
【论文阅读及翻译】1.具有压缩响应瞬态双稳性的软关节超弹性扭矩反转机制
Snap-through是从平衡状态的系统快速过渡到非正面平衡状态,它是软件的宝贵设计元素,可将整体刺激转换为具有冲动运动的系统响应。受益于快照的一种常见方法是在结构和材料(例如可动结构)中体现它。在自然界中发现的扭矩 - 反转机制,通过肌肉力来利用这种扭曲的不稳定性,可能具有比较的优势。但是,需要复杂的运动学/动力学的人工扭转机制的当前复杂性限制了软接头和设备的设计可能性。在这里,我们利用了超弹
[论文阅读及翻译]
A hyperelastic torque-reversal mechanism for soft joints with compression-responsive transient bistability
具有压缩响应瞬态双稳性的软关节超弹性扭矩反转机制
个人阅读,无校对,无商业用途,侵删
个人思考
信息
Woo-Young Choi1,2†, Woongbae Kim3,4†, Jae-Ryeong Choi1, Sung Yol Yu1, Seunguk Moon1, Yong-Jai Park5, Kyu-Jin Cho1*
摘要
Snap-through是从平衡状态的系统快速过渡到非正面平衡状态,它是软件的宝贵设计元素,可将整体刺激转换为具有冲动运动的系统响应。受益于快照的一种常见方法是在结构和材料(例如可动结构)中体现它。在自然界中发现的扭矩 - 反转机制,通过肌肉力来利用这种扭曲的不稳定性,可能具有比较的优势。但是,需要复杂的运动学/动力学的人工扭转机制的当前复杂性限制了软接头和设备的设计可能性。在这里,我们利用了超弹性来在软接头中实现扭矩 - 反转机制,从而通过嵌入式肌腱产生重复的纤毛样的跳动运动。开发的高弹性扭矩 - 逆转机制(HERTRM)在特定的压缩位移/力阈值下表现出瞬态双重性,在瞬态结束时发生snap-through。为了验证该设计原理的有效性,我们通过证明概括性的软机器探索了HETRM在储能和释放中的功能,冲动和连续运动的双模式,机械融合和快速的三维运动。我们预计该设计原理可以洞悉纳普直通行为,并可能有助于理解扭矩 - 反转机制和双态性之间的关系。
结论
尽管双态结构和扭矩 - 反转机制具有通过快速运动来存储和释放能量的能力,但它们可以独特地使用,在可靠的结构中通常使用内部应力,而扭矩反转机制则使用受控的压缩力。扭矩 - 反转机制先前是使用闩锁机制和N型杆连接设计的。在这项工作中,我们介绍了具有超弹性软接头的软机器人的扭矩 - 反转机制,从柔软的纤毛的稳定性转换中汲取了灵感。我们发现图5。Hetrm软抓手具有具体的机械保险丝函数。 (a)抓手精心处理一块果冻(顶部)和一个折纸盒(底部),证明了其能力释放对象而不会造成由控制错误引起的过度致动而造成损害。 (b)HETRM软机械保险丝机制的示意图,说明了从初始状态到抓地力模式的过渡以及在过度张力或位移下激活保险丝的快照行为。 (c)实验结果表明,单个HetrM软机械保险丝传递的力向物体。 图6。HetrM缠结的触手,具有连接的连接和旋转连接。 (a)HetrM缠绕的触手由六个成对排列的HETRM关节组成,每对以22.5°旋转相对于彼此排列。快速行为的设计旨在同时触发,从而产生快速的缠绕运动。 (b)HETRM触手抓手在一个圆柱形物体周围缠绕。握力具有六个HETRM接头,在22.5°旋转下排列了两个近端和四个远端对。管理HETRM的核心原理是,与始终具有两个稳定点的双态结构相反,它在压缩下表现出瞬态双重性,但在某些情况下,在发生快照的某些条件下变得可以单位。我们通过建模和实验及其工程特征,研究了HETRM的压缩响应瞬态双重性,包括存储和释放,用于自触发和主动触发,双模式致动,机械安全机制和3D运动。尽管这项研究介绍了HETRM的概念并广泛探讨了其潜在功能,但仍需要进一步的研究来增强其可伸缩性和适用性。例如,将剪切应力纳入建模过程将提高精度。更广泛的方法,例如有限元方法(FEM),可以为平面外3D运动和多关节系统提供更大的可扩展性。但是,在大型压缩变形和瞬态运动条件下,在FEM模拟中达到融合的挑战仍然存在。此外,为了扩展这种机制的实用性,还需要进一步的研究来探索其在更广泛的尺度上的实施和功能。我们认为,HETRM作为一种能够产生冲动运动或可控双重性的软机器人组件有望,我们也希望我们的方法为使用Snap Trungh-trough Insbionvilisions提供了对软结构设计的新视角。
一、INTRODUCTION 引言
