
零硬件成本!Keil5内部逻辑分析仪实时捕获PWM波形(究极详细)
在嵌入式系统开发中,PWM波形的实时监测长期依赖示波器等外设,这种‘硬件依赖症’导致调试效率低下、迭代周期延长。本文揭示Keil MDK5内建逻辑分析仪的工程化应用方案,通过SWD协议实现PWM波形的数字化透视
目录
"昨天同学问我:‘兄弟,调PWM必须要有示波器吗?’
都叫我兄弟了那还说啥,我当着他的面在Keil里按下F5——
刹那间,PWM波形像音乐频谱般在屏幕上跳动起来!
前言:在嵌入式开发中,PWM波形的调试效率直接影响电机控制、电源管理等关键功能的开发周期。传统示波器虽能提供高精度波形,但接线复杂、设备成本高昂;Keil5内置的逻辑分析仪则通过SWD协议实现无接触测量,却存在带宽限制。本文将通过实测数据(包括1MHz PWM捕获对比、上升时间测量误差分析等),揭示两种工具的适用边界,并给出『硬件调试黄金法则』:当信号频率>200kHz时必须切换示波器,而代码级调试优先使用Keil。助你节省70%以上的硬件调试时间。
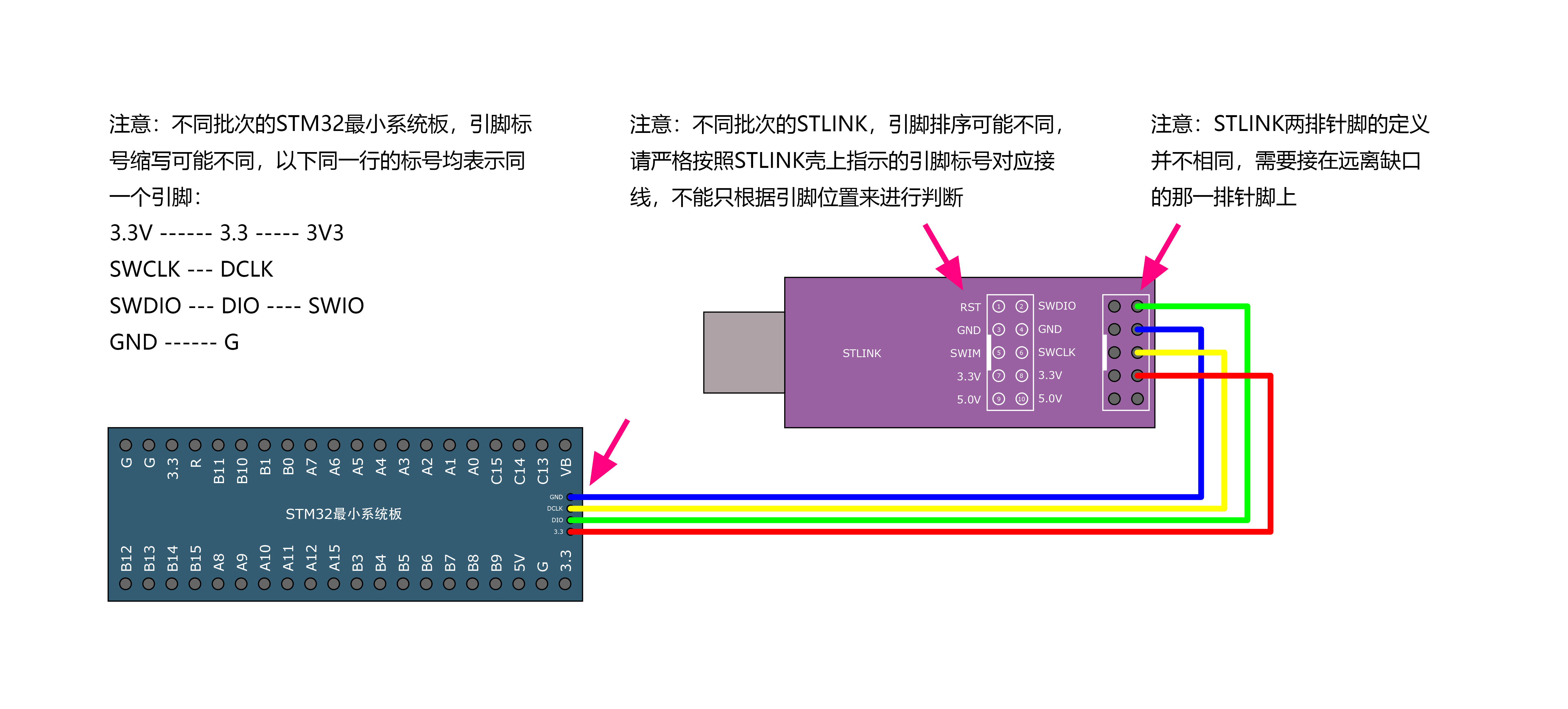
使用的芯片型号是STM32F103C8T6(师承江协科技!!)
