
C51单片机编程实例大全(45个案例精讲)
C51编程语言是一种专为8051微控制器系列设计的高级编程语言,它是C语言的一个变种。与标准C语言相比,C51在语法上没有太大的区别,但为8051微控制器的硬件特性提供了特定的支持,如直接位操作、特殊的存储类型和寄存器定义等。C51编程语言因其简洁、高效和移植性好而广泛应用于嵌入式系统开发中。

简介:C51单片机编程是学习8051系列单片机控制的基础。本集合提供了45个精心挑选的实例,覆盖了C51编程的核心概念,如基础语法、中断系统、IO操作、定时器、串行通信、A/D和D/A转换、中断驱动编程、看门狗、I2C和SPI通信、LCD显示、EEPROM存储、PWM控制、数据同步处理以及多任务编程等。这些实例不仅帮助初学者理解理论知识,更能够通过实践提高编程技能,为未来单片机应用开发奠定坚实基础。 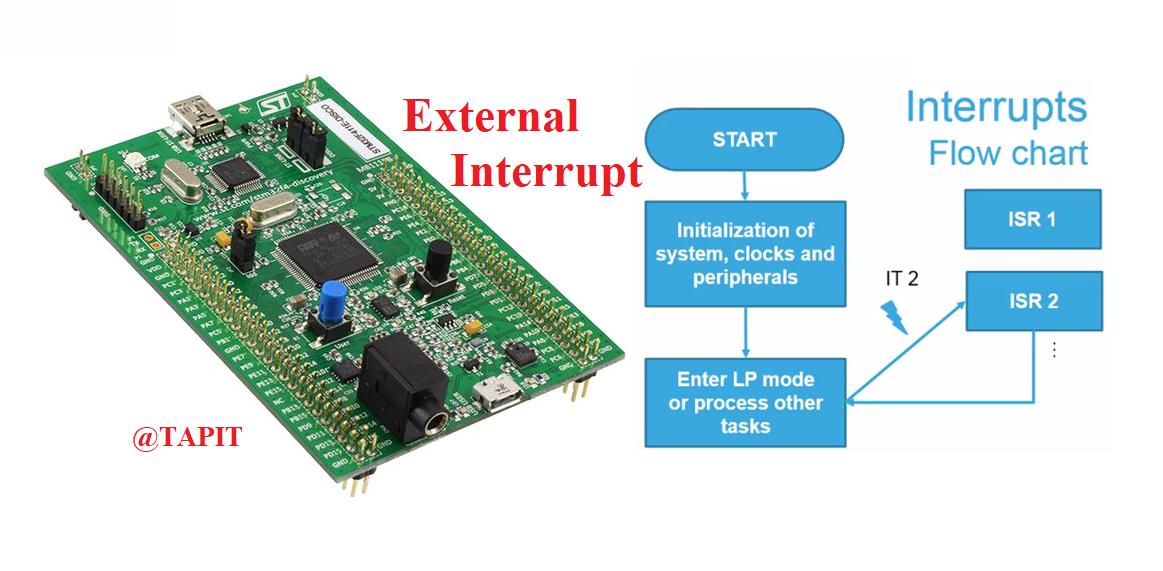
1. C51编程基础语法
1.1 C51编程语言概述
C51编程语言是一种专为8051微控制器系列设计的高级编程语言,它是C语言的一个变种。与标准C语言相比,C51在语法上没有太大的区别,但为8051微控制器的硬件特性提供了特定的支持,如直接位操作、特殊的存储类型和寄存器定义等。C51编程语言因其简洁、高效和移植性好而广泛应用于嵌入式系统开发中。
1.2 基本语法元素
学习C51编程基础语法首先需要了解以下几个关键元素:
- 数据类型:定义变量存储的数据类型,如
char、int、long等,以及针对8051的特有类型如sbit和sfr。 - 控制结构:包括条件语句如
if和switch,循环语句如for、while和do-while,用于控制程序的流程。 - 函数:用于组织代码,实现功能模块化,是C51程序设计的核心。
1.3 特殊功能寄存器和位变量
C51允许开发者直接访问和操作微控制器的特殊功能寄存器(SFRs),这对于硬件控制至关重要。例如,通过设置定时器寄存器来控制定时器的行为。此外,使用 sbit 关键字可以定义位变量,直接操作微控制器的个别位。
sbit LED = P1^0; // 将P1端口的第0位定义为LED控制位
void main() {
LED = 1; // 点亮LED
// ... 其他代码 ...
