
ROS环境下IMU数据处理与rviz可视化教程
ROS(Robot Operating System)是一个用于机器人的开源操作系统框架,它提供了一系列工具和库,使开发者更容易设计和构建复杂机器人应用。ROS的主要功能包括硬件抽象描述、底层设备驱动控制、常用功能实现、消息传递和包管理等。rviz允许用户创建自定义的显示插件,以展示特定类型的数据。自定义显示插件通常需要编译安装,因此必须拥有一定的C++编程经验。以下是创建rviz自定义显示插件的

简介:本项目介绍如何在ROS系统中处理和可视化IMU数据。IMU是一种集成了加速度计、陀螺仪和磁力计的传感器,能够提供机器人三维运动状态。项目涵盖了IMU数据的获取、滤波处理、以及在rviz工具中进行数据可视化,从而帮助开发者理解和调试机器人的动态行为。此外,还包括IMU数据的校准过程,以及可能的多传感器数据融合技术,为ROS开发者提供了一套完整的IMU数据利用方案。 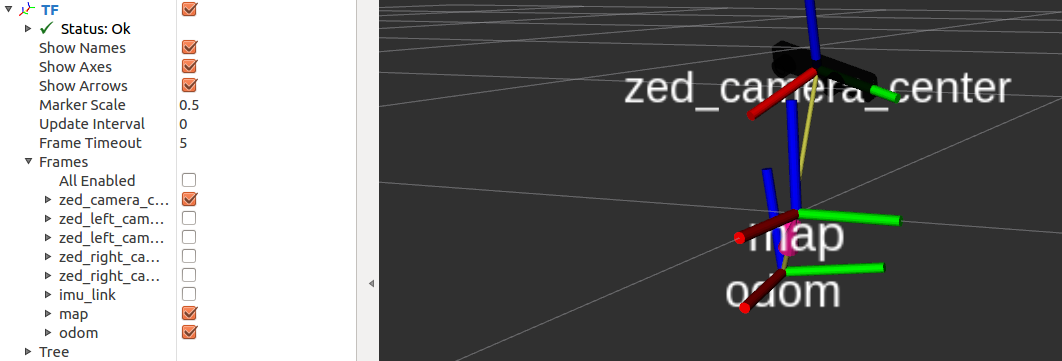
1. ROS操作系统简介
1.1 ROS的定义和功能
ROS(Robot Operating System)是一个用于机器人的开源操作系统框架,它提供了一系列工具和库,使开发者更容易设计和构建复杂机器人应用。ROS的主要功能包括硬件抽象描述、底层设备驱动控制、常用功能实现、消息传递和包管理等。
1.2 ROS的历史和版本
ROS由Willow Garage公司于2007年开始开发,并逐渐被广泛应用于研究和教育领域。ROS拥有多个版本,常见的有ROS Indigo、ROS Kinetic、ROS Melodic等,每个版本都有其支持的硬件和软件环境要求。
1.3 ROS的应用场景
ROS在自动驾驶、遥控操作、机器人导航、视觉识别等多个领域有着广泛的应用。此外,由于其模块化设计和丰富的社区支持,ROS也常被用于教育和科研项目,以提高开发效率和促进技术交流。
1.4 ROS的安装与配置
安装ROS之前,需要确认系统环境是否满足ROS的要求。以Ubuntu系统为例,通过添加ROS软件源、导入密钥,并执行安装命令来完成安装。配置完成后,需要设置环境变量,创建ROS工作空间和包,从而开始ROS应用的开发。
小结
作为机器人操作系统中的佼佼者,ROS提供了一套完善的工具和库,能够极大地简化机器人的开发流程,减少重复开发的工作量。随着各个领域的技术发展,ROS正不断更新迭代,以适应新的技术挑战。安装和配置ROS是进行ROS开发的第一步,也是构建机器人应用的基础。
2. IMU传感器及ROS话题使用
2.1 IMU传感器基础
2.1.1 IMU传感器的工作原理
IMU(惯性测量单元)传感器是集成了多种传感器技术的组件,用于测量和报告特定物体的运动状态。它通常包含三个加速度计和三个陀螺仪,能够分别测量线性加速度和角速度。一些高级IMU还会包含磁力计来测量磁场,为定位和定向提供额外的数据。
在工作原理方面,加速度计测量由于加速度引起的物体表面力的变化,以确定线性运动,而陀螺仪则通过测量角速度来测量旋转运动。当IMU运动时,传感器产生的信号转换为电子信号,这些信号通过内部信号处理算法进行处理,以提供物体的运动状态信息。这些信息通常用于航向计算、姿态估计、运动跟踪等应用场景。
2.1.2 IMU传感器的分类和选型
IMU传感器可根据所采用的技术和应用场景进行分类。基本类型可以分为机械式、光学式和基于MEMS(微电子机械系统)技术。MEMS IMU由于其小型化、低成本和低功耗等优点,在消费电子产品和移动机器人中特别受欢迎。
在选型过程中,需要考虑以下因素:
- 精度要求 :不同场合对测量精度的要求不同,例如,对于飞机或航天器的导航,需要高精度IMU,而对于消费级应用,标准精度可能就足够了。
- 尺寸和重量 :小型轻量级的IMU更适合于小型无人机或手持设备。
- 接口类型 :常用接口包括I2C、SPI和UART等,选择与现有系统兼容的接口是必要的。
- 功耗 :对于电池供电的便携设备,低功耗是关键因素。
- 价格 :根据预算选择合适的价格范围内的传感器。
2.2 ROS话题通信机制
2.2.1 ROS话题的基本概念
ROS(Robot Operating System)是一种灵活的框架,用于编写机器人软件。它提供了一套消息传递库,允许节点之间以非阻塞方式通过消息进行通信。话题(Topic)是ROS消息传递系统的核心概念之一,是一种基于发布/订阅模型的通信机制。
在话题通信中,一个节点作为发布者(Publisher),负责发布消息到某个特定话题;另一个节点作为订阅者(Subscriber),则订阅这个话题,接收并处理消息。话题可以被多个节点订阅,这样就实现了节点之间的解耦和并行处理。这种机制大大提高了软件的模块化和复用性。
