用于标识发送JTAG命令和接收响应数据。UsbSendPacket和UsbReceivePacket是封装USB通信的底层函数,负责将数据发送到XDS510或从其接收响应。- 该代码展示了驱动程序如何将上层的JTAG操作转换为底层的USB通信。
6.2 XDS510驱动在Windows系统中的安装
在使用XDS510调试器前,必须正确安装其驱动程序。TI提供了针对不同操作系统的驱动支持,开发者需要根据系统版本选择合适的驱动并进行安装。
6.2.1 USB驱动的安装与更新
XDS510调试器通常通过USB接口连接到主机。首次连接时,Windows系统会提示发现新硬件,并尝试自动安装驱动。如果自动安装失败,开发者需手动安装TI提供的驱动程序。
安装步骤如下:
- 连接XDS510调试器 到主机的USB端口。
- 打开“设备管理器”,找到未识别的设备(通常显示为“Unknown Device”)。
- 右键点击设备,选择“更新驱动程序”。
- 选择“浏览我的计算机以查找驱动程序”。
- 定位到TI提供的驱动安装包目录,例如:
C:\ti\ccsv5\ccs_base\debugserver\drivers。 - 完成安装后,设备管理器中将显示“XDS510 Emulator”。
以下是一个驱动安装后的设备管理器截图示意图(用表格模拟):
| 设备名称 | 状态 | 驱动程序版本 |
|---|---|---|
| XDS510 Emulator | 正常运行 | v1.0.0.12 |
| USB Serial Port | 正常运行 | v2.3.4.5 |
6.2.2 驱动与操作系统兼容性
XDS510驱动支持从Windows XP到Windows 10等多个操作系统版本。但在某些系统(如Windows 10 64位)中,可能需要禁用驱动程序签名强制以安装未签名的驱动。
禁用驱动签名强制的步骤:
- 打开命令提示符(管理员权限)。
- 输入以下命令:
cmd bcdedit /set testsigning on - 重启系统。
- 安装驱动后,重新启用驱动签名强制:
cmd bcdedit /set testsigning off
注意:禁用驱动签名强制可能带来系统稳定性风险,建议仅在测试环境下使用。
6.3 驱动程序的调试与日志记录
在开发或使用过程中,驱动程序可能会出现异常行为,如通信中断、设备识别失败等。为了定位问题,开发者可以使用调试工具和日志记录功能来分析驱动运行状态。
6.3.1 使用Driver Monitor工具
TI提供了Driver Monitor工具来帮助开发者监控XDS510驱动的运行状态。该工具可以显示当前连接的调试器信息、通信状态、错误日志等。
使用Driver Monitor的步骤如下:
- 打开TI安装目录下的
Driver Monitor工具(路径如:C:\ti\ccsv5\ccs_base\common\uscif\bin\DriverMonitor.exe)。 - 程序启动后会自动检测连接的调试器。
- 查看当前驱动状态、通信速率、连接时间等信息。
- 如果有错误发生,会显示在日志区域。
以下是一个Driver Monitor的界面示意图(以表格形式展示):
| 调试器名称 | 状态 | 驱动版本 | 最后通信时间 |
|---|---|---|---|
| XDS510 | 正常连接 | v1.0.0.12 | 2025-04-05 14:32 |
6.3.2 日志分析与故障排查
驱动程序通常会生成日志文件,记录通信过程中的关键事件和错误信息。开发者可以通过日志快速定位问题。
日志文件结构示例:
[2025-04-05 14:32:10] INFO: Device connected (VID=0x0451, PID=0xBEF3)
[2025-04-05 14:32:15] DEBUG: Sending JTAG command: 0x01
[2025-04-05 14:32:20] ERROR: Timeout waiting for response from target
[2025-04-05 14:32:25] WARNING: USB communication speed reduced to 480 Mbps
常见问题及排查方法:
| 问题现象 | 可能原因 | 解决方法 |
|---|---|---|
| 设备未被识别 | 驱动未安装或签名错误 | 重新安装驱动,关闭驱动签名强制 |
| JTAG通信失败 | 目标板未供电或连接异常 | 检查电源和JTAG连接线 |
| 驱动崩溃或频繁断开连接 | 驱动版本不兼容 | 更新到最新版TI驱动 |
| 通信速率慢 | USB接口性能问题 | 更换USB接口或使用更高速度的线缆 |
6.4 驱动程序与CCS的协同工作机制
XDS510驱动程序不仅服务于操作系统,还与CCS(Code Composer Studio)紧密协作,共同完成嵌入式开发任务。CCS通过调用底层驱动接口,实现对目标设备的调试控制。
6.4.1 CCS如何调用底层驱动
CCS通过TI提供的调试服务器(Debug Server)与XDS510驱动进行交互。调试服务器作为中间层,负责将CCS的调试命令(如设置断点、读写寄存器等)通过驱动发送到XDS510,并接收目标设备的响应。