}
在这个例子中,我们定义了 LED 作为P1端口第一个引脚的控制位,并在主函数中将其置为高电平,从而点亮LED灯。
接下来的章节将深入探讨C51的中断系统设计与应用、输入/输出端口控制、定时器与计数器操作以及串行通信实践等,这些都是嵌入式系统开发者必须掌握的关键技能。
2. 中断系统设计与应用
中断系统是微控制器编程的核心组件之一,它使得微控制器能够在处理一个任务的同时响应外部或内部的突发事件。中断的管理对于保证程序的实时性和系统的稳定性至关重要。
2.1 中断系统的工作原理
2.1.1 中断的概念与分类
中断可以被看作是微控制器在执行一个任务时,被另一个事件打断的机制。当中断发生时,微控制器会暂停当前的任务,转而执行一个特定的中断服务程序,待处理完中断事件后再返回继续执行被中断的任务。
中断可以分为同步中断和异步中断。同步中断是由CPU指令执行直接引起的中断,通常用于处理程序执行过程中的错误,如溢出错误。异步中断又称为外部中断,它是由微控制器外部事件触发的中断,如外部信号的改变或定时器溢出。
2.1.2 中断向量和中断服务程序
当中断发生时,微控制器根据中断向量表找到对应中断向量,这个中断向量指向一个特定的中断服务程序(ISP)。中断服务程序包含了处理中断事件所需执行的指令序列。
中断服务程序应该尽量简短和高效,以减少对主程序的影响。当中断处理完成后,通常使用一个特殊的返回指令(如C51中的 RETI 指令)来返回主程序。
2.2 中断系统的设计要点
2.2.1 中断源的识别和管理
在设计中断系统时,首先要识别可能的中断源,并对它们进行管理。中断源可以是外部设备的信号变化、定时器溢出、串行通信数据到达等。通过为每个中断源分配一个唯一的中断向量,并编写相应的中断服务程序,可以确保每个中断源被正确处理。
在多任务系统中,可能需要根据中断源的优先级来管理中断。高优先级的中断可以打断低优先级的中断,以确保紧急事件得到及时处理。
2.2.2 中断优先级的设置和调整
中断优先级的设置对于确保系统稳定运行非常重要。在微控制器中,可以通过硬件或者软件配置来设置中断优先级。
硬件配置通常涉及修改中断控制寄存器的位模式,以确定不同中断源之间的优先级关系。在软件中,则可以通过编程逻辑来实现优先级的动态管理,比如,通过设置标志位来控制中断服务程序的执行顺序。
2.3 中断系统的实际应用案例
2.3.1 外部中断的实例分析
以一个外部中断的例子来说明中断系统如何工作。假设我们有一个按钮连接到微控制器的外部中断引脚,当按钮被按下时,产生一个下降沿触发中断。中断服务程序将检测到按键动作,并执行相应的处理,例如切换LED状态。
以下是实现外部中断的代码示例:
#include <REGX51.H>
void External0_ISR(void) interrupt 0 {
// 这里添加外部中断0的处理代码
P1 = ~P1; // 举例:简单地切换P1端口所有位的状态
}
void main() {
IT0 = 1; // 设置INT0为边沿触发模式
EX0 = 1; // 使能外部中断0
EA = 1; // 开启全局中断
while(1) {
// 主循环代码
}
}
2.3.2 定时器中断的实际应用
定时器中断是另一个常见的中断应用案例。定时器可以用来生成精确的时间延迟或者周期性任务的执行。例如,我们可以通过定时器中断每秒钟切换LED的状态,以实现一个简单的秒表功能。
下面的代码展示了如何使用定时器0产生中断:
#include <REGX51.H>
void Timer0_ISR(void) interrupt 1 {
// 重新加载定时器初值
TH0 = (65536 - 50000) / 256; // 定时器高8位初值
TL0 = (65536 - 50000) % 256; // 定时器低8位初值
P1 = ~P1; // 每次定时器中断切换P1端口所有位的状态
}
void main() {
TMOD = 0x01; // 定时器0工作在模式1
TH0 = (65536 - 50000) / 256; // 定时器高8位初值