在许多自然和人工系统中,软体作为一种媒介,能够将各种类型的整体刺激——如机械(1,2)、流体(3-7)、电(8-10)、磁(11,12)、热(13,14)和湿度相关(15)刺激——转化为系统、自适应和逼真的反应。然而,与刚性部件相比,软体通常被认为不太适合产生快速而有力的运动。旨在通过驱动方法克服这一问题的研究表明,燃烧驱动(16-18)和电液驱动方法(19,20)取得了有前景的结果。利用Snap-through是从平衡状态到非正值平衡状态的系统快速过渡,是实现冲动运动的另一种广泛采用的方法(21-23)。通常通过材料特性,结构设计或拓扑结构来利用快速型不稳定性,其特征在于非线性载荷 - 置换关系与负刚度的中间区域(21)。例如,超弹性球形膜在体积扩张下软化并加强,使研究人员可以通过液体(24、25)(24、25)或电动机制(24、25)和跳跃机制(27)来利用易不稳定性。另一种常见的方法涉及合规机制。例如,在两端弯曲刺具有弹簧,例如在屈曲和延伸过程中表现出刺激性行为,使软机器人的高速疾驰(28)和重新配置(29)。拓扑设计,例如受约束的弹性梁,弯曲的板和可逆壳,也用于在软或柔性结构中体现瞬间不稳定性(21)。受约束的弹性梁及其简单的结构产生快速的来回运动,已用于陆生和水生推进的软设备中(30,31)。弯曲的板在自然界中通过金星蝇叶叶迅速转化为从凸变为凹的捕获猎物(32),通常被用作快速且节能的软抓地力(33-35)。可逆壳可以轻松地设计成流体驱动的软设备(例如跳跃机器人和阀门)的封闭几何形状(27,36)。这些拓扑设计可以表现出双稳定性或单稳定性,既有瞬间不稳定性,具体取决于其几何参数的调整(21,36-39)。因此,对于双向捕捉运动,用户可以通过拮抗性致动(双稳定性)选择性地选择势能之间的功能,或者通过简单地调整单向启动的水平(单稳定性)来恢复初始形状(图S1)。
跳蚤的跳跃(40,41)和枪dopods的超快速震动(螳螂)(42-44)是使用瞬间不稳定的其他有趣的脉冲运动生物学实例。这些系统通过压缩肌肉来存储能量,然后通过逆转扭矩的方向(一种称为扭转扭转机制的过程)来释放它。图1a显示了跳蚤的跳蚤反转机制的简化机制,图1B说明了关节角度和势能的变化相对于弹簧位移(对应于系统中的弹簧位移(对应于跳蚤的伸肌的收缩))。首先,关节被锁定,春季存储能量[图。 1,a和b,(i)和(ii)]。随后,触发力(对应于跳蚤的触发肌肉)稍微向另一个方向旋转,逆转扭矩的方向,然后将存储的能量迅速转化为旋转运动[图。 1,a和b,(iii)和(iv)]。释放弹簧后,系统返回其初始状态,从而可以重复循环 [ 图1,a和b(v)]。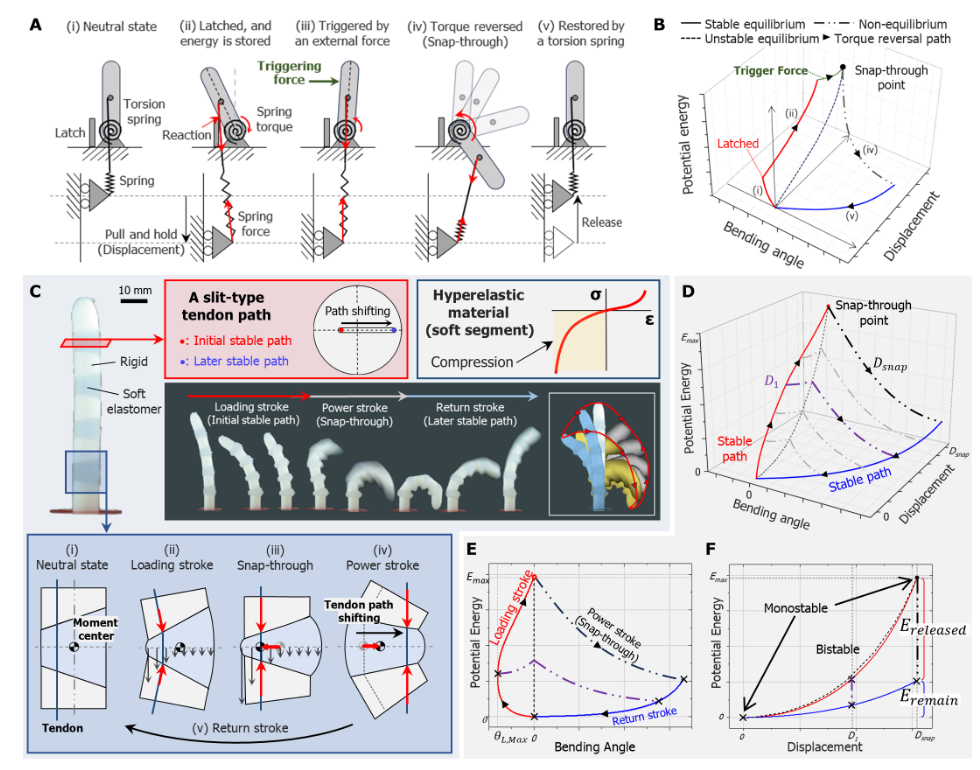
图1。扭矩 - 反转机制和HETRM。 (a)基于连锁的扭矩 - 反转机制,模仿跳蚤的跳跃腿。 (b)相对于弹簧位移,基于连锁的扭矩 - 反转机制的关节角和势能。 (c)HETRM的设计和原理。 Hetrm梁由交替的刚性(Verowhite,Stratasys)和超弹性软(Ecoflex 00-30,Smooth-On,Inc。)组成。 (红色插图)关节的横截面具有狭缝型肌腱路径,该路径允许在初始稳定路径和后来的稳定路径之间横向移动。 (深色插图)在HETRM束中,能量在加载过程中存储,然后在动力冲程期间释放,从而产生类似纤毛的弯曲运动。剩余的能量用于恢复原始位置。 (蓝色插图)示意图显示由于软接头内的内部应力分布,HETRM循环中的扭矩逆转和肌腱运动。 (d)HETRM相对于肌腱位移的关节角和势能。 (e)势能与弯曲角的函数。 (f)势能是位移的函数,说明了HETRM的释放和剩余能量。
如图1B所示,扭矩 - 反转机制的行为是非偏置的,其中最初的能量加载阶段的轨迹和snap-through后的轨迹定义了两个不同的稳定平衡路径。此特征与可伸缩不稳定性决定的双态结构不同,并表明可以实现多种功能。首先,可以通过主动触发来控制在快照过程中释放的能量量,该特征使用更大的收缩力或位移会导致更大的能量。其次,可以通过重复收缩,触发和释放来产生环状能量存储和释放行为。可以设计连接构型为扭矩逆转而设计,以通过单个收缩执行器自触发,如水 - 潮流机器人的跳跃机制(41)和螳螂虾启发的机制(44)所见,除非需要触发执行器,除非需要触发执行器不必要。第三,可以通过在旋转中心的另一侧施加初始压缩力来选择性地使用一般的连续运动(换句话说,跳蚤可以连续移动腿部爬行而不是跳跃)。但是,扭矩 - 反转机制的当前设计规则需要进行机械闩锁和弹簧组件的精致动力学/运动学设计,因此仅导致了基于N-BAR链接结构的少数报道的设计方法,就我们所知。与软接头的最终不兼容无法在有前途的柔软体系系统和软机器人技术领域中使用扭矩交流机制。
本文介绍了一种设计方法,用于一种体现在软接头中的扭矩 - 反转机制,从而通过简单地拉动单个肌腱来实现重复的,类似纤毛的跳动运动。所提出的机制称为超弹性扭矩 - 反转机制(HERTRM),是通过逐渐将能量存储在软接头中,然后自我触发的迅速释放存储能量的快速运动。我们分析了HETRM,发现该系统表现出低于一定临界值的压缩力的双重性。但是,随着压缩力超过这一临界价值,稳定状态之一会消散,导致系统变得可见,并导致瞬间不稳定。这种行为归因于软接头内的自压缩分散,因为它们具有超弹性材料的特性,从而导致局部刚度变化。通过在HETRM上进行建模和实验,我们对快照点进行了预编程,并控制了通过自触发而存储和释放的能量量。此外,我们通过实验验证了使用触发肌腱释放HETRM的主动能量存储和释放功能的概念。我们展示了各种HETRM应用,包括人造的基质节奏,鸡蛋饼干,双模式软抓地力,机械保险丝,迅速扭曲的触手状抓地力和具有空间外运动的爬行者,以展示其在软体系统中的电势。
二、RESULTS 结果
纤毛的跳动动作的灵感