2.2.2 实现IMU话题发布和订阅
以IMU传感器为例,演示如何在ROS中实现话题发布和订阅。首先,确保IMU设备已经正确连接,并且有对应的ROS驱动程序运行。
- 话题发布 :当IMU传感器被初始化时,传感器驱动程序会自动创建一个话题并开始发布数据。用户可以通过以下命令查看所有可用话题和消息类型:
bash rostopic list # 显示所有话题 rostopic info /imu # 显示/imu话题的详细信息
- 话题订阅 :要订阅IMU数据,可以使用
rostopic echo命令,它将打印出指定话题的消息内容:
bash rostopic echo /imu
- 数据解析 :IMU传感器发布的是sensor_msgs/Imu类型的消息。以下是一个Python脚本示例,展示了如何在ROS中创建一个节点,订阅并解析IMU数据:
python #!/usr/bin/env python import rospy from sensor_msgs.msg import Imu def callback(data): rospy.loginfo("Received IMU data:") rospy.loginfo("Angular Velocity: x=%f y=%f z=%f (rad/s)" % (data.angular_velocity.x, data.angular_velocity.y, data.angular_velocity.z)) rospy.loginfo("Linear Acceleration: x=%f y=%f z=%f (m/s^2)" % (data.linear_acceleration.x, data.linear_acceleration.y, data.linear_acceleration.z)) def listener(): rospy.init_node('imu_listener', anonymous=True) rospy.Subscriber("/imu", Imu, callback) rospy.spin() if __name__ == '__main__': listener()
-
参数说明 :此脚本首先初始化一个ROS节点,然后创建一个订阅者来监听
/imu话题,并定义了一个回调函数callback用于处理接收到的IMU数据。 -
执行逻辑说明 :当IMU传感器发布数据到
/imu话题时,回调函数会被触发,节点打印出角速度和线加速度的测量值。
通过这种方式,我们可以接收并处理来自IMU传感器的数据,为进一步的处理和应用打下基础。
3. ROS中IMU数据处理与滤波
3.1 IMU数据的获取与解析
3.1.1 从ROS话题中获取IMU数据
在ROS环境中,IMU(惯性测量单元)传感器的数据可以通过话题(topics)进行实时传输和处理。话题是ROS中进程间通信的一种机制,它允许节点发布消息到特定的话题,并且其他节点可以订阅这些话题来接收消息。
首先,确保IMU传感器已经正确连接并且ROS能够识别。通常,IMU设备会作为一个硬件节点发布数据到一个特定的话题上,例如 /imu/data 。这个话题名称可能会根据IMU型号和ROS驱动有所不同。
可以通过以下命令查看系统中活跃的话题列表:
rostopic list
如果 /imu/data 话题存在于列表中,则说明IMU数据已经成功发布。使用以下命令订阅该话题,并查看发布的信息:
rostopic echo /imu/data
这将显示IMU数据的消息类型,通常是 sensor_msgs/Imu 类型。接下来,我们可以使用Python脚本等程序来订阅该话题,并对数据进行进一步的处理和解析。
3.1.2 IMU数据的格式与结构解析
sensor_msgs/Imu 消息类型包含了加速度计、陀螺仪和磁力计的数据。以下是一个典型的IMU数据消息的Python代码解析示例:
import rospy
from sensor_msgs.msg import Imu
def callback(data):
# 加速度计数据
acceleration = data.linear_acceleration
print("Acceleration: x=%f y=%f z=%f" % (acceleration.x, acceleration.y, acceleration.z))
# 陀螺仪数据
angular_velocity = data.angular_velocity
