
学习笔记-FreeRTOS(一)
基础知识在嵌入式领域中,采用嵌入式实时操作系统(RTOS)可以更合理、更有效地利用CPU的资源,简化应用软件的设计,缩短系统开发的时间,更好地保证系统的实时性和可靠性。FreeRTOS是一个迷你的实时操作系统内核。属于轻量级的操作系统,功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程等,可基本满足较小系统的需要。由于RTOS需占用一定的系统资源(尤其是RAM资源
基础知识
在嵌入式领域中,采用嵌入式实时操作系统(RTOS)可以更合理、更有效地利用CPU的资源,简化应用软件的设计,缩短系统开发的时间,更好地保证系统的实时性和可靠性。
FreeRTOS是一个迷你的实时操作系统内核。属于轻量级的操作系统,功能包括:任务管理、时间管理、信号量、消息队列、内存管理、记录功能、软件定时器、协程等,可基本满足较小系统的需要。
由于RTOS需占用一定的系统资源(尤其是RAM资源),只有μC/OS-II、embOS、salvo、FreeRTOS等少数实时操作系统能在小RAM单片机上运行。相对μC/OS-II、embOS等商业操作系统,FreeRTOS操作系统是完全免费的操作系统,具有源码公开、可移植、可裁减、调度策略灵活的特点,可以方便地移植到各种单片机上运行,其最新版本为10.3.1版。
1、功能和特点
- 用户可配置内核功能
- 多平台的支持
- 提供一个高层次的信任代码的完整性
- 目标代码小,简单易用
- 遵循MISRA-C标准的编程规范
- 强大的执行跟踪功能
- 堆栈溢出检测
- 没有限制的任务数量
- 没有限制的任务优先级
- 多个任务可以分配相同的优先权
- 队列,二进制信号量,计数信号灯和递归通信和同步的任务
- 优先级继承
- 免费开源的源代码
2、原理机制
2.1任务调度机制
任务调度机制是嵌入式实时操作系统的一个重要概念,也是其核心技术。对于可剥夺型内核,优先级高的任务一旦就绪就能剥夺优先级较低任务的CPU使用权,提高了系统的实时响应能力。不同于μC/OS-II,FreeRTOS对系统任务的数量没有限制,既支持优先级调度算法也支持轮换调度算法,因此FreeRTOS采用双向链表而不是采用查任务就绪表的方法来进行任务调度。
FreeRTOS中每个任务对应于一个任务控制块(TCB)。
当进行任务调度时,调度算法首先实现优先级调度。系统按照优先级从高到低的顺序从就绪任务链表数组中寻找usNumberOfItems第一个不为0的优先级,此优先级即为当前最高就绪优先级,据此实现优先级调度。若此优先级下只有一个就绪任务,则此就绪任务进入运行态;若此优先级下有多个就绪任务,则需采用轮换调度算法实现多任务轮流执行。
在FreeRTOS中,相同优先级任务之间的切换时间为一个时钟节拍周期。
FreeRTOS内核支持优先级调度算法,每个任务可根据重要程度的不同被赋予一定的优先级,CPU总是让处于就绪态的、优先级最高的任务先运行。
FreeRTOS内核同时支持轮换调度算法,系统允许不同的任务使用相同的优先级,在没有更高优先级任务就绪的情况下,同一优先级的任务共享CPU的使用时间。
FreeRTOS的内核可根据用户需要设置为可剥夺型内核或不可剥夺型内核。当FreeRTOS被设置为可剥夺型内核时,处于就绪态的高优先级任务能剥夺低优先级任务的CPU使用权,这样可保证系统满足实时性的要求;当FreeRTOS被设置为不可剥夺型内核时,处于就绪态的高优先级任务只有等当前运行任务主动释放CPU的使用权后才能获得运行,这样可提高CPU的运行效率。
2.2任务管理
实现多个任务的有效管理是操作系统的主要功能。FreeRTOS下可实现创建任务、删除任务、挂起任务、恢复任务、设定任务优先级、获得任务相关信息等功能。
FreeRTOS下任务创建和任务删除的实现:
当调用sTaskCreate()函数创建一个新的任务时,FreeRTOS首先为新任务分配所需的内存。若内存分配成功,则初始化任务控制块的任务名称、堆栈深度和任务优先级,然后根据堆栈的增长方向初始化任务控制块的堆栈。接着,FreeRTOS把当前创建的任务加入到就绪任务链表。若当前此任务的优先级为最高,则把此优先级赋值给变量ucTopReadyPriorlty(其作用见2.1节)。若任务调度程序已经运行且当前创建的任务优先级为最高,则进行任务切换.