纤毛的跳动运动是自然产生快速和动态运动的一个值得注意的例子(12、45、46)。在静止状态下,纤毛是一个没有结构偏置的柔性光束。然而,在跳动运动期间,动力蛋白的一侧是动人的,而另一侧是不活跃的,从而使弯曲形状在结构上稳定(45)。通过在稳定的弯曲几何形状之间进行双侧切换,纤毛周期性产生功率和恢复中风,产生微流体推力以传达物质或移动宿主细胞的身体。这种行为是将Snapthrough运动纳入软接头的灵感,而无需几何复杂性和固有的结构双重性。
一个自触发的hetrm
为了利用扭矩 - 反转机制为软接头,我们在刚性段之间放置了软超弹性材料段,并嵌入了单个肌腱,如图1C所示。我们设计的片段是处于倾斜形状(侧视图中的梯形形状)和狭缝型肌腱路径,这是刚性和软段的横截面狭窄和空心区域,可实现肌腱的横向运动(图1C中的红色插图图)。我们在图1C(蓝色插图)中示意性地说明了单位HetrM束的单个周期。在中立状态下,嵌入的肌腱位于软段的窄侧[图。 1C(i)]。当我们拉动肌腱时,软接头凝结,梁弯曲[图。 1C(ii)]。由于柔软物质的热弹性,在材料被压缩时刚度迅速增加(图S2),与宽侧相比,狭窄侧的较大应变导致这两个区域之间的刚度差异。随着施加的张力的增加,这种现象改变了内部应力的分布,从而导致结构的力矩中心逐渐向肌腱的位置转移。我们对力瞬间(即扭矩)的计算结果表明,增加张力的效果最初超过了力矩臂缩短的效果。但是,这种关系在以后的阶段反转(图S3和补充方法)。因此,在此载荷冲程阶段,弯曲角达到了局部峰,然后降低到0°。当将肌腱拉到临界位移或张力时,扭矩最终逆转[图。 1C(iii)]。由于肌腱迅速滑到裂隙型肌腱路径的另一端时,这种扭矩逆转(即插入)导致Hetrm束在相反的弯曲方向上产生快速而动态的功率中风[图。 1C(iv)]。最后,当我们释放肌腱时,系统返回其初始状态[图。 1C(v)]。自触发的hetrm的周期性运动类似于纤毛跳动运动的功率冲程和返回冲程,如图1C中的四孔段Hetrm梁所证明的那样(黑色插图),图。 S4和电影S1。
HETRM的压缩响应性瞬态双重性
当通过拉肌腱略微弯曲时,Hetrm梁表现出双重性。如果应用外力推动尖端,它可以在相反方向上过渡到稳定的配置。但是,当将肌腱拉出临界位移(引起自触发的刺激)时,Hetrm束在其弯曲构型中变得可以单位(如电影S2中所示)。为了研究这种压缩响应性的瞬态双重性,我们在图1d(i)中可视化了建模结果,显示了肌腱位移(d),势能(E)和梁(θ)的弯曲角之间的关系(请参见表S1中的详细信息)。图1d(i)中的红线指示肌腱从其初始位置拉出,产生负载冲程时,基于模型的计算结果。蓝线表示当触发扭矩逆转后,即肌腱在肌腱缝的另一端与其初始位置相比,当肌腱逆转后释放时,蓝线表示结果结果。黑色虚线代表了假设情况的计算结果,其中Hetrm梁未弯曲,表明相应的肌腱位移的平衡点不稳定。图1E显示,Hetrm梁对于临界位移DSNAP是可双向的。例如,D1由图1中的紫色仪表板表示,有两个稳定的点:一个在红线上,另一个在蓝线上。如果施加外力以将HETRM光束变形为黑线上的相应不稳定平衡点,则HETRM系统可以通过快速直通在这两个稳定点之间进行切换。在这一点上,取决于迅速的方向,不稳定平衡点与相应稳定点之间的能量差代表了存储或释放的能量差。
对于红线上的点(加载中风),系统表现出弯曲角的负峰值。此后,恢复了弯曲角,并且系统在DSNAP处相交的黑色虚线。由于相交点是一个不稳定的平衡点,因此红线上的稳定性从https://www.science.org下载,于2025年2月18日在纽卡斯尔 - 泰恩大学(Newcastle-upon-tyne)的https://www.science.org下载,于2025年2月18日从相互作用(≥DSNAP)(≥DSNAP)以及Hetrm System System System System the Hetrm System the Hetrm System the Hetrm System从BISTABLE中转换为Morostable to Morostable。这种压缩响应性瞬态双重性解释了HETRM的自发触发插曲行为,这是从消失的稳定点到剩余稳定点的系统过渡。拉动肌腱时,Hetrm束沿初始稳定路径变形,并将能量存储在软接头(红线)中。然后,当系统到达双态性结束的临界点时,它迅速过渡到蓝线上的剩余状态,并释放出等于两个点之间能量差的能量(图1F中释放出来)。最后,当肌腱释放时,HETRM系统使用剩余的能量(Eremain,图1F)作为恢复力,并沿蓝线返回到原点。压缩响应性瞬态双态性提供了多种功能。首先,我们可以通过反复控制从0到DSNAP并返回0的位移来实现重复且连续的纤毛样冲动运动。当将此肌腱从HETRM梁的中性状态拉出时,梁反复弯曲,沿一个方向弯曲,沿着稳定路径对应于蓝线(在以下“双模式HETRM软握把”部分中作为正常模式实现)。第三,我们可以使用其他执行器来积极控制释放的能量量(在“ HETRM的主动触发”部分中详细介绍)。第四,我们可以机械地限制HETRM梁以仅在临界点以下的输入级别(详细介绍“安全相互作用的HETRM软机械保险丝”部分)以执行预期函数。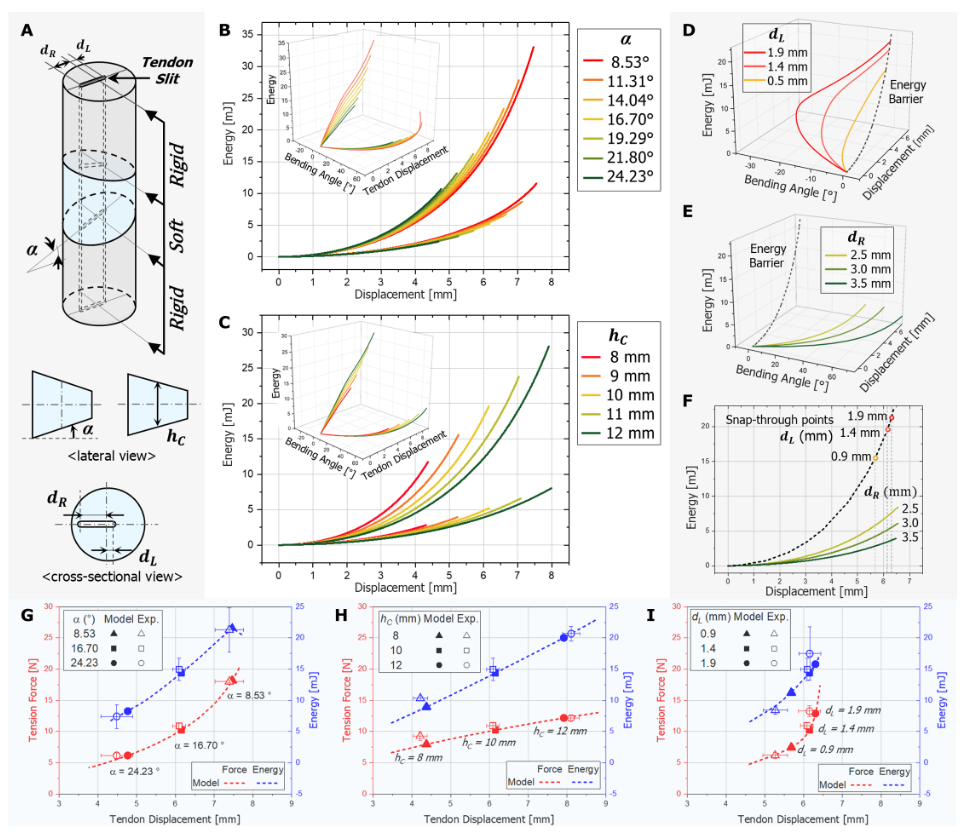
