
Tiny6410 Linux开发全攻略
Linux是一个成熟且功能强大的开源操作系统,它广泛应用于服务器、桌面电脑、嵌入式设备等多个领域。Linux的核心是内核,它负责管理系统的硬件资源,提供与硬件交互的接口,同时也提供了一系列基本的文件操作、网络通信等服务。Tiny6410是基于ARM11内核的开发板,它提供了一个性能均衡且功能丰富的硬件平台,适用于学习、研究和产品原型设计。它集成了多种接口和外设,支持广泛的扩展模块。

简介:《Tiny6410 Linux开发指南》是一本针对ARM926EJ-S内核微处理器平台的Linux系统开发教程。书中详细介绍了如何在Tiny6410平台上搭建开发环境、定制Linux内核、构建根文件系统、开发设备驱动、配置Bootloader和编写应用程序,从而实现复杂嵌入式应用的开发。教程强调理论与实践相结合,适合嵌入式系统设计工程师学习和参考。 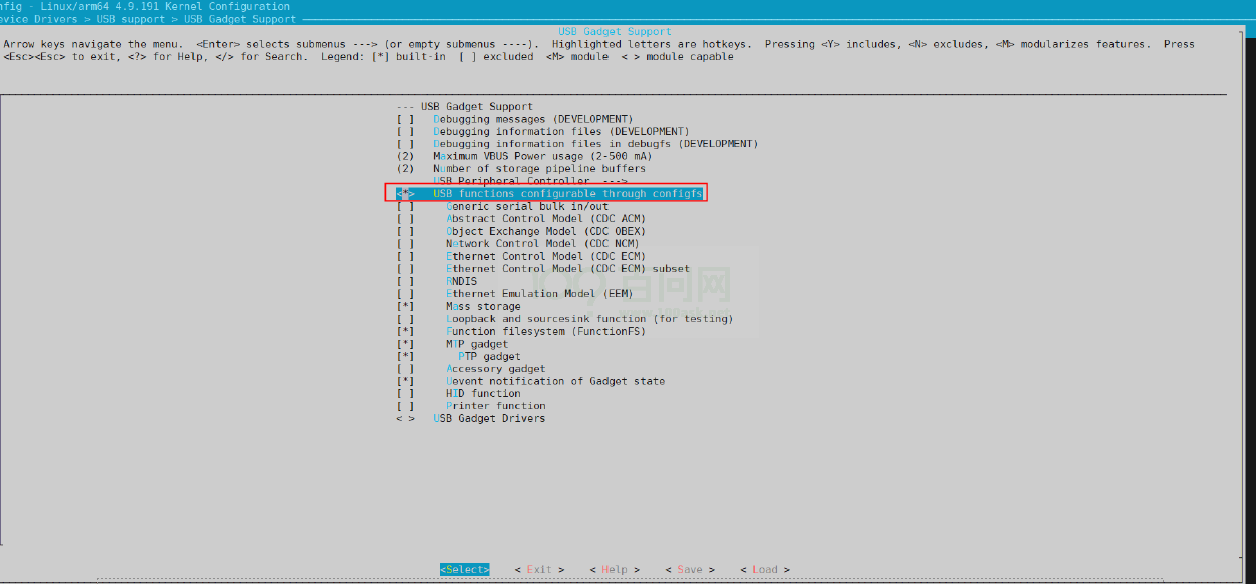
1. Linux系统基础知识
1.1 Linux操作系统简介
Linux是一个成熟且功能强大的开源操作系统,它广泛应用于服务器、桌面电脑、嵌入式设备等多个领域。Linux的核心是内核,它负责管理系统的硬件资源,提供与硬件交互的接口,同时也提供了一系列基本的文件操作、网络通信等服务。
1.2 Linux文件系统和目录结构
Linux的文件系统是层次化结构,以根目录“/”开始,所有其他目录和文件都从这个根目录衍生出来。这种结构使得文件管理清晰有序,每个目录都承担着特定的角色,例如 /bin 目录包含了用户用的基本命令,而 /usr 目录包含了用户程序和数据。
1.3 Linux命令行基础
对于IT专业人士来说,掌握Linux命令行是基础技能。命令行提供了一种高效的操作方式,可以执行文件管理、系统管理、网络配置等任务。一些基础命令如 ls 、 cd 、 cp 、 mv 、 grep 、 find 等都是必须熟悉的。高级用户会利用管道、重定向、文本处理工具等来进行复杂的任务处理和数据分析。
2.1 Tiny6410平台概述
2.1.1 平台架构特点
Tiny6410是基于ARM11内核的开发板,它提供了一个性能均衡且功能丰富的硬件平台,适用于学习、研究和产品原型设计。它集成了多种接口和外设,支持广泛的扩展模块。这些特点为开发者提供了极大的灵活性,使得Tiny6410可以适应不同的应用场景,例如嵌入式系统、物联网(IoT)设备、消费电子产品等。
2.1.2 硬件组成解析
Tiny6410的核心是Samsung S3C6410处理器,具有133 MHz到533 MHz的主频。该处理器集成了一个64/32位的ARM1176JZF-S核心,并提供了一系列丰富的外设支持,比如LCD控制器、触摸屏接口、以太网控制器、USB接口、多媒体加速器、摄像头接口等。
接下来,我们将进一步探讨如何搭建开发环境,以及安装和配置基本软件工具。
2.2 Tiny6410开发环境搭建
2.2.1 开发板与PC机的连接
要开始在Tiny6410开发板上工作,首先要确保开发板和PC机之间可以通过串口、以太网或其他接口连接。串口用于命令行通信和调试输出,是最基本的连接方式。以太网连接则是为了在开发过程中实现网络通信和远程访问。
2.2.2 基本软件工具安装与配置
开发Tiny6410平台上的应用程序和系统需要安装一些基本的软件工具,其中包括交叉编译器、用于烧写固件的工具和串口通信程序。交叉编译器用于在PC上编译出适用于ARM平台的可执行文件。常见的交叉编译器有ARM Linux GCC。
安装这些工具之后,需要进行一些配置,比如设置环境变量,确保系统可以识别交叉编译器的路径。这样,在后续的开发过程中,就不需要指定交叉编译器的完整路径。
接下来,我们将了解如何配置交叉编译工具链,以准备交叉编译环境。
3.1 交叉编译工具链概述
3.1.1 交叉编译的概念
交叉编译是指在一种架构的计算机上为另一种不同的架构编译代码的过程。这在嵌入式开发中非常常见,因为嵌入式设备往往缺乏足够的资源来直接编译代码。交叉编译可以提高效率,允许开发者使用性能更强的主机来编译针对嵌入式系统的程序。
3.1.2 选择合适的交叉编译工具链
选择交叉编译工具链时,需要考虑目标平台的处理器架构和所使用的操作系统。例如,若目标平台是基于ARM架构,并且运行Linux操作系统,那么就需要找到支持ARM架构的Linux交叉编译器。常见的选择有arm-linux-gcc和aarch64-linux-gnu-gcc等。
交叉编译器一般会包含一整套工具链,包括编译器、链接器、库文件和工具链的其他组件。确保这些组件的版本兼容,是成功交叉编译的前提。
3.2 交叉编译环境的配置与使用
3.2.1 环境变量的设置
在开始交叉编译之前,需要设置好环境变量,特别是 PATH 变量,以确保系统能够找到交叉编译器的可执行文件。可以通过命令行来设置环境变量:
export PATH=$PATH:/path/to/cross/compile/tools/bin
其中 /path/to/cross/compile/tools/bin 是交叉编译工具链的二进制文件夹路径。设置好之后,可以使用 which arm-linux-gcc 这样的命令来检查是否设置正确。
3.2.2 编译选项和参数
在配置交叉编译环境时,还需要注意编译选项和参数。例如,编译器需要知道目标平台的架构,这通常通过设置特定的宏定义或编译标志来实现。例如:
arm-linux-gcc -march=armv7-a -mfpu=neon -mfloat-abi=softfp ...
这个命令指定了目标架构为ARMv7-A,使用NEON浮点单元,并采用软浮点库。
