
基于LCD12864的万年历与温度监测系统设计与实现
嵌入式系统作为现代智能设备的核心,融合了微控制器、传感器、显示模块及专用软件,广泛应用于工业控制、消费电子和物联网终端。本项目设计一个基于LCD12864显示的万年历与温度监测系统,集成实时时钟(RTC)、温度传感与人机交互功能,体现典型的软硬件协同设计理念。通过该项目,读者可掌握从模块选型、接口通信到系统集成的完整开发流程,理解实时性、低功耗与稳定性在嵌入式设计中的关键作用,为后续深入学习打下坚

简介:该项目“万年历+温度+LCD12864程序”是一个典型的嵌入式系统实践,集成了实时时钟(RTC)用于万年历功能、温度传感器实现环境温度监测,并通过LCD12864液晶屏进行信息可视化。项目包含RTC初始化、温度采集、LCD驱动及数据显示等模块,适用于Arduino、AVR或STM32等微控制器平台。配套完整代码和电路设计,适合嵌入式初学者进行学习与实操,掌握嵌入式系统软硬件协同开发的核心技能。 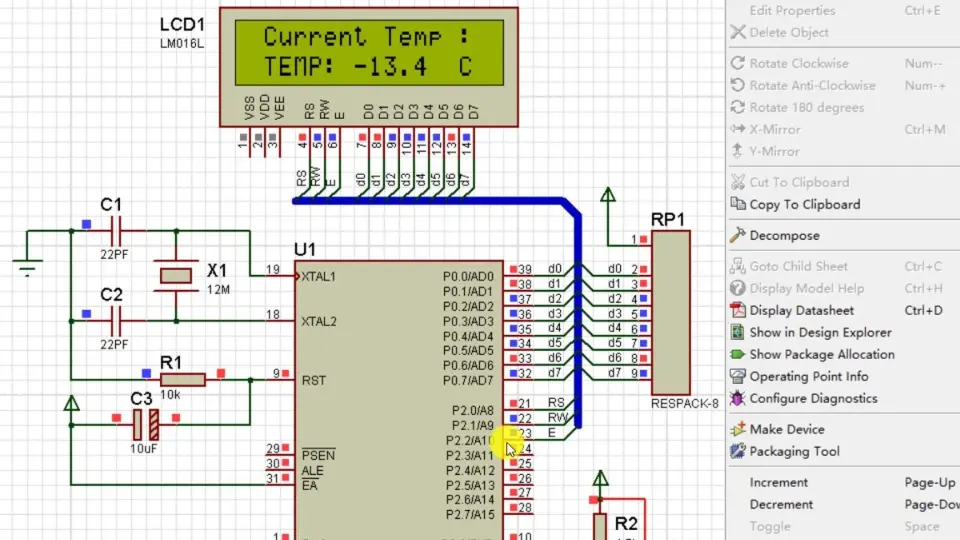
1. 嵌入式系统与项目开发概述
嵌入式系统作为现代智能设备的核心,融合了微控制器、传感器、显示模块及专用软件,广泛应用于工业控制、消费电子和物联网终端。本项目设计一个基于LCD12864显示的万年历与温度监测系统,集成实时时钟(RTC)、温度传感与人机交互功能,体现典型的软硬件协同设计理念。通过该项目,读者可掌握从模块选型、接口通信到系统集成的完整开发流程,理解实时性、低功耗与稳定性在嵌入式设计中的关键作用,为后续深入学习打下坚实基础。
2. 系统核心硬件模块设计
在嵌入式系统中,硬件模块是实现系统功能的物理基础。本章将围绕本项目中所使用的三大核心硬件模块——实时时钟(RTC)模块、温度传感器模块和LCD12864显示屏模块,深入探讨它们的选型依据、硬件连接方式、初始化配置流程以及通信协议。通过对这些模块的详细分析,读者将掌握嵌入式系统中硬件接口设计与驱动开发的基本方法。
2.1 实时时钟(RTC)模块初始化与配置
实时时钟(RTC)模块是嵌入式系统中实现时间管理的关键组件,尤其在万年历功能中起着不可替代的作用。它能够在系统断电或主控芯片休眠时依然保持时间的连续性。本节将介绍RTC模块的功能特性、主流芯片的选型比较、硬件连接方式以及初始化配置流程。
2.1.1 RTC模块的功能与选型依据
RTC模块通常具备以下核心功能:
| 功能项 | 说明 |
|---|---|
| 时间保持功能 | 即使系统断电,通过备用电池维持时间 |
| 闹钟功能 | 可设置时间触发中断或唤醒 |
| 闰年自动补偿 | 自动识别闰年并调整日期 |
| 高精度时钟源 | 通常采用32.768kHz晶体振荡器 |
| 接口兼容性 | 支持I2C、SPI等标准通信协议 |
常见的RTC芯片有DS1302、DS3231等,它们在功耗、精度、功能和接口上各有特点:
| 芯片型号 | 接口类型 | 精度 | 是否内置晶振 | 功能丰富性 | 适用场景 |
|---|---|---|---|---|---|
| DS1302 | 3线串行 | ±2ppm | 否 | 基础功能 | 低功耗简单系统 |
| DS3231 | I2C | ±2ppm | 是(TCXO) | 闹钟、温度补偿 | 高精度时间系统 |
选型建议 :若项目对时间精度要求高,且需要温度补偿功能,推荐使用DS3231;若系统功耗要求低且预算有限,可选择DS1302。
2.1.2 DS1302/DS3231芯片的硬件连接方式
DS1302硬件连接(以MCU为STM32为例)
// 引脚定义示例
#define DS1302_SCLK_PIN GPIO_PIN_5
#define DS1302_IO_PIN GPIO_PIN_6
#define DS1302_RST_PIN GPIO_PIN_7
// 初始化GPIO
void DS1302_GPIO_Init(void) {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = DS1302_SCLK_PIN | DS1302_IO_PIN | DS1302_RST_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
代码分析 :
- 该代码段初始化了DS1302的三个控制引脚:SCLK(时钟)、IO(数据)、RST(复位)。
- 使用GPIO输出模式,模拟3线串行通信。
GPIO_Mode_Out_PP表示推挽输出模式,适合驱动数字信号。