print("Angular Velocity: x=%f y=%f z=%f" % (angular_velocity.x, angular_velocity.y, angular_velocity.z))
# 磁力计数据
orientation = data.orientation
print("Orientation: x=%f y=%f z=%f w=%f" % (orientation.x, orientation.y, orientation.z, orientation.w))
if __name__ == '__main__':
rospy.init_node('imu_subscriber', anonymous=True)
rospy.Subscriber("/imu/data", Imu, callback)
rospy.spin()
这段代码首先导入了必要的ROS库,并定义了一个回调函数 callback ,该函数会在接收到新的IMU消息时被调用。回调函数中分别提取并打印了加速度计、陀螺仪和磁力计的数据。
通过这种方式,我们可以从IMU数据中获取实时的运动信息,为后续的数据处理和滤波打下基础。
3.2 IMU数据滤波技术
3.2.1 滤波理论基础
IMU传感器虽然能够提供丰富的动态数据,但这些数据往往伴随着噪声,直接使用这些数据进行应用会降低精度和可靠性。为了提取有用信号并抑制噪声,需要应用各种滤波算法。
滤波算法可以分为线性滤波和非线性滤波。常见的线性滤波算法包括简单的一阶滤波、二阶滤波以及更加复杂的卡尔曼滤波和扩展卡尔曼滤波。非线性滤波算法则有粒子滤波、无迹卡尔曼滤波等。
在使用滤波算法处理IMU数据时,需要理解每个算法的基本原理和适用场景。例如,简单的一阶滤波器适用于去除高频噪声,而卡尔曼滤波器则能够同时处理信号估计和噪声抑制,更适合复杂的动态系统。
3.2.2 实际应用中的滤波实现
在ROS中实现IMU数据的滤波,可以选择使用现有的ROS包,例如 robot_localization 包中的 ekf 节点,或者编写自定义的滤波器节点。
以下是一个使用 robot_localization 包中的 ekf 节点进行滤波处理的示例:
<filter name="ekf_filter_node">
<rosparam>
# 初始化参数
frequency: 60
num_state_vars: 15
# 指定状态变量的初始协方差
Q:
linear-acceleration-x: 0.01
linear-acceleration-y: 0.01
linear-acceleration-z: 0.01
angular-velocity-x: 0.01
angular-velocity-y: 0.01
angular-velocity-z: 0.01
# 定义观测模型
R:
linear-acceleration-x: 0.01
linear-acceleration-y: 0.01
linear-acceleration-z: 0.01
angular-velocity-x: 0.01
angular-velocity-y: 0.01
angular-velocity-z: 0.01
# 指定传感器到状态变量的转换矩阵
process_noise_covariance阵列:
- [ 1, 0, 0, 0, 0, 0 ]
- [ 0, 1, 0, 0, 0, 0 ]
- [ 0, 0, 1, 0, 0, 0 ]
- [ 0, 0, 0, 1, 0, 0 ]
- [ 0, 0, 0, 0, 1, 0 ]
- [ 0, 0, 0, 0, 0, 1 ]
</rosparam>
</node>
在 robot_localization 中,通过 <rosparam> 标签指定了滤波器的参数。这些参数包括观测模型、过程噪声协方差矩阵和状态变量的初始协方差矩阵等。配置完成后,需要将IMU话题发布到 ekf_filter_node ,以便滤波器可以处理数据。
通过这种配置,我们可以实现一个基本的IMU数据滤波处理流程,以提高数据的准确度和可靠性。对于特定的应用场景,可能还需要对滤波器的参数进行微调,或者实现自定义的滤波算法来满足特定需求。
4. rviz在ROS中的数据可视化应用
4.1 rviz基本使用方法
4.1.1 rviz界面布局和操作
rviz是ROS中用于2D/3D可视化工具,它可以显示传感器数据、机器人模型、地图、路径规划等。rviz在默认情况下会显示一个工具栏,一个视角栏(View Controls),一个显示列表(Displays)和一个状态栏(Status)。要开始使用rviz,需要先添加显示项(Displays),例如添加一个TF显示项可以用来查看机器人各部分的相对位置,添加一个Map显示项可以用来查看地图信息。
