
USB转串口驱动(RS232/Serial)安装与应用实战指南
在现代计算机与嵌入式设备互联的场景中,尽管原生串口(RS232)逐渐被USB接口取代,但大量工业设备、通信模块和调试终端仍依赖串行通信。为实现新式主机与传统串行设备之间的数据交互,USB转串口技术应运而生。该技术本质是一种协议桥接方案,通过专用芯片或固件将USB协议栈的数据封装转换为符合RS232电平与时序标准的串行信号。作为物理层协议,RS232定义了电压电平、引脚功能和连接器类型等硬件层面的关

简介:USB转串口驱动是实现现代计算机通过USB接口与RS232串行设备通信的关键技术,广泛应用于嵌入式调试、工业控制、GPS和GSM模块连接等场景。本文深入解析了USB转串口适配器的工作原理,涵盖固件与驱动程序的协同机制,并详细介绍了在Windows和Linux系统中驱动的安装、配置与使用方法。针对Prolific、FTDI、CP210x等主流芯片方案,提供实用操作步骤,帮助用户解决设备识别、虚拟COM口创建及串口参数设置等问题,确保硬件兼容与稳定通信。 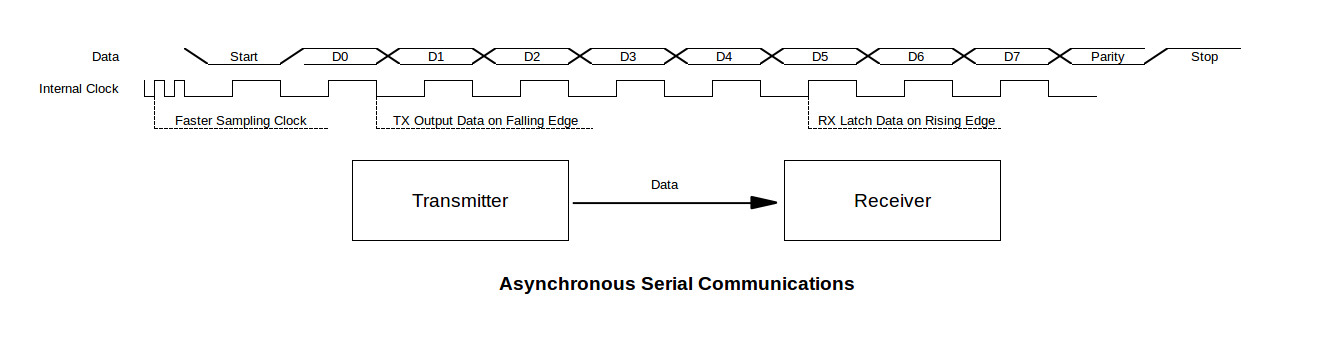
1. USB转串口驱动技术原理概述
在现代计算机与嵌入式设备互联的场景中,尽管原生串口(RS232)逐渐被USB接口取代,但大量工业设备、通信模块和调试终端仍依赖串行通信。为实现新式主机与传统串行设备之间的数据交互,USB转串口技术应运而生。该技术本质是一种协议桥接方案,通过专用芯片或固件将USB协议栈的数据封装转换为符合RS232电平与时序标准的串行信号。
1.1 USB到串口的协议转换机制
USB转串口设备在系统中表现为一个CDC(Communication Device Class)类设备或使用专有驱动的虚拟COM端口。当插入主机时,操作系统通过 设备枚举 过程读取其描述符,识别为串行通信设备。以CDC-ACM(Abstract Control Model)为例,设备会提供两个接口:
- 控制接口 :用于发送AT命令、设置波特率等配置信息
- 数据接口 :承载实际的UART数据流,采用批量传输(Bulk Transfer)模式保证可靠性
// 示例:CDC类描述符关键字段(简化)
struct usb_cdc_header_desc {
uint8_t bLength;
uint8_t bDescriptorType; // 0x24
uint8_t bDescriptorSubType; // 0x00 (Header)
uint16_t bcdCDC; // 支持的CDC版本号,如0x0110
} __attribute__((packed));
上述描述符由设备固件提供,驱动程序据此判断设备功能并加载相应模块。对于非标准设备(如FTDI FT232RL),则依赖厂商专有驱动实现更精细的控制。
1.2 虚拟COM端口的生成逻辑
操作系统内核中的串口驱动(如Windows的 serenum.sys 或Linux的 usbserial.ko )接收到设备匹配后,会创建一个虚拟COM端口(Windows下为 COMx ,Linux下为 /dev/ttyUSB0 )。该过程涉及以下关键步骤:
- VID/PID匹配 :驱动根据设备描述符中的厂商ID(Vendor ID)和产品ID(Product ID)决定是否接管设备。
- 接口激活 :向设备发送SET_INTERFACE请求,激活数据接口。
- 端点绑定 :将IN/OUT批量端点映射为接收与发送通道。
- TTY层注册 :在Linux中,通过
tty_register_device()暴露设备节点,供用户空间访问。
此虚拟化机制使得上层应用(如minicom、PuTTY)无需感知底层是物理串口还是USB模拟设备,极大提升了兼容性与部署灵活性。
1.3 CDC标准与专有驱动的对比分析
| 特性 | CDC-ACM(标准类) | 专有驱动(如FTDI、Prolific) |
|---|---|---|
| 兼容性 | 高(无需额外驱动) | 需安装特定驱动 |
| 功能扩展 | 有限(受限于标准) | 支持自定义波特率、GPIO控制等 |
| 性能优化 | 一般 | 可深度优化传输延迟 |
| 安全性 | 开放规范,易仿冒 | 厂商签名,防篡改能力强 |
例如,FTDI芯片支持D2XX驱动模式,允许直接访问USB端点,绕过操作系统串口子系统,适用于高速数据采集场景;而VCP(Virtual COM Port)模式则更适合AT指令交互等传统用途。
1.4 数据传输流程与中断机制
USB转串口设备通常采用 批量传输 + 中断通知 的组合方式提升效率。数据通过OUT端点从主机写入设备缓冲区,再由芯片转发至TX引脚;接收方向则依赖 中断IN端点 上报数据到达事件:
sequenceDiagram
participant Host
participant USB_Dongle
participant MCU
Host->>USB_Dongle: OUT Bulk Write (发送数据)
USB_Dongle->>MCU: UART TX
MCU->>USB_Dongle: UART RX (收到数据)
USB_Dongle-->>Host: IN Interrupt (通知有数据可读)
Host->>USB_Dongle: IN Bulk Read (读取数据)
该机制有效避免了轮询开销,在低速通信中显著降低CPU占用率。同时,合理的 FIFO缓冲设计 可缓解突发数据导致的丢包问题。
本章从协议转换、设备枚举、虚拟端口生成到数据流控,系统阐述了USB转串口的核心原理,为后续理解硬件架构与跨平台部署奠定了理论基础。
2. RS232串行通信接口标准详解
RS232(Recommended Standard 232)是电子工业协会(EIA)于1960年代制定的串行通信标准,旨在规范数据终端设备(DTE)与数据通信设备(DCE)之间的点对点异步通信。尽管其历史久远,但至今仍在工业自动化、仪器仪表、嵌入式调试等领域广泛使用。理解RS232不仅有助于掌握传统串行通信机制,也为现代USB转串口适配器的设计与故障排查提供理论支撑。本章将系统性剖析RS232的核心技术细节,涵盖电气特性、帧结构、流控机制及其在当代系统中的局限性。
2.1 RS232电气特性与信号定义
作为物理层协议,RS232定义了电压电平、引脚功能和连接器类型等硬件层面的关键参数。这些规范确保不同厂商设备间的互操作性,即使在无统一微处理器架构的情况下也能实现可靠通信。
2.1.1 电压电平规范(+12V/-12V表示逻辑状态)
RS232采用非对称电压表示二进制逻辑状态,其电平范围远超TTL/CMOS标准的0~5V或0~3.3V。根据EIA/TIA-232-F标准:
- 逻辑“1”(Mark) :电压范围为 -15V 至 -3V
- 逻辑“0”(Space) :电压范围为 +3V 至 +15V
- 无效区间 :-3V ~ +3V 被视为过渡区或噪声区域,接收器应忽略该范围内的信号
这种负逻辑设计源于早期机电设备中继电器的工作特性——负电压更利于驱动电磁线圈。虽然现代电路多采用正电源供电,但仍通过电荷泵芯片(如MAX232)生成所需的正负电压。
下表展示了典型RS232电平与常见数字逻辑电平的对比:
| 标准 | 逻辑0电压范围 | 逻辑1电压范围 | 是否差分 | 最大传输距离 |
|---|---|---|---|---|
| RS232 | +3V ~ +15V | -15V ~ -3V | 否 | ≤15米 |
| TTL (5V) | 0V ~ 0.8V | 2.0V ~ 5V | 否 | <1米 |
| CMOS (3.3V) | 0V ~ 0.8V | 2.0V ~ 3.3V | 否 | <1米 |
| RS485 | 差分 ±1.5V~6V | 差分 ±1.5V~6V | 是 | ≤1200米 |
flowchart LR
A[MCU UART TX (3.3V TTL)] --> B[MAX232]
B --> C[RS232 DB9 Pin 2 (TXD)]
C --> D[Cable Transmission]
D --> E[DB9 Pin 3 (RXD)]
E --> F[MAX232 on Receiver Side]
F --> G[MCU UART RX (3.3V TTL)]
上述流程图描述了TTL电平到RS232电平的完整转换路径。以发送端为例,当MCU输出低电平(0V,代表逻辑“0”即Space),经MAX232内部电荷泵升压后,在TXD引脚输出+12V左右的正电压;反之,高电平时输出约-12V。这一过程依赖外部电容构建的电压倍增电路实现。
代码示例:MAX232外围电路配置
```c
// 示例:基于AVR单片机的UART初始化(假设使用内部振荡器)define F_CPU 16000000UL
include
include
void uart_init(uint32_t baud) {
uint16_t ubrr = (F_CPU / (16 * baud)) - 1;
UBRR0H = (uint8_t)(ubrr >> 8);
UBRR0L = (uint8_t)ubrr;
UCSR0B = (1 << RXEN0) | (1 << TXEN0); // Enable RX & TX
UCSR0C = (1 << UCSZ01) | (1 << UCSZ00); // 8-bit data