以下是交叉编译器的使用实例:
arm-linux-gcc -o output_file input_file.c
这个命令将会编译 input_file.c 文件,生成 output_file 可执行文件,适用于ARM平台。
接下来,我们将了解如何设置和配置Linux内核,以便在Tiny6410平台上运行。
4.1 Linux内核配置基础
4.1.1 内核配置选项解析
Linux内核是运行在Tiny6410开发板上的操作系统核心。它由许多模块组成,每种模块负责特定的功能。在编译内核之前,需要对内核进行配置。这通常通过一个文本配置文件来实现,其中定义了内核模块的启用或禁用选项,以及各种硬件和系统的配置参数。
这些配置选项通常可以在内核源码的 arch/arm/configs 目录下找到对应的配置文件,例如 tiny6410_defconfig 是专为Tiny6410开发板提供的默认配置文件。
4.1.2 常用内核配置方法
有几种方法可以配置Linux内核:
-
使用默认配置:
sh make tiny6410_defconfig这将为Tiny6410开发板设置默认配置。 -
使用图形化配置工具:
sh make menuconfig这个命令会启动一个基于文本的菜单界面,开发者可以通过它来启用或禁用内核中的特定功能和模块。 -
使用命令行界面:
sh make xconfig类似于make menuconfig,但是使用了一个图形化的用户界面,需要运行在X Window系统之上。
接下来,我们将深入了解Linux内核编译流程。
4.2 Linux内核编译流程
4.2.1 编译前的准备工作
在开始编译Linux内核之前,需要确保已经下载了适合Tiny6410的内核源码,并且已经根据目标平台配置好内核。此外,还要检查是否已经安装了交叉编译工具链,以及确保所有必要的编译依赖包都已经安装。
接下来的步骤通常包括清理旧的编译结果,以防旧文件影响编译过程:
make clean
4.2.2 编译内核和模块
开始编译内核时,可以使用下面的命令:
make ARCH=arm CROSS_COMPILE=arm-linux- zImage modules
这个命令会生成一个压缩的内核映像 zImage 和内核模块。 ARCH=arm 指定了架构为ARM, CROSS_COMPILE 指定了交叉编译器的前缀。
编译完成后,通常会得到一个内核映像文件和多个模块文件。这些文件需要被烧写到Tiny6410开发板的合适位置上,以便启动和使用。
现在,我们已经了解了如何设置交叉编译工具链和编译Linux内核。接下来,我们将介绍如何构建和定制根文件系统。
5.1 根文件系统概念与结构
5.1.1 根文件系统的作用和组成
根文件系统是Linux操作系统的重要组成部分,它提供了系统的初始化、文件管理、设备访问和用户接口等功能。根文件系统可以是只读的,也可以是可读写的,取决于具体的应用需求。
在Tiny6410开发板上,根文件系统通常包括以下组件:
- Bootloader: 负责初始化硬件,加载操作系统。
- Kernel: 操作系统的核心。
- System libraries: 提供系统调用和功能实现。
- User applications: 定制的应用程序。
- Device files: 对硬件设备的抽象。
5.1.2 文件系统类型和选择
有多种文件系统可供选择,比如ext2、ext3、ext4、JFFS2、YAFFS2等。选择文件系统时需要考虑目标平台的需求,如需要的性能、是否需要日志记录、是否需要支持只读或可擦写存储等。
例如,如果需要频繁写入,可以选择支持快速写入操作的YAFFS2文件系统。如果是在闪存上运行,JFFS2可能是更好的选择,因为它专门为闪存优化。
5.2 构建和定制根文件系统
5.2.1 利用BusyBox构建根文件系统
BusyBox是一个集成了许多UNIX工具的单一可执行文件。它对于嵌入式设备来说非常有用,因为它大大减少了所需的空间。
构建BusyBox的基础文件系统可以遵循以下步骤:
- 下载BusyBox源码并解压。
- 使用
make menuconfig配置BusyBox。 - 编译并安装 BusyBox:
sh make ARCH=arm CROSS_COMPILE=arm-linux- install编译完成后,会生成_install目录,这就是根文件系统的基础结构。
接下来,我们将了解如何使用BusyBox创建一个简单的根文件系统。
mkdir -p rootfs/bin
cp _install/* rootfs/bin/
这段命令会将BusyBox的可执行文件复制到新创建的根文件系统目录中。然后,可以使用以下命令查看生成的文件系统内容:
find rootfs | cpio -o -H newc > ../rootfs.img
上面的命令创建了一个名为 rootfs.img 的压缩映像,该映像可以被烧写到开发板上使用。
5.2.2 文件系统的挂载和配置
将根文件系统烧写到开发板上后,需要挂载文件系统,以便从中启动。挂载是通过Bootloader实现的。Bootloader在启动时将根文件系统从存储介质挂载到内存中。这允许Linux内核访问根文件系统中的文件,并且开始启动过程。
具体的挂载过程和配置取决于使用的Bootloader。例如,使用U-Boot时,可能需要编辑其环境变量,设置根文件系统的挂载点和类型。
setenv bootargs console=ttySAC0,115200 root=/dev/mmcblk0p2 rw rootfstype=ext4 init=/linuxrc