图2。通过建模和实验对HETRM的表征。 (a)HETRM的示意图表示关键设计参数。对(b)软接头倾斜角(α)和(c)关节中心高度(HC)的设计参数进行建模结果。 (d)狭缝型肌腱路径参数,DL和(e)DR的建模结果。 (f)不同DL的快速点和具有不同DR值的返回路径。 (g)比较设计参数α,(h)HC和(i)dl的建模和实验结果。模型预测的趋势用虚线表示。比较了实验和特定设计变量模型之间的肌腱位移,张力和释放的能量。
HETRM的参数研究
为了更好地了解HETRM,我们通过建模和实验研究了软接头的设计参数。设计参数包括关节倾斜角(α),关节中心高度(HC),在载荷中心(DL)期间从中心到肌腱位置的距离以及在返回冲程期间从中心到肌腱位置的距离(DR),如图2A所示。每个参数的基于模型的计算结果如图2(B至F)所示。来自模型的详细数值和不同参数的实验结果如图2(g至i)和表S2至S4所示。如图2B所示,增加α导致HETRM在加载过程中为相同的肌腱位移存储更多的势能。相反,在返回中风期间,HETRM在相同的肌腱位移中存储较少的能量。因此,随着α的增加,释放能量相对于存储能量的效率(ηouout= eREALEDEARED ∕估计)增加。然而,增加α导致该快速发生在较低的触发位移(DTRIGGER)和张力力(FTRIGGER)处,从而导致估计和释放的减少。这表明α充当压缩过程中内部应力分布失真的放大器,使HETRM更有效,更易于触发,如图2G和表S2中的实验和建模所示。如图2C所示,HC的增加导致在载荷和返回笔触中相同D的能量较少,这与α的不同,其中两个笔触的趋势相反。此外,随着HC的增加,在较大的D下触发了快照,并释放了更多的能量,但效率略有下降。图2H和表S3中的实验和计算结果表明,触发的输入值和能量值随着HC的增加而逐渐增加。总体而言,HC的增加类似于增加HETRM的能力。 DL的图2D显示了肌腱缝的不同设计参数的基于模型的计算结果。随着DL的增加,较大的D发生了快照,因此,如图2i和表S4中的实验和计算结果所支持,所有能量值也会增加。同时,增加DR减少了回归中风(Ereturn)中的剩余能量,两者都发生了很大的变化。图2F显示了在黑色虚线上不同DL的快照点和不同DR的稳定路径,证明DL和DR分别确定了HETRM给定几何形状的能量量分别存储和释放的能量量。图2(g至i)显示了在自触发点的位移,张力和释放能量的基于模型的计算和实验值。对于dtrigger和删除,九个参数中有八个的实验结果落在95%置信区间的目标设计误差范围内。例外是DL = 0.9 mm,与DL = 0.8 mm的建模结果匹配;我们怀疑制造公差和肌腱厚度会导致这种差异。对于触发张力(FTRIGGER),九个参数中的四个与误差范围内的模型预测相匹配,鉴于诸如剪切力和摩擦等未缩写因子,这是合理的。另一方面,与计算值相比,实验数据中的估计和ERETURN更高,导致实际能效率比模型计算的大约15至20%(表S2至S4)。我们怀疑这种差异是因为实验能值是从张力置换回路计算得出的,在我们简化的模型中,剪切力和摩擦不考虑的因素引起差异,尤其是在弯曲角度较大的区域中。这是图2的支持。 S5表明模型和实验之间的张力差异随着肌腱的拉动而增加,然后减小,这表明剪切力和摩擦在较小的弯曲角度下的影响降低。我们还推断,该模型与eREAREAD的实验结果的合理一致,该模型是由估计和Ereturn之间的差异计算的,这是由于未经考虑的因素的反作用,尽管这需要进一步研究。
基于HETRM的基质节奏和冲动驱动
基质节奏是在纵向行中结构的纤毛的代表性行为,由它们的顺序作用产生,在相邻邻居之间具有一定的相位差异(46)。通过流动波的产生,这种基因节奏可以使流体和颗粒的运输或生活系统的运动(12)。我们使用建模结果(随着HC的增加,DSNAP成比例地增加;图S6)来人为地模仿基质节奏,如图3A和Movie S3所示。连续将五个仅在HC值中不同的HETR结构在其HC值中差异1 mm(左侧HC = 9 mm,右侧HC = 13 mm,DSNAP预计将按比例增加一个间隔为0.895 mm)。肌腱通过鲍登电缆连接,连接到单个皮带轮,以确保电动机驱动时相同的肌腱位移。结果,通过驱动单个电动机,从左到右依次触发HETRM梁,从左到右触发。自触发的Hetrm束从执行器逐渐存储,然后冲动地释放出来,而典型的软弯曲接头将需要直接从执行器中直接冲动的脉冲能量转移等效功能。为了展示此功能,我们通过单个关节HETRM梁进行了蛋壳裂缝挑战,该梁可以选择性地操作HETRM模式(能源存储和释放摇摆运动)和正常模式(连续弯曲运动)。这些模式是通过在肌腱缝的两端放置两个肌腱并有选择地拉动每个肌腱来实现的(图3B和电影S4)。当通过电动机系统以4 mm/s的速度拉动HETRM模式的肌腱时,在触发Hetrm时,梁击中了鸡蛋,在第一次罢工时发出“咔嗒声”声音并形成椭圆形裂缝。相反,在正常模式下具有相同的肌腱位移对照,梁的尖端沿着鸡蛋的表面滑动,然后随着结构塌陷而旋转,未能传输足够的力以破裂卵的表面。 HETRM模式的肌腱位移和张力的实验结果如图3C所示。在储存的能量为67.05 MJ时,发生了快照,并释放了42.86 MJ,尤其大于破裂蛋壳所需的13至26-mJ范围(47)。蛋壳裂缝挑战表明,通过简单的肌腱位移控制,Hetrm梁可以暂时实现与强大的执行器相同的功能。例如,通过正常模式复制HETRM模式的影响将需要一个在0.03 s内提供42.86 MJ的力控制的执行器轮廓,并从静止中释放瞬时能量。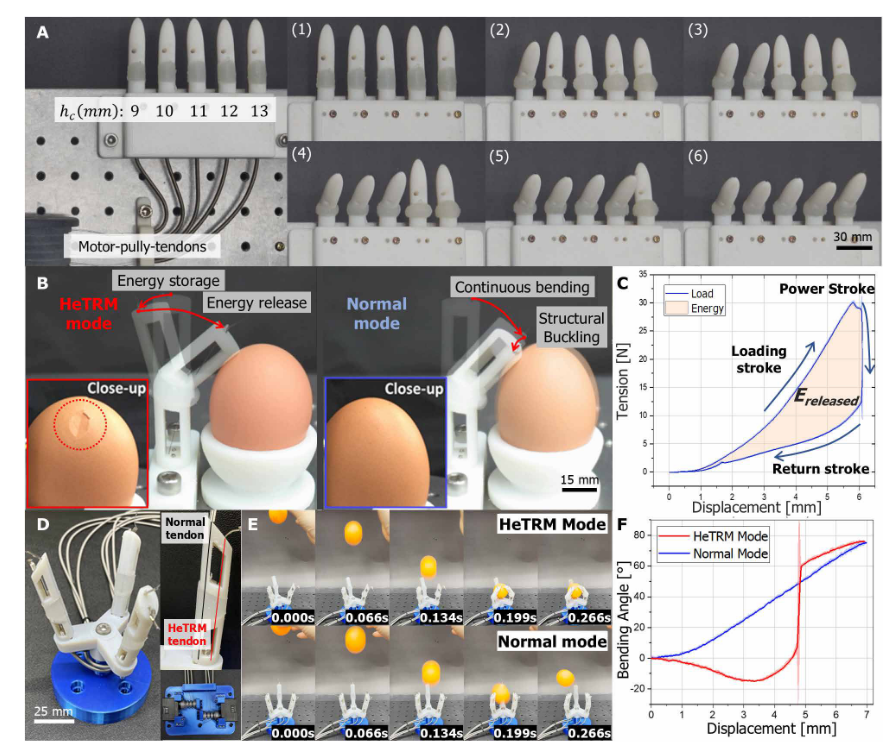