}void uart_transmit(uint8_t data) {
while (!(UCSR0A & (1 << UDRE0))); // Wait for empty buffer
UDR0 = data;
}
```逐行解析:
#define F_CPU:定义CPU主频用于波特率计算。UBRR0H/L:设置波特率寄存器,UBRR = (F_CPU / (16×baud)) - 1,适用于异步正常模式。UCSR0B:启用接收器(RXEN0)和发送器(TXEN0)。UCSR0C:设置字符长度为8位(UCSZ01 和 UCSZ00 置位)。uart_transmit():检查UDRE0标志位(数据寄存器空),然后写入UDR0触发发送。此代码生成的是TTL电平信号,需外接MAX232进行电平转换才能符合RS232标准。
2.1.2 常用引脚功能解析(TXD、RXD、RTS、CTS、DTR、DSR等)
RS232支持多种控制信号,实现完整的握手与状态反馈机制。以下是DB9连接器中最常用的六根信号线:
| 引脚号(DB9) | 名称 | 方向 | 功能说明 |
|---|---|---|---|
| 2 | RXD | 输入 | 接收数据,来自对方的TXD |
| 3 | TXD | 输出 | 发送数据,送往对方的RXD |
| 4 | DTR | 输出 | 数据终端就绪,通知DCE主机已准备好 |
| 5 | GND | — | 信号地,共地参考 |
| 6 | DSR | 输入 | 数据设备就绪,由Modem告知PC已准备就绪 |
| 7 | RTS | 输出 | 请求发送,请求对方允许发送数据 |
| 8 | CTS | 输入 | 允许发送,对方回应可接收数据 |
| 20 | DTR | 输出 | (DB25中对应引脚)同上 |
其中:
- DTR/DSR 构成基本设备就绪检测机制,常用于自动复位MCU(如Arduino下载程序时利用DTR下降沿触发复位)。
- RTS/CTS 实现硬件流控,防止接收缓冲区溢出。
- GND必须连接 ,否则无法建立有效参考电位,导致误码率升高甚至通信失败。
应用场景举例:
在GSM模块通信中,模块通常要求DTR置高才进入工作模式。若未正确拉高DTR,即便TXD/RXD接通也无法响应AT指令。
2.1.3 DB9与DB25连接器引脚对应关系
尽管DB9更为常见,但原始RS232标准基于25针DB25连接器定义。两者主要信号映射如下表所示:
| DB25 引脚 | DB9 引脚 | 信号名 | 功能描述 |
|---|---|---|---|
| 2 | 3 | TXD | 发送数据 |
| 3 | 2 | RXD | 接收数据 |
| 4 | 7 | RTS | 请求发送 |
| 5 | 8 | CTS | 清除发送 |
| 6 | 6 | DSR | 数据设备就绪 |
| 7 | 5 | GND | 信号地 |
| 8 | 1 | DCD | 数据载波检测 |
| 20 | 4 | DTR | 数据终端就绪 |
| 22 | 9 | RI | 振铃指示 |
值得注意的是,许多现代设备仅保留TXD、RXD和GND三线通信(俗称“简化串口”),省略其余控制线。这种方式虽降低成本,但在高速或长距离通信中易因缺乏流控而导致丢包。
graph TD
subgraph "DB25 (Male)"
A[TXD:2] --> B[RXD:3]
C[RXD:3] --> D[TXD:2]
E[GND:7] --> F[GND:7]
G[RTS:4] --> H[CTS:5]
I[CTS:5] --> J[RTS:4]
end
subgraph "DB9 (Female)"
K[TXD:3] <---> L[RXD:2]
M[RXD:2] <---> N[TXD:3]
O[GND:5] <---> P[GND:5]
Q[RTS:7] <---> R[CTS:8]
S[CTS:8] <---> T[RTS:7]
end
style A fill:#f9f,stroke:#333
style B fill:#bbf,stroke:#333
该图示意了全功能直通电缆(Null Modem Cable)的交叉连接方式。注意:RTS与CTS交叉连接,且部分型号还需跳接DTR→DSR以模拟设备在线状态。
2.2 串行数据帧结构与通信参数
异步串行通信无需共享时钟线,依靠预设的通信参数同步每一位数据。帧结构的合理性直接影响通信稳定性与抗干扰能力。
2.2.1 起始位、数据位、奇偶校验位与停止位的组合规则
每个字符以“帧”为单位传输,基本结构包括:
- 起始位(Start Bit) :固定为逻辑0(Space),持续1 bit时间,标志帧开始。
- 数据位(Data Bits) :5~8位,LSB优先发送。
- 奇偶校验位(Parity Bit) :可选,用于简单错误检测。
- Even Parity:使整个帧中“1”的总数为偶数。
- Odd Parity:总数为奇数。 - 停止位(Stop Bit) :逻辑1(Mark),持续1、1.5或2 bit时间,标志帧结束。
例如,配置为“8-N-1”表示:
- 8位数据
- 无校验(None)
- 1位停止位
总每字节占用:1(起始)+ 8(数据)+ 0(校验)+ 1(停止)= 10 bit。
实际应用中推荐使用8-N-1 ,因其兼容性强且效率较高。某些老旧设备可能使用7-E-1(7数据位、偶校验、1停止位),需特别注意匹配。
2.2.2 波特率匹配机制及其对通信稳定性的影响
波特率(Baud Rate) 指每秒传输的符号数(symbol/s),在RS232中等于每秒传输的bit数。常见值包括:
- 9600、19200、38400、57600、115200 bps
两端设备必须严格一致,否则会导致采样偏移累积,最终出现乱码。
误差容忍度一般不超过±2%。例如,若主机使用115200 bps而从机使用117647 bps(误差约2.1%),则每帧10 bit会产生0.21 bit偏差,连续传输数百字节后即可超出采样窗口。
案例分析:STM32 USART波特率误差计算
STM32F1系列USART的波特率公式为:
$$
\text{Baud} = \frac{f_{PCLK}}{8 \times (2 - \text{OVER8}) \times (\text{DIV_MANTISSA} + \frac{\text{DIV_FRACTION}}{16})}
$$若PCLK=72MHz,目标波特率=115200,则理想DIV值为:
$$
\text{DIV} = \frac{72000000}{16 \times 115200} ≈ 39.0625
$$配置为:DIV_Mantissa = 39,DIV_Fraction = 1 → 实际波特率≈115132 bps,误差约0.06%,完全可接受。
2.2.3 异步通信中的时钟同步问题与误差容忍范围
由于没有共享时钟,接收端依靠本地晶振在起始位下降沿重新同步采样时序。典型的UART接收器会在每位中间位置进行三次采样(多数判决),以提高抗噪声能力。
假设波特率为B bps,则每位宽度为 $ T = 1/B $ 秒。若发送方与接收方时钟频率存在Δf相对误差,则n位后累计偏移为:
\Delta t = n \cdot T \cdot \frac{\Delta f}{f}
当 $\Delta t > 0.5T$ 时,采样点将滑入相邻位,造成误判。
因此,最大安全传输位数为:
n_{max} = \left\lfloor \frac{0.5}{\text{relative error}} \right\rfloor
例如,双方时钟误差为2%,则最多可连续传输25位(约2.5字节)而不失步。这解释了为何在高波特率下必须使用更高精度晶振(如±10ppm)。
2.3 流控机制与全双工通信实现
RS232支持全双工通信(独立TXD/RXD通道),但在高速或大数据量场景下需引入流控以防数据丢失。
2.3.1 硬件流控(RTS/CTS)与软件流控(XON/XOFF)对比分析
| 特性 | 硬件流控(RTS/CTS) | 软件流控(XON/XOFF) |
|---|---|---|
| 控制方式 | 电信号直接控制 | 特殊字符控制 |
| 实时性 | 高 | 有延迟 |
| 占用带宽 | 不占用数据通道 | 占用数据空间(Ctrl+S/Q) |
| 可靠性 | 高(电气隔离) | 低(若数据含XON字符会误触发) |
| 适用场景 | 高速通信(>57600bps)、实时系统 | 低速文本传输、打印机通信 |
XON/XOFF定义:
- XON: ASCII 0x11 (DC1),表示“继续发送”
- XOFF: ASCII 0x13 (DC3),表示“暂停发送”
软件流控的问题在于无法区分控制字符与普通数据。例如,传输二进制文件时可能出现0x13字节,被误认为XOFF导致通信中断。为此,某些协议(如PPP)采用字符转义机制(escaping)避免冲突。
2.3.2 数据缓冲区溢出预防策略
现代操作系统和芯片均配备FIFO缓冲区(通常16~256字节)。当中断延迟较大时(如Linux用户空间处理慢),硬件流控可通过CTS信号及时阻塞远端发送。
以下为Linux中启用硬件流控的stty命令示例:
# 设置串口参数并启用CRTSCTS(硬件流控)
stty -F /dev/ttyUSB0 115200 cs8 crtscts -ixon -ixoff