不同于μC/OS—II,FreeRTOS下任务删除分两步进行。当用户调用vTaskDelete()函数后,执行任务删除的第一步:FreeRTOS先把要删除的任务从就绪任务链表和事件等待链表中删除,然后把此任务添加到任务删除链表,若删除的任务是当前运行任务,系统就执行任务调度函数,至此完成任务删除的第一步。当系统空闲任务即prvldleTask()函数运行时,若发现任务删除链表中有等待删除的任务,则进行任务删除的第二步,即释放该任务占用的内存空间,并把该任务从任务删除链表中删除,这样才彻底删除了这个任务。值得注意的是,在FreeRTOS中,当系统被配置为不可剥夺内核时,空闲任务还有实现各个任务切换的功能。
通过比较μC/OS-II和FreeRTOS的具体代码发现,采用两步删除的策略有利于减少内核关断时间,减少任务删除函数的执行时间,尤其是当删除多个任务的时候。
函数分析:
xTaskCreate() API函数-----创建任务(线程)
//函数原型和参数说明
portBASE_TYPE xTaskCreate(
pdTASK_CODE pvTaskCode,//一个指向任务的实现函数的指针(效果上仅仅是函数名)。
const signed portCHAR * const pcName,//具有描述性的任务名,只是单纯地用于辅助调试。
unsigned portSHORT usStackDepth,//需要分配的栈空间大小
void *pvParameters,//传递到任务中的值
unsigned portBASE_TYPE uxPriority,//任务指向的优先级
xTaskHandle *pxCreatedTask //传出任务的句柄
);pvTaskCode
任务只是永不退出的 C 函数,实现常通常是一个死循环。参数pvTaskCode 只一个指向任务的实现函数的指针(效果上仅仅是函数名)。
pcName
具有描述性的任务名。这个参数不会被 FreeRTOS 使用。其只是单纯地用于辅助调试。识别一个具有可读性的名字总是比通过句柄来识别容易得多。
应用程序可以通过定义常量 config_MAX_TASK_NAME_LEN 来定义任务名的最大长度——包括’\0’结束符。如果传入的字符串长度超 过了这个最大值,字符串将会自动被截断。
usStackDepth
当任务创建时,内核会分为每个任务分配属于任务自己的唯一状态。usStackDepth 值用于告诉内核为它分配多大的栈空间。
这个值指定的是栈空间可以保存多少个字(word),而不是多少个字节(byte)。比如说,如果是 32 位宽的栈空间,传入的 usStackDepth值为 100,则将会分配 400 字节的栈空间(100 * 4bytes)。栈深度乘以栈宽度的结果千万不能超过一个 size_t 类型变量所能表达的最大值。
应用程序通过定义常量 configMINIMAL_STACK_SIZE 来决定空闲任务任用的栈空间大小。在 FreeRTOS 为微控制器架构提供的Demo 应用程序中,赋予此常量的值是对所有任务的最小建议值。如果你的任务会使用大量栈空间,那么你应当赋予一个更大的值。没有任何简单的方法可以决定一个任务到底需要多大的栈空间。计算出来虽然是可能的,但大多数用户会先简单地赋予一个自认为合理的值,然后利用 FreeRTOS 提供的特性来确证分配的空间既不欠缺也不浪费。第六章包括了一些信息,可以知道如何去查询任务使用了多少栈空间。
pvParameters
任务函数接受一个指向 void 的指针(void*)。pvParameters 的值即是传递到任务中的值。这篇文档中的一些范例程序将会示范这个参数可以如何使用。
uxPriority
指定任务执行的优先级。优先级的取值范围可以从最低优先级 0 到最高优先级(configMAX_PRIORITIES – 1)。
configMAX_PRIORITIES 是一个由用户定义的常量。优先级号并没有上限(除了受限于采用的数据类型和系统的有效内存空间),但最好使用实际需要的最小数值以避免内存浪费。如果 uxPriority 的值超过了(configMAX_PRIORITIES – 1),将会导致实际赋给任务的优先级被自动封顶到最大合法值。
pxCreatedTask
pxCreatedTask 用于传出任务的句柄。这个句柄将在 API 调用中对该创建出来的任务进行引用,比如改变任务优先级,或者删除任务。如果应用程序中不会用到这个任务的句柄,则 pxCreatedTask 可以被设为 NULL。
返回值
有两个可能的返回值:
1. pdTRUE
表明任务创建成功。
2. errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY
由于内存堆空间不足,FreeRTOS 无法分配足够的空间来保存任务
结构数据和任务栈,因此无法创建任务。
2.3时间管理
FreeRTOS提供的典型时间管理函数是vTaskDelay(),调用此函数可以实现将任务延时一段特定时间的功能。