图3。基于HETRM的应用,显示了预编程性,冲动能量释放和快速运动能力。 (a)由一个由单个电动机驱动的五个预编程的HETRM梁产生的人造基质节律,该节奏与HC值增加(9至13 mm)。图像(1)至(6)显示了从左到右的插曲驱动的进展。 (b)通过蛋壳裂缝挑战之间的HETRM模式(左)和正常模式(右)进行比较。 HETRM模式通过冲动能量释放有效地破裂了蛋壳,而正常模式则导致结构屈曲,而没有足够的能量破裂壳。 (c)在没有外部接触的情况下,Hetrm蛋壳饼干的位移图形。阴影闭合区域对应于蛋壳饼干释放的最大能量。 (d)双模式软抓手。该设置包括HETRM和正常模式的两个腱。 (e)使用HETRM模式(顶行)和正常模式(底行)捕获掉落对象(ping Pong Ball)在捕获掉落物体(ping Pong Ball)方面的性能。 HETRM模式由于冲动致动而获得了更快的响应,成功掌握了对象。 (f)抓地力的弯曲角的实验结果是HETRM模式和正常模式的肌腱位移的函数。
双模式HETRM软抓手
许多机器人设备,例如握手,外骨骼和假肢手,都结合了肌腱驱动系统和柔性关节等元素(48-50)。这种设计策略利用了肌腱的不足,关节的高度自由度,从驱动和电子组件的布置中对设备主体的轻巧设计来利用优势,例如适应性,并利用了优势。这些设备与输出力的权衡关系的驱动速度取决于拉动肌腱的速率。从本质上讲,它是由电动机变速箱的配置和皮带轮螺旋系统的路由决定的。因此,传统设备通过主动或被动地调节肌腱驱动的系统应用自适应高速模式或高强度模式。 图3。基于HETRM的应用,显示了预编程性,冲动能量释放和快速运动能力。 (a)由一个由单个电动机驱动的五个预编程的HETRM梁产生的人造基质节律,该节奏与HC值增加(9至13 mm)。图像(1)至(6)显示了从左到右的插曲驱动的进展。 (b)通过蛋壳裂缝挑战之间的HETRM模式(左)和正常模式(右)进行比较。 HETRM模式通过冲动能量释放有效地破裂了蛋壳,而正常模式则导致结构屈曲,而没有足够的能量破裂壳。 (c)在没有外部接触的情况下,Hetrm蛋壳饼干的位移图形。阴影闭合区域对应于蛋壳饼干释放的最大能量。 (d)双模式软抓手。该设置包括HETRM和正常模式的两个腱。 (e)使用HETRM模式(顶行)和正常模式(底行)捕获掉落对象(ping Pong Ball)在捕获掉落物体(ping Pong Ball)方面的性能。 HETRM模式由于冲动致动而获得了更快的响应,成功掌握了对象。 (f)抓地力的弯曲角的实验结果是HETRM模式和正常模式的肌腱位移的函数。为了展示HETRM在提供附加的设计选项中表现出肌腱软机器人体中高速挥杆的能力,同时还允许连续弯曲,我们开发了一个带有三个基于Hetrm的手指的双模式软握把(图3,D和E)。与卵裂挑战中使用的HETRM光束相似,发达的抓手的手指可以执行正常模式,具有连续的弯曲或具有高速挥杆的HetrM模式,通过选择性地拉到位于非HETRM和HETRM路径的每个腱中的两个肌腱(即,两个腱位于Slittype tentype tenty pentoton tentoton的相对端)。图3F中描绘的两种模式的行为的实验结果表明,在正常模式下,手指的弯曲角度响应于肌腱的平均速率为3.8°/mm,最高为1.3毫米,在1.3 mm的平均速率上,它以12.0°/mm的速率几乎线性地增加。因此,当肌腱以5 mm/s的速度拉动时,如电影S5所示,正常模式以60.0°/s的最大速度弯曲。相比之下,HETRM模式最初是非线性沿相反方向弯曲的,然后以0.066 s的速度为56.1°(即850°/s)的瞬时摆动,比正常模式快14倍以上。捕捉插曲之后,由于肌腱的运动学,HETRM模式下的弯曲角度比正常模式高约15°,这导致HETRM模式在相同的位移下实现更大的角度(图S7)。但是,作为这种快速弯曲的权衡,HETRM模式需要通过拉动4.69毫米的临界距离来进行优先能量,当以5 mm/s的速度拉动时花费了0.938 s。这个短暂的准备时间表明,HETRM模式可能不太适合突然出乎意料的情况。但是,我们认为,在预期快速运动并且可以策略性地使用快速运动的情况下,这是有利的。从尖端水平水平地位于16 mm的物体(负载电池)的手指尖端力的实验结果显示在接触后两种模式的相同张力下都相同(图S8A)。在手指上触发扣紧的张力为9.5 n,与物体接触后,张力下降到4.9N。撞击引起的最大尖端力为5.81 n(在特定样品中观察到,很难通过100-Hz负载单元均匀捕获,然后通过稳定到0.40 n的能力,可以快速启用狗的能力,使其能够快速地掌握,使其能够快速地掌握,使其能够快速地掌握,并且能够依靠per gr,并可以将其固定在范围内,使其能够快速地掌握。如图3E和电影S5所示,下降了2.7克乒乓球。 HETRM功率冲程的高速和张力由释放的能量确定,该能量由结构参数支配,而负载速度仍然由电动机螺旋系统设计确定。这种特征绕过传统的权衡关系,还使抓手能够以缓慢但足够强的电动机(电影S5)或容纳200克质量稳定并迅速捕获跌落的70克橘子(图S8B)。相反,正常的弯曲模式虽然更适合典型的抓握场景,但在抓住跌落的乒乓球或下降的橘子方面没有成功。但是,这种正常的弯曲模式可以选择性地用于固定物体的能效和方便的抓握。