因为只是简单的观测PWM波形,所以使用的材料只有一个芯片和ST-Link(有仿真功能即可)
1.接线图
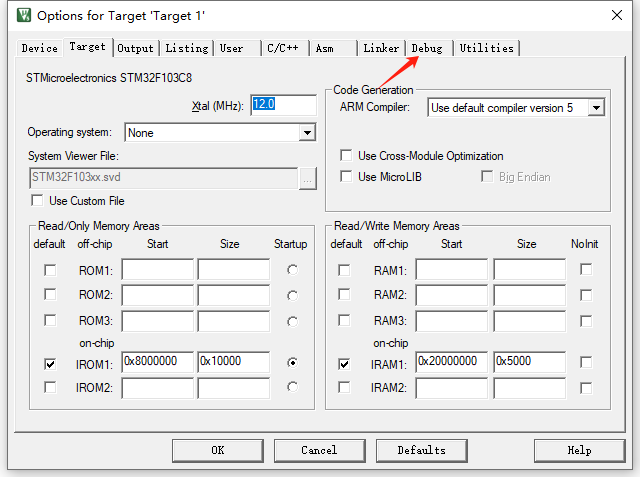
2.Keil的Debug环境配置
1.点击魔术棒(四面楚歌这个图标)

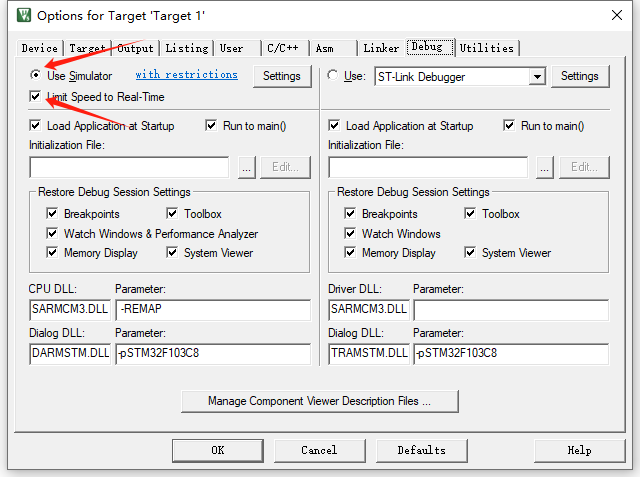
2.单击Debug
3.勾选Use Simulator(使用软件仿真)和Limit Speed to Real-Time(限制CPU模拟的速度与实际时间同步)
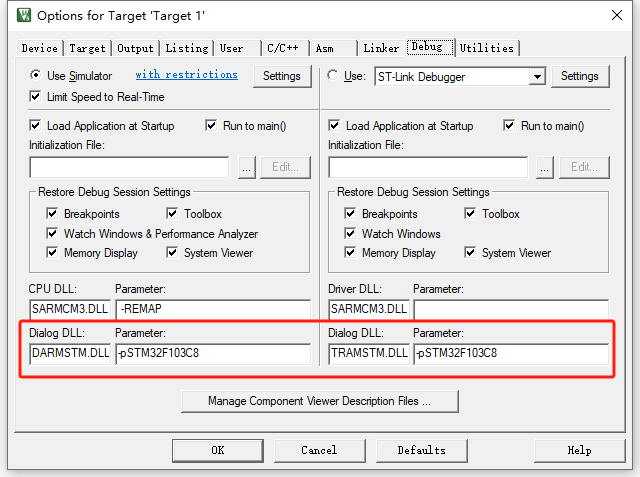
4.根据芯片填写Dialog和Parameter(我使用的是STM32F103C8T6)*四个空都要填!!!
依次填入DARMSTM.DLL,-pSTM32F103C8,TRAMSTM.DLL,-pSTM32F103C8
然后单击OK
建议复制
3.代码部分
我使用的是TIM1,是高级定时器,所以必须要加入这一行代码才能输出PWM波形!!!