在FreeRT0S中,若一个任务要延时xTicksToDelay个时钟节拍,系统内核会把当前系统已运行的时钟节拍总数(定义为xTickCount,32位长度)加上xTicksToDelay得到任务下次唤醒时的时钟节拍数xTimeToWake。然后,内核把此任务的任务控制块从就绪链表中删除,把xTimeToWake作为结点值赋予任务的xItemValue,再根据xTimeToWake的值把任务控制块按照顺序插入不同的链表。若xTimeToWake>xTickCount,即计算中没有出现溢出,内核把任务控制块插入到pxDelayedTaskList链表;若xTimeToWake 每发生一个时钟节拍,内核就会把当前的xTick-Count加1。若xTickCount的结果为0,即发生溢出,内核会把pxOverflowDelayedTaskList作为当前链表;否则,内核把pxDelaycdTaskList作为当前链表。内核依次比较xTickCotlrtt和链表各个结点的xTimcToWake。若xTick-Count等于或大于xTimeToWake,说明延时时间已到,应该把任务从等待链表中删除,加入就绪链表。
由此可见,不同于μC/OS—II,FreeRTOS采用“加”的方式实现时间管理。其优点是时间节拍函数的执行时间与任务数量基本无关,而μC/OS—II的OSTimcTick()的执行时间正比于应用程序中建立的任务数。因此当任务较多时,FreeRTOS采用的时间管理方式能有效加快时钟节拍中断程序的执行速度。
2.4内存分配策略
每当任务、队列和信号量创建的时候,FreeRTOS要求分配一定的RAM。虽然采用malloc()和free()函数可以实现申请和释放内存的功能,但这两个函数存在以下缺点:并不是在所有的嵌入式系统中都可用,要占用不定的程序空间,可重入性欠缺以及执行时间具有不可确定性。为此,除了可采用malloc()和free()函数外,FreeRTOS还提供了另外两种内存分配的策略,用户可以根据实际需要选择不同的内存分配策略。
- 第1种方法是,按照需求内存的大小简单地把一大块内存分割为若干小块,每个小块的大小对应于所需求内存的大小。这样做的好处是比较简单,执行时间可严格确定,适用于任务和队列全部创建完毕后再进行内核调度的系统;这样做的缺点是,由于内存不能有效释放,系统运行时应用程序并不能实现删除任务或队列。
- 第2种方法是,采用链表分配内存,可实现动态的创建、删除任务或队列。系统根据空闲内存块的大小按从小到大的顺序组织空闲内存链表。当应用程序申请一块内存时,系统根据申请内存的大小按顺序搜索空闲内存链表,找到满足申请内存要求的最小空闲内存块。为了提高内存的使用效率,在空闲内存块比申请内存大的情况下,系统会把此空闲内存块一分为二。一块用于满足申请内存的要求,一块作为新的空闲内存块插入到链表中。
2.5FreeRTOS的移植 (待补充)
FreeRTOS操作系统可以被方便地移植到不同处理器上工作,现已提供了ARM、MSP430、AVR、PIC、C8051F等多款处理器的移植。FreeRTOS在不同处理器上的移植类似于μC/0S一II。此外,TCP/IP协议栈、μIP已被移植到FreeRTOS上,具体代码可见FreeRTOS网站。
2.6FreeRTOS的不足
相对于常见的μC/OS—II操作系统,FreeRTOS操作系统既有优点也存在不足。其不足之处,一方面体现在系统的服务功能上,如FreeRTOS只提供了消息队列和信号量的实现,无法以后进先出的顺序向消息队列发送消息;另一方面,FreeRTOS只是一个操作系统内核,需外扩第三方的GUI(图形用户界面)、TCP/IP协议栈、FS(文件系统)等才能实现一个较复杂的系统,不像μC/OS-II可以和μC/GUI、μC/FS、μC/TCP-IP等无缝结合。
补充知识:
μIP协议栈是由瑞典计算机科学研究所的AdamDunkels开发,并在BSD风格的许可证下发布的免费、开放源代码的协议栈。
完整TCP/IP协议栈的实现分别需要几百KB的程序存储空间和内存,这对8位或16位芯片组成的系统来说,需消耗太多的资源而无法得到应用。对于大多数应用来说,实现完整的TCP/IP协议栈是没有必要的。
μIP设计成仅仅实现完整TCP/IP协议栈里必需的特性,其中包括IP、ICMP、μDP和TCP协议,整个协议栈是用C语言实现的,并且只能处理一个网络接口。
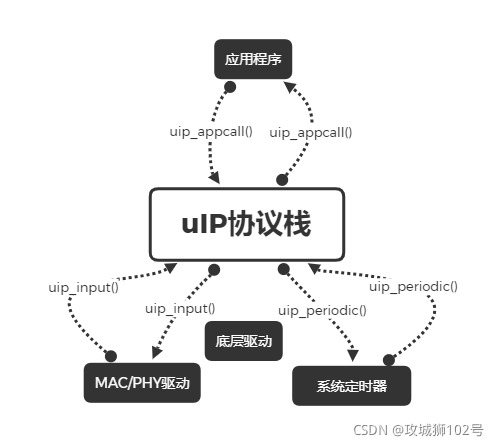
应用程序调用μIP协议栈提供的用户接口函数实现网络通信功能。发送数据时,μIP协议栈把应用程序的数据封装成符合以太网标准的数据包,再调用底层驱动程序把数据发送到以太网中的目标机器。一旦以太网控制器接收到符合要求的数据包,则μIP协议栈提取包中的有效数据传递给应用程序。μIP协议栈与底层驱动、应用程序的调用关系如下图所示。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)