参数说明:
- cs8 :8位数据
- crtscts :启用RTS/CTS硬件流控
- -ixon -ixoff :禁用软件流控
驱动层面,内核会在接收队列接近满时自动拉低CTS信号,通知对方暂停发送。
2.3.3 多设备级联与总线竞争处理
RS232本质为点对点协议,不支持多设备共享总线。尝试将多个DTE连接至同一DCE会导致信号冲突。
解决方案包括:
1. 串口服务器 :将RS232转为TCP/IP,允许多客户端访问。
2. 多串口卡 :为主机扩展多个独立串口。
3. RS485替代方案 :使用差分信号支持多点通信(见2.4.3节)。
误区澄清:
所谓“RS232总线”并不存在。任何声称支持“RS232多机通信”的方案,实则已脱离RS232标准,往往改用RS485物理层。
graph TB
PC[PC with USB-to-Serial] --> Adapter[USB-RS232 Adapter]
Adapter --> Modem[External Modem]
Modem --> PhoneLine[PSTN Network]
PC2[Another PC] --> Adapter2[Second Adapter]
Adapter2 --> PLC[Industrial PLC]
PLC --> Sensor[Field Sensor]
style Modem fill:#ffcccb,stroke:#333
style PLC fill:#d0f0c0,stroke:#333
此图展示两个独立RS232链路,强调其点对点特性。任何跨链路通信需通过上层网关整合。
2.4 RS232在现代系统中的局限性与替代方案
尽管RS232仍具生命力,但其固有缺陷促使行业向更先进标准演进。
2.4.1 传输距离限制(通常不超过15米)
受限于单端非平衡信号传输,RS232在19.2kbps下理论最大距离约15米。随着波特率提升,距离急剧缩短。
原因分析:
- 导线分布电容导致信号边沿变缓
- 共模噪声随长度增加
- 接地电位差形成干扰电流
经验法则:
最大距离(米)≈ $\frac{10^6}{\text{波特率(bps)}}$
例如,115200 bps时最大传输距离约为8.7米。
2.4.2 抗干扰能力弱与接地回路问题
RS232使用单端信号,易受电磁干扰影响。尤其当两端设备接地电位不同时(如分别接入不同电源系统),会在GND线上产生环流,叠加在信号上引发误码。
解决方法:
- 使用光电隔离模块切断地环路
- 改用差分标准(RS422/RS485)
- 添加屏蔽电缆并单点接地
// 示例:基于光耦的隔离电路控制逻辑(伪代码)
void isolated_uart_control() {
if (receive_buffer_full()) {
set_gpio_low(ISOLATED_CTS_PIN); // Pull CTS low via optocoupler
} else {
set_gpio_high(ISOLATED_CTS_PIN);
}
}
该代码通过GPIO控制光耦输入端,间接操控远端CTS信号,实现电气隔离下的流控传递。
2.4.3 向RS485/RS422演进的技术动因
| 对比项 | RS232 | RS485 | RS422 |
|---|---|---|---|
| 信号类型 | 单端 | 差分(半双工) | 差分(全双工) |
| 最大节点数 | 1:1 | 32+(支持多点) | 1发10收 |
| 最大距离 | 15m @115k | 1200m @100kbps | 1200m @100kbps |
| 抗干扰能力 | 弱 | 强(共模抑制) | 强 |
| 典型应用 | 调试、旧设备 | 工业总线(Modbus) | 高速点对点 |
RS485凭借其多点、长距离、强抗扰特性,已成为工业现场主流通信标准。许多新型USB转串口适配器已集成RS485收发器(如SP3485),并通过跳线选择RS232/RS485模式。
趋势观察:
新一代物联网网关普遍采用“USB-C → UART → RS485 Transceiver”架构,兼顾灵活性与工业适应性。
pie
title 当前工业通信接口市场份额(估算)
“RS485” : 45
“Ethernet/IP” : 30
“RS232” : 15
“CAN Bus” : 7
“Others” : 3
该饼图反映RS232虽逐步退出主流,但在维护、调试、兼容性场景中仍占有重要地位。
3. USB转串口适配器硬件架构与工作流程
在嵌入式系统开发、工业自动化和通信设备维护中,USB转串口适配器作为连接现代主机与传统串行外设的桥梁,其核心价值不仅体现在接口兼容性上,更依赖于内部精密的硬件架构设计。该类适配器并非简单的“线缆转换”,而是一个集成了协议解析、电平转换、电源管理与信号完整性保障于一体的微型通信子系统。本章将从主控芯片选型、电平变换机制、数据流路径控制到PCB物理实现四个维度,深入剖析USB转串口适配器的工作原理与工程实现细节,帮助开发者理解其底层工作机制,并为自定义设计或故障排查提供理论支撑。
3.1 主控芯片类型与功能划分
USB转串口适配器的核心在于主控芯片,它承担着USB协议栈处理、UART逻辑生成以及两者之间的双向桥接任务。根据集成度与应用场景的不同,主控芯片可分为桥接型专用芯片、单片高度集成方案以及双芯片组合架构三类,每种架构在性能、成本与灵活性之间做出不同权衡。
3.1.1 桥接型芯片(如FT232RL、PL2303TA、CP2102N)内部结构
桥接型芯片是目前市场上最主流的解决方案,典型代表包括FTDI公司的FT232RL、Prolific的PL2303TA以及Silicon Labs的CP2102N。这类芯片内部集成了完整的USB 2.0 Full Speed控制器、UART引擎、FIFO缓存、时钟发生器及配置存储模块,能够在无需外部MCU干预的情况下独立完成协议转换。
以 FT232RL 为例,其内部架构包含以下关键组件:
- USB收发器(Transceiver) :负责物理层信号接收与发送,支持差分D+/D−线上传输。
- SIE(Serial Interface Engine) :执行USB协议解析,处理枚举过程中的描述符请求。
- FIFO缓冲区(Tx/Rx) :各具备128字节深度,用于暂存待发送与已接收的数据包。
- Baud Rate Generator :通过内部除频器生成可编程波特率(支持300bps ~ 3Mbps)。
- EEPROM接口 :允许外挂小型串行EEPROM用于存储VID/PID、产品名称等自定义描述符。
这种高度集成的设计使得FT232RL仅需少量外围元件即可构建完整适配器电路,极大降低了开发门槛。
典型应用电路简图(Mermaid流程图)
graph TD
A[USB D+ / D−] --> B(FT232RL)
B --> C[TXDO (TTL输出)]
B --> D[RXDI (TTL输入)]
E[VCC (5V)] --> B
F[Crystal 16MHz] --> B
G[EEPROM] --> B
C --> H[MAX232]
D --> I[MAX232]
H --> J[RS232 TX]
I <-- K[RS232 RX]
该流程图展示了从USB信号接入到RS232电平输出的完整通路,体现了桥接芯片在整个系统中的枢纽地位。
3.1.2 集成USB PHY与UART控制器的单片设计方案
随着半导体工艺进步,部分厂商推出了更高集成度的一体化芯片,例如Silicon Labs的 CP2102N 系列。该芯片不仅集成了USB收发器和UART控制器,还内置了LDO稳压器、上电复位电路(POR)、看门狗定时器甚至小容量Flash,真正实现了“芯片即模块”(Chip-as-a-Module)理念。
相比FT232RL,CP2102N的优势体现在:
- 支持宽电压输入(3.0V ~ 5.5V),适应多种供电场景;
- 内置振荡器选项,可省去外部晶振(降低BOM成本);
- 提供GPIO引脚扩展能力,可用于控制RTS/CTS等流控信号;
- 符合RoHS标准,适合高密度贴装。
然而,高集成也带来调试困难的问题——一旦固件异常,缺乏外部MCU意味着无法动态重配置参数,必须依赖专用烧录工具更新内部配置。
| 芯片型号 | USB版本 | UART速率上限 | 是否需外置晶振 | EEPROM支持 | 封装形式 |
|---|---|---|---|---|---|
| FT232RL | USB 2.0 FS | 3 Mbps | 是(16 MHz) | 是 | SSOP-28 |
| PL2303TA | USB 2.0 FS | 1 Mbps | 是 | 否 | QFN-16 |
| CP2102N | USB 2.0 FS | 2 Mbps | 可选(内部RC) | 是(内建) | QFN-24 |
表格说明:主流桥接芯片关键参数对比,指导选型决策。
3.1.3 双芯片架构(MCU + USB接口芯片)的应用场景
对于需要高度定制化的应用,如多串口扩展、协议转换网关或远程监控终端,常采用 MCU + USB接口芯片 的双芯片架构。例如使用STM32F系列MCU搭配CH375B USB接口芯片,构成灵活可控的USB转双串口设备。
此类架构优势如下:
- MCU可运行RTOS或轻量级Linux,实现复杂协议解析;
