
嵌入式开发实战| GPIO与LED模块全解析:从原理到实战
从LED开始走向更好的自己
🌟 一、GPIO核心概念与模式详解
1. GPIO是什么?
GPIO(通用输入/输出) 是微控制器上可由用户灵活配置的引脚,支持多种工作模式,实现与外部设备的双向交互。
2. GPIO四大工作模式
(1)输入模式
-
功能:读取外部信号(如按键、传感器)。
-
配置要点:
-
启用内部上拉/下拉电阻,避免悬空干扰。
-
支持浮空输入(无上下拉)、上拉输入、下拉输入。
-
(2)输出模式
-
功能:驱动外部设备(如LED、继电器)。
-
子模式:
-
推挽输出(Push-Pull):可输出高/低电平,驱动能力强。
-
开漏输出(Open-Drain):仅拉低电平,高电平需外部上拉电阻。
-
(3)模拟模式
-
功能:处理模拟信号(如ADC采集电压、DAC输出波形)。
-
典型应用:温度传感器信号读取、音频信号生成。
(4)复用功能模式
-
功能:将引脚分配给特定外设(如USART、I2C、PWM)。
-
关键点:
-
同一引脚不可同时用于多个复用功能。
-
需在STM32CubeMX中配置复用映射。
-
示例:
-
PA9/USART1_TX:配置为串口发送引脚。
-
PB3/TIM2_CH2:配置为定时器PWM输出通道。
-
-
🔧 二、推挽 vs 开漏输出:原理、对比与选型
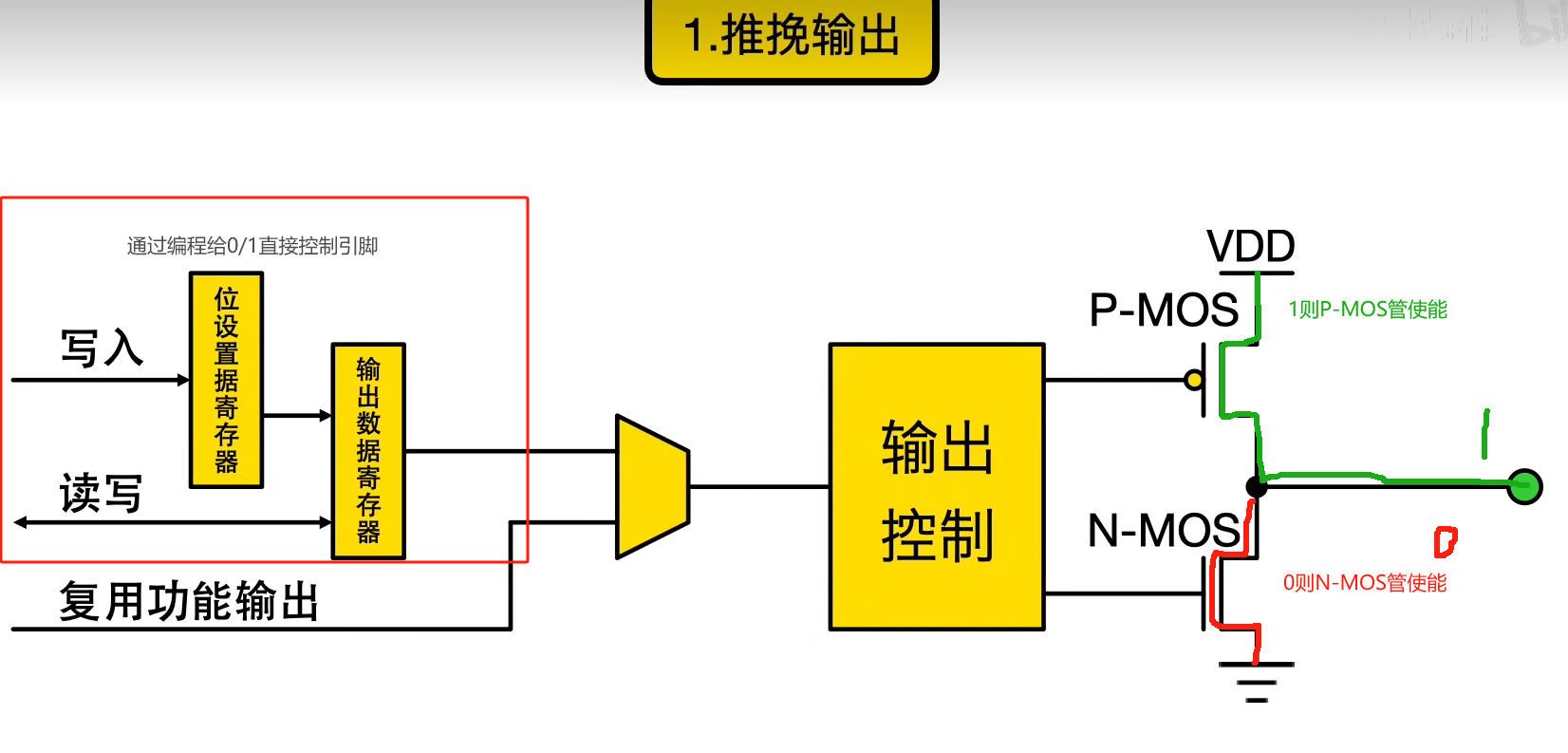
1. 推挽输出(Push-Pull)
-
工作原理:
-
内部通过P-MOS和N-MOS管交替导通,直接驱动高/低电平。
-
-
优点:
-
驱动能力强(可达20mA),适合直接驱动LED、继电器。
-