添加显示项的步骤如下:
- 点击工具栏上的加号(Add),这会打开一个对话框,让你选择要添加的显示类型。
- 选择你希望添加的显示类型,例如“TF”来查看坐标变换树。
- 点击OK按钮添加显示项。
- 在 Displays 列表中你可以看到刚才添加的项。点击它旁边的“小眼睛”图标,可以显示/隐藏该显示项。
操作rviz视角的步骤如下:
- 使用鼠标中键旋转视角。
- 使用鼠标左键和拖动进行视角平移。
- 滚动鼠标中键进行缩放。
- 可以设定多个视角并命名,方便切换查看。
4.1.2 将IMU数据可视化展示
要将IMU数据在rviz中可视化展示,首先需要确保你有IMU数据的ROS话题发布。IMU数据通常可以通过传感器直接获取,或者通过rosbag回放数据。确保rviz的Time选项设置为“Use Fixed Timestamp”或“Use Current Time”,并选择与IMU数据话题匹配的时间。
在rviz中添加IMU显示项步骤如下:
- 在Add对话框中选择“Imu”。
- 你可能需要配置IMU的Topic,这是IMU数据发布的ROS话题。如果你的IMU数据发布在名为
/imu的话题上,那么就选择这个话题。 - 在IMU display设置中,调整尺寸大小,可以使得在3D视图中的IMU更易于观察。
- 点击“OK”添加IMU显示项。
如果你有IMU数据的ROSbag文件,可以使用如下指令播放:
rosbag play your_imu_data.bag
然后使用rviz加载到播放中的数据流。这允许你在播放时看到IMU数据的实时可视化表示。
4.2 自定义rviz可视化
4.2.1 创建自定义显示插件
rviz允许用户创建自定义的显示插件,以展示特定类型的数据。自定义显示插件通常需要编译安装,因此必须拥有一定的C++编程经验。以下是创建rviz自定义显示插件的基本步骤:
- 创建一个新的ROS包,可以使用catkin_create_pkg命令。确保添加依赖项
rviz和pluginlib。
catkin_create_pkg my_rviz_plugin std_msgs rospy roscpp rviz pluginlib
-
在新建的ROS包中创建一个自定义的display插件类。这通常涉及到继承rviz的
Display类,并且实现必要的方法。 -
将你的插件作为可加载的插件进行配置。在你的ROS包中创建一个名为
plugin.xml的文件,声明插件的类型、名称和依赖项。 -
编译你的ROS包,确保插件被正确加载。
catkin_make
- 启动rviz并加载自定义插件。在rviz的Add对话框中,你应该能看到你的插件出现在显示类型列表中。
4.2.2 实现特定数据类型的可视化
实现特定数据类型可视化的步骤可能包括以下几点:
- 在ROS包中定义特定类型消息的数据结构。
- 创建可视化类,继承rviz的
Display类,并实现数据处理与渲染方法。 - 编写插件描述文件,将可视化类与rviz插件框架关联。
- 提供用户交互的接口,比如工具栏按钮、显示项参数等,以定制化用户体验。
- 在rviz中添加并使用你的自定义显示插件,展示特定数据类型的可视化结果。
为了演示自定义数据的可视化,以下是一个简单代码示例,展示如何实现一个简单的点云数据可视化插件:
#include <rviz/display.h>
#include <rviz/visualization.h>
#include <rviz/properties/color_property.h>
#include <rviz/default_plugin/color_property.h>
#include <rviz/default_plugin/pointcloud2_display.h>
namespace rviz_custom_plugin {
class MyPointCloudDisplay : public rviz::PointCloud2Display
{
public:
MyPointCloudDisplay()
{
// 构造函数,可以添加默认参数等
}
// 实现渲染函数
void update()
{
// 清除之前的点云数据
clear();
// 假设cloud_msg_是Pointcloud2类型的消息
for (int i = 0; i < cloud_msg_->points.size(); ++i)
{
// 点的索引
size_t index = i * cloud_msg_->point_step;
// 读取点的x, y, z坐标
float x = *reinterpret_cast<const float*>(&cloud_msg_->data[index]);