PA11---->TIM1_CH4(高级定时器1的通道4)
TIM_CtrlPWMOutputs(TIM1,ENABLE);//高级定时器专属--MOE主输出使能#include "PWM.h"
/**
* @brief 初始化驱动电机的PWM定时器
* @param arr:自动重装载值(决定PWM频率)
* @param psc:预分频系数(决定PWM频率)
*/
void PWM_Init_TIM1(u16 Psc,u16 Per)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1,ENABLE);//开启时钟
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //初始化GPIO--PA11为复用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_11;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period=Per;
TIM_TimeBaseInitStruct.TIM_Prescaler=Psc;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStruct);
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1;//初始化输出比较
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse=0;
TIM_OC4Init(TIM1,&TIM_OCInitStruct);
TIM_CtrlPWMOutputs(TIM1,ENABLE);//高级定时器专属--MOE主输出使能
TIM_OC4PreloadConfig(TIM1,TIM_OCPreload_Enable);//ENABLE//OC4预装载寄存器使能
TIM_ARRPreloadConfig(TIM1,ENABLE);//TIM1在ARR上预装载寄存器使能
TIM_Cmd(TIM1,ENABLE);//开定时器。
}
/**
* @brief PWM设置CCR
* @param Compare 要写入的CCR的值
* @Notice CCR和ARR共同决定占空比,此函数仅设置CCR的值,并不直接是占空比