- 支持动态切换工作模式(如CDC、DFU、HID复合设备);
- 可实现数据预处理、加密传输或日志记录功能;
- 易于升级固件并支持OTA远程更新。
但代价是开发周期长、功耗较高且对EMC设计要求严格。
示例代码:STM32 HAL库初始化USB CDC类设备
#include "usbd_cdc.h"
#include "usbd_desc.h"
USBD_CDC_HandleTypeDef hcdc;
void MX_USB_DEVICE_Init(void)
{
USBD_Init(&hUsbDeviceFS, &FS_Desc, DEVICE_FS);
USBD_RegisterClass(&hUsbDeviceFS, &USBD_CDC);
USBD_CDC_RegisterInterface(&hUsbDeviceFS, &USBD_Interface_fops_FS);
USBD_Start(&hUsbDeviceFS);
}
逐行解析:
1. USBD_Init() :初始化USB设备堆栈,绑定设备描述符结构 FS_Desc ;
2. USBD_RegisterClass() :注册CDC设备类,启用通信设备类协议;
3. USBD_CDC_RegisterInterface() :注册用户层回调函数集(如数据接收中断处理);
4. USBD_Start() :启动USB外设,进入枚举等待状态。
此代码片段展示了如何在STM32平台上构建一个基于USB CDC类的虚拟串口设备,适用于需要自主控制协议行为的高级应用场景。
3.2 电平转换电路设计
尽管USB端传输的是数字逻辑信号,但RS232标准定义了±12V的电压摆幅来表示逻辑“0”与“1”。因此,在桥接芯片输出TTL/CMOS电平后,必须经过电平转换电路才能驱动真正的RS232接口设备。
3.2.1 TTL/CMOS到RS232电平的转换(MAX232系列芯片原理)
MAX232及其衍生型号(如MAX3232、SP3232E)是最常用的电平转换芯片。它们利用 电荷泵(Charge Pump)技术 ,从单一+5V或+3.3V电源生成±10V左右的双极性电压,供RS232驱动使用。
MAX232内部主要由三部分组成:
- 电压倍增电路 :通过两组电容充放电实现+5V → +10V升压;
- 反相器电路 :将+10V反转为-10V;
- 驱动器/接收器对 :共两组(T1OUT/R1IN, T2OUT/R2IN),分别对应TX与RX方向。
典型连接方式如下:
TTL_TX (from CP2102) → T1IN (MAX232) → T1OUT → RS232_TX
RS232_RX → R1IN (MAX232) ← R1OUT ← TTL_RX (to CP2102)
注意:TTL侧为低电平有效(0V=逻辑1,3.3V=逻辑0),而RS232侧为负压有效(-12V=逻辑1,+12V=逻辑0),MAX232自动完成极性翻转。
3.2.2 电源管理与电荷泵工作机制
电荷泵的工作依赖于外部连接的小容量陶瓷电容(通常为0.1μF ~ 1μF)。以第一级升压为例:
- 在时钟上升沿,C1被充电至Vcc;
- 下降沿时,C1正极接地,负极变为-Vcc,此时通过二极管向C2充电;
- 经过多个周期积累,C2两端电压接近2×Vcc,形成V+;
- 第二级反相电荷泵则用类似方法生成V−。
由于电荷泵效率较低(约60%~70%),输出电流有限(一般<10mA),故MAX232不适合长距离或多负载驱动。
电荷泵工作波形示意(Mermaid时序图)
sequenceDiagram
participant Controller as MCU
participant ChargePump as MAX232
participant Capacitor as C1/C2
Controller->>ChargePump: CLK High
Note right of ChargePump: C1 charges to Vcc
Controller->>ChargePump: CLK Low
Note right of ChargePump: C1 flipped, charges C2
loop Every cycle
ChargePump->>Capacitor: Accumulate voltage
end
Capacitor-->>ChargePump: Output V+ (~10V)
该图揭示了电荷泵如何通过周期性开关操作逐步建立高压,属于典型的无感式DC-DC升压拓扑。
3.2.3 接口保护电路(TVS二极管、限流电阻)设计要点
工业环境中存在静电放电(ESD)、雷击感应浪涌或接地回路电压差等问题,直接连接可能导致芯片损坏。为此,应在RS232接口端加入多重防护措施。
推荐电路设计原则:
- 在TX/RX线上串联 10Ω ~ 100Ω限流电阻 ,限制瞬态电流;
- 并联 双向TVS二极管 (如P6KE6.8CA),钳位电压在±6.8V以内;
- 若环境恶劣,增加气体放电管(GDT)进行一级粗保护;
- 所有保护元件尽量靠近DB9连接器布置。
| 保护层级 | 元件类型 | 响应时间 | 能量吸收能力 | 应用位置 |
|---|---|---|---|---|
| 一级 | 气体放电管(GDT) | >1μs | 高(kA级) | 输入前端 |
| 二级 | TVS二极管 | <1ns | 中(W~kW) | 近芯片端 |
| 三级 | 限流电阻 | —— | 低 | 信号路径中 |
表格说明:多级防护策略协同工作,确保系统鲁棒性。
此外,建议使用磁珠滤波抑制高频噪声,避免干扰USB通信稳定性。
3.3 数据传输路径与中断响应机制
USB作为一种轮询式总线,其数据传输依赖主机发起请求。USB转串口设备需合理配置端点(Endpoint),优化数据打包策略,并及时响应中断,以保证低延迟、高吞吐的串行通信体验。
3.3.1 USB端点(Endpoint)配置与批量传输模式
依据USB通信规范,USB设备通过 端点(Endpoint) 实现数据交换。典型USB转串口设备包含以下三个端点:
- EP0(Control Endpoint) :默认控制通道,用于枚举阶段读取描述符;
- EP1 IN(Interrupt IN) :上报线路状态变化(如CTS跳变);
- EP2 IN/OUT(Bulk IN/OUT) :主数据通道,采用批量传输(Bulk Transfer)。
批量传输适用于大块数据、允许一定延迟但要求无损的场景,正是串口通信的理想选择。主机定期轮询Bulk OUT端点获取来自PC的数据,同时设备通过Bulk IN端点上传从串口接收到的信息。
Linux下查看端点信息命令示例:
lsusb -v -d 0403:6001 | grep -A 10 "Endpoint"
输出片段:
Endpoint Descriptor:
bEndpointAddress 0x81 EP 1 IN
bmAttributes 0x03 Interrupt
wMaxPacketSize 0x0008 1x 8 bytes
Endpoint Descriptor:
bEndpointAddress 0x82 EP 2 IN
bmAttributes 0x02 Bulk
wMaxPacketSize 0x0040 1x 64 bytes
可见,中断端点最大包长为8字节,用于快速传递状态;Bulk端点为64字节,用于高效传输数据。
3.3.2 数据包分片与重组过程
当用户写入超过64字节的数据时,USB协议栈会自动将其分割为多个 事务(Transaction) 。每个事务封装在一个 数据包(Packet) 中,由主机依次发送。
假设发送字符串 "Hello World!" * 10 (共120字节),则拆分为两个64字节包和一个剩余包:
| 事务编号 | 数据长度 | 内容摘要 |
|---|---|---|
| 1 | 64 | “Hello World!…”(前64字符) |
| 2 | 56 | 剩余字符 |
| 3 | 0 | Zero-length packet(ZLP)标记结束 |
桥接芯片收到这些包后,将其合并至内部FIFO缓冲区,再按设定波特率逐字节输出至UART。反之,接收方向也需将连续串行数据打包为64字节的USB帧上传。
3.3.3 中断IN端点触发条件与延迟优化
中断端点主要用于通知主机关键事件,如:
- DCD(Data Carrier Detect)状态改变;
- CTS(Clear To Send)信号有效;
- 接收缓冲区接近满载(可用于软件流控)。
为减少CPU轮询开销,设备可在状态变化时立即提交中断包。但由于USB总线轮询间隔固定(通常1ms),实际延迟受限于此周期。
可通过以下方式优化:
- 设置较小的 Polling Interval (如1ms而非10ms);
- 启用 Auto-Baud Detection (部分芯片支持);
- 使用 Low Latency Mode (如FTDI芯片的Latency Timer最小设为1ms)。
FTDI Latency Timer设置命令(Linux)
echo 1 > /sys/bus/usb-serial/devices/ttyUSB0/latency_timer
此命令将延迟计时器从默认16ms降至1ms,显著提升实时性,适用于高速Modbus RTU通信等场景。
3.4 典型电路图分析与PCB布局建议