DS3231硬件连接(使用I2C接口)
// I2C初始化示例
void DS3231_I2C_Init(void) {
I2C_InitTypeDef I2C_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
I2C_InitStruct.I2C_Mode = I2C_Mode_I2C;
I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStruct.I2C_OwnAddress1 = 0x00;
I2C_InitStruct.I2C_Ack = I2C_Ack_Enable;
I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStruct.I2C_ClockSpeed = 100000;
I2C_Init(I2C1, &I2C_InitStruct);
I2C_Cmd(I2C1, ENABLE);
}
代码分析 :
- 使用标准I2C接口进行通信,地址为0x68。
- 设置时钟频率为100kHz,满足DS3231的通信要求。
- 启用ACK应答机制,确保通信可靠性。
2.1.3 初始化寄存器设置与时钟校准方法
DS1302寄存器初始化
DS1302通过向特定寄存器写入值来设置时间。例如:
void DS1302_SetTime(uint8_t addr, uint8_t value) {
DS1302_RST_High();
DS1302_WriteByte(addr); // 写入地址
DS1302_WriteByte(value); // 写入数据
DS1302_RST_Low();
}
参数说明 :
addr:寄存器地址,如秒寄存器为0x80。value:要写入的数据,采用BCD编码。
DS3231时间写入示例
void DS3231_WriteReg(uint8_t reg, uint8_t data) {
I2C_GenerateSTART(I2C1, ENABLE);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
I2C_Send7bitAddress(I2C1, DS3231_ADDR, I2C_Direction_Transmitter);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
I2C_SendData(I2C1, reg);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_SendData(I2C1, data);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
I2C_GenerateSTOP(I2C1, ENABLE);
}
代码分析 :
- 使用I2C协议写入指定寄存器地址和数据。
- 每次发送前检查I2C事件是否完成,确保通信稳定。
DS3231_ADDR为0x68。
时钟校准方法
DS3231内置温度补偿机制,可通过以下方式读取温度值:
float DS3231_ReadTemp(void) {
uint8_t temp_msb, temp_lsb;
DS3231_ReadReg(0x11, &temp_msb); // 读取温度高位
DS3231_ReadReg(0x12, &temp_lsb); // 读取温度低位
int16_t temp = (temp_msb << 8) | temp_lsb;
return (float)(temp >> 6) / 4.0f; // 转换为摄氏度
}
逻辑分析 :
- 温度寄存器为16位,高8位为整数部分,低2位为小数部分。
- 除以4是由于每个LSB代表0.25℃。
- 返回值为浮点型温度值,可用于后续补偿计算。
2.2 温度传感器的数据采集机制
温度传感器是嵌入式系统中常用的感知模块之一,用于采集环境温度信息。本节将重点介绍DS18B20这款广泛使用的数字温度传感器,包括其工作原理、通信协议、数据读取方法以及数据解析与格式化处理。
2.2.1 DS18B20的工作原理与接口协议
DS18B20是一款单总线数字温度传感器,具备以下特点:
- 接口协议 :1-Wire总线协议
- 分辨率 :9~12位可配置,默认12位
- 温度范围 :-55℃ ~ +125℃
- 精度 :±0.5℃(-10℃ ~ +85℃范围内)
工作流程 :
graph TD