其通信流程如下图所示:
sequenceDiagram
participant CCS
participant DebugServer
participant Driver
participant XDS510
CCS->>DebugServer: 发送调试命令(如读寄存器)
DebugServer->>Driver: 调用驱动API(如XDS510_ReadReg)
Driver->>XDS510: 通过USB发送JTAG指令
XDS510-->>Driver: 返回寄存器值
Driver-->>DebugServer: 返回结果
DebugServer-->>CCS: 显示寄存器值
在该流程中,驱动程序作为通信的底层实现,承担了数据传输和协议转换的任务。
6.4.2 驱动接口的扩展与维护
随着硬件和调试协议的发展,驱动接口需要不断扩展以支持新功能。例如,XDS510驱动最初仅支持基本的JTAG通信,随着多核处理器的普及,驱动接口逐步增加了对多核调试的支持。
以下是一个扩展驱动接口的示例代码:
typedef struct _XDS510_DRIVER_INTERFACE {
NTSTATUS (*Initialize)(void);
NTSTATUS (*SendCommand)(PVOID command, ULONG length);
NTSTATUS (*ReceiveResponse)(PVOID buffer, ULONG length);
NTSTATUS (*SetCoreMask)(ULONG coreMask); // 新增接口:设置多核掩码
NTSTATUS (*EnableTrace)(BOOLEAN enable); // 新增接口:启用跟踪功能
} XDS510_DRIVER_INTERFACE, *PXDS510_DRIVER_INTERFACE;
代码解析
XDS510_DRIVER_INTERFACE是驱动接口结构体,定义了多个函数指针。SetCoreMask接口用于设置调试目标的多核掩码,以便选择需要调试的CPU核心。EnableTrace接口用于启用或禁用调试器的跟踪功能,支持更高级的调试分析。
这种接口设计允许驱动在不破坏现有功能的前提下进行功能扩展,同时也方便CCS等上层工具动态加载和调用新功能。
本章详细探讨了驱动程序在嵌入式开发中的核心作用,从硬件抽象、数据传输协议、驱动安装与兼容性、日志记录与调试,到其与CCS的协同工作机制。通过深入分析XDS510驱动的实现机制,开发者可以更好地理解其在调试流程中的重要性,并为后续的高级调试与优化打下坚实基础。
7. XDS510与CCS协同开发流程
7.1 开发流程的整体架构
嵌入式开发的完整流程通常包括代码编写、编译链接、程序下载、调试运行等多个阶段。在这一流程中, Code Composer Studio(CCS) 作为开发平台,提供集成开发环境支持,而 XDS510调试器 则作为硬件调试接口,负责与目标处理器通信。两者协同工作,构成了从源代码到目标设备运行的闭环系统。
代码开发到目标运行的全过程
整个开发流程可以分为以下几个关键步骤:
- 项目创建与配置 :在CCS中创建工程,配置目标处理器型号、编译器选项、链接脚本等。
- 代码编写与编译 :使用CCS编辑器编写C/C++代码,通过TI编译器编译生成目标平台的可执行文件(通常为
.out或.elf格式)。 - 链接与构建 :链接器根据链接脚本将多个目标文件整合为一个完整的可执行映像文件。
- 程序下载与启动 :通过XDS510调试器将可执行文件下载到目标设备的内存中,并控制其启动运行。
- 调试与优化 :使用CCS提供的调试工具(如断点、观察点、变量查看等)进行实时调试,优化程序性能。
CCS与XDS510的角色定位
- CCS :提供开发、编译、调试、性能分析等一站式开发环境。
- XDS510 :作为调试接口设备,负责将调试命令传输至目标处理器,同时支持实时监控、断点设置、内存读写等底层操作。
7.2 工程构建与下载机制
ELF文件的生成与加载
在嵌入式开发中,ELF(Executable and Linkable Format)是一种常见的可执行文件格式。CCS使用TI的链接器( lnk 命令)根据链接脚本( .cmd 文件)生成ELF文件。
示例:生成ELF文件的命令流程
cl6x -mv6740 --include_path="C:\ti\ccsv5\tools\compiler\c6000_7.3.0\include" \
-g -z -i"C:\ti\ccsv5\tools\compiler\c6000_7.3.0\lib" \
-i"C:\ti\ccsv5\tools\compiler\c6000_7.3.0\include" \
-o main.obj main.c
上述命令使用TI C6000编译器编译 main.c 源文件,生成目标文件 main.obj 。随后,链接器将多个目标文件和库文件链接成ELF文件:
lnk6x -m main.map -o main.out main.obj vectors.obj
最终生成的 main.out 即可通过XDS510下载到目标设备。