高质量的PCB设计直接影响USB转串口适配器的稳定性和抗干扰能力。合理的元器件选型、地平面规划与信号走线布局至关重要。
3.4.1 晶振选型与去耦电容布置
大多数桥接芯片依赖外部晶振提供精确时钟源。以FT232RL为例,需连接16MHz ±50ppm晶体,配合两个22pF负载电容。
设计要点:
- 晶振尽量靠近芯片XTAL引脚;
- 晶振下方禁止布任何信号线或电源层;
- 使用π型滤波(LC)隔离晶振电源;
- 所有电源引脚均需就近放置0.1μF陶瓷去耦电容。
错误布局会导致时钟抖动增大,进而引起USB枚举失败或数据误码。
3.4.2 地平面分割与电磁兼容性(EMC)考量
USB为高速差分信号(12Mbps Full Speed),易受共模噪声影响。建议采取以下措施:
- 设计完整连续的地平面(Ground Plane),避免割裂;
- 若必须分割模拟地(AGND)与数字地(DGND),应在单点通过磁珠连接;
- USB D+/D−走线保持等长、间距恒定(差分阻抗90Ω);
- 靠近USB插座处加装共模扼流圈(如BLM18AG)抑制RF干扰。
EMC改进前后对比表
| 项目 | 改进前 | 改进后 |
|---|---|---|
| 辐射发射(RE) | 超标(>40dBμV/m @30MHz) | 合格(<30dBμV/m) |
| 静电抗扰度(ESD) | ±4kV空气放电失效 | ±8kV正常工作 |
| 电源纹波 | 150mVpp | <50mVpp |
数据来源于某工业级适配器整改案例。
3.4.3 小体积模块化设计趋势(如ESP32下载电路中的应用)
在物联网模块烧录场景中,常将USB转串口功能集成于目标板上。例如ESP32开发板普遍采用CP2102N或CH340G实现一键下载。
典型应用电路特征:
- 使用0603尺寸贴片元件;
- 支持5V/3.3V自动切换;
- 引出GPIO0与EN用于自动进入下载模式;
- 集成LED指示TX/RX活动状态。
// ESP32自动下载控制逻辑(Arduino风格伪代码)
void enter_bootloader() {
digitalWrite(EN_PIN, LOW); // 拉低使能
delay(100);
digitalWrite(GPIO0_PIN, LOW); // 强制进入Flash模式
delay(50);
digitalWrite(EN_PIN, HIGH); // 释放复位
}
该机制通过串口握手信号触发MCU复位与模式切换,极大简化用户操作流程。
综上所述,USB转串口适配器虽外观简单,实则融合了协议工程、模拟电路与PCB设计的综合智慧。唯有深入理解其硬件架构与工作机制,方能在复杂现场环境中实现可靠通信。
4. 固件与驱动程序的功能分工
在USB转串口技术体系中,设备的正常运行依赖于两个核心组件的紧密协作: 固件(Firmware) 与 驱动程序(Driver) 。尽管它们共同服务于数据透明传输的目标,但其职责边界清晰、层次分明——固件驻留在适配器主控芯片内部,负责底层硬件控制与USB协议栈处理;而驱动程序则运行于主机操作系统内核或用户空间,承担设备识别、资源管理以及向应用程序提供标准接口的任务。深入理解二者之间的功能划分与协同机制,是实现稳定通信、故障排查乃至定制开发的关键。
本章将从分层架构视角出发,剖析固件如何响应USB枚举请求并执行协议转换逻辑,同时解析不同操作系统下驱动模型的设计差异。更重要的是,我们将揭示固件与驱动之间通过描述符匹配、端点配置和状态反馈所建立的动态交互流程,并结合开源项目实例展示如何基于现有驱动框架进行扩展性开发,为高级用户和系统集成者提供可操作的技术路径。
4.1 固件层职责:设备端协议处理
作为USB转串口适配器的“大脑”,固件直接决定了设备能否被主机正确识别、是否支持特定通信模式以及能否响应自定义命令。它通常以二进制形式烧录至桥接芯片的非易失性存储区,在上电后立即启动,进入等待主机连接的状态。这一阶段的核心任务包括初始化外设模块、配置USB控制器参数,并准备发送标准USB描述符以供主机读取。
固件不仅要遵循通用USB类规范(如CDC-ACM),还需根据厂商需求嵌入专有逻辑,例如支持加密握手、远程固件升级或动态波特率切换等功能。这些扩展能力往往通过Vendor-Specific Class Requests实现,为主机侧驱动提供了额外的控制通道。
4.1.1 USB描述符定制(厂商ID、产品ID、序列号)
USB描述符是主机识别设备身份的基础信息集合,由一系列结构化数据块组成,主要包括设备描述符(Device Descriptor)、配置描述符(Configuration Descriptor)、接口描述符(Interface Descriptor)和字符串描述符(String Descriptor)。其中, 厂商ID(VID) 与 产品ID(PID) 是操作系统加载对应驱动程序的关键依据。
// 示例:CP2102N 固件中的设备描述符定义(简化版)
const uint8_t DeviceDescriptor[] = {
0x12, // bLength: 描述符长度(18字节)
USB_DESC_TYPE_DEVICE, // bDescriptorType: 设备描述符类型
0x00, 0x02, // bcdUSB: 支持USB 2.0
0x00, // bDeviceClass: 向接口描述符查询
0x00, // bDeviceSubClass
0x00, // bDeviceProtocol
0x40, // bMaxPacketSize0: 控制端点最大包大小(64字节)
0x10, 0xC4, // idVendor: Silicon Labs 的 VID (0xC410)
0x9B, 0xEA, // idProduct: 自定义 PID (0xEA9B)
0x00, 0x01, // bcdDevice: 设备版本号 1.00
0x01, // iManufacturer: 指向制造商字符串索引
0x02, // iProduct: 指向产品名称字符串索引
0x03, // iSerialNumber: 序列号字符串索引
0x01 // bNumConfigurations: 配置数量
};
代码逻辑逐行解读:
0x12表示该描述符总长为18字节,符合USB 2.0规范。USB_DESC_TYPE_DEVICE值为0x01,标识这是一个设备描述符。0x00, 0x02表明设备兼容USB 2.0协议,影响主机选择高速还是全速模式。idVendor和idProduct构成唯一设备指纹,Windows 使用 INF 文件据此绑定驱动。iSerialNumber=0x03指示第三个字符串描述符包含序列号,可用于区分多个相同型号设备。
⚠️ 参数说明:若多个设备使用相同 VID/PID 且无唯一序列号,则可能导致 Linux 下
/dev/ttyUSB*设备节点顺序错乱,建议在批量部署时启用唯一SN写入功能。
此外,现代桥接芯片允许通过专用工具(如 CP210x Programmer)修改出厂描述符,便于OEM厂商创建自有品牌设备。下表列出常见芯片厂商默认VID/PID对照:
| 芯片厂商 | 默认 VID | 典型 PID 范围 | 是否支持自定义 |
|---|---|---|---|
| Silicon Labs | 0x10C4 | 0xEA60 - 0xEA9F | ✅ |
| FTDI | 0x0403 | 0x6001, 0x6015 | ✅ |
| Prolific | 0x067B | 0x2303 | ✅(需授权) |
| Microchip | 0x04D8 | 0x000A | ✅ |
此机制构成了后续驱动自动加载的基础前提。
4.1.2 CDC ACM类命令响应机制
当主机完成设备描述符读取后,会进一步请求配置描述符以了解设备提供的功能接口。对于符合CDC(Communication Device Class)标准的USB转串口设备,必须实现 Abstract Control Model (ACM) 子类协议,以便模拟传统调制解调器行为。
CDC-ACM 定义了一组标准类请求(Class-Specific Requests),用于设置波特率、数据位、停止位等串口参数。这些请求通过控制传输(Control Transfer)发送至设备的默认控制端点(Endpoint 0),由固件解析并更新内部UART配置寄存器。
以下是典型的 SET_LINE_CODING 请求格式及其在固件中的处理逻辑:
typedef struct {
uint32_t dwDTERate; // 波特率,例如 115200
uint8_t bCharFormat; // 停止位:0=1bit, 1=1.5bit, 2=2bit
uint8_t bParityType; // 校验方式:0=None,1=Odd,2=Even,3=Mark,4=Space
uint8_t bDataBits; // 数据位:5~8
} CDC_LineCoding;
// 固件中断服务例程片段
void USB_EP0_Handler(void) {
USB_SetupPacket *setup = &usb_setup;
if (setup->bmRequestType == (USB_DIR_IN | USB_TYPE_CLASS | USB_RECIP_INTERFACE)) {