TL0 = (65536 - 50000) % 256; // 定时器低8位初值
ET0 = 1; // 使能定时器0中断
EA = 1; // 开启全局中断
TR0 = 1; // 启动定时器0
while(1) {
// 主循环代码,执行其他任务
}
}
在上述代码中,定时器0被配置为模式1,初值被设置为产生大约1秒的定时周期。每次定时器溢出时,定时器中断服务程序就会被调用,并切换P1端口的状态。
本章节介绍了中断系统的工作原理、设计要点以及实际应用案例。通过这些内容,读者应该对中断系统有了全面的理解,能够在自己的嵌入式项目中有效地使用中断。
3. 输入/输出端口控制
在现代电子系统设计中,输入/输出(I/O)端口控制是至关重要的环节,它是微控制器与外部设备通信的桥梁。本章将深入探讨端口控制的基本概念、编程技巧以及高级应用。
3.1 端口控制的基本概念
3.1.1 端口的功能和类型
端口是微控制器与外部世界交互的接口,其主要功能是实现数据的输入和输出。端口可以分为输入端口和输出端口。输入端口用于读取外部信号,例如开关状态、传感器数据等;输出端口则用于控制外部设备,例如LED指示灯、电机驱动器等。
端口类型根据微控制器的不同而有所差异,但通常可以分为以下几类:
- 并行端口:数据位宽度大,适合高速数据传输,但占用较多的引脚。
- 串行端口:数据位宽度小,传输速度相对较慢,但节省引脚资源。
- 模拟端口:用于读取模拟信号,可转换为数字信号供微控制器处理。
- 特殊功能端口:如I2C、SPI等,专用于特定通信协议。
3.1.2 端口的配置与初始化
正确的端口配置与初始化是确保微控制器正常工作的第一步。在C51系列微控制器中,端口的配置通常涉及到对特定寄存器的操作。每个I/O端口都有一个对应的控制寄存器,通过设置寄存器的不同位,可以控制端口的工作模式,如输入/输出模式、开漏/推挽输出等。
以8051单片机为例,其端口0、1、2、3可以通过设置特定的寄存器位来配置为准双向I/O口。下面是一个初始化端口的代码示例:
#include <reg51.h>
void Port_Init() {
P1 = 0xFF; // 将端口1初始化为输出模式,并设置所有位为高电平
P2 = 0x00; // 将端口2初始化为输入模式
}
void main() {
Port_Init(); // 调用初始化函数
while(1) {
// 主循环,可以执行其他任务
}
}
上述代码通过向端口P1和P2的控制寄存器写入特定值来配置端口。其中, P1 = 0xFF; 表示将P1端口的每一位设置为高电平,意味着P1端口配置为输出模式; P2 = 0x00; 则将P2端口配置为输入模式。
3.2 端口控制的编程技巧
3.2.1 端口数据的读写操作
掌握端口数据的读写操作对于控制外部设备至关重要。数据的写入通常是直接将数据赋值给端口寄存器,而读取则涉及到从端口寄存器中读取数据。
// 端口数据写入示例
P1 = 0xAA; // 将10101010二进制数输出到端口P1
// 端口数据读取示例
unsigned char input_data;
input_data = P2; // 从端口P2读取数据到变量input_data
3.2.2 端口的扩展和应用实例
在实际应用中,微控制器的I/O端口数量可能不足以满足需求,这时就需要对端口进行扩展。常见的扩展方法包括使用I/O扩展器芯片,或者通过多路复用技术增加可用的I/O数量。
// 使用外部I/O扩展器的示例代码
#define I2C_ADDRESS 0x20 // 假设I/O扩展器的I2C地址为0x20
void I2C_Start();
void I2C_Stop();
void I2C_WriteByte(unsigned char data);
void Port_Expand_Example() {
I2C_Start(); // 开始I2C通信
I2C_WriteByte(I2C_ADDRESS << 1); // 发送I/O扩展器地址