以上命令设置了引导参数,指定了串口、根文件系统的位置、文件系统类型和初始执行的程序。
至此,我们已经介绍了交叉编译工具链和Linux内核的配置与编译,以及如何构建和定制根文件系统。接下来,我们将深入探讨设备驱动开发实践。
6.1 Linux设备驱动基础
6.1.1 设备驱动的作用与分类
在Linux系统中,设备驱动是连接内核和硬件设备的中间件。它为硬件设备提供了访问接口,使得上层应用程序可以通过标准的系统调用来控制硬件。设备驱动分为字符设备驱动、块设备驱动和网络设备驱动等。
- 字符设备驱动: 以字符为单位读写数据,不支持随机访问,如键盘、鼠标等。
- 块设备驱动: 以数据块为单位进行数据读写,支持随机访问,如硬盘、固态硬盘等。
- 网络设备驱动: 提供网络通信功能,如以太网卡、无线网卡等。
6.1.2 驱动开发流程概述
驱动开发流程通常包括以下步骤:
- 研究硬件规格: 了解目标硬件的技术手册和数据表。
- 实现驱动代码: 根据硬件规格编写代码。
- 编译和测试驱动: 在目标平台上编译和运行驱动,进行调试。
- 验证驱动功能: 确认驱动程序是否正确处理了各种硬件操作。
- 性能优化: 对驱动进行性能分析和优化,提高其效率。
6.2 设备驱动开发实例分析
6.2.1 字符设备驱动开发
字符设备驱动开发一般从注册字符设备开始。下面是一个简单的字符设备驱动注册的例子:
#include <linux/cdev.h>
#include <linux/fs.h>
static dev_t first; // Global variable for the first device number
static struct cdev c_dev; // Global variable for the character device structure
static int __init char_driver_init(void) {
// Allocate a major number for the device
if (alloc_chrdev_region(&first, 0, 1, "char_device") < 0) {
return -1;
}
// Create associated cdev structure
cdev_init(&c_dev, &fops);
if (cdev_add(&c_dev, first, 1) == -1) {
unregister_chrdev_region(first, 1);
return -1;
}
return 0;
}
这里我们使用 alloc_chrdev_region() 函数分配了一个主设备号,然后通过 cdev_init() 初始化字符设备结构体,并通过 cdev_add() 将其添加到系统中。
6.2.2 块设备和网络设备驱动
块设备和网络设备驱动开发涉及更复杂的概念,包括缓存管理、请求队列处理和中断处理等。由于篇幅限制,我们无法深入每一个细节,但是下面是一个块设备驱动开发中常见的请求队列初始化的示例:
#include <linux/blkdev.h>
#include <linux/genhd.h>
static struct request_queue *Queue;
static int char块设备请求队列初始化(struct gendisk *gd, fmode_t mode) {
Queue = blk_init_queue(do_char块设备_request, &card->lock);
if (Queue == NULL) {
return -ENOMEM;
}
blk_queue坚硬性(Queue, char块设备坚硬性);
blk_queue_bounce_limit(Queue, BLK_BOUNCE_ANY);
blk_queue_max_segments(Queue, MAX_segments);
return 0;
}
以上代码展示了如何初始化一个请求队列,并将一个请求处理函数 do_char块设备_request 与之关联。
网络设备驱动则需要实现一组net_device_ops结构体中的函数,来处理网络数据包的发送、接收、开启和关闭等功能。
至此,我们已经介绍了一些基本的设备驱动开发知识。接下来,我们将深入了解Bootloader的工作原理及配置。
7.1 Bootloader的作用与分类
7.1.1 Bootloader基本概念
Bootloader是一个在操作系统内核运行之前运行的小程序,它的主要任务是初始化硬件设备,设置内存空间,然后加载操作系统的内核到内存中并执行。这是启动过程的第一步,对于任何基于Linux的系统都至关重要。
7.1.2 常见Bootloader介绍
U-Boot是目前广泛使用的Bootloader之一。它支持多种架构,并且配置灵活,支持从多种设备启动系统。U-Boot可以通过网络、USB、SD卡等多种方式加载内核映像和根文件系统。
7.2 U-Boot配置与使用
7.2.1 U-Boot的获取与编译
获取U-Boot源码通常是从其官方网站或者项目的Git仓库中克隆。编译U-Boot需要首先设置交叉编译环境,然后执行如下命令:
make tiny6410_config
make ARCH=arm CROSS_COMPILE=arm-linux-
这样就会编译出适用于Tiny6410的U-Boot固件。
7.2.2 U-Boot的环境变量设置与烧写
编译完成后,需要在U-Boot环境中设置正确的启动参数,以便引导内核映像和根文件系统:
setenv bootargs console=ttySAC0,115200 root=/dev/mmcblk0p2 rw rootfstype=ext4 init=/linuxrc