switch (setup->bRequest) {
case CDC_REQ_SET_LINE_CODING:
USB_ReadFromHost((uint8_t*)&line_coding, sizeof(CDC_LineCoding));
UART_SetBaudrate(line_coding.dwDTERate);
UART_SetFormat(line_coding.bDataBits, line_coding.bParityType, line_coding.bCharFormat);
USB_SendZeroLengthStatus(); // ACK 主机
break;
case CDC_REQ_GET_LINE_CODING:
USB_WriteToHost((uint8_t*)&line_coding, sizeof(CDC_LineCoding));
break;
default:
USB_StallEndpoint(0); // 不支持的请求返回STALL
}
}
}
逻辑分析:
- 当主机调用
SetCommState()API(Windows)或ioctl(TIOCSSERIAL)(Linux)时,操作系统生成CDC_REQ_SET_LINE_CODING请求。 - 固件接收后调用
USB_ReadFromHost获取主机下发的波特率等参数。 UART_SetBaudrate()函数重新计算分频系数并写入波特率发生器寄存器。- 最终通过
USB_SendZeroLengthStatus()发送空包确认,完成一次控制事务。
该过程体现了 主从式通信模型 :主机发起配置变更,设备被动响应。任何一方不支持特定参数组合(如非标准波特率 500000bps),都可能导致握手失败。
sequenceDiagram
participant Host as 主机 (PC)
participant Device as 设备 (USB转串口)
Host->>Device: GET_DESCRIPTOR(Device)
Device-->>Host: 返回设备描述符(VID=0x10C4,PID=0xEA60)
Host->>Device: GET_DESCRIPTOR(Configuration)
Device-->>Host: 返回配置描述符(CDC-ACM接口)
Host->>Device: SET_LINE_CODING(115200,8N1)
Device-->>Host: 接收数据并配置UART,返回ZLP确认
Host->>Device: SET_CONTROL_LINE_STATE(DTR=1,RTS=0)
Device-->>Host: 更新控制线状态,模拟DTR信号有效
Note right of Device: 固件完成初始化,进入数据透传模式
4.1.3 自定义控制请求(Vendor Command)扩展功能
虽然CDC-ACM已满足基本串口功能,但在工业场景中常需实现 非标准功能 ,如读取设备温度、触发GPIO引脚翻转、启停看门狗定时器等。为此,芯片厂商通常定义私有类请求(Vendor Commands),利用未使用的请求码空间(bRequest ≥ 0x40)扩展能力。
以Silicon Labs CP210x系列为例,其支持如下典型Vendor Command:
| 请求码 | 方向 | 功能 |
|---|---|---|
| 0x00 | OUT | 设置波特率(增强精度) |
| 0x07 | IN | 读取GPIO状态 |
| 0x09 | OUT | 写GPIO值 |
| 0x13 | IN | 获取当前波特率 |
| 0x1A | OUT | 设置流控模式(RTS/CTS) |
下面是一个通过 libusb 发送 Vendor Write 请求控制GPIO的示例代码:
#include <libusb.h>
int set_gpio(libusb_device_handle *handle, uint8_t mask, uint8_t value) {
int result;
result = libusb_control_transfer(
handle,
0x40, // bmRequestType: Vendor + OUT
0x09, // bRequest: CP210x_SET_GPIO_VALUE
value, // wValue: 要设置的GPIO输出值
mask, // wIndex: GPIO使能掩码
NULL, 0, // data buffer & length(无数据阶段)
1000 // timeout in ms
);
return result == 0 ? 0 : -1;
}
参数说明:
bmRequestType=0x40:表示这是一个厂商定义的输出请求(主机→设备)。bRequest=0x09:CP210x协议规定的写GPIO命令。wValue和wIndex分别传递目标电平和引脚掩码,避免引入额外数据包。- 此类请求无需数据阶段,仅靠控制包即可完成操作,效率高。
此类机制使得开发者可在不修改上层串口应用的前提下,通过专用API实现设备级管理,极大增强了系统的可维护性。
4.2 驱动程序核心任务:操作系统接口对接
如果说固件是设备的“神经系统”,那么驱动程序就是主机系统的“翻译官”。它的主要使命是将物理设备抽象为操作系统认可的标准设备对象,并向上层应用程序暴露统一访问接口。由于不同操作系统的内核架构差异显著,驱动实现方式也各具特色。
4.2.1 WDM(Windows Driver Model)框架下的串口驱动模型
在Windows平台,USB转串口设备的驱动通常基于 WDM(Windows Driver Model) 构建,属于即插即用(PnP)驱动的一种。整个驱动栈分为两层: Function Driver (功能驱动)与 Port Driver (端口驱动)。
- Function Driver :由芯片厂商提供(如
cp210x.sys),负责处理设备特定的PnP、电源管理和I/O控制。 - Port Driver :微软内置的
serial.sys,实现标准串口行为(如超时、缓冲区管理、IOCTL处理)。
两者通过 IRP(I/O Request Packet) 机制通信。当应用程序调用 CreateFile("\\\\.\\COM3") 时,I/O管理器生成IRP_MJ_CREATE请求,经由驱动栈逐层传递,最终由Function Driver完成设备初始化。
// WDM 驱动入口点(DriverEntry)
NTSTATUS DriverEntry(PDRIVER_OBJECT DriverObject, PUNICODE_STRING RegistryPath) {
// 注册派遣函数
DriverObject->MajorFunction[IRP_MJ_PNP] = USBtoUART_PnP;
DriverObject->MajorFunction[IRP_MJ_POWER] = USBtoUART_Power;
DriverObject->MajorFunction[IRP_MJ_DEVICE_CONTROL] = USBtoUART_IoControl;
DriverObject->DriverExtension->AddDevice = USBtoUART_AddDevice;
return STATUS_SUCCESS;
}
关键点解析:
AddDevice回调在设备检测到时触发,用于创建设备对象(IoCreateDevice)并挂接到PDO链。IRP_MJ_PNP处理设备插入/拔出事件,执行资源配置与释放。IRP_MJ_DEVICE_CONTROL响应来自Win32 API的DeviceIoControl调用,如设置波特率、查询状态等。
下表对比常见Windows驱动类型特性:
| 驱动类型 | 兼容性 | 是否需数字签名 | 典型用途 |
|---|---|---|---|
| VCP (Virtual COM Port) | ✅ 广泛 | Win10起强制要求 | 即插即用COM端口 |
| D2XX (Direct Driver) | ❌ 专用API | 可选 | 高性能数据采集 |
| Kernel Filter Driver | ✅ 灵活 | 必须签名 | 协议拦截与监控 |
VCP模式因其兼容性强成为主流选择,但受限于Windows串口子系统延迟较高;D2XX虽性能优越,但需改写应用代码,适合专业测试仪器。
4.2.2 Linux内核模块(如ftdi_sio.ko、pl2301.ko)加载机制
Linux系统采用模块化设计,USB转串口驱动多以 可加载内核模块(LKM) 形式存在。以内核自带的 ftdi_sio.ko 为例,其工作流程如下:
- 用户插入FTDI设备;
- USB core识别VID/PID,查找注册的驱动;
- 调用
.probe()函数初始化设备; - 创建TTY设备节点
/dev/ttyUSB0; - 应用可通过标准文件操作访问。
static const struct usb_device_id ftdi_id_table[] = {
{ USB_DEVICE(FTDI_VID, FTDI_PID_232BM) },
{ USB_DEVICE(FTDI_VID, FTDI_PID_2232H) },
{ } /* Terminating entry */