float y = *reinterpret_cast<const float*>(&cloud_msg_->data[index + sizeof(float)]);
float z = *reinterpret_cast<const float*>(&cloud_msg_->data[index + sizeof(float) * 2]);
// 将点添加到rviz中
rviz::Vector3 pt(x, y, z);
addPoint(pt);
}
}
};
} // namespace rviz_custom_plugin
//告诉rviz这个类是一个可显示的类
RVIZ_CUSTOM_PLUGIN(MyPointCloudDisplay, rviz_custom_plugin::MyPointCloudDisplay)
在上述示例中, MyPointCloudDisplay 类继承自rviz的 PointCloud2Display ,覆写了 update() 方法来渲染点云数据。创建一个RViz插件需要与ROS包一起进行编译。具体的过程可能涉及添加相应的CMakeLists.txt配置文件以确保所有依赖正确加载,并且插件能够被rviz识别。
请注意,以上代码只是一个简化的示例,真正的实现会更复杂,包括数据处理、错误检查以及与ROS消息交互的完整功能。
这个自定义的点云数据可视化插件可以处理特定格式的数据,并且能够将其以图形化的形式展示给用户。创建一个实用的自定义插件需要深入了解数据结构、ROS消息系统和rviz的API。
5. IMU数据校准方法
在任何精密系统中,传感器校准都是确保数据准确性和可靠性的关键步骤。IMU(惯性测量单元)传感器在诸多应用中,如机器人导航、姿态控制和增强现实等领域,都需要准确的校准以提供精确的测量。本章节将深入探讨IMU传感器的校准方法,并介绍如何使用ROS环境下的工具进行校准操作。
5.1 IMU传感器校准基础
5.1.1 校准的必要性和方法概述
IMU传感器包括加速度计、陀螺仪和磁力计,它们分别负责测量线性加速度、旋转和磁场。由于传感器的内部元件、制造过程、外部环境等因素,传感器输出可能会有偏差、噪声和非线性误差,这就需要通过校准来纠正。
校准的必要性在于:
- 消除偏差 :校准可以确定和消除系统误差,提高测量数据的准确性。
- 提高稳定性 :长期使用或环境变化可能引起传感器性能漂移,定期校准有助于维持稳定性能。
- 保证兼容性 :在多传感器系统中,确保数据一致性对算法的准确性至关重要。
IMU校准方法大致可以分为以下几种:
- 工厂校准 :在生产过程中进行的一次性校准,为传感器提供初始的校准参数。
- 实验室校准 :在受控环境中使用精密设备进行的详尽校准流程。
- 现场校准 :在传感器实际使用地点进行的校准,以便适应特定环境。
- 动态校准 :模拟传感器的动态工作环境,进行更为贴近实际应用的校准。
5.1.2 校准过程中的常见问题及解决
在进行IMU校准时,常常会遇到一些问题,以下列举几个常见问题及应对方法:
- 温度影响 :温度变化会引起传感器特性的改变。解决方法是采用温度补偿或者在不同温度条件下重复校准,获取校准参数的温度模型。
- 磁场干扰 :周围环境的磁场变化会影响磁力计的准确性。可以采用磁场校正方法,如使用差分全球定位系统(DGPS)提供参考磁场值。
- 动态误差 :在高速运动或高动态环境中,传感器误差可能加剧。可采用动态标定方法或选择具有高速响应特性的传感器。
5.2 校准工具与实际操作
5.2.1 使用ROS内置工具进行校准
ROS提供了多个内置工具用于IMU传感器的校准,其中较为常用的是 imu_tools 包。在ROS中,可以使用 imu_calibrator 节点进行校准。
该节点启动的步骤如下:
- 安装
imu_tools包:
sudo apt-get install ros-<rosdistro>-imu-tools
<rosdistro> 是你的ROS发行版名称,比如 melodic 、 noetic 。
- 运行
imu_calibrator节点,通常需要将IMU话题指定为输入:
rosrun imu_tools imu_calibrator __ns:/<your_sensor_namespace> /imu:=/your_imu_topic
将 <your_sensor_namespace> 和 /your_imu_topic 替换成实际使用的传感器命名空间和话题。
imu_calibrator 节点会请求用户将设备置于特定位置,并保存校准参数。
5.2.2 编写自定义校准脚本和程序