HETRM的主动触发
观察自然界中促进能量释放的扭矩 - 反转机制(图1A)表明,要在HETRMS中启用此功能,将需要一个额外的触发执行器才能沿Hetrm肌腱产生的扭矩相反方向施加扭矩。实用的设计选择是将双模式HETRM的正常模式肌腱用作触发肌腱。当从中性状态拉出时,该肌腱激活了正常模式,但是当HetrM肌腱已经接合时拉动时,它不受干物,将HETRM肌腱转移到了矩中心,从而触发了快照行为。为了详细探索双模式Hetrm手指的活动能量释放功能,我们进行了实验,将HetrM肌腱拉到各种位移,然后固定,然后将触发肌腱(即正常肌腱)拉动,直到触发Snapthrough行为。之后,触发肌腱和HETRM肌腱被顺序放松。图4A中HETRM肌腱的位移特性结果表明,标记为“ A”到“ H”的活动触发路径遵循相应位移的自触发路径(标记为“ I,黑线标记为“ I,黑线”)的负载和返回笔触。触发肌腱的相应位移定位结果如图4b所示。如图4C中的紫色条所示,触发能量从标签“ A”逐渐增加到“ D”(HetrM肌腱位移间隔为0.56 mm),然后从标签“ E”急剧下降到“ H”(HetrM肌腱位移间隔为0.14 mm),并且不再需要进行自我触发。图4C显示了总存储,释放和触发能量的结果(表S5中提供了详细的数值值),表明活动能释放可能发生在低于自触发能量释放的范围内。尽管小能量释放的效率较低,但它与自触发释放的最大效率相当(标签“ E”)。我们预计,HETRM的主动触发机制可能可能用于受控的运动或精确且快速的双模式抓手手指,并进一步研究探讨了双模式HETRM的全部潜力。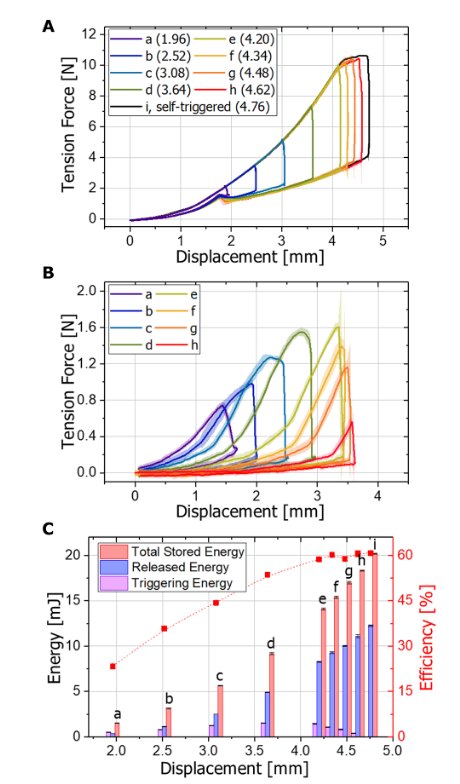
图4。张力的实验分析;流离失所;并存储,释放和触发能量,以进行双模式HETRM的主动触发。 (a)在主动触发路径(标记为a)和HETRM肌腱的自触发路径(标记为i)和(b)触发肌腱的自触发路径(标记为i)的力量。每个标签旁边的括号中的数字表示HETRM肌腱的位移(MM)。 (c)总存储的能量,释放能量,触发能量和活动触发的效率。表S5中提供了特定的数值。
HETRM软机械融合以进行安全相互作用
尽管我们的研究主要探讨了HETRM的冲动行为,但值得注意的是,它的瞬态双重性也可以用于功能目的。如图5A所示,我们开发了一个两指“安全”软抓手,该夹具通过由HETRM肌腱诱导的初始弯曲(即,加载中风)抓住对象;该设计的特征是手指的弯曲方向与双模式HetrM软抓手相反。另外,调整了手指的设计参数,以增加载荷冲程期间的快照位移和峰值弯曲角(小α和大DL,表S6)。因此,加载过程中的弯曲是针对抓住物体的,而瞬间行为迅速弯腰从物体上弯曲。这确保了与外部物体的相互作用仅在临时双重性结束的临界点以下的驱动水平上发生,从而在过度驱动水平下机械停止了物理相互作用(图5B)。因此,就像在过载条件下过电流或剪切引脚下的电熔丝一样,HETRM软机械保险丝通过防止发动意外的过量输入来物理确保安全。图5C说明了通过肌腱位移的函数,由单个HetrM软机械保险丝传递的力的实验结果将其传递到位于各种水平距离(0、2、4或6 mm)的物体。当拉动肌腱时,尖端力最初增加,达到峰值,然后降低到零(比较,图S8显示双模式Hetrm软握把的尖端力随着输入的增加而继续增加)。如电影S6和图5A所示,由于强力传输的上限,安全的软抓手弯曲的手指沿相反的方向弯曲,但由于控制误差而导致过度输入,从而释放了物体,而不是造成损坏。因此,它能够处理精致的物体,例如果冻,折纸盒,番茄和奶酪,而不会造成伤害。结果进一步暗示,HETRM软机械保险丝可能可能在需要安全的人类机器人相互作用的情况下应用,在这种情况下,防止意外伤害至关重要。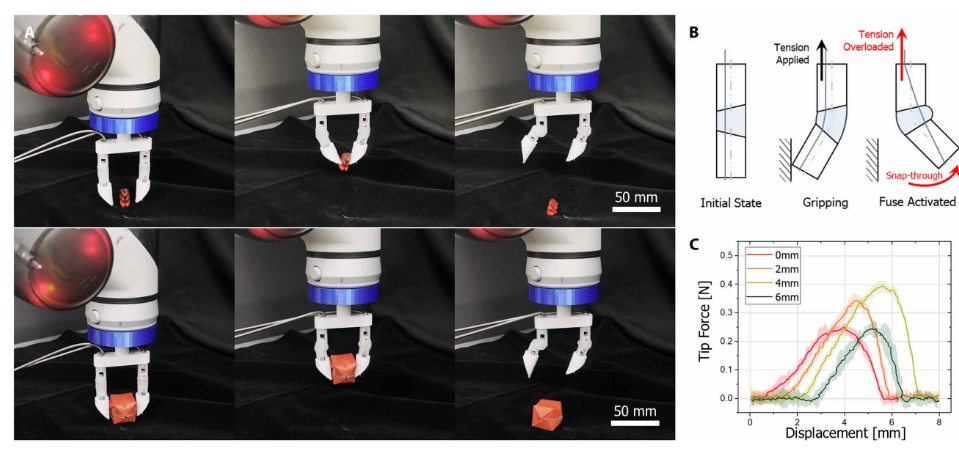
图5。具有体现的机械保险丝功能的HetrM软抓手。 (a)抓手精心处理一块果冻(顶部)和一个折纸盒(底部),证明了其能力释放对象而不会造成由控制错误引起的过度致动而造成损害。 (b)HETRM软机械保险丝机制的示意图,说明了从初始状态到抓地力模式的过渡以及在过度张力或位移下激活保险丝的快照行为。 (c)实验结果表明,单个HetrM软机械保险丝传递的力向物体。
HETRM具有三维平面外运动