* 占空比Duty = CCR / (ARR + 1)
*/
void PWM_SetCompare(uint16_t Compare)
{
TIM_SetCompare4(TIM1, Compare); //设置CCR4的值
}
PWM.h代码
#ifndef __PWM_H
#define __PWM_H
#include "stm32f10x.h" // Device header
void PWM_Init_TIM1(u16 Psc,u16 Per);
void PWM_SetCompare(uint16_t Compare);
#endif主程序代码
#include "stm32f10x.h" // Device header
#include "PWM.h"
int main(void)
{
PWM_Init_TIM1(72-1, 1000-1); //(PSC,ARR)第一个是预分频值,第二个是自动重装载值
PWM_SetCompare(500); //设置CCR的值,占空比Duty = CCR / (ARR + 1)
while(1)
{
}
}4.打开Debug调试界面
1.点击Start Debug Session或(Ctrl+F5)
2.单击Setup.....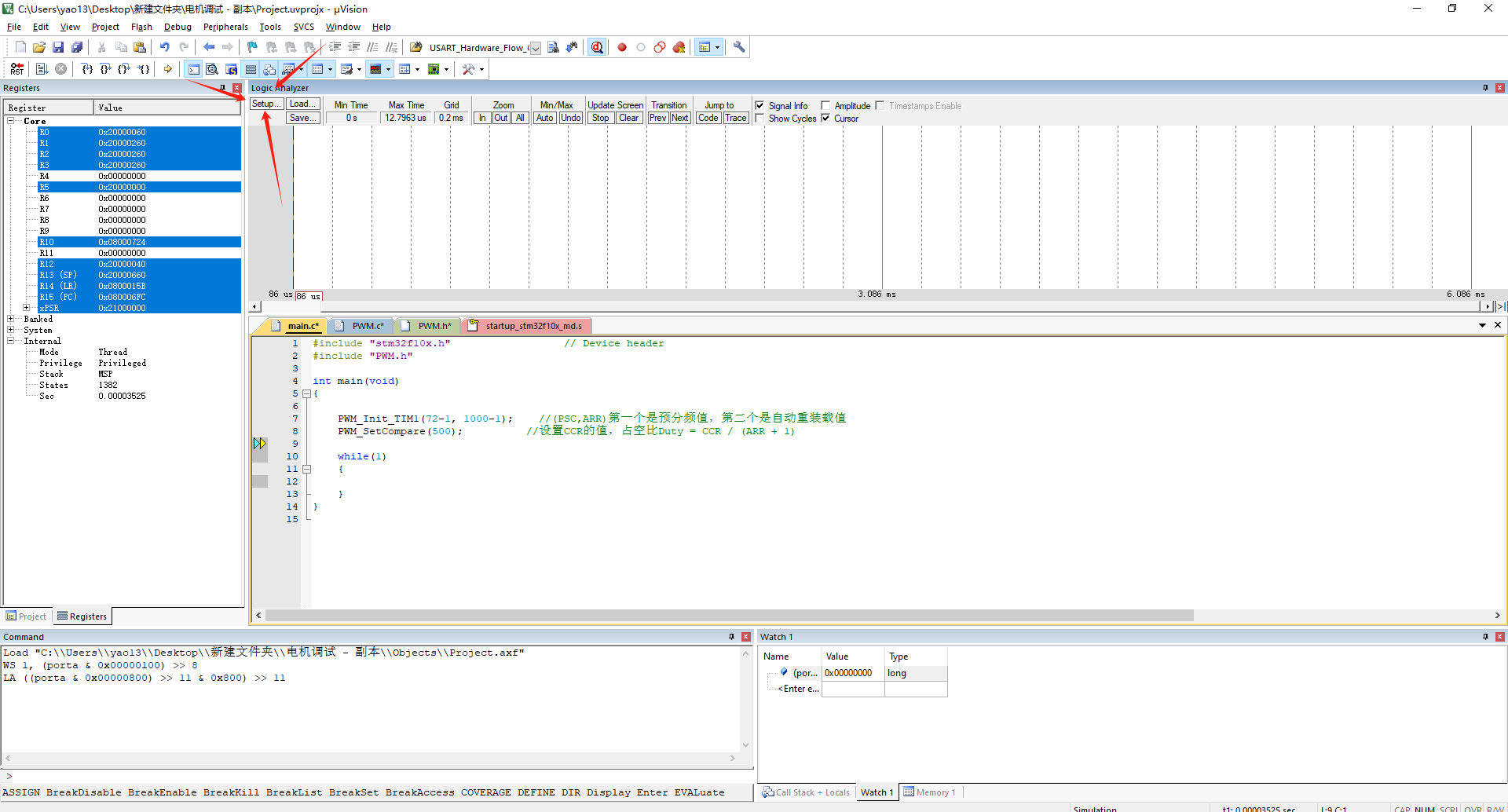
3.点击这个虚线小方框
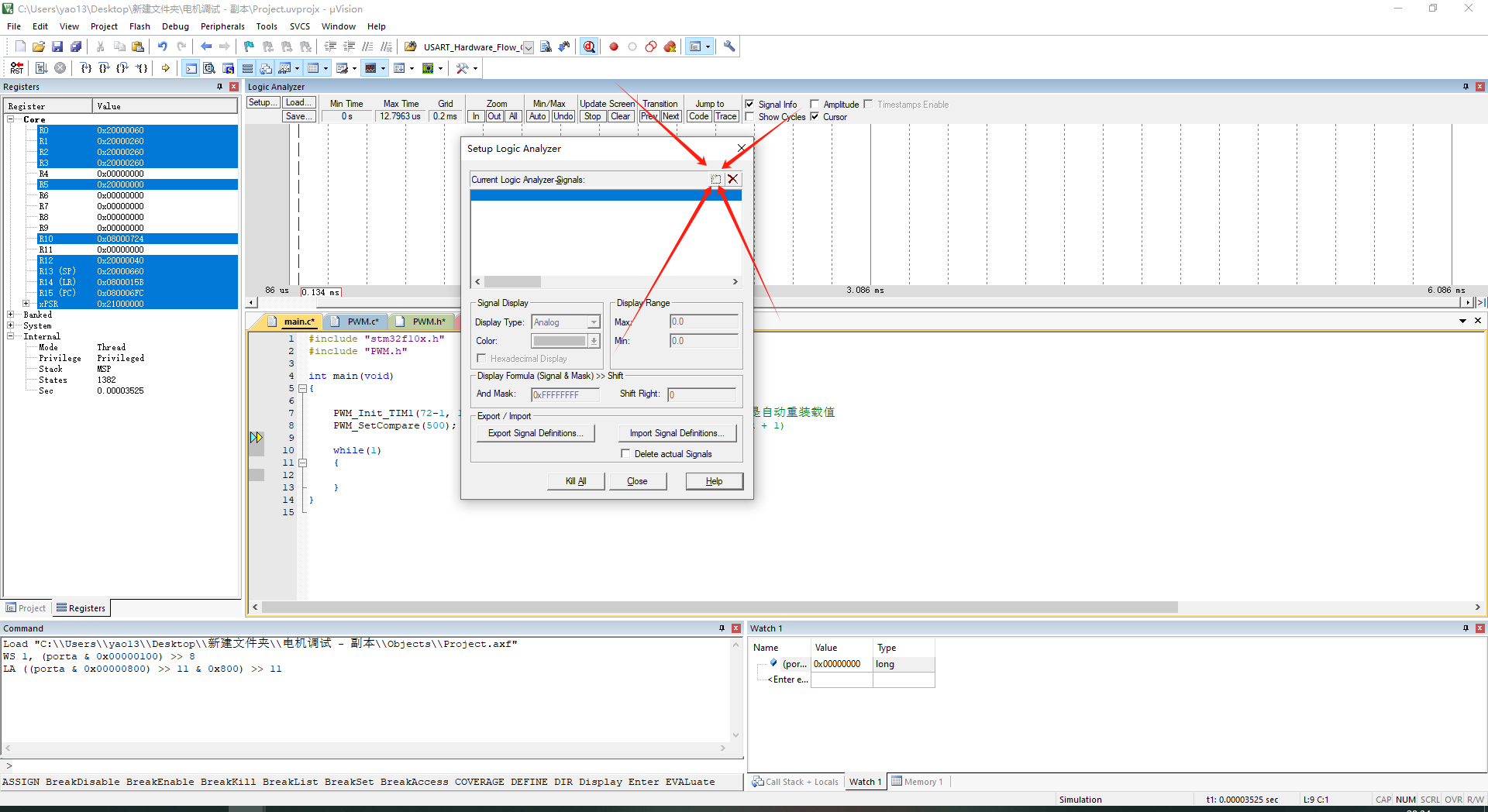
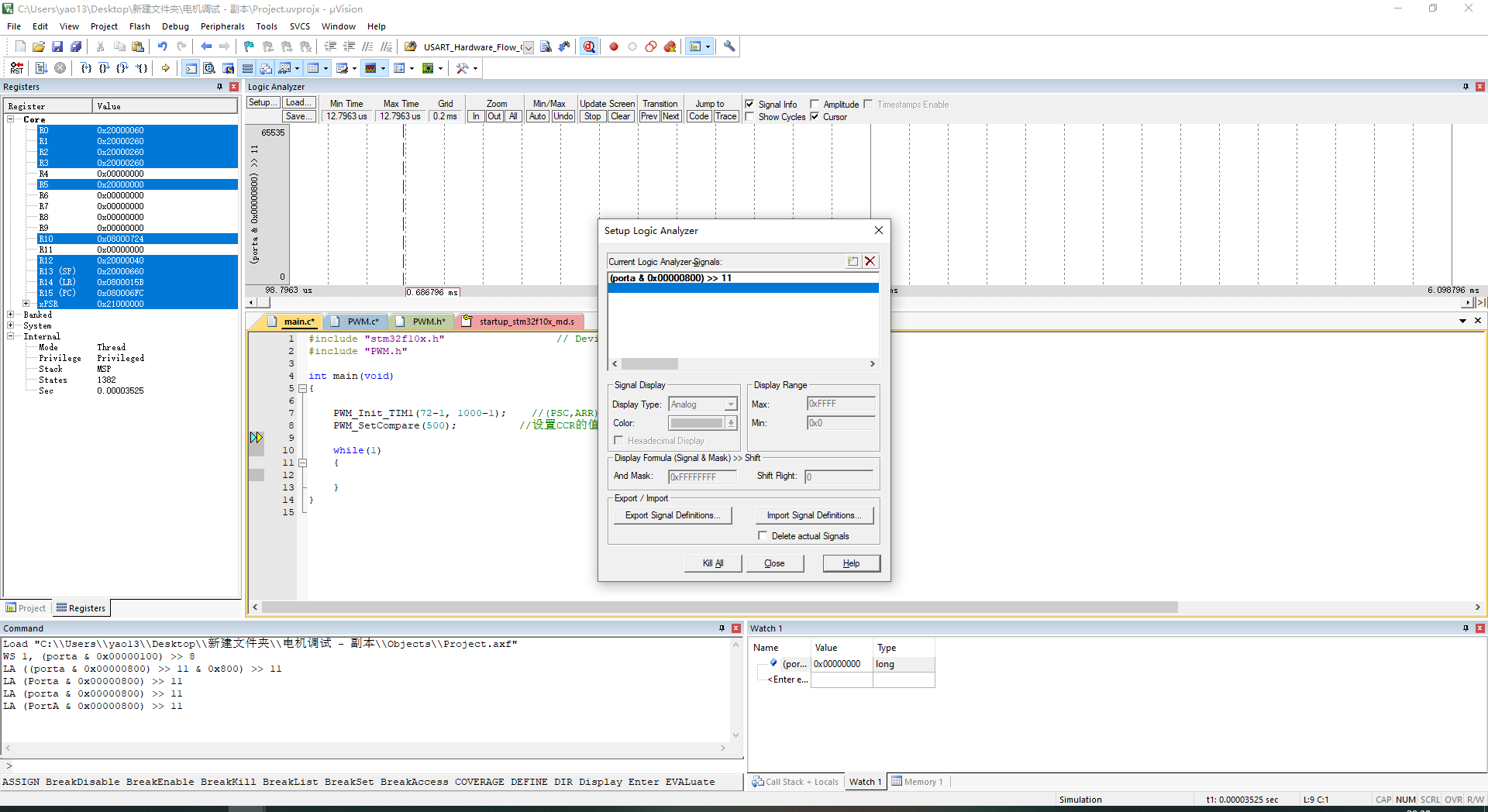
4.输入我们需要观察的引脚(Portx.xx,不区分大小写)
因为我们本次需要观测的是PA11引脚 ,所以输入Porta.11然后后回车,再点击Close
5.点击全速运行代码(Run或F5)
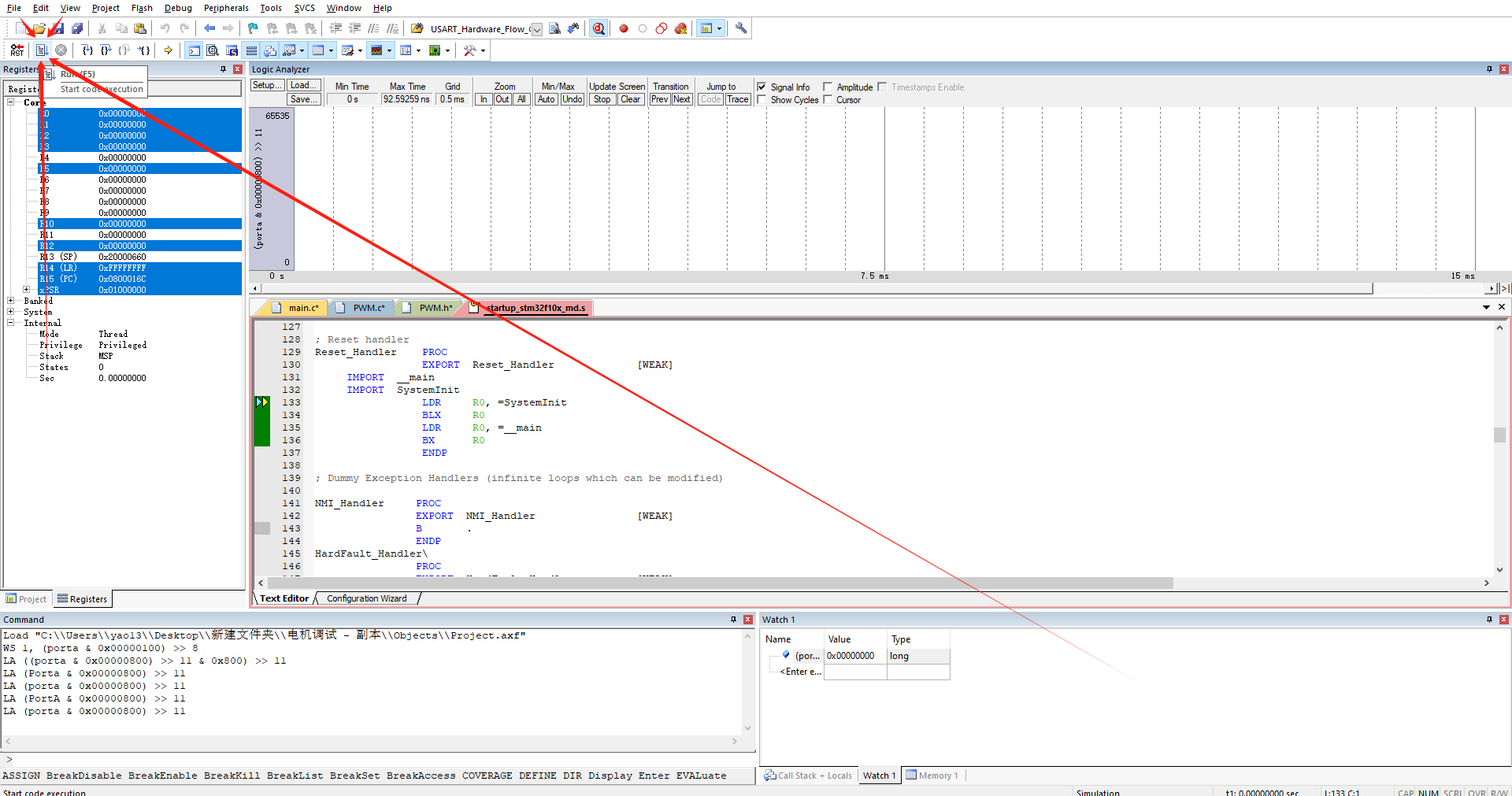
接下来就可以观察自己的脉冲波形的占空比(可以用鼠标滚轮压缩/扩展最小时间网格Grid)
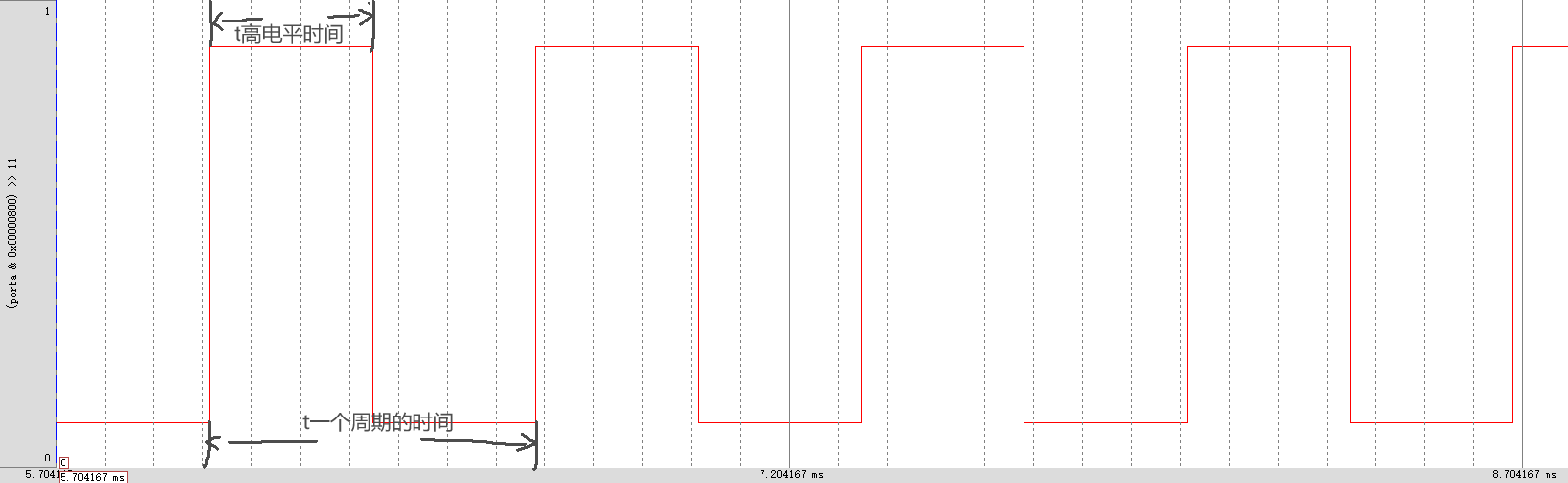
在一个周期内,高电平所占的时间与整个周期时间的比率叫占空比
ARR值为1000-1,CCR的值为500
占空比为:,则占空比为50%
取一个周期中的上升沿开始时间为6.017944ms
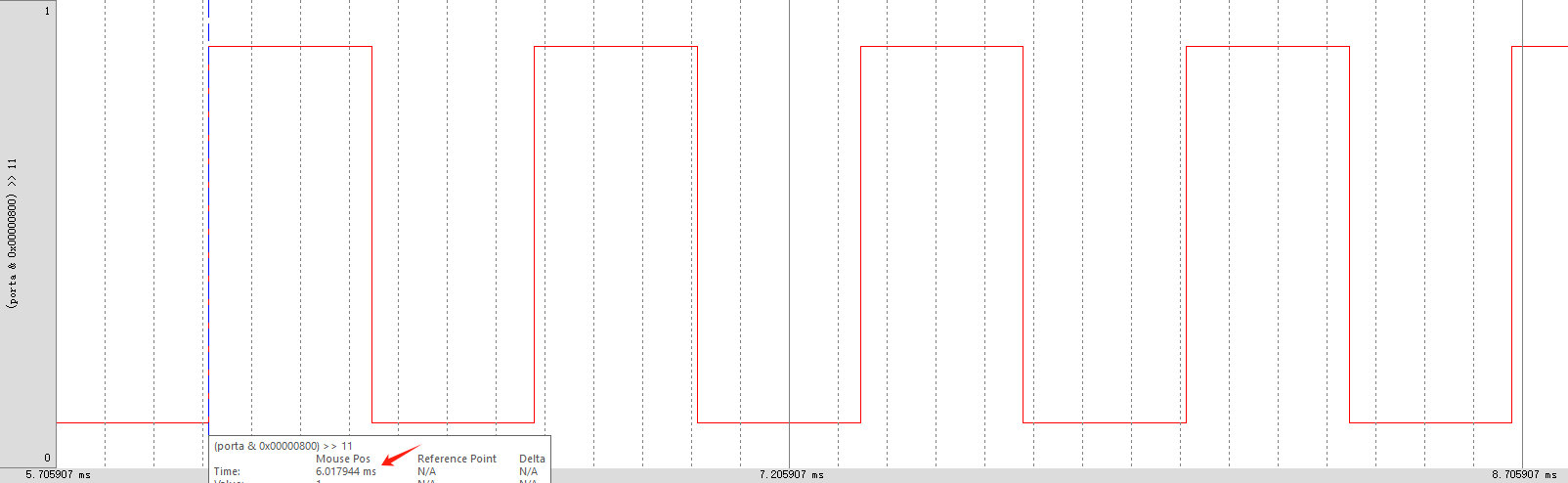