A[初始化总线] --> B[发送ROM命令]
B --> C[发送功能命令]
C --> D[读取温度数据]
D --> E[解析数据]
2.2.2 单总线通信时序分析与数据读取
DS18B20的通信依赖于严格的时序控制。以下是一个初始化函数的示例:
uint8_t DS18B20_Init(void) {
uint8_t presence;
DS18B20_DQ_OUT(); // 设置为输出
DS18B20_DQ_LOW(); // 拉低总线
delay_us(480); // 持续480us
DS18B20_DQ_IN(); // 设置为输入
delay_us(60); // 等待响应
presence = DS18B20_DQ_READ(); // 读取存在脉冲
delay_us(420); // 等待复位完成
return presence;
}
参数说明 :
presence:返回是否存在设备响应。DS18B20_DQ_LOW():将数据线拉低。delay_us(x):微秒级延时函数,用于精确控制时序。
2.2.3 温度数据的解析与格式化处理
DS18B20返回的数据为16位,其中高位为符号位:
int16_t DS18B20_ReadRawTemp(void) {
uint8_t data[2];
DS18B20_WriteByte(0xCC); // Skip ROM
DS18B20_WriteByte(0x44); // Start conversion
delay_ms(750); // 等待转换完成
DS18B20_WriteByte(0xCC); // Skip ROM
DS18B20_WriteByte(0xBE); // Read Scratchpad
data[0] = DS18B20_ReadByte(); // LSB
data[1] = DS18B20_ReadByte(); // MSB
return (int16_t)((data[1] << 8) | data[0]);
}
数据解析函数 :
float DS18B20_ConvertTemp(int16_t raw) {
float temperature;
if(raw & 0x8000) { // 判断是否为负数
raw = ~raw + 1;
temperature = -(raw * 0.0625);
} else {
temperature = raw * 0.0625;
}
return temperature;
}
逻辑分析 :
raw & 0x8000判断最高位是否为1,即是否为负数。- 12位分辨率对应每个LSB为0.0625℃。
- 返回浮点型温度值,便于后续显示与处理。
2.3 LCD12864显示屏的驱动与通信
LCD12864是一种常见的图形点阵液晶屏,支持字符和图形混合显示。本节将探讨其引脚功能、通信协议选择、初始化流程以及显示缓冲区的管理方式。
2.3.1 LCD12864的引脚功能与工作模式
LCD12864通常有20个引脚,其主要功能如下表:
| 引脚编号 | 名称 | 功能说明 |
|---|---|---|
| 1 | VSS | 接地 |
| 2 | VCC | 电源 |
| 3 | VO | 对比度调节 |
| 4 | RS | 寄存器选择(0为指令,1为数据) |
| 5 | R/W | 读写选择(0为写,1为读) |
| 6 | E | 使能信号 |
| 7~14 | DB0~DB7 | 数据总线 |
| 15 | CS1 | 片选1 |
| 16 | CS2 | 片选2 |
| 17 | RST | 复位 |
工作模式 :
- 并行模式 :DB0~DB7作为数据总线,适合快速传输。
- 串行模式 :通过SPI或I2C接口控制,节省引脚资源。
2.3.2 SPI与I2C通信协议的比较与选择
| 协议类型 | 引脚数 | 速率 | 优点 | 缺点 |
|---|---|---|---|---|
| SPI | 4 | 高 | 高速传输,结构简单 | 引脚多,占用资源 |
| I2C | 2 | 中 | 引脚少,支持多设备 | 速率较低,需时序控制 |
推荐选择 :若MCU引脚资源充足,优先使用SPI;若资源紧张,可选择I2C。
2.3.3 初始化序列与显示缓冲区管理
LCD12864初始化示例(并行模式)
void LCD12864_Init(void) {
LCD_RS_LOW();
LCD_RW_LOW();
LCD_E_LOW();
delay_ms(20);
LCD_WriteCmd(0x30); // 基本指令集