I2C_WriteByte(0xFF); // 将数据0xFF写入I/O扩展器的寄存器
I2C_Stop(); // 结束I2C通信
}
3.3 输入/输出端口的高级应用
3.3.1 键盘矩阵的扫描与控制
在人机交互系统中,键盘矩阵是常见的输入设备。它通过多行多列的交叉点来识别按键的按下。扫描键盘矩阵通常涉及到对输入端口的读取,并判断哪个按键被激活。
#define ROWS 4 // 定义键盘矩阵的行数
#define COLS 4 // 定义键盘矩阵的列数
// 键盘矩阵扫描函数
unsigned char Scan_Keypad() {
unsigned char row, col, key = 0xFF;
for(row = 0; row < ROWS; row++) {
P1 = ~(1 << row); // 将当前行置低电平,其余行置高电平
for(col = 0; col < COLS; col++) {
if(!(P2 & (1 << col))) { // 检测列是否有低电平
key = (row * COLS) + col; // 计算按键编码
break;
}
}
if(key != 0xFF) break; // 如果检测到按键,则退出循环
}
return key;
}
3.3.2 显示器接口的数据传输
在嵌入式系统中,液晶显示器(LCD)等显示设备需要通过I/O端口与微控制器通信。例如,一个字符LCD通常需要至少7条数据线和几条控制线来显示文本信息。数据传输通常涉及到数据和控制命令的发送。
// LCD数据传输函数
void LCD_SendCommand(unsigned char cmd) {
// 设置RS为低电平表示发送命令
P3_0 = 0; // RS控制线,0表示命令
P3_1 = 1; // E控制线,1表示使能
P0 = cmd; // 将命令字节输出到数据端口
// 产生一个短暂的脉冲信号来发送命令
P3_1 = 0;
P3_1 = 1;
}
void LCD_SendData(unsigned char data) {
// 设置RS为高电平表示发送数据
P3_0 = 1; // RS控制线,1表示数据
P3_1 = 1; // E控制线,1表示使能
P0 = data; // 将数据字节输出到数据端口
// 产生一个短暂的脉冲信号来发送数据
P3_1 = 0;
P3_1 = 1;
}
通过本章节的介绍,我们可以了解到I/O端口控制对于微控制器编程的重要性。掌握基本概念、编程技巧以及高级应用,能够让我们更好地进行硬件接口编程,从而实现更复杂的功能。随着技术的不断发展,I/O端口控制依然是微控制器应用中不可或缺的一部分。
4. 定时器与计数器操作
4.1 定时器的工作模式
4.1.1 定时器/计数器的基本概念
定时器/计数器是微控制器中重要的功能模块,它们广泛用于生成准确的时间延迟、事件计数以及测量时间间隔等。定时器通过内置的计数器,根据设定的时钟频率进行计数,当计数值达到预设值时,可以触发中断或改变输出状态。
在51单片机中,定时器/计数器的工作模式由特定的寄存器控制,如TMOD和TCON寄存器。TMOD寄存器用于设置定时器的工作模式和计数器的使用状态,而TCON寄存器则用于控制定时器的启停和中断标志。
4.1.2 定时器的工作模式及应用
定时器可以工作在不同的模式下,以便适应不同的应用场景。例如,51单片机的定时器可以工作在四种模式:
- 模式0:13位定时器/计数器模式。
- 模式1:16位定时器/计数器模式。
- 模式2:8位自动重装载定时器/计数器模式。
- 模式3:仅适用于定时器0,将其分为两个独立的8位定时器。
在实际应用中,定时器的模式选择取决于我们的需求。例如,模式1适合大多数需要较长时间定时的应用,而模式2的自动重装载功能特别适合于周期性任务的定时。
4.2 定时器的编程实现
4.2.1 定时器的初始化与配置
初始化定时器时,首先要设置TMOD寄存器以确定定时器的模式,并设定合适的计数值。以模式1为例,即16位定时器/计数器模式:
TMOD = 0x01; // 设置定时器0为模式1,16位定时器模式
接着,需要设置THx和TLx寄存器(x表示定时器编号),这两个寄存器共同决定定时器的初始值。定时器计数时从这个初始值开始计数至0xFFFF,之后溢出并可能触发中断。
TH0 = 0xFC; // 设置定时器0的初始值高位
TL0 = 0x66; // 设置定时器0的初始值低位
最后,启动定时器,可以通过设置TCON寄存器中的TR0位来实现:
TR0 = 1; // 启动定时器0
4.2.2 定时器中断服务程序编写
定时器溢出时,如果使能了中断,就会触发定时器中断。为了响应中断,需要编写定时器的中断服务程序:
void timer0_isr() interrupt 1 using 1 {
// 用户代码
TH0 = 0xFC; // 重新加载初始值的高位
TL0 = 0x66; // 重新加载初始值的低位
}
在上述代码中,我们设置了定时器0的中断服务程序。当中断发生时,处理器会自动调用这个函数。在这个函数中,通常需要重新加载定时器的初始值,以便定时器可以继续以相同的间隔时间溢出。注意,这里使用了 using 1 关键字,它指定了使用寄存器组1来保存和恢复中断前的状态,这是为了加快中断服务程序的执行速度。
4.3 定时器的高级应用
4.3.1 定时器在事件控制中的应用
在一些需要精确时间控制的应用中,定时器可以用来触发特定的事件。例如,控制电机的转速或者LED灯的闪烁频率。定时器中断可以作为一个事件的计时器,每隔固定的时间触发一次中断,然后在中断服务程序中执行相应的任务。
void timer0_isr() interrupt 1 {
static unsigned int ticks = 0;
TH0 = 0xFC; // 重新加载初始值的高位
TL0 = 0x66; // 重新加载初始值的低位
if (++ticks >= 1000) { // 每隔1000个定时器周期
ticks = 0;
// 执行需要定时执行的任务
}
}
在此例中,我们利用静态变量 ticks 来记录中断发生的次数。当计数达到1000时,执行一个预定任务,然后重置 ticks 。
4.3.2 定时器与外部中断的联动
定时器的另一个高级应用是与外部中断进行联动。例如,我们可以用外部中断信号启动或停止定时器,或者根据外部事件调整定时器的计数值。这样可以实现更加复杂的事件控制逻辑。
void external_isr() interrupt 0 {
TR0 = !TR0; // 切换定时器0的启动/停止状态
}
在这个示例中,我们假设外部中断0用于控制定时器0。当外部中断触发时,我们通过切换TR0位来控制定时器的运行状态。
通过以上内容的介绍,我们可以看到定时器在微控制器编程中的重要性和灵活性。从基本的工作原理和模式设置,到实际编程实现和高级应用,定时器提供了一系列强大的工具,帮助开发者实现精确的时间控制和事件管理。
5. 串行通信实践
串行通信作为微控制器与其他设备进行数据交换的基本方式之一,在嵌入式系统中扮演着不可或缺的角色。本章将深入探讨串行通信的基本理论、编程实现以及其在实践中的应用扩展。
5.1 串行通信的基本理论
5.1.1 串行通信的原理和标准
串行通信是指数据按位(bit)顺序一位接一位地在设备之间传输的过程。与并行通信相比,串行通信由于只需要较少的线路,通常更节省成本并且更适合长距离传输。串行通信有多种标准和协议,如RS-232、RS-485和SPI等。
RS-232是最常见的串行通信标准之一,它规定了信号电平、信号线的数目以及接口的物理特性。RS-232广泛应用于PC机与外设之间的通信。RS-485则允许更远的通信距离,适用于工业控制和多点通信环境。SPI(Serial Peripheral Interface)是一个高速的同步串行通信标准,它主要在微控制器和外围设备之间进行通信,如ADC、DAC、EEPROM等。
5.1.2 波特率的设置和误差分析