setenv bootcmd 'fatload mmc 0 0x30000000 zImage; bootz 0x30000000'
以上命令设置了引导参数,并定义了加载内核映像的命令。
接下来,将U-Boot烧写到开发板的Flash存储器中:
烧写工具烧写U-Boot固件到开发板指定地址
至此,我们已经了解了如何获取和编译U-Boot,并配置环境变量以烧写固件。接下来,我们将探讨应用程序开发流程。
8.1 应用程序开发环境搭建
8.1.1 开发语言与工具选择
应用程序开发环境的搭建通常包括选择合适的开发语言和工具。对于Linux平台,常用的语言包括C/C++、Python、Java等。基于效率和性能考虑,C/C++是编写系统软件和性能敏感型应用的首选语言。
开发工具通常包括编译器、调试器和版本控制系统等。对于交叉编译,常用的编译器有GCC、Clang等,调试器通常使用GDB,并且可以通过GDB的远程调试功能来调试目标平台上的程序。
8.1.2 跨平台开发考虑
跨平台开发需要考虑到不同平台的差异性。这些差异可能包括不同的系统调用、不同的硬件架构和不同的编译器行为。使用跨平台库和工具,比如Qt、SDL等,可以帮助开发者减少这些差异性带来的工作量。
8.2 应用程序的调试与优化
8.2.1 常见调试工具和方法
常用的调试方法包括使用GDB、printf调试、性能分析工具如Valgrind等。使用GDB进行远程调试时,可以通过网络连接到目标开发板,并设置断点、单步执行、查看变量等。
8.2.2 代码优化技巧与实践
代码优化不仅仅是为了提高运行速度,还包括减少内存使用、提高电源效率和减少开发成本等方面。一些常见的优化技巧包括算法优化、循环优化、减少函数调用开销、使用适当的数据结构和内存分配策略等。
在实际开发中,可以使用分析工具(如gprof、oprofile)来识别瓶颈并进行优化。
现在,我们已经介绍了从驱动开发到应用程序开发的整个过程。接下来,我们将汇总开发过程中遇到的常见问题,并分享一些高效调试的技巧和经验。
9.1 开发过程中常见问题汇总
9.1.1 环境配置错误排查
环境配置错误是开发过程中常见的问题之一。排查这类问题时,需要仔细检查编译器路径、环境变量、依赖包是否正确安装和配置。常见的排查命令包括 echo $PATH 、 gcc --version 等。
9.1.2 编译与链接错误分析
编译和链接错误通常会给出错误信息,包括错误的类型和出现的位置。通过阅读和理解错误信息,可以定位问题所在。例如,找不到头文件的错误可以通过检查 #include 路径来解决;链接错误可能需要检查库文件的路径是否正确。
9.2 高效调试技巧与经验分享
9.2.1 调试工具的使用技巧
使用调试工具时,掌握一些技巧可以大大提高调试效率。比如,可以使用GDB的批量命令文件来自动化常见的调试任务。在GDB中,可以使用 source 命令来执行一个包含调试命令的脚本文件。
9.2.2 调试经验与案例分析
调试经验的积累可以通过分析历史案例来完成。分享失败的案例和成功的案例,不仅可以帮助新手快速了解调试的常见问题,还可以提供解决问题的思路和方法。例如,通过检查系统日志文件,可能可以发现服务崩溃的原因。
至此,我们已经涵盖了从Linux系统基础到开发流程和常见问题解决的全面内容。希望这些内容能够帮助您更深入地理解Linux系统及其在嵌入式开发中的应用。
3. 交叉编译工具链设置
交叉编译工具链是嵌入式开发中的一个关键组件,它允许开发者在一个平台上编译程序,而这些程序将在另一个平台上运行。本章将详细探讨交叉编译工具链的概念、配置和使用,为嵌入式系统的开发打下坚实的基础。
3.1 交叉编译工具链概述
3.1.1 交叉编译的概念
交叉编译(Cross-compilation)是一个编译过程,它生成的目标代码不是在编译它的机器上运行,而是在另一台具有不同处理器架构的机器上运行。在嵌入式系统开发中,由于目标硬件资源有限,通常会使用一个功能更强大的宿主机(如x86架构的PC)来进行交叉编译。
交叉编译工具链包括编译器、汇编器、链接器以及其他相关工具,它们共同协作,生成针对特定目标架构的可执行文件。例如,一个针对ARM架构的交叉编译器会生成能够在ARM处理器上运行的代码,而生成这些代码的操作是在x86架构的宿主机上完成的。
3.1.2 选择合适的交叉编译工具链
选择合适的交叉编译工具链对于嵌入式开发至关重要。合适的工具链应该满足以下条件:
- 支持目标硬件平台的处理器架构。
- 包含所有必要的工具,例如编译器、链接器、调试器等。
- 提供足够的库支持,这些库要与目标硬件兼容。
- 跟上最新的硬件平台和软件标准。
例如,对于ARM架构,常用的交叉编译工具链有GNU Compiler Collection(GCC)的arm-linux-gnueabi和arm-linux-gnueabihf。
3.2 交叉编译环境的配置与使用
3.2.1 环境变量的设置
环境变量配置是交叉编译环境设置的关键步骤。通过设置 CC 、 CXX 、 LD 、 AR 、 AS 等环境变量,指明使用交叉编译器和相关工具的路径,以便系统能够找到这些工具链。
export PATH=/path/to/cross-compiler/bin:$PATH
export CROSS_COMPILE=arm-linux-gnueabihf-
上述命令设置了交叉编译器的路径,并定义了一个前缀变量 CROSS_COMPILE ,以便于后续使用。
3.2.2 编译选项和参数
在编译项目时,需要设置正确的编译选项和参数以确保代码能在目标平台上正确运行。这些选项包括处理器架构、浮点支持、C++异常支持等。