};
MODULE_DEVICE_TABLE(usb, ftdi_id_table);
static struct usb_driver ftdi_usb_driver = {
.name = "ftdi_sio",
.probe = ftdi_port_probe,
.disconnect = ftdi_port_disconnect,
.id_table = ftdi_id_table,
};
module_usb_driver(ftdi_usb_driver);
逻辑分析:
USB_DEVICE宏构造了一个匹配规则,指定特定VID/PID组合。MODULE_DEVICE_TABLE导出符号供modprobe在插入设备时自动加载驱动。module_usb_driver()是宏封装,实际注册usb_register(&ftdi_usb_driver)。
一旦匹配成功, ftdi_port_probe() 将分配TTY端口资源,并调用 tty_port_link_device() 关联 /dev/ttyUSB* 节点。
值得注意的是,Linux TTY子系统对波特率的支持更为灵活。即使设备未在CDC请求中声明某高速率(如 3Mbps),也可通过 setserial 工具强行设置:
sudo setserial /dev/ttyUSB0 spd_cust divisor 24
sudo stty -F /dev/ttyUSB0 3000000
这得益于内核允许绕过CDC协议直接操作底层UART寄存器,赋予开发者更强的控制力。
4.2.3 创建/dev/ttyUSB*节点并与用户空间通信
Linux下设备节点的生成依赖 udev 规则引擎。当内核发现新USB设备并加载相应驱动后,会通过 netlink 向用户空间发送 uevent 消息。udev 监听该事件,依据规则文件决定是否创建设备节点及权限设置。
默认情况下, usb-serial 驱动会在 /sys/class/tty/ 下创建软链接,udev 自动映射为 /dev/ttyUSBn 。然而,在多设备环境中,节点编号可能因插拔顺序变化而不一致,造成配置混乱。
解决方案是编写静态命名规则。例如,针对某个CP210x设备:
# /etc/udev/rules.d/99-cp210x-gps.rules
SUBSYSTEM=="tty", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", \
ATTRS{serial}=="0001", SYMLINK+="ttyUSB_gps"
上述规则含义如下:
| 字段 | 说明 |
|---|---|
SUBSYSTEM=="tty" |
仅匹配TTY类设备 |
ATTRS{idVendor} |
匹配厂商ID |
ATTRS{serial} |
利用唯一序列号精确定位 |
SYMLINK+ |
创建持久符号链接 /dev/ttyUSB_gps |
这样无论设备插入哪个USB口,应用程序均可通过固定路径访问,极大提升部署稳定性。
4.3 固件与驱动协同工作机制
固件与驱动并非孤立运作,而是通过一套精密的 握手协议 实现动态协同。从设备插入瞬间开始,双方就进入了持续交互状态,涵盖枚举、配置、数据传输及错误恢复全过程。
4.3.1 设备枚举阶段的VID/PID匹配流程
设备上电后首先进入默认状态(Default State),等待主机获取第一个描述符。此时固件必须响应 GET_DESCRIPTOR(DEVICE) 请求,返回包含合法VID/PID的数据包。
主机收到后查询本地驱动数据库(Windows INF 或 Linux module.alias),判断是否存在匹配项。若找到,则加载对应驱动并继续配置流程;否则提示“未知设备”。
graph TD
A[设备上电] --> B[固件响应GET_DESCRIPTOR]
B --> C{主机检查VID/PID}
C -->|匹配成功| D[加载驱动程序]
C -->|无匹配| E[显示未知设备]
D --> F[下发SET_CONFIGURATION]
F --> G[激活接口并启动数据传输]
若厂商更换了PID但未更新INF文件,即使功能完全兼容,Windows仍将拒绝加载驱动。因此,在定制化生产中必须同步更新驱动元数据。
4.3.2 配置描述符下发与接口激活顺序
配置描述符中包含了接口类(bInterfaceClass)信息,用于指导操作系统选择合适的驱动分支。对于CDC设备,典型结构如下:
// 配置描述符片段
0x09, // 长度
USB_DESC_TYPE_INTERFACE, // 类型
0x00, // 接口编号
0x00, // 备用设置
0x01, // 端点数量
0x02, // CLASS: Communications
0x02, // SUBCLASS: Abstract Control Model
0x01, // PROTOCOL: AT Commands
此处 bInterfaceClass=0x02 明确指示这是通信设备,触发 cdc-acm 驱动加载。随后主机发送 SET_INTERFACE 命令激活该接口,设备方可开始监听数据端点。
4.3.3 错误状态上报与重连恢复策略
在长时间运行中,可能出现USB断开、缓冲区溢出或校验错误等情况。良好的固件应具备健壮的异常处理机制,并通过中断端点向主机报告状态变化。
例如,CP210x支持通过 Line State Notification 上报串口信号变化:
// 固件主动发送通知包
void SendLineStateNotification(uint8_t dts, uint8_t rts, uint8_t cd, uint8_t ri) {
uint8_t notification[10] = {
0xA1, 0x20, // bmRequestType, bNotification
0x00, 0x00, // wValue
0x00, 0x00, // wIndex
0x02, 0x00, // wLength
(cd << 0) | (dts << 1) | (rts << 2) | (ri << 3)
};
USB_Write(EP_INT_IN, notification, 10);
}
主机端驱动捕获该事件后可触发回调函数,实现诸如“载波丢失”中断处理等高级功能。
4.4 开源项目实例分析:CP210x驱动逆向与定制化开发
Silicon Labs 提供了完整的 CP210x SDK ,包含Windows驱动源码、编程工具和DLL库。通过对官方驱动逆向分析,可学习如何实现非标准设备支持或构建轻量级替代方案。
4.4.1 Silicon Labs官方驱动结构拆解
其Windows驱动由以下组件构成:
cp210x.pdb:调试符号文件cp210x.cat:数字签名目录cp210x.inf:安装指令清单cp210x.sys:核心驱动二进制
其中 .inf 文件尤为关键,定义了设备匹配规则:
[CP210x.DeviceList]
%CP210X_FRIENDLY_NAME%=CP210x.Install, USB\VID_10C4&PID_EA60
通过修改PID即可支持新型号。
4.4.2 修改INF文件实现非标准设备支持
假设某设备使用PID= 0x9999 ,原厂驱动无法识别。可复制原始INF,在 [Models] 段添加新条目:
[CP210x.DeviceList]
%CP210X_FRIENDLY_NAME%=CP210x.Install, USB\VID_10C4&PID_9999
然后右键“更新驱动程序”并指向该INF,即可强制绑定。
4.4.3 利用libusb进行裸设备访问尝试
对于无需虚拟COM端口的应用,可直接使用 libusb 实现零驱动通信:
libusb_device_handle *h = libusb_open_device_with_vid_pid(NULL, 0x10c4, 0xea60);
libusb_claim_interface(h, 0);
libusb_control_transfer(h, 0x40, 0x00, 115200, 0, NULL, 0, 1000); // 设置波特率
libusb_bulk_transfer(h, 0x01, data, len, &transferred, 1000); // 发送数据
此法适用于嵌入式网关、协议分析仪等场景,摆脱对操作系统串口子系统的依赖。
5. 跨平台部署与实战应用案例解析
5.1 Windows系统下驱动安装全流程
在Windows操作系统中,USB转串口适配器的正常运行依赖于正确且兼容的驱动程序。由于不同厂商采用的主控芯片(如Prolific PL2303、FTDI FT232、Silicon Labs CP210x)具有各自独立的驱动架构,因此在实际部署过程中需针对具体硬件进行精细化配置。
以 Prolific PL2303 为例,在Windows 10及更高版本系统中常出现“该设备驱动未通过数字签名验证”或自动降级为旧版不可靠驱动的问题。其根本原因在于微软自Win8起加强了驱动签名强制策略(Driver Signature Enforcement),而部分老版本PL2303驱动未更新EV签名。解决方法如下:
# 步骤1:临时禁用驱动签名强制
bcdedit /set testsigning on