再取到下一个上升沿的时间为6.685167ms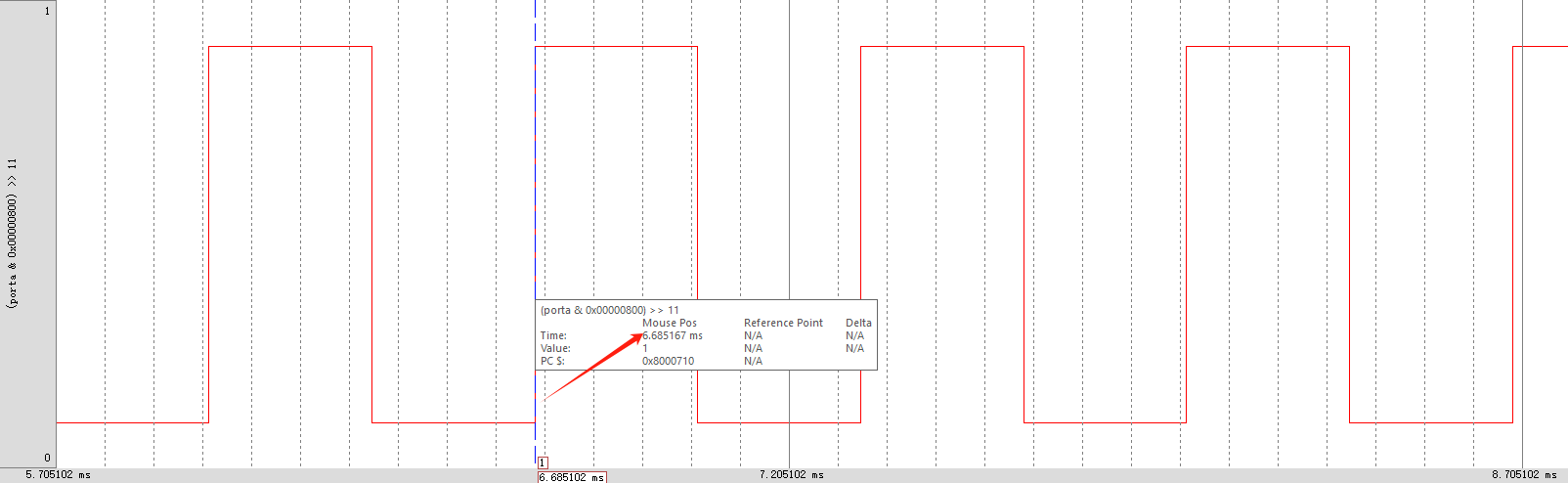
则得到一个周期的时间为6.685167ms-6.017944ms=0.667223ms
通过取下降沿时间可以得到高电平的时间为6.685167ms-6.3515555ms
则占空比为=50%
实验符合预期
5.拓展实验
若是要实现呼吸灯,PID这一类需要对PWM时时刻刻进行改变的程序,Keil能否快速且准确的观察到波形呢??
主程序略微修改一下,动态循环修改占空比,再仔细观察波形图
主程序代码部分
#include "stm32f10x.h" // Device header
#include "PWM.h"
#include "Delay.h"
uint8_t i;
int main(void)
{
PWM_Init_TIM1(720-1, 100-1); //(PSC,ARR)第一个是预分频值,第二个是自动重装载值
// PWM_SetCompare(500); //设置CCR的值,占空比Duty = CCR / (ARR + 1)
while(1)
{
for (i = 0; i <= 100; i++)
{
PWM_SetCompare(i); //依次将定时器的CCR寄存器设置为0~100,PWM占空比逐渐增大
Delay_ms(10); //延时10ms
}
for (i = 0; i <= 100; i++)
{
PWM_SetCompare(100 - i); //依次将定时器的CCR寄存器设置为100~0,PWM占空比逐渐减小
Delay_ms(10); //延时10ms
}
}
}
点击编译后进入Debug模式(否则修改无效)
观察图像,速度略快,但是还是能清晰的看见keil内部逻辑分析仪的真实有效性
6.结束语(程序源码)
好了,希望这篇教程能够帮助你更好地掌握Keil Debug的使用方法,如果有什么不对的地方欢迎留言指正,一起享受嵌入式的乐趣!!
链接: https://pan.baidu.com/s/1nlekTi1v5DSXprBc58J9Qw 提取码: JCY1

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 28
28 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)