波特率是指每秒钟传输的符号数量,通常单位是波特(baud)。在串行通信中,波特率的设定要确保通信双方的速率匹配。如果波特率设置不准确,将导致数据错误,接收端可能无法正确解析发送的数据。
波特率误差分析涉及多个方面,包括晶振精度、时钟源稳定性、温度变化以及器件的老化。微控制器中通常有专门的波特率发生器来生成精确的时钟信号。在实际应用中,波特率的误差容忍度取决于通信双方的数据解析能力和容错能力。
5.2 串行通信的编程实现
5.2.1 串口的初始化与配置
在C51微控制器中,串行通信是通过内置的串行口(UART)来实现的。初始化串口通常包括配置波特率、串口模式、数据位、停止位和校验位等。
例如,使用AT89C51进行串口初始化的代码片段可能如下:
#include <reg51.h>
void SerialInit() {
TMOD = 0x20; // 设置定时器1为模式2(自动重装)
TH1 = 0xFD; // 设置波特率9600@11.0592MHz晶振
SCON = 0x50; // 设置串口为模式1(8位数据,可变波特率)
TR1 = 1; // 启动定时器1
TI = 1; // 设置发送标志位
RI = 0; // 清除接收标志位
}
void main() {
SerialInit(); // 初始化串口
// ... 其他代码 ...
}
5.2.2 数据的发送和接收过程
数据发送和接收是串行通信的两个基本操作。数据的发送可以使用 SBUF 寄存器,而接收数据时需要监控 RI 标志位,并从 SBUF 中读取数据。
发送数据的代码示例如下:
void TransmitChar(char dat) {
SBUF = dat; // 将数据放入到串行缓冲寄存器
while (!TI); // 等待发送完成
TI = 0; // 清除发送完成标志位,准备下一次发送
}
接收数据的代码示例如下:
char ReceiveChar() {
char dat;
while (!RI); // 等待接收完成
dat = SBUF; // 从串行缓冲寄存器读取数据
RI = 0; // 清除接收完成标志位,准备下一次接收
return dat;
}
5.3 串行通信的应用扩展
5.3.1 串行通信在多机通信中的应用
在多机通信中,通常会指定一个或多个设备作为主机,其他的设备作为从机。这种通信模式通常利用地址来区分不同的通信节点,从而实现点对点或多点间的通信。
例如,当需要实现一个主从机通信系统时,可以从机的地址通常在初始化时通过代码配置。主机在发送数据时会在数据帧的开始包含从机的地址,从而确保正确的设备能够响应信息。
5.3.2 串行通信与其他接口的结合使用
在复杂的应用中,串行通信常常与其他类型的接口结合使用以增强系统的功能。比如,可以将串行通信与I2C、SPI等接口集成在一个系统中,实现不同设备间的数据交换。
串行通信也可以作为远程通信的媒介,通过调制解调器与远程计算机进行数据交换。此外,通过扩展模块如GPRS/EDGE/3G/4G模块,微控制器可以接入互联网,实现远程数据的采集和传输。
以上章节详细介绍了串行通信的基本理论和编程实现,并探讨了其在多机通信和与其他接口结合使用时的应用扩展。串行通信的深入理解和实践是提升嵌入式系统设计能力的重要步骤,对于IT和相关行业的专业人士而言,这是一门不可忽视的重要课题。
简介:C51单片机编程是学习8051系列单片机控制的基础。本集合提供了45个精心挑选的实例,覆盖了C51编程的核心概念,如基础语法、中断系统、IO操作、定时器、串行通信、A/D和D/A转换、中断驱动编程、看门狗、I2C和SPI通信、LCD显示、EEPROM存储、PWM控制、数据同步处理以及多任务编程等。这些实例不仅帮助初学者理解理论知识,更能够通过实践提高编程技能,为未来单片机应用开发奠定坚实基础。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 12
12 0
0- 0



 已为社区贡献41条内容
已为社区贡献41条内容

所有评论(0)