在天然系统中观察到的软连续体结构的螺旋结构,例如大象躯干和蛇形,在软机器人设计中有效地复制了,表明了实质性的前景(54-56)。同样,HETRM允许将多个关节串联连接,该连接由单个肌腱驱动,不仅可以使大型的面内运动(图1C和图S4),还可以通过交错配置进行三维(3D)平面外运动。我们建立了一个由六个成对排列的Hetrm关节组成的HetrM缠绕触手,相对于下一个,每对旋转22.5°,如图6a和Movie S7所示。拉动肌腱时,将每个接头加载,然后进行同步的快照运动,将Hetrm触手迅速缠绕成0.54 s的螺旋形状。此外,我们开发了一个Hetrm触手抓手,如图6B和Movie S7所示,其中具有六个Hetrm关节,两个近端和四个远端关节相对于彼此的旋转22.5°。设计的近端接头(DL = 2.0 mm)被设计为在远端接头(DL = 2.5 mm)之前进行快速直接,以确保Hetrm Tentacle Gripper顺序接近圆柱形对象(纸卷),然后周围缠绕围绕它,以牢固地握住它。我们还使用单个关节研究了3D运动的产生。如图7A所示,狭缝型肌腱路径位于圆形横截面的中心位置。我们的设计旨在将力矩中心放置在肌腱缝外面,从而导致瞬间中心的运动方向与肌腱缝路径偏离。这也确保了肌腱路径两端的弯曲形状在施加张力时将存在于不同平面。在此配置中,扭矩逆转仍然发生:当拉动肌腱时,矩中心移动并最终越过垂直于缝隙末端的虚拟线。该动作产生了将肌腱拉到另一侧的横向力。当这种横向力超过静态摩擦力(与作用在壁上的正常力成比例)时,会发生刺激性,导致肌腱沿缝隙滑动(图7a,“ hetrm出现”时的自由图)。因此,这种设计仅通过拉出和释放肌腱即可,即使有一个HETRM接头,也可以通过拉出和释放肌腱来产生3D平面外运动。图7B显示了单个联合HETRM末端的3D空间运动的一个示例,图7C中绘制了X,Y和Z位置,图7C和弯曲角(θ)以及图7d中绘制的方向角(θ)和方向角(φ)。从上方观察时,末端尖端遵循类似于弓形或D形状的轨迹。 HETRM从弓箭的弧线的一端(载荷)追踪了一条弯曲的路径,直到到达弧线中心的中心的一个点,在该弧中发生了弯曲,并将末端尖端迅速摆动到另一侧。在返回中风期间,末端尖端遵循类似于弓弦的轨迹,返回原点。这种3D空间运动,结合了能源和释放功能,在两足的爬行者中应用,旨在通过影响地面以推动自身向前移动(图7E和电影S8)。腿部设计用于模仿海龟的四肢,在装载过程中按在地面上,然后向后摆动以在动力中风期间向前推动身体。返回冲程的3D运动设计,腿在返回初始位置之前从地面上抬起,旨在减轻施加外部力(例如从地面上摩擦)返回初始形状的难度。发挥高力的能力使爬虫不仅可以在图4上向前移动。流离失所;并存储,释放和触发能量,以进行双模式HETRM的主动触发。 (a)在主动触发路径(标记为a)和HETRM肌腱的自触发路径(标记为i)和(b)触发肌腱的自触发路径(标记为i)的力量。每个标签旁边的括号中的数字表示HETRM肌腱的位移(MM)。 (c)总存储的能量,释放能量,触发能量和活动触发的效率。表S5中提供了特定的数值。表面也表面上,也表面不均匀,湿沙,地面反作用力低(图7F和电影S8)。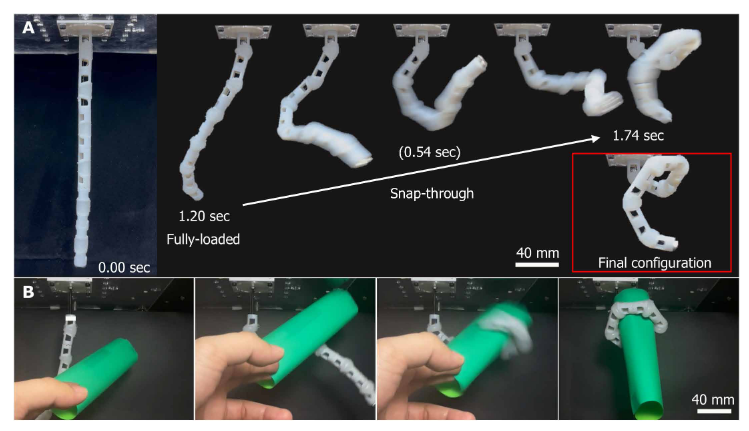
图6。HetrM缠结的触手,具有连接的连接和旋转连接。 (a)HetrM缠绕的触手由六个成对排列的HETRM关节组成,每对以22.5°旋转相对于彼此排列。快速行为的设计旨在同时触发,从而产生快速的缠绕运动。 (b)HETRM触手抓手在一个圆柱形物体周围缠绕。握力具有六个HETRM接头,在22.5°旋转下排列了两个近端和四个远端对。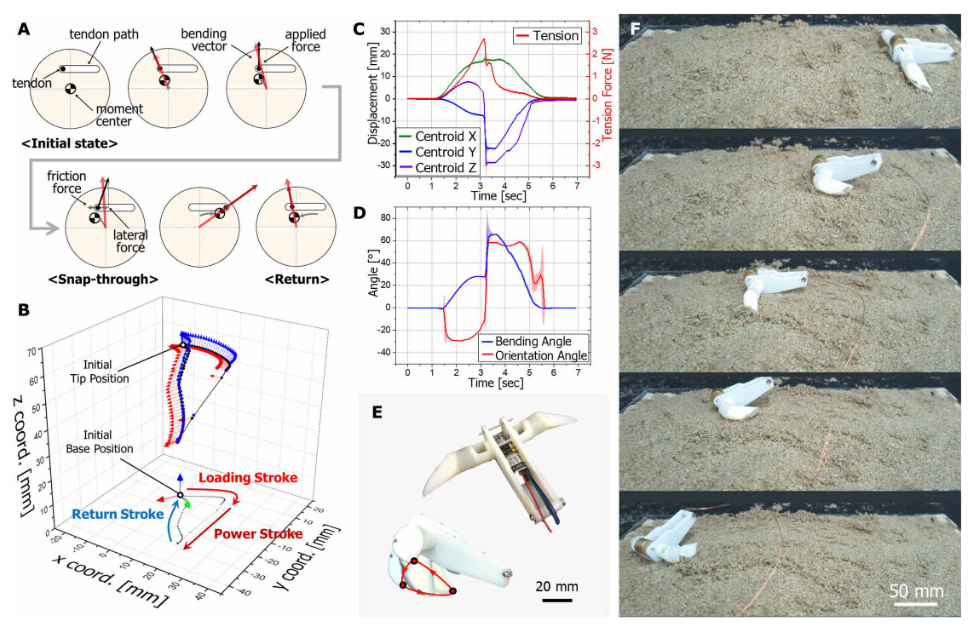
图7。平面外空间运动的HETRM。 (a)3D HETRM的示意图,显示了偏心狭缝肌腱路径。 HETRM关节中力的变化方向产生了平面外3D运动。 (b)具有平面外空间运动的单关节HETRM梁的运动捕获结果。 (c)在运动周期中,X,Y和Z坐标中的末端尖端在X,Y和Z坐标中的位移。 (d)绘制的3D HETRM的弯曲角(θ)和方向角(φ)在时间上绘制。 (e)带有两个3D Hetrm腿的两足软轨道。 (f)爬行者在湿砂上移动,证明其能够穿越不均匀的地形。
材料和方法
HETRM的制造了涉及3D打印和硅胶成型的制造过程,如图2所示。 S9。使用高分辨率3D打印机(Connex 260,Stratasys)打印刚性片段和模具(Verowhite,Stratasys)。模具由顶部和底部的两个部分组成。将刚性段固定在底部模具内的预定距离上,以定义软段的长度。为了创建狭缝型肌腱路径,在刚性段之间插入了一个狭缝模具。这些狭缝模具是通过激光切割的丙烯酸片制造的。固定后,首先将硅胶(Ecoflex 00-30,Smooth-On,Inc。)倒入底部模具中。顶模的孔与软段的空腔相对应。然后将顶模放在底部模具上,然后再次将硅酮倒入这些孔中。在65°C的烤箱中固化超过3小时后,将模具和板移除。为了确保刚性片段和软接头之间的牢固键合,将硅胶粘合剂(Sil-Poxy,Smooth-On,Inc。)应用于关节边缘。无扭结图7。平面空间运动的HETRM。 (a)3D HETRM的示意图,显示了偏心狭缝肌腱路径。 HETRM关节中力的变化方向产生了平面外3D运动。 (b)具有平面外空间运动的单关节HETRM梁的运动捕获结果。 (c)在运动周期中,X,Y和Z坐标中的末端尖端在X,Y和Z坐标中的位移。 (d)绘制的3D HETRM的弯曲角(θ)和方向角(φ)在时间上绘制。 (e)带有两个3D Hetrm腿的两足软轨道。 (f)爬行者在湿砂上移动,证明其能够穿越不均匀的地形。 Choi等人,科学。机器人。 10,EADO7696(2025)2025年1月29日科学机器人|研究第11条的第11条钛金属丝(Beadalon)被用作肌腱,以固定和张紧肌腱张紧。