信号完整性高,抗干扰能力强。
-
-
缺点:
-
高频切换时功耗较高。
-
-
典型应用:LED控制、数字信号输出、开关电路。
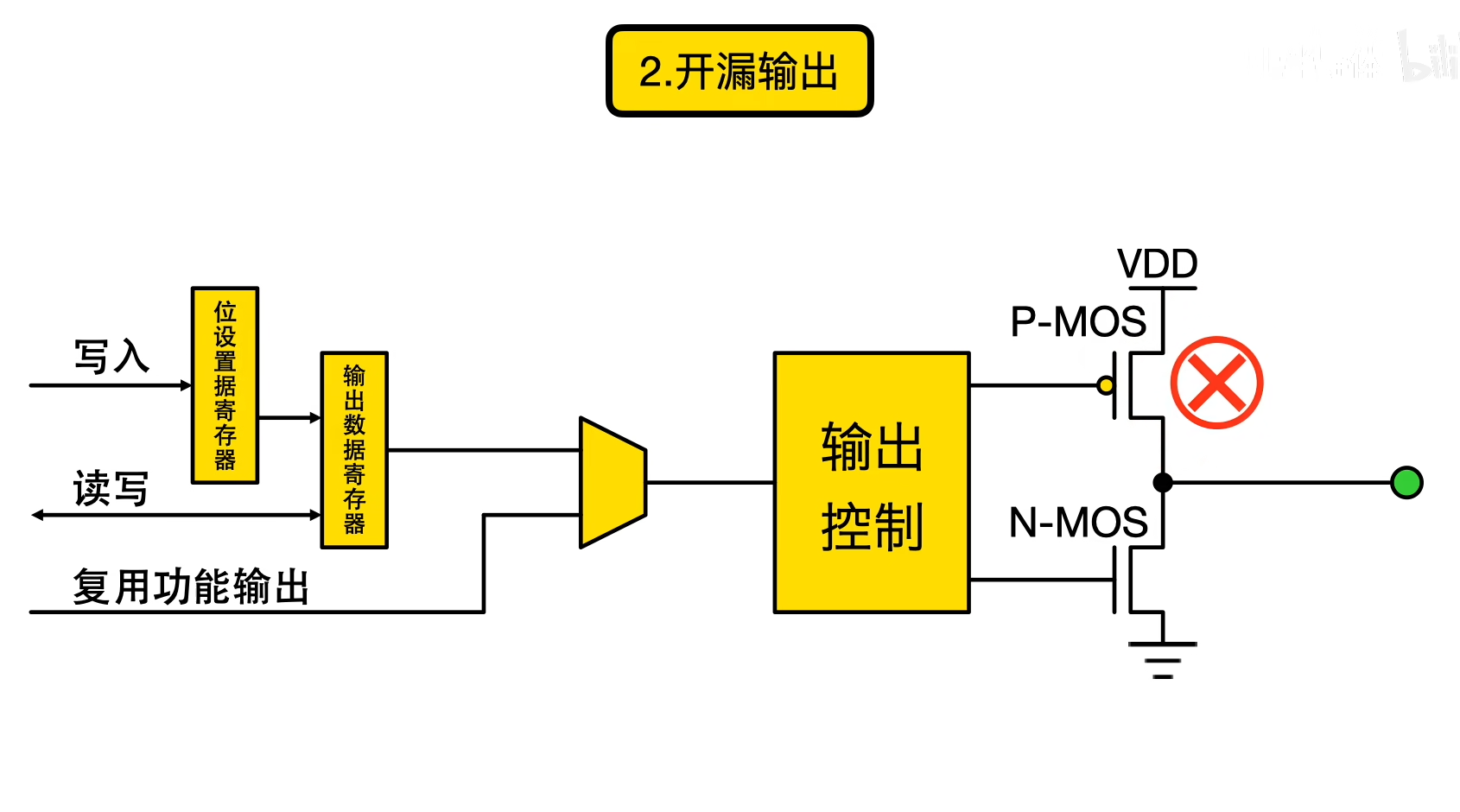
2. 开漏输出(Open-Drain)
-
工作原理:
-
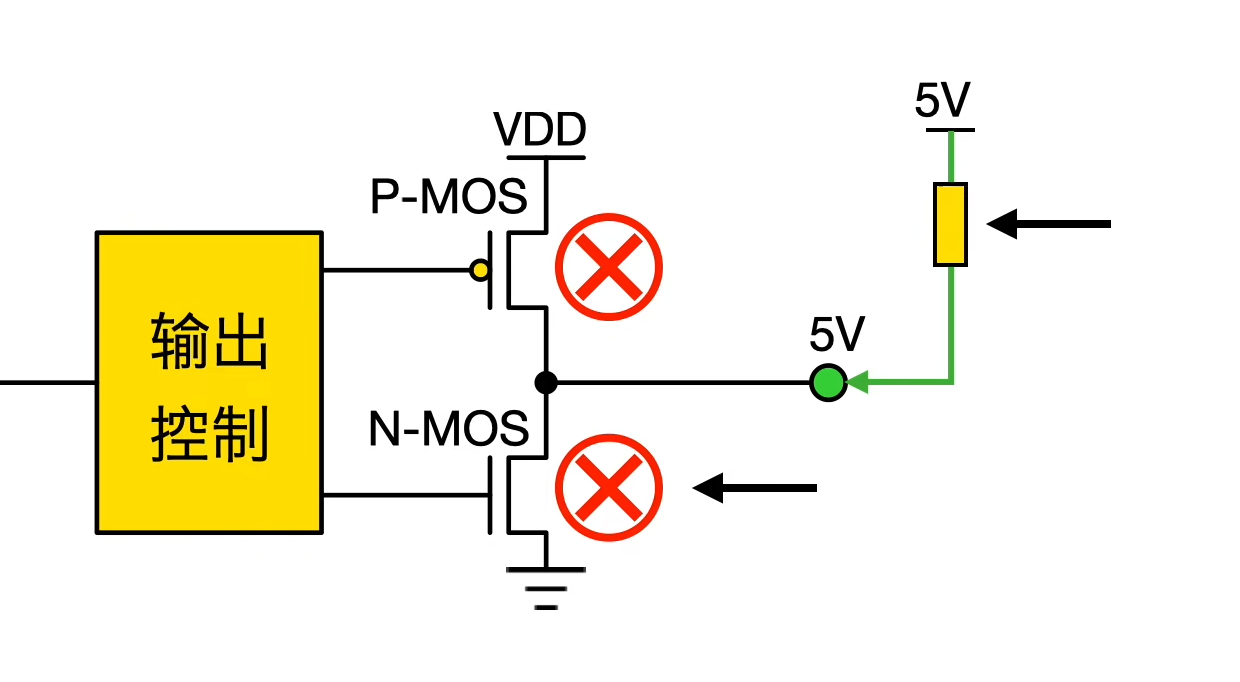
仅N-MOS管可导通,高电平依赖外部上拉电阻。N-MOS管导通时输出低电平,N-MOS管截止时为高阻态,电阻可以看作无穷大,所以此时必须接一个上拉电阻
-
-
优点:
-
支持“线与”逻辑,多设备可共享同一总线(如I2C)。
-
电平兼容性强,可连接不同电压设备。
-
-
缺点:
-
驱动能力依赖外部上拉电阻(需计算阻值)。
-
-
典型应用:I2C通信、多设备中断信号线。
3. 对比表格:关键参数与选型指南
| 特性 | 推挽输出 | 开漏输出 |
|---|---|---|
| 高电平驱动 | 内部直接驱动(3.3V/5V) | 需外部上拉电阻(电压由电阻决定) |
| 低电平驱动 | 内部直接接地 | 内部直接接地 |
| 总线共享能力 | 不支持 | 支持“线与”逻辑 |
| 驱动电流能力 | 强(20mA) | 弱(依赖上拉电阻,通常<10mA) |
| 适用场景 | LED、数字信号、高频信号 | I2C、中断共享线、电平转换 |
| 功耗 | 较高(高频切换时) | 较低(仅拉低时耗电) |
🛠️ 三、STM32 HAL库GPIO配置全流程
1. 基础配置步骤
-
使能GPIO时钟:
__HAL_RCC_GPIOB_CLK_ENABLE(); // 使能GPIOB时钟 -
初始化结构体配置:
GPIO_InitTypeDef GPIO_InitStruct = {0}; GPIO_InitStruct.Pin = GPIO_PIN_12 | GPIO_PIN_13; // 选择多个引脚 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出 GPIO_InitStruct.Pull = GPIO_NOPULL; // 无上下拉 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 高速模式 HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); // 应用配置 -
控制LED状态:
-
点亮:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET); -
熄灭:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET); -
翻转:
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_12);
-
2. 输出速度配置详解
-
GPIO_SPEED_FREQ_LOW:低速(<2MHz),适用于按键检测等低频场景。
-
GPIO_SPEED_FREQ_MEDIUM:中速(10-50MHz),适合普通外设(如SPI)。
-
GPIO_SPEED_FREQ_HIGH:高速(>50MHz),用于高频信号(如PWM、USART)。
3. 功能配置示例(以USART1为例)
-
STM32CubeMX配置:
-
点为输出模式
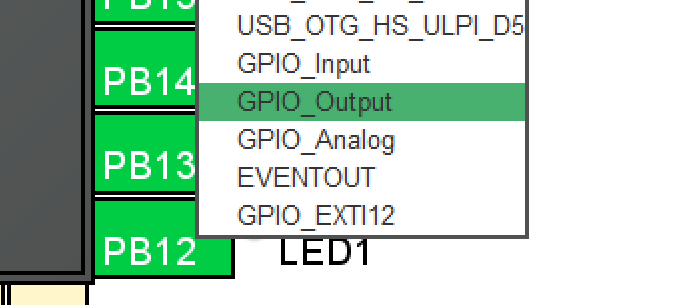
-
-
具体引脚配置:
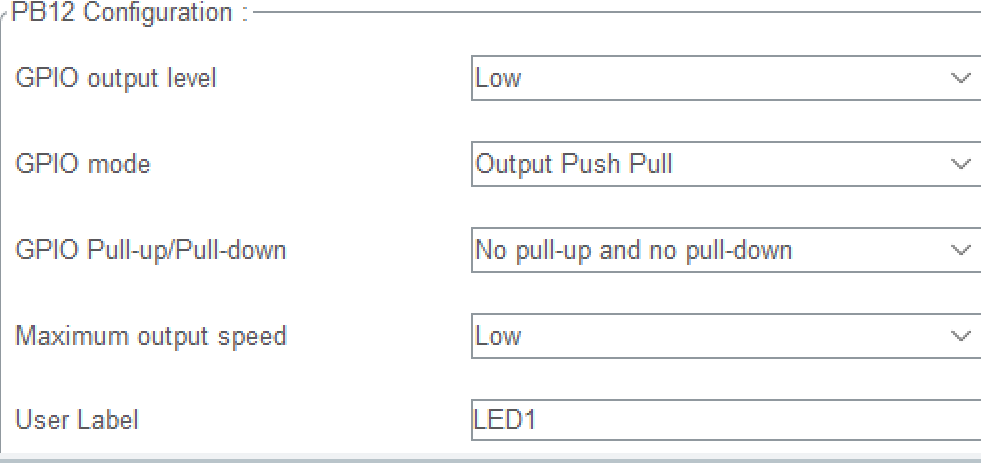
-
理解配置过程:
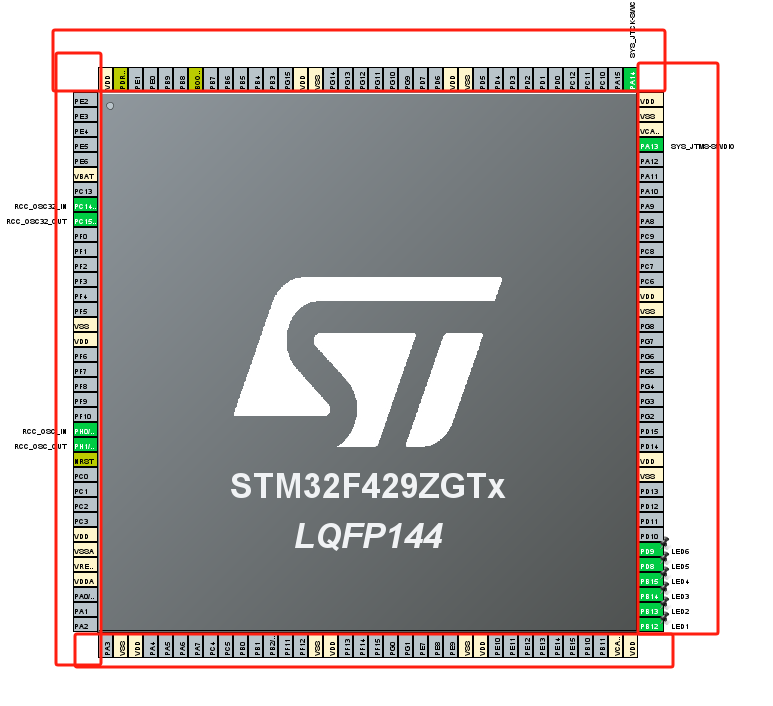
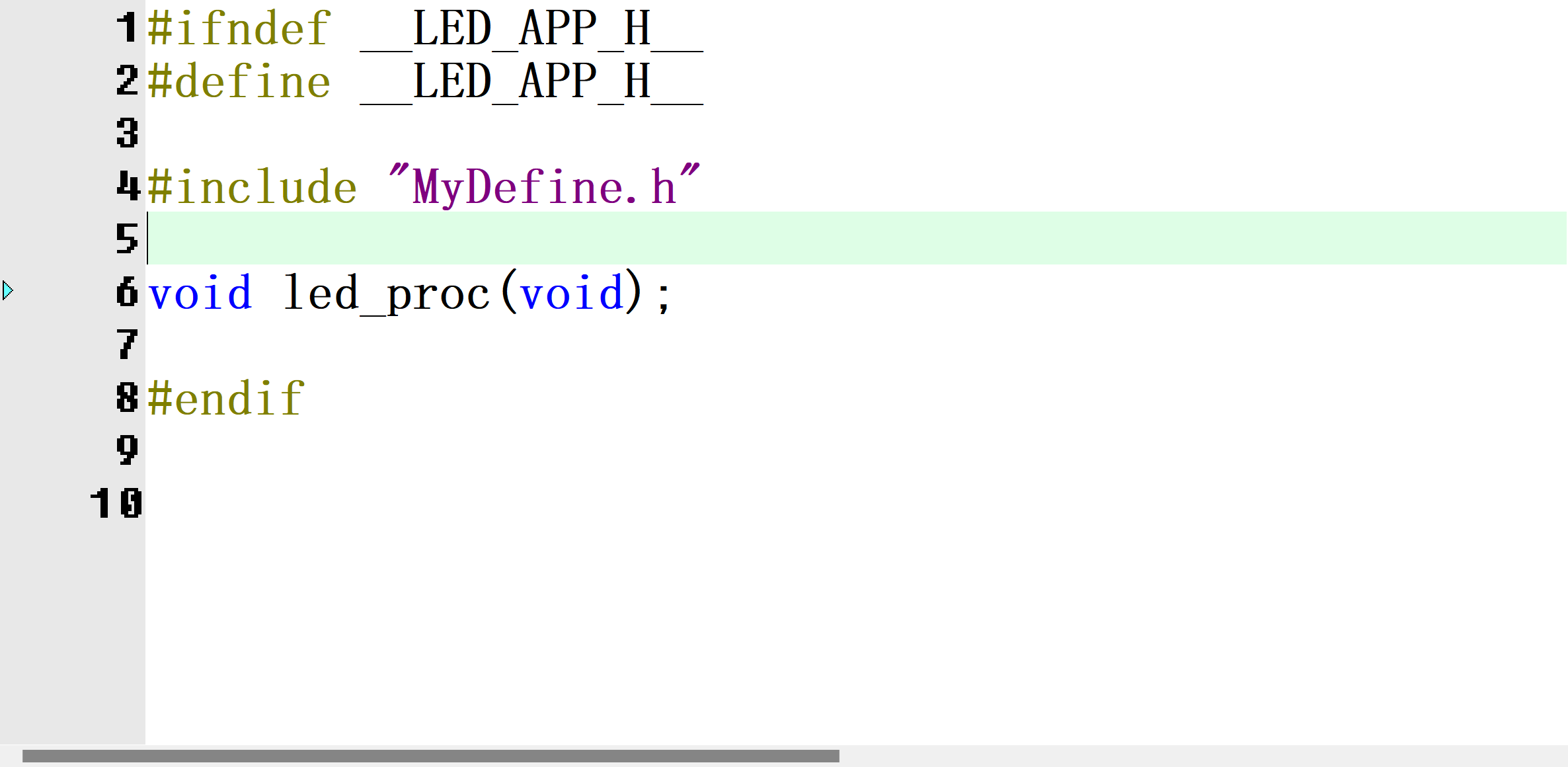
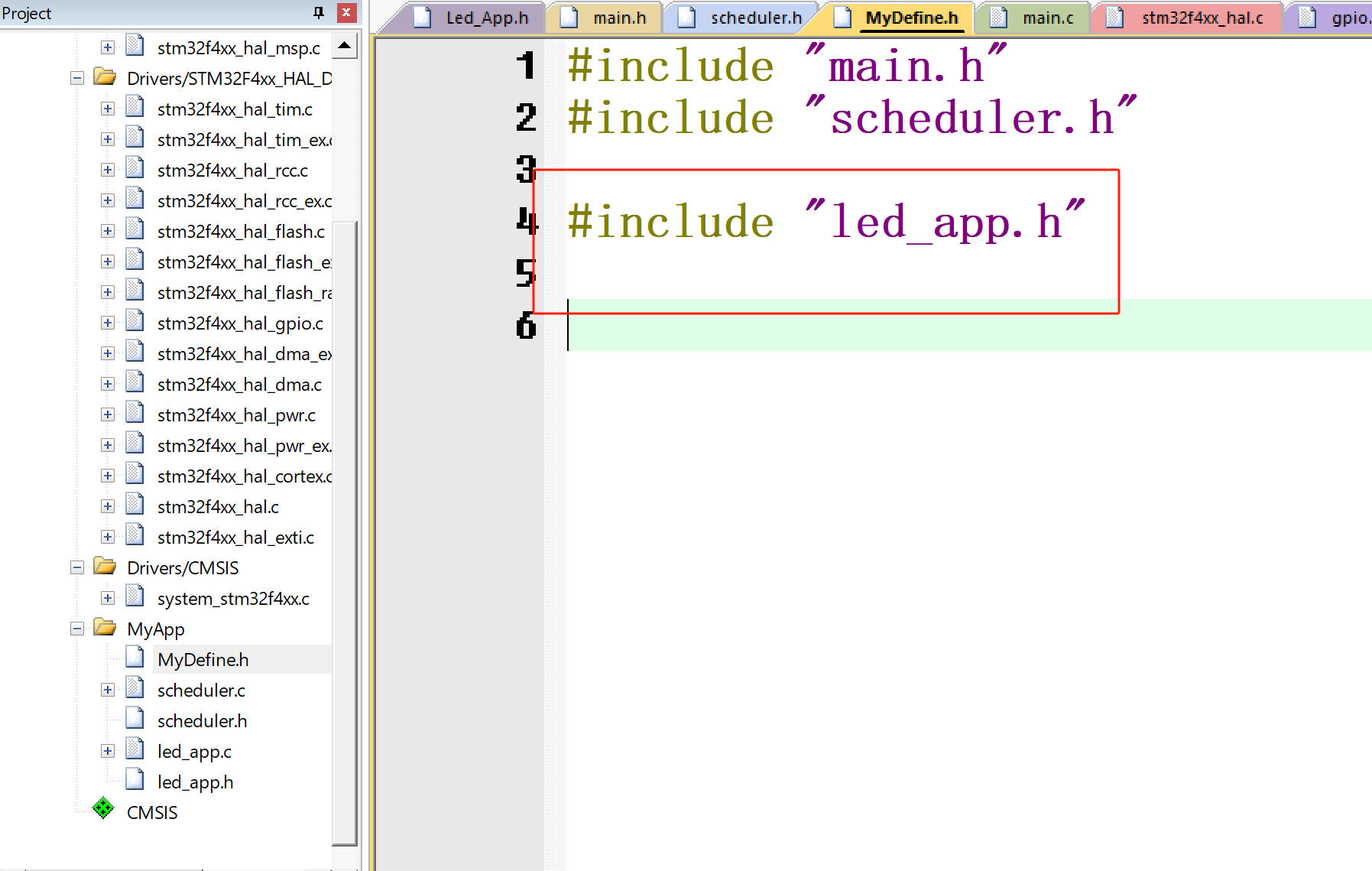
void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; //GPIO初始化结构体 /* GPIO Ports Clock Enable */ //GPIO时钟使能 __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOF_CLK_ENABLE(); __HAL_RCC_GPIOH_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ //GPIO操作函数 HAL_GPIO_WritePin(GPIOB, LED1_Pin|LED2_Pin|LED3_Pin|LED4_Pin, GPIO_PIN_RESET); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOD, LED5_Pin|LED6_Pin, GPIO_PIN_RESET); /*Configure GPIO pin : PF8 */ GPIO_InitStruct.Pin = GPIO_PIN_8; GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; GPIO_InitStruct.Pull = GPIO_NOPULL; HAL_GPIO_Init(GPIOF, &GPIO_InitStruct); /*Configure GPIO pins : PBPin PBPin PBPin PBPin */ GPIO_InitStruct.Pin = LED1_Pin|LED2_Pin|LED3_Pin|LED4_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); /*Configure GPIO pins : PDPin PDPin */ GPIO_InitStruct.Pin = LED5_Pin|LED6_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOD, &GPIO_InitStruct); } /* 1首先定义GPIO配置结构体并初始化为默认值 2使能对应GPIO端口的时钟 3配置引脚模式为推挽输出(对LED最适合) 4设置上拉/下拉配置(LED控制通常不需要) 5设置输出速度(低速即可) 6应用配置到指定的GPIO端口和引脚 */4.创建led_app.c和led_app.h文件
if (temp != temp_old) { // 使用HAL库函数根据temp的值设置对应引脚状态 (假设高电平点亮) HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, (temp & 0x01) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 0 (PB12) HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13, (temp & 0x02) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 1 (PB13) HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, (temp & 0x04) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 2 (PB14) HAL_GPIO_WritePin(GPIOB, GPIO_PIN_15, (temp & 0x08) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 3 (PB15) HAL_GPIO_WritePin(GPIOD, GPIO_PIN_8, (temp & 0x10) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 4 (PD8) HAL_GPIO_WritePin(GPIOD, GPIO_PIN_9, (temp & 0x20) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 5 (PD9) temp_old = temp; // 更新记录的旧状态 } //替换 if (temp != temp_old) { // 使用HAL库函数根据temp的值设置对应引脚状态 (假设高电平点亮) HAL_GPIO_WritePin(GPIOB, LED1_Pin, (temp & 0x01) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 0 (PB12) HAL_GPIO_WritePin(GPIOB, LED2_Pin, (temp & 0x02) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 1 (PB13) HAL_GPIO_WritePin(GPIOB, LED3_Pin, (temp & 0x04) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 2 (PB14) HAL_GPIO_WritePin(GPIOB, LED4_Pin, (temp & 0x08) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 3 (PB15) HAL_GPIO_WritePin(GPIOD, LED5_Pin, (temp & 0x10) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 4 (PD8) HAL_GPIO_WritePin(GPIOD, LED6_Pin, (temp & 0x20) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 5 (PD9) temp_old = temp; // 更新记录的旧状态 }
❗ 四、关键细节与常见问题
1. 为什么LED必须串联限流电阻?
-
计算公式:
R=VCC−VLEDILEDR=ILEDVCC−VLED-
示例:VCC=3.3VVCC=3.3V, VLED=2.1VVLED=2.1V, ILED=10mAILED=10mA → R=120ΩR=120Ω
-
-
选型建议:
-
电阻功率需满足 P=I2×RP=I2×R(通常1/4W足够)。
-
使用贴片电阻(如0805封装)节省空间。
-
2. “线与”逻辑的实现原理
-
场景:多个开漏输出引脚连接至同一总线。
-
规则:
-
所有引脚输出高电平时,总线为高电平(由上拉电阻提供)。
-
任意引脚输出低电平时,总线被拉低。
-
-
应用:I2C总线仲裁、多设备中断共享。
3. HAL库与标准库的区别
-
HAL库:
-
基于STM32CubeMX生成,高度抽象,适合快速开发。
-
提供跨系列兼容性,但代码效率较低。
-
-
标准库:
-
直接操作寄存器,代码精简高效。
-
需手动管理时钟和复用功能,学习成本较高。
-
4.为什么51单片机里没有配置,而32里需要呢?
51单片机的硬件功能不允许。
📢 五、互动与资源
❓ 常见问题答疑
-
Q:GPIO配置后无反应?
-
检查时钟是否使能,引脚是否冲突,硬件连接是否正确。
-
-
Q:开漏输出高电平异常?
-
确认外部上拉电阻已接(通常4.7kΩ-10kΩ)。
-
📝 课后作业
实现按键控制LED模式切换(单击流水灯,双击呼吸灯)。下篇文章公布代码
💡 小贴士:点击顶部「关注」不错过后续的好用小技巧推荐专栏!

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 51
51 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)