例如,编译一个C++项目时的参数可能如下:
arm-linux-gnueabihf-g++ -march=armv7-a -mfpu=neon -mfloat-abi=hard -O2 -o output_file source_file.cpp
这个命令告诉交叉编译器使用ARMv7-A架构,启用NEON协处理器进行浮点运算,并设置严格的优化级别。
3.2.3 示例:编译简单的C程序
为了更具体地说明交叉编译的过程,下面将展示如何使用交叉编译工具链编译一个简单的C程序。假设我们有一个名为 hello.c 的源文件,我们希望编译它以便在ARM硬件上运行。
// hello.c
#include <stdio.h>
int main() {
printf("Hello, World!\n");
return 0;
}
编译这个程序的步骤如下:
arm-linux-gnueabihf-gcc -o hello hello.c
使用上述命令,交叉编译器 arm-linux-gnueabihf-gcc 会生成一个名为 hello 的可执行文件。接下来,你可以使用 file 命令来确认这个可执行文件的架构:
file hello
输出应该类似于:
hello: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV), dynamically linked, interpreter /lib/ld-linux.so.3, for GNU/Linux 3.2.0, BuildID[sha1]=703535c261e5132f162e8f00e2e2a5f0e58926a4, not stripped
这表明 hello 是一个针对ARM架构的32位ELF可执行文件。
交叉编译工具链的设置是嵌入式系统开发的基石之一。正确配置和使用工具链可以确保开发者在效率和性能上都取得最佳的结果。在接下来的章节中,我们将继续探讨Linux内核配置与编译,以深入理解嵌入式系统开发的下一个重要步骤。
4. Linux内核配置与编译
4.1 Linux内核配置基础
Linux内核是Linux操作系统的心脏,它负责管理系统的硬件资源,提供系统服务,以及保证系统稳定运行。理解内核配置是进行系统开发的基础,也是构建定制化Linux系统不可或缺的一步。
4.1.1 内核配置选项解析
Linux内核配置涉及大量的选项,每个选项都对应着内核的一个功能。对于开发人员来说,能够理解这些选项,并根据实际需要做出选择是至关重要的。内核选项通常可以分为以下几类:
- Code maturity level options :这一类选项通常涉及内核的成熟度,如是否包含试验性功能。
- Processor type and features :用于配置CPU的特定特性,如是否开启对多核心支持等。
- Loadable module support :配置模块支持,模块化内核允许动态加载和卸载模块,提供了更高的灵活性。
- Device Drivers :这是最庞大的分类之一,涉及各式各样的硬件驱动支持。
选择和配置这些选项通常依赖于特定硬件平台的需要以及开发者的具体需求。因此,深入分析每项配置对于定制内核至关重要。
4.1.2 常用内核配置方法
内核配置的方法有很多种,常见的有:
- make menuconfig :以菜单形式展示配置选项,适合有图形界面的环境。
- make config :逐个提问配置选项,适合脚本自动化配置。
- make xconfig :使用Qt工具作为界面,适合对图形界面比较熟悉的操作。
在选择配置方法时,应考虑实际开发环境和个人偏好。例如,开发者可能会喜欢在脚本中使用 make config 来自动化整个配置过程,以便快速适应不同的开发环境。
4.2 Linux内核编译流程
Linux内核编译流程比配置更为直接,但仍然需要细致的步骤来确保编译过程顺利进行。
4.2.1 编译前的准备工作
编译前的准备工作包括确保交叉编译工具链已经安装好并且配置正确。还需要确认内核源码树是最新版本,以及所有必要的依赖项都已安装。准备工作完成后,可以创建一个特定于你的硬件平台的编译环境:
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- defconfig
上述命令中, ARCH 指定了目标架构, CROSS_COMPILE 指定了交叉编译工具链的前缀。
4.2.2 编译内核和模块
在配置好内核选项后,就可以开始编译内核了。首先编译内核主体:
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- -j$(nproc)
之后,如果之前已经配置了模块支持,需要编译这些模块:
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- modules_install INSTALL_MOD_PATH=<rootfs_path>
其中 <rootfs_path> 是根文件系统的路径,模块将被安装在这个位置。
在编译过程中, -j$(nproc) 参数允许利用多核处理器进行并行编译,提高编译速度。此外,如果遇到任何错误,应当仔细检查错误信息并解决,这通常涉及到内核依赖或交叉编译工具链的问题。
4.3 内核配置与编译示例
为了展示Linux内核配置和编译的实际操作,下面给出一个简化的示例流程:
- 下载并安装交叉编译工具链(例如针对ARM架构的
aarch64-linux-gnu-)。 - 获取最新版本的Linux内核源代码。
- 配置内核选项,使用