在某些情况下,可能需要编写自定义的校准脚本和程序以满足特定的需求,比如校准特定型号的传感器,或者在特殊条件下进行校准。
以下是使用Python和 sensor_msgs/Imu 消息类型进行校准的基本示例代码:
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Imu
from math import pi
def calibrate_imu(data):
# 假设设备已经被放置在正确位置,这里是处理数据的逻辑
# 提取数据,计算偏差和比例因子等
# 发布校准后的数据或保存校准参数
def main():
rospy.init_node('imu_calibrator_node', anonymous=True)
rospy.Subscriber("/imu", Imu, calibrate_imu)
rospy.spin()
if __name__ == '__main__':
main()
以上代码展示了创建一个ROS节点来订阅IMU数据,并在回调函数 calibrate_imu 中进行处理的框架。这里需要根据具体的校准算法来填充实现细节。
参数说明和代码逻辑分析
rospy.init_node():初始化ROS节点。rospy.Subscriber():订阅指定话题的IMU数据。calibrate_imu:回调函数,每当有新数据时被调用,负责处理IMU数据和执行校准过程。rospy.spin():使节点持续运行,等待回调函数被调用。
在编写自定义校准程序时,需要详细理解IMU传感器的内部工作原理及其误差模型,同时要熟悉ROS消息类型以及如何处理这些数据。通过分析传感器输出数据,可以确定偏差、噪声水平、比例因子等关键参数。这一步骤通常需要一定量的数据采集和数学分析,例如最小二乘法、卡尔曼滤波等数据处理算法。
校准是确保IMU传感器提供准确数据的关键步骤,而ROS提供了强大的工具和灵活性来辅助这一过程。通过上述工具和示例代码,可以实现基本的IMU校准。对于高级应用,开发自定义校准脚本可以提供更多的控制和优化空间。随着传感器技术的发展和应用的多样化,校准过程可能会不断演进和细化。在实际应用中,开发者应当不断评估并优化校准方法,以保证传感器数据的准确性和可靠性。
6. 多传感器数据融合技术
数据融合是现代机器人和自动化系统中的一个核心概念,它通过将来自多个源的数据结合起来以获得更准确、更可靠的信息。在本章节中,我们将深入探讨数据融合的基础理论,并展示如何在ROS环境中实现多传感器数据融合。
6.1 数据融合基础理论
数据融合是一个复杂的过程,它包括不同层次、不同阶段的处理。理解数据融合的基础理论是构建稳定、高效融合系统的第一步。
6.1.1 数据融合的概念和分类
数据融合,也称信息融合,是将来自多种源的观测数据和信息结合起来,以产生比单一数据源更准确、更完整的估计。数据融合通常应用于军事、航空航天、机器人技术以及环境监测等领域。
在多传感器系统中,融合处理通常分为三个层次:
- 低层次融合 :直接在原始数据层面上进行融合,通常用于处理传感器原始测量数据,如信号的直接合成。
- 中层次融合 :在特征层面上进行融合,处理来自各个传感器的特征提取结果。
- 高层次融合 :在决策层面上进行融合,处理各个传感器的决策结果,如对象识别、跟踪等。
6.1.2 数据融合算法的选取和应用
数据融合的算法多种多样,包括但不限于卡尔曼滤波器、粒子滤波器、Dempster-Shafer理论、贝叶斯网络等。每个算法都有其特点和适用场景。
选择合适的融合算法需要考虑以下因素:
- 传感器类型 :不同的传感器输出不同类型的数据,可能需要不同类型的融合算法。
- 数据类型 :数据是标量、向量还是矩阵,是确定的还是随机的。
- 时间同步 :多个传感器的数据是否需要时间对齐。
- 计算资源 :算法的计算复杂度是否符合实际硬件的计算能力。
6.2 实现多传感器数据融合
在ROS中实现多传感器数据融合需要一定的编程技能,以及对ROS工具和消息系统的深入理解。
6.2.1 在ROS中集成多个传感器
在ROS环境中,首先需要集成多个传感器。这一部分涉及硬件选择、驱动配置以及话题订阅。传感器的选择应基于应用场景的特定需求,例如使用视觉传感器、IMU、激光雷达等。
一旦传感器安装并配置好,接下来是编写ROS节点,使其订阅各个传感器的数据话题。在ROS中,不同传感器的数据通常以话题的形式发布,因此,融合的第一步是将这些话题的数据读取到融合节点中。
#!/usr/bin/env python
import rospy
from sensor_msgs.msg import Imu
from geometry_msgs.msg import TwistWithCovarianceStamped