将特氟龙油脂用于减少肌腱和弹性体之间的摩擦。在实验中,将3D打印的标记(Prusament PLA,Prusa或Tangoblack,Stratasys)刻有或沿刚性段的纵向方向刻有或连接,以进行图像跟踪。 用于表征HETRM的实验设置,用于面内运动,平面外运动和图像分析的实验设置如图2所示。 S10。将每个样品垂直安装在设置上,关节定位以确保肌腱沿指定路径穿过缝隙并连接到电动机(Dynamixel XC430-T240BB-T,Robotis)。 3DPRINT的关节安装座和负载电池安装座设计以允许对其位置进行精细调整。这促进了从关节中心的肌腱路径的所需预定义偏移以及关节和负载电池之间的距离的设置。固定后,将肌腱以恒定的速度将电动机拉出。为了测量肌腱力,使用带负载电池(BCL负载,CAS)的三茎张力测量系统来测量张力,其中肌腱以120°的角度向下压在载荷电池上方的皮带轮上。负载电池上产生的力可以计算为两倍的肌腱力乘以60°的余弦,从而简化了等于肌腱力的力。 软材料的热弹性表征,以确定Ecoflex 00-30用于软接头的热弹性特征,进行了压缩测试(图S2)。这是因为HETRM是由压缩载荷驱动的,需要在负应变条件下进行建模的材料数据。圆柱形标本(直径10毫米,高度为10毫米)被制造以与接头的尺度相匹配。标本的顶部和底部表面被固定在拉伸测试机的底部,以确保零位置条件。使用RB 302 ML通用测试机(R&B Co. LTD)以1 mm/s的速度进行压缩测试。使用YEOH模型分析并拟合了实验数据(57)。 HETRM图像分析的2D弯曲的图像分析用于评估关节的屈曲。为了进行图像分析,沿刚性段的纵向方向刻有3D打印标记(Prusament PLA,Prusa或Tangoblack,Stratasys),要么沿着刚性段的纵向方向进行图像跟踪。以每秒30帧捕获的相机(流车,Logitech)垂直于关节记录关节运动。检测到关节侧面上印记的标记,并使用Matlab和Python中的图像处理文库计算其中心。根据两个刚性段之间的相对角度差计算屈曲角,每个片段的角度使用片段上两个标记的固定位置确定。在单个运动周期内进行了循环载荷并释放时进行了该分析。 对HETRM的平面空间空间运动3D运动跟踪分析进行了3D运动跟踪分析,以使用总共六个标记来检查关节的3D运动,每个标记在基础和远端末端各个标记。在关节的每一侧,以三角形构型排列了三个标记以定义平面。使用五个Optitrack设备(Primex 13W,Optitrack)进行运动跟踪,通过重复载荷和肌腱的释放来捕获关节的循环行为。基于基底平面和远端平面之间的位移和角度分析了关节运动。 示范的设计考虑因素证明了HETRM人造基质节奏,定期平行于五个Hetrm接头排列,肌腱穿过Bowden电缆并由单个皮带轮进行连接以进行关节致动。尽管随着设计参数α和DL非线性变化,但它与HC线性变化。因此,可以通过简单地设计具有狭窄且恒定间隔的HC值来实现连续触发(图S6和表S6)。对于蛋壳饼干,应使用低α和高HC,DL和DR值设计接头,以最大程度地释放固定半径。我们通过调整缝隙路径设计参数来增加能源释放的能力,并有意设计具有高DL和DR值的接头,以从关节中释放大量能量(表S6)。将鸡蛋放在卵形的支撑板上,距离关节37.5毫米。对于双模式HETRM抓手,建议减少快速流离失所以迅速为动力冲程充电。这可以通过增加α或减少DL来实现。但是,由于DL对较小值的制造错误过度敏感(图2i),因此我们确定增加α是一种更好的方法(表S6)。三个手指(总长60毫米)间隔21.32毫米,距离基地的中心相距21.32 mm。为了促进抓地力,与握把轴相对于抓地力轴以12.5°的角度附着。驱动这三个接头的肌腱是根据操作模式分别控制的,无论是HETRM模式还是正常模式。在此实验中,使用两个电动机来驱动每种模式。但是,也可以使用离合器机构设计系统,从而通过单个电动机控制两个动作(58)。机械保险丝夹具旨在增加插头位移,以扩大有效的抓地力区域并在抓地力区域实现更逐渐的弯曲刚度。因此,我们用小α和大的DL参数故意设计它(表S6)。接缝以50毫米的间距安装在底座上。对于缠绕的触手,将连接的关节串联为3D打印,但刚性段的设计刻在22.5°的锯齿角上,用于组装。肌腱在关节之间的刚性段内进行了重新对齐,以确保初始位置在每个缝隙的末端。通过DL设计值(2.0和2.5 mm,表S6)的差异,实现了顺序触发的临界位移的分化。对于带有3D运动的爬虫,关节端被设计为宽(大DL和DR,表S6),以便在加载过程中接触地面后,动力冲程可以推向地面。将两个臂连接到基本组件上,并安装了一个带有10毫米直径皮带轮的6-V齿轮电动机,以同时拉动双臂。 主文本中的长盒形HetrM关节,我们专注于讨论圆柱形(圆柱状)Hetrm关节。但是,HETRM的核心原则从2025年2月18日从纽卡斯尔 - 托恩大学下载https://www.science.org

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐

 27
27 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)