shutdown /r /t 0
重启后进入测试签名模式,可手动安装非认证驱动。建议使用Prolific官网发布的最新V1.10.0+版本,支持Windows 11并修复了早期芯片伪造问题(如PL2303HX-D被误识别)。
对于 FTDI 芯片 ,存在两种驱动模式:
- VCP(Virtual COM Port) :模拟标准串口,适用于大多数上位机软件;
- D2XX Direct Driver :提供底层API访问,适合高实时性需求场景(如FPGA烧录)。
推荐选择依据如下表格:
| 应用场景 | 推荐驱动类型 | 开发接口 | 延迟表现 |
|---|---|---|---|
| GPS数据采集 | VCP | Win32 API (CreateFile) | 中等 |
| 高速数据流传输 | D2XX | FT_Read/FT_Write | 极低 |
| 多设备并发控制 | D2XX | 同步I/O + 事件通知 | 高效 |
CP210x Universal Driver 安装相对简单,Silicon Labs提供自动检测工具(CP210x_VCP_Windows.exe)。若设备因VID/PID变更无法识别,可通过修改INF文件实现兼容:
# 在 %SystemRoot%\inf\oem#.inf 中添加
[DefaultInstall]
CopyFiles = DriversCopyList
[DriversCopyList]
cp210x.sys
[SourceDisksFiles]
cp210x.sys=1
# 添加自定义设备ID
%CP210X_DEVICE%=CP210X_INSTALL, USB\VID_XXXX&PID_YYYY
保存后刷新设备管理器并手动指定路径安装即可绕过签名限制(需关闭Secure Boot)。
5.2 Linux系统设备管理机制深度配置
Linux内核通过 usbserial 模块实现对主流USB转串口芯片的支持,但默认设备节点 /dev/ttyUSB* 的编号具有不确定性,不利于自动化脚本调用。为此需借助 udev 规则实现持久化命名。
假设连接一个用于GPS定位的CP2102模块,其硬件信息可通过以下命令获取:
udevadm info -a -n /dev/ttyUSB0 | grep -E "idVendor|idProduct|serial"
输出示例:
ATTRS{idVendor}=="10c4"
ATTRS{idProduct}=="ea60"
ATTRS{serial}=="0001"
据此编写udev规则:
# /etc/udev/rules.d/99-gps-usb.rules
SUBSYSTEM=="tty", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", \
ATTRS{serial}=="0001", SYMLINK+="ttyUSB_gps"
重新加载规则:
sudo udevadm control --reload-rules
sudo udevadm trigger
此后每次插入该设备,都将生成 /dev/ttyUSB_gps 符号链接,确保应用层配置稳定。
权限方面,默认情况下普通用户无权访问串口设备。解决方案有两种:
# 方法一:加入dialout组(推荐)
sudo usermod -aG dialout $USER
# 方法二:修改设备节点权限
sudo chmod 666 /dev/ttyUSB_gps
此外,结合 systemd 可实现开机自动启动串口监听服务。创建服务单元文件:
# /etc/systemd/system/gps-listener.service
[Unit]
Description=GPS Data Listener
After=multi-user.target
[Service]
Type=simple
ExecStart=/usr/bin/python3 /opt/gps_reader.py
Restart=always
User=pi
[Install]
WantedBy=multi-user.target
启用并启动:
sudo systemctl enable gps-listener.service
sudo systemctl start gps-listener.service
5.3 串口通信测试与调试工具实战
有效的调试工具链是保障串口通信稳定的关键环节。以下是三款典型工具的实际操作指南。
PuTTY 常用于捕获GPS模块输出的NMEA语句。配置参数如下表:
| 参数项 | 设置值 |
|---|---|
| Connection type | Serial |
| Serial line | COM3 或 /dev/ttyUSB0 |
| Speed (baud) | 9600 |
| Data bits | 8 |
| Stop bits | 1 |
| Parity | None |
| Flow control | XON/XOFF |
连接成功后,可观测到类似 $GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47 的标准报文。
SecureCRT 支持脚本自动化发送AT指令控制GSM模块。例如,执行网络注册状态查询:
# send_at.vbs
Sub Main
crt.Screen.Send "AT+COPS?" & vbCr
crt.Screen.WaitForString "OK"
crt.Screen.Send "AT+CSQ" & vbCr
crt.Screen.WaitForString "OK"
End Sub
配合定时任务可实现心跳包检测。
minicom 是无图形界面环境下的首选终端工具。启动前需配置:
sudo minicom -s
进入菜单设置串口为 /dev/ttyUSB0 ,波特率115200,保存为default。日常使用仅需:
minicom
支持日志记录、宏命令等功能,适合嵌入式现场调试。
5.4 实际应用场景综合演练
5.4.1 嵌入式开发板Bootloader烧录失败排查
常见现象:串口无响应或打印乱码。诊断流程如下:
graph TD
A[连接串口] --> B{是否有输出?}
B -->|否| C[检查电源与复位]
B -->|是| D[观察波特率是否匹配]
D --> E[尝试115200/57600/38400轮询]
E --> F[确认数据位/停止位一致]
F --> G[更换线缆排除接触不良]
G --> H[成功进入Bootloader]
关键点:某些Allwinner芯片默认使用 115200-8-N-1 ,而STM32可能为 9600-8-E-1 。
5.4.2 工业传感器Modbus RTU协议数据采集链路搭建
使用Python + pymodbus 实现温湿度读取:
from pymodbus.client import ModbusSerialClient
import logging
logging.basicConfig(level=logging.DEBUG)
client = ModbusSerialClient(
method='rtu',
port='/dev/ttyUSB_modbus',
baudrate=9600,
parity='N',
stopbits=1,
bytesize=8
)
if client.connect():
result = client.read_holding_registers(address=0, count=2, slave=1)
if not result.isError():
temp = result.registers[0] / 10.0
humi = result.registers[1] / 10.0
print(f"Temperature: {temp}°C, Humidity: {humi}%")
需注意RS485收发使能时序控制(若使用带DE引脚的转换器)。
5.4.3 多串口扩展卡冲突解决方案与资源占用监控
当系统接入多个USB转串设备时,易发生中断冲突或缓冲区竞争。可通过以下命令监控资源使用:
# 查看各串口统计信息
cat /proc/tty/driver/usbserial
# 监控设备热插拔事件
udevadm monitor --subsystem-match=tty
# 检查USB带宽占用(lsusb -t)
lsusb -t
优化策略包括:降低非关键设备波特率、分散挂载至不同USB控制器、采用带独立HUB的扩展卡。
简介:USB转串口驱动是实现现代计算机通过USB接口与RS232串行设备通信的关键技术,广泛应用于嵌入式调试、工业控制、GPS和GSM模块连接等场景。本文深入解析了USB转串口适配器的工作原理,涵盖固件与驱动程序的协同机制,并详细介绍了在Windows和Linux系统中驱动的安装、配置与使用方法。针对Prolific、FTDI、CP210x等主流芯片方案,提供实用操作步骤,帮助用户解决设备识别、虚拟COM口创建及串口参数设置等问题,确保硬件兼容与稳定通信。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 26
26 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)