程序下载与引导过程分析
程序下载过程由CCS通过XDS510发送到目标板的RAM或Flash中。以C6748 DSP为例,其启动流程如下:
- 复位向量加载 :CPU从预定义的地址(如0x00000000)读取复位向量,跳转至启动代码。
- 系统初始化 :执行启动代码(通常是
c_int00函数),初始化堆栈、中断向量表等。 - 主程序运行 :跳转至用户定义的
main()函数,开始执行应用程序。
XDS510在此过程中充当调试接口,支持断点设置、单步执行、内存读写等操作,便于开发者实时监控程序执行状态。
7.3 联合调试实践案例
7.3.1 基于C6748的音频处理调试
在音频处理项目中,我们通常使用C6748 DSP进行实时音频解码与播放。以下是调试流程示例:
调试步骤:
- 在CCS中创建C6748工程,导入音频解码库。
- 使用XDS510连接目标板,配置目标连接为“C6748”。
- 编译并下载程序至目标板。
- 设置断点于音频解码函数入口,观察输入输出缓冲区数据。
- 使用CCS的Memory Browser功能查看音频缓冲区内容,确认数据正确性。
- 利用RTA插件记录解码时间,优化算法效率。
示例:查看内存缓冲区内容
short input_buffer[1024]; // 输入音频数据缓冲区
short output_buffer[1024]; // 输出音频数据缓冲区
在CCS中,通过菜单 View → Memory 输入 input_buffer 地址,即可查看数据内容。
7.3.2 Cortex-M4上的实时控制调试
在工业控制场景中,Cortex-M4常用于实现PID控制算法。以下是调试流程:
调试步骤:
- 在CCS中创建M4工程,导入CMSIS库。
- 配置XDS510连接目标板,选择M4内核。
- 编写PID控制算法,并设置断点于控制循环入口。
- 使用Watch窗口实时查看PID参数(Kp、Ki、Kd)及误差值。
- 使用Trace功能记录控制输出波形,验证稳定性。
- 若发现控制输出异常,使用Call Stack窗口分析函数调用路径。
示例:PID控制函数
float pid_calculate(float setpoint, float feedback) {
error = setpoint - feedback;
integral += error * dt;
derivative = (error - last_error) / dt;
output = Kp * error + Ki * integral + Kd * derivative;
last_error = error;
return output;
}
通过CCS的Watch窗口可以实时观察 error 、 integral 、 output 等变量值,辅助调试。
7.4 常见协同开发问题与解决方法
7.4.1 连接失败与目标识别问题
问题现象:
- CCS提示“Target not detected”。
- XDS510指示灯不亮或闪烁异常。
解决方案:
- 检查硬件连接 :确认JTAG线缆连接稳固,目标板供电正常。
- 更换JTAG适配器 :尝试使用其他JTAG接口或更换目标板。
- 更新驱动程序 :重新安装XDS510 USB驱动,确保驱动版本兼容。
- 配置CCS连接设置 :进入
Target Configuration页面,选择正确的处理器型号和仿真器类型。
7.4.2 程序运行异常与堆栈分析
问题现象:
- 程序下载后无法运行或运行崩溃。
- CCS提示“Program Counter at 0x00000000”。
解决方案:
- 检查复位向量配置 :确保启动代码中复位向量地址正确。
- 使用Call Stack窗口 :查看当前调用堆栈,定位异常函数。
- 分析堆栈指针 :在Memory Browser中查看SP寄存器指向的堆栈区域是否有溢出。
- 启用Watchdog复位 :在调试过程中启用看门狗,防止程序死循环。
示例:查看SP寄存器值
在CCS中,打开Registers窗口,查找 SP 寄存器值(如 0x80001000 ),然后在Memory Browser中输入该地址,查看堆栈内容:
Address: 0x80001000
Data: 0x00000000 0x00000000 0x00000000 0x00000000
若堆栈区域全为0,说明堆栈未被初始化或溢出。
(注:本章节内容符合递进式结构,结合代码示例、寄存器分析、调试流程说明,适合有5年以上经验的嵌入式开发者深入理解XDS510与CCS协同开发机制。)
简介:本文围绕TI(德州仪器)嵌入式开发中的核心工具链“XDS510+CCS+Driver”展开,介绍XDS510 JTAG调试器的功能与使用方式,Code Composer Studio(CCS)作为集成开发环境的全面功能,以及驱动程序在PC与目标硬件通信中的关键作用。通过这些工具的组合,开发者可以高效完成基于TI处理器的嵌入式系统设计、调试与优化。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐

 9
9 0
0- 0



 已为社区贡献73条内容
已为社区贡献73条内容

所有评论(0)