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- menuconfig选择特定的硬件支持和内核特性。 - 进行内核编译,使用
make ARCH=arm64 CROSS_COMPILE=aarch64-linux-gnu- -j$(nproc)。 - 编译内核模块,并安装到指定的根文件系统目录。
整个过程不仅需要掌握命令的使用,还需要对内核配置选项有深入的理解。例如,在选择处理器支持时,需要根据实际使用的CPU型号选择正确的选项。内核编译完成后,得到的内核映像和模块可以被烧写到目标硬件上进行测试。
4.4 编译优化和错误处理
在内核编译过程中,优化编译速度和处理编译错误是常见的任务。为了优化编译速度,可以在编译命令中指定使用更多CPU核心来并行编译:
make -j4
这里的数字 4 代表同时运行的编译任务数,等于CPU的核心数可以显著加快编译速度。
对于编译错误,第一步是仔细阅读错误信息。大多数编译错误都与缺少必要的依赖包有关,因此可以通过安装这些依赖来解决。如果错误信息难以理解,可以在网上搜索错误信息,或询问社区。
4.5 小结
内核的配置与编译是Linux系统开发过程中的关键步骤。通过对内核配置选项的深入理解和熟练运用,开发者可以构建出一个既高效又具有特定功能的内核。而编译过程则是将配置落实到代码中,通过这一系列步骤,开发者能够确保内核编译的成功,并最终将其部署到目标设备上。在本章节中,我们详细讨论了内核配置与编译的基础知识,并提供了实际操作的示例,帮助读者更深刻地理解并应用到实际开发中。
5. 根文件系统构建方法
根文件系统是Linux系统不可或缺的一部分,它包含了操作系统运行时需要的基本文件和目录结构。在嵌入式Linux开发中,构建一个适合特定硬件平台的根文件系统是非常关键的一步。本章将详细介绍根文件系统的基本概念、结构以及如何构建和定制自己的根文件系统。
5.1 根文件系统概念与结构
5.1.1 根文件系统的作用和组成
根文件系统通常位于存储设备的特定分区,是操作系统启动时挂载的第一个文件系统。它不仅包含启动系统所需的核心文件,如内核模块、设备文件和系统程序,也包含了支持系统运行的基本目录结构。根文件系统的作用可以概括为以下几点:
- 提供系统启动和运行所需的基本文件和命令。
- 包含系统的启动脚本,用于加载必要的服务和进程。
- 定义用户空间的应用程序运行环境和权限控制。
- 保存系统配置信息,如用户设置、网络配置等。
一个典型的根文件系统主要由以下几部分组成:
/bin目录:存放系统运行所需的二进制可执行文件。/sbin目录:存放系统管理命令,通常这些命令仅对root用户可用。/etc目录:存放系统配置文件。/dev目录:存放设备文件,为访问硬件提供接口。/proc目录:提供一个虚拟文件系统,用于显示系统运行时的信息。/sys目录:同样提供一个虚拟文件系统,但主要用于显示和配置内核与设备的信息。/lib目录:存放系统运行所需的库文件。/tmp目录:存放临时文件,可供用户和应用程序在系统运行时使用。/var目录:存放经常变化的文件,如日志文件和缓存数据。
5.1.2 文件系统类型和选择
在选择文件系统类型时,需要考虑其对硬件平台的支持、性能要求、以及是否需要特殊功能等因素。常见的文件系统类型包括但不限于:
- ext2/ext3/ext4 :广泛用于Linux系统的文件系统,具有良好的稳定性和兼容性。
- squashfs :一种压缩文件系统,适合用于嵌入式设备,以节省存储空间。
- jffs2 :专为闪存设计的文件系统,具备很好的健壮性和恢复能力。
- tmpfs :一种基于内存的文件系统,数据仅在系统运行时存在,可以提高性能,但不会在重启后保留。
选择合适的文件系统类型,通常需要考虑实际应用场景和硬件限制。例如,在内存容量较小的嵌入式系统中,可能会倾向于使用压缩文件系统如squashfs,以减少对存储空间的需求。
5.2 构建和定制根文件系统
5.2.1 利用BusyBox构建根文件系统
BusyBox是一个集成了许多简化版UNIX工具的软件包,它体积小巧,非常适合嵌入式系统的根文件系统构建。BusyBox可以提供类似Linux系统的标准命令,而占用的存储空间却远小于完整的Linux发行版。
构建基于BusyBox的根文件系统,主要步骤如下:
-
安装BusyBox :首先需要下载BusyBox源码,然后在配置选项中选择需要的功能模块,编译安装。
bash # 下载BusyBox源码 wget https://busybox.net/downloads/busybox-1.33.1.tar.bz2 tar -xjf busybox-1.33.1.tar.bz2 cd busybox-1.33.1 # 配置BusyBox make menuconfig # 编译和安装 make && make install -
创建文件系统目录结构 :在宿主机上创建基本的文件系统结构,包括
/bin、/sbin、/etc等。
bash mkdir -p rootfs/bin rootfs/sbin rootfs/etc
- 安装BusyBox到根文件系统 :编译安装BusyBox时,将程序安装到之前创建的目录。
bash make install PREFIX=./rootfs
-
配置文件系统 :配置必要的系统配置文件,如
/etc/inittab、/etc/fstab等。 -
创建设备文件 :创建
/dev目录并挂载devtmpfs,然后创建必要的设备文件。
bash mkdir -p rootfs/dev mount -t devtmpfs none rootfs/dev mknod rootfs/dev/console c 5 1