from std_msgs.msg import Header
def imu_callback(data):
# 处理IMU数据
pass
def lidar_callback(data):
# 处理激光雷达数据
pass
def main():
rospy.init_node('sensor_fusion_node', anonymous=True)
# 订阅IMU数据话题
rospy.Subscriber('/imu/data', Imu, imu_callback)
# 订阅激光雷达数据话题
rospy.Subscriber('/lidar/data', TwistWithCovarianceStamped, lidar_callback)
try:
rospy.spin()
except KeyboardInterrupt:
print("Shutting down ROS sensor fusion node.")
if __name__ == '__main__':
main()
6.2.2 开发融合算法和处理流程
开发融合算法和处理流程是数据融合中最重要的部分。在ROS中,可以使用多种编程语言来实现算法,包括Python和C++。算法开发应遵循以下步骤:
- 初始化 :配置融合算法参数,如状态估计器的初始值等。
- 数据同步 :由于不同传感器可能以不同的频率输出数据,因此需要同步数据时间戳。
- 数据转换 :将数据从传感器特定的格式转换为融合算法需要的格式。
- 数据融合 :使用选择的融合算法将数据进行融合处理。
# 示例代码,展示如何使用卡尔曼滤波器进行数据融合
from filterpy.kalman import KalmanFilter
def kalman_fusion(measurement):
# 初始化卡尔曼滤波器
kf = KalmanFilter(dim_x=4, dim_z=3)
kf.F = np.array([[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]])
kf.H = np.array([[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0]])
kf.Q = np.array([[0, 0, 0, 0],
[0, 0, 0, 0],
[0, 0, 0, 0],
[0, 0, 0, 0]])
kf.R = np.array([[1, 0, 0],
[0, 1, 0],
[0, 0, 1]])
kf.x = np.array([0., 0, 0, 0])
# 使用测量数据更新卡尔曼滤波器
kf.predict()
kf.update(measurement)
# 返回滤波后的状态估计值
return kf.x
融合算法的开发需要对数据模型、噪声特性等有深入理解。此外,还需要对融合算法进行反复的测试和调整,以确保融合结果的准确性和稳定性。
在多传感器数据融合的实现过程中,一个常见的挑战是如何处理时间同步问题。不同传感器可能以不同的频率采集数据,或者受到网络延迟的影响,这要求我们对数据进行时间校准,确保融合过程的准确性。
6.2.3 融合系统评估与优化
融合系统的评估与优化是一个持续的过程。评估融合系统性能的方法通常包括:
- 静态评估 :分析算法在已知数据集上的表现,包括误差分析、稳定性评估等。
- 动态评估 :在真实或仿真的动态环境中测试算法的性能,包括鲁棒性、实时性等。
在评估的基础上,我们可以对算法进行优化,比如调整融合算法参数、改进数据同步机制、优化传感器配置等。优化的目标是提高系统的整体性能,包括提高融合数据的准确性和可靠性。
本章节介绍了多传感器数据融合的基础理论,并通过实际代码示例展示了如何在ROS环境中实现数据融合。通过理解本章内容,您将能够应用这些技术构建更加稳健和高效的数据处理系统。
7. imu_tools_rviz_ROS_项目实战
7.1 项目规划与设计
7.1.1 项目目标和应用场景
在开始设计imu_tools_rviz_ROS项目之前,我们需要明确项目的最终目标及预期的应用场景。项目的目标是通过ROS平台整合IMU传感器数据,利用rviz工具进行实时数据可视化,并提供一个强大的数据分析和调试平台。这一项目特别适合需要实时监控和调整机器人或移动设备姿态的场景,例如自动驾驶汽车、无人机、机器人导航以及工业自动化等领域。
7.1.2 系统架构和功能模块划分
系统架构设计是项目实施前的重要步骤,我们的imu_tools_rviz_ROS系统将包含以下功能模块:
- 数据采集模块 :负责从IMU传感器接收数据,并进行初步处理。