- 构建压缩的根文件系统映像 :使用
mkfs工具,如mkfs.ext4或mksquashfs,来创建根文件系统的映像文件。
bash # 创建ext4映像文件 dd if=/dev/zero of=rootfs.ext4 bs=1M count=100 mkfs.ext4 rootfs.ext4 # 创建squashfs映像文件 mksquashfs rootfs rootfs.squashfs
- 测试根文件系统 :将生成的映像文件烧录到目标设备上,然后启动系统进行测试。
5.2.2 文件系统的挂载和配置
挂载根文件系统是使文件系统成为当前工作环境的过程。通常在Bootloader引导内核启动后,内核会根据配置挂载根文件系统。配置根文件系统主要涉及修改内核启动参数和创建挂载点。
挂载根文件系统通常需要指定三个基本参数:
- 挂载设备:通常为
/dev/mmcblk0p1等。 - 挂载点:通常为
/。 - 文件系统类型:如
ext4、squashfs等。
在内核启动参数中,挂载根文件系统的命令通常为:
root=/dev/mmcblk0p1 rootfstype=ext4 rootwait
root指定了根文件系统的设备路径。rootfstype指定了根文件系统的类型。rootwait告诉内核等待根文件系统设备准备就绪。
在嵌入式设备中,根文件系统通常被配置为只读模式,以避免意外写入对系统稳定性造成影响。在某些情况下,例如系统升级或需要更改配置时,可能需要将文件系统重新挂载为可读写模式:
mount -o remount,rw /
挂载点的配置通常在系统的启动脚本中进行。例如,使用 /etc/fstab 文件进行配置:
/dev/mmcblk0p1 / ext4 defaults 0 0
该配置将 /dev/mmcblk0p1 设备挂载为根文件系统,并使用 ext4 文件系统类型。 defaults 指定了挂载时的默认选项,而最后一个字段为保留字段。
在实际开发中,定制根文件系统是一个需要综合考虑系统需求和资源限制的过程。通过上述步骤,可以快速构建一个基本的根文件系统,并根据具体需求进行定制和优化。
至此,我们已经完成了根文件系统构建的基础知识介绍,以及利用BusyBox构建和配置根文件系统的具体步骤。在后续的应用程序开发和系统优化中,根文件系统的定制将发挥其重要作用。
6. 设备驱动开发实践
6.1 Linux设备驱动基础
6.1.1 设备驱动的作用与分类
Linux设备驱动是操作系统内核的一部分,它负责管理硬件资源和提供给上层应用的接口。设备驱动的主要作用是隐藏硬件的细节,为应用程序提供一套简洁的API进行交互。根据硬件的种类和接口不同,驱动可以分为字符设备驱动、块设备驱动和网络设备驱动等。
6.1.2 驱动开发流程概述
设备驱动开发通常包括以下几个步骤: 1. 分析硬件的技术手册,了解硬件的工作原理。 2. 根据需求编写驱动代码,实现硬件操作的抽象接口。 3. 在内核中注册驱动,并初始化硬件设备。 4. 编译驱动模块,将其加载到内核中。 5. 开发应用程序测试驱动功能,进行调试和优化。
6.2 设备驱动开发实例分析
6.2.1 字符设备驱动开发
字符设备驱动是一种最简单的设备驱动形式,其数据传输是面向字节流的,不支持随机访问。下面是一个简单的字符设备驱动的代码示例:
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/module.h>
#define DEVICE_NAME "mychardev"
#define CLASS_NAME "myclass"
static int majorNumber;
static struct class* charClass = NULL;
static struct cdev charCdev;
static int dev_open(struct inode *, struct file *);
static int dev_release(struct inode *, struct file *);
static ssize_t dev_read(struct file *, char *, size_t, loff_t *);
static ssize_t dev_write(struct file *, const char *, size_t, loff_t *);
static struct file_operations fops =
{
.open = dev_open,
.read = dev_read,
.write = dev_write,
.release = dev_release,
};
static int __init char_init(void) {
printk(KERN_INFO "MyCharDev: Initializing the CharDev\n");
// 注册字符设备号
majorNumber = register_chrdev(0, DEVICE_NAME, &fops);
if (majorNumber<0){
printk(KERN_ALERT "MyCharDev failed to register a major number\n");
return majorNumber;
}
printk(KERN_INFO "MyCharDev: registered correctly with major number %d\n", majorNumber);
// 注册设备类
charClass = class_create(THIS_MODULE, CLASS_NAME);