- 数据处理模块 :包含滤波算法和数据转换工具,以提供准确的IMU数据。
- rviz可视化模块 :利用ROS rviz工具将处理后的IMU数据以图形化的方式展示。
- 数据校准模块 :用于在采集数据前或实时调整IMU数据的准确性。
- 用户交互模块 :提供用户操作界面,允许用户进行系统配置和调整。
7.2 项目实施与测试
7.2.1 开发环境的搭建和配置
本项目的开发依赖于ROS环境,我们首先需要搭建一个兼容ROS版本的开发环境。以ROS Melodic为例,开发环境的搭建步骤如下:
- 更新系统软件源并安装ROS Melodic及其依赖项。
- 创建ROS工作空间并初始化。
- 克隆imu_tools_rviz_ROS项目到工作空间,并编译安装。
示例代码:
# 更新软件包列表
sudo apt-get update
# 安装ROS Melodic
sudo apt-get install ros-melodic-desktop-full
# 创建ROS工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
# 克隆项目
cd ~/catkin_ws/src
git clone https://github.com/user/imu_tools_rviz_ROS.git
# 编译项目
cd ~/catkin_ws
catkin_make
7.2.2 功能模块的编码与实现
在开发环境中配置完毕后,接下来是各个功能模块的编码实现过程。其中,数据采集模块可能包含以下代码片段:
#include <ros/ros.h>
#include <sensor_msgs/Imu.h>
void IMUCallback(const sensor_msgs::Imu::ConstPtr& msg)
{
// 处理接收到的IMU数据
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "imu_listener");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("imu_topic", 1000, IMUCallback);
ros::spin();
return 0;
}
7.2.3 系统集成与性能测试
完成所有模块的编码后,我们将进行系统集成。在集成过程中,我们需要注意各模块之间的数据交互和协作。
性能测试的目的是确保imu_tools_rviz_ROS系统能够高效稳定地运行。性能测试通常包括以下方面:
- 功能测试 :确保每个功能模块按预期工作,如数据采集是否准确,数据可视化是否正确展示等。
- 压力测试 :模拟高负载情况下系统的响应时间及稳定性。
- 兼容性测试 :在不同的硬件配置下测试系统兼容性。
在性能测试过程中,我们可能会使用以下命令行工具来获取系统性能数据:
# ROS系统性能监控
rostopic hz /imu_topic
7.2.4 故障排除
在开发和测试阶段,可能会遇到各种问题,如数据丢失、处理速度慢、可视化异常等。对于这些问题,我们需要逐一排查和解决。常见的故障排查方法包括:
- 日志分析 :检查roscore和各个节点的运行日志。
- 系统资源监控 :使用top、htop或类似工具监控CPU和内存使用情况。
- 网络通信检查 :使用rosnode list和rostopic list等命令检查节点和话题的连接状态。
在实际的故障排查中,我们可能会使用以下指令:
# 检查节点列表
rosnode list
# 检查话题列表
rostopic list
# 查看节点状态
rosnode info /node_name
# 监控话题的发布频率
rostopic hz /topic_name
这些步骤确保imu_tools_rviz_ROS项目在部署到生产环境之前能够达到最佳性能。通过精心规划、开发、集成测试和故障排查,最终可以交付一个高性能且用户友好的ROS应用程序。
简介:本项目介绍如何在ROS系统中处理和可视化IMU数据。IMU是一种集成了加速度计、陀螺仪和磁力计的传感器,能够提供机器人三维运动状态。项目涵盖了IMU数据的获取、滤波处理、以及在rviz工具中进行数据可视化,从而帮助开发者理解和调试机器人的动态行为。此外,还包括IMU数据的校准过程,以及可能的多传感器数据融合技术,为ROS开发者提供了一套完整的IMU数据利用方案。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐

 27
27 0
0- 0



 已为社区贡献34条内容
已为社区贡献34条内容

所有评论(0)