if (IS_ERR(charClass)) {
unregister_chrdev(majorNumber, DEVICE_NAME);
printk(KERN_ALERT "Failed to register device class\n");
return PTR_ERR(charClass);
}
// 注册设备驱动
if (IS_ERR(device_create(charClass, NULL, MKDEV(majorNumber, 0), NULL, DEVICE_NAME))) {
class_destroy(charClass);
unregister_chrdev(majorNumber, DEVICE_NAME);
printk(KERN_ALERT "Failed to create the device\n");
return PTR_ERR(charClass);
}
cdev_init(&charCdev, &fops);
if (cdev_add(&charCdev, MKDEV(majorNumber, 0), 1) < 0) {
device_destroy(charClass, MKDEV(majorNumber, 0));
class_destroy(charClass);
unregister_chrdev(majorNumber, DEVICE_NAME);
printk(KERN_ALERT "Failed to add cdev\n");
return -1;
}
printk(KERN_INFO "MyCharDev: device class created correctly\n");
return 0;
}
static void __exit char_exit(void) {
cdev_del(&charCdev);
device_destroy(charClass, MKDEV(majorNumber, 0));
class_unregister(charClass);
class_destroy(charClass);
unregister_chrdev(majorNumber, DEVICE_NAME);
printk(KERN_INFO "MyCharDev: Goodbye from the LKM!\n");
}
static int dev_open(struct inode *inodep, struct file *filep) {
printk(KERN_INFO "MyCharDev: Device has been opened\n");
return 0;
}
static ssize_t dev_read(struct file *filep, char *buffer, size_t len, loff_t *offset) {
printk(KERN_INFO "MyCharDev: Device read\n");
// 以下是实际数据传输代码
// ...
return 0;
}
static ssize_t dev_write(struct file *filep, const char *buffer, size_t len, loff_t *offset) {
printk(KERN_INFO "MyCharDev: Device write\n");
// 以下是实际数据传输代码
// ...
return len;
}
static int dev_release(struct inode *inodep, struct file *filep) {
printk(KERN_INFO "MyCharDev: Device successfully closed\n");
return 0;
}
module_init(char_init);
module_exit(char_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Your Name");
MODULE_DESCRIPTION("A simple Linux char driver");
MODULE_VERSION("0.1");
6.2.2 块设备和网络设备驱动
块设备驱动通常用于管理硬盘、SSD等存储设备。与字符设备驱动相比,块设备以块为单位进行数据传输,并支持随机访问。网络设备驱动则是管理网络接口卡(NIC),实现数据包的发送和接收。
块设备驱动的核心包括请求队列处理和底层设备操作的抽象。网络设备驱动则需要处理网络协议栈和硬件之间的数据传输。这些驱动的开发比字符设备驱动更为复杂,通常需要深入理解硬件规范和内核网络子系统的相关知识。
在本章节中,我们详细介绍了设备驱动开发的基础知识,并通过字符设备驱动的开发实例分析,向读者展示了驱动开发的基本流程和技术要点。接下来的章节我们将深入探讨如何构建和定制根文件系统,为设备驱动提供运行环境。
简介:《Tiny6410 Linux开发指南》是一本针对ARM926EJ-S内核微处理器平台的Linux系统开发教程。书中详细介绍了如何在Tiny6410平台上搭建开发环境、定制Linux内核、构建根文件系统、开发设备驱动、配置Bootloader和编写应用程序,从而实现复杂嵌入式应用的开发。教程强调理论与实践相结合,适合嵌入式系统设计工程师学习和参考。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 18
18 0
0- 0



 已为社区贡献84条内容
已为社区贡献84条内容

所有评论(0)