delay_ms(5);
LCD_WriteCmd(0x0C); // 显示开,关闭光标
delay_ms(5);
LCD_WriteCmd(0x01); // 清屏
delay_ms(15);
LCD_WriteCmd(0x06); // 光标右移
}
代码分析 :
LCD_RS_LOW()设置为指令模式。LCD_WriteCmd()函数用于发送指令。- 初始化完成后,LCD进入基本显示模式。
显示缓冲区管理
为了提高显示效率,通常使用显示缓冲区(Frame Buffer)进行离线绘制:
#define LCD_WIDTH 128
#define LCD_HEIGHT 64
uint8_t lcd_buffer[LCD_WIDTH * LCD_HEIGHT / 8]; // 128x64, 1bit/pixel
void LCD_SetPixel(uint8_t x, uint8_t y, uint8_t color) {
uint16_t index = (y / 8) * LCD_WIDTH + x;
if(color) {
lcd_buffer[index] |= (1 << (y % 8));
} else {
lcd_buffer[index] &= ~(1 << (y % 8));
}
}
逻辑分析 :
- 使用1bit/pixel存储方式,节省内存。
index为字节地址,y % 8表示位位置。- 设置像素点时,通过位操作更新缓冲区。
3. 嵌入式软件设计与算法实现
在嵌入式系统中,软件不仅是硬件功能的驱动者,更是整个系统智能化、用户友好性和稳定性的重要保障。本项目基于LCD12864显示万年历与温度监测系统,其核心不仅依赖于实时时钟(RTC)和DS18B20温度传感器等硬件模块,更需要一套高效、精准且可维护的软件架构来支撑复杂的数据处理、界面渲染与交互逻辑。本章将深入剖析系统中的关键算法与程序实现机制,重点围绕 万年历计算 、 温度数据处理 以及 显示界面优化 三大核心任务展开,揭示从数学原理到代码落地的完整路径。
软件设计不仅要满足功能需求,还需兼顾资源限制、响应速度与能耗控制。以Zeller公式为核心的日期推算方法,解决了无操作系统支持下的日历自动生成难题;而针对DS18B20输出原始值存在的波动问题,则引入了滑动平均滤波与线性补偿相结合的策略,提升测温精度;同时,在有限的LCD12864图形空间内构建清晰直观的人机界面,涉及字符绘制、动态刷新与多页面切换机制的设计。这些环节共同构成了一个完整的嵌入式应用闭环。
此外,所有算法均需在MCU资源受限环境下运行——典型如8位或32位微控制器,Flash与RAM容量较小,运算能力有限。因此,代码必须高度优化,避免浮点运算滥用,减少堆栈开销,并确保中断上下文的安全性。通过合理划分模块、使用状态机管理UI流程、结合定时器中断触发更新任务,系统实现了高实时性与低延迟响应的平衡。
以下章节将分别对上述三个关键技术方向进行逐层剖析,结合数学模型、程序代码、数据结构与流程图,展示如何将抽象逻辑转化为可在裸机环境中稳定运行的嵌入式程序。
3.1 万年历算法的理论与实现
万年历功能是本系统的核心亮点之一,它要求能够在没有外部网络校时的情况下,独立计算任意给定日期对应的星期、节气甚至节假日信息。由于嵌入式平台通常不具备操作系统级别的日历服务(如Linux的 struct tm 或RTC自动解析),必须依靠开发者自行实现日期推算算法。这不仅涉及基本的年月日合法性判断,还包括闰年规则、月份天数变化、星期计算等多个维度的综合处理。
3.1.1 历法基础与日期计算难点
公历(格里高利历)是一种阳历体系,其基本单位为“年”,平均长度约为365.2425天。为了弥补地球绕太阳公转周期与整数天之间的偏差,引入了 闰年机制 :每四年一闰,但百年不闰,四百年再闰。具体规则如下:
- 能被4整除但不能被100整除的年份为闰年;
- 能被400整除的年份也为闰年。
这一规则导致每年的天数并非固定,2月可能为28或29天,从而使得跨月计算变得复杂。此外,用户常需知道某一天是星期几,以便安排作息或节日提醒。传统做法是维护一个基准日期(如1970年1月1日为星期四),然后通过累加天数取模7得到星期值。然而这种方法在跨多年时效率低下,尤其在启动时重新计算整个时间轴会消耗大量CPU周期。
另一个挑战在于 非周期性节假日 的标记,例如中国的农历春节、端午节等,它们基于阴阳合历,无法通过简单公式直接映射到公历日期。对于此类需求,一般采用查表法预存未来若干年的节日对照关系,牺牲少量存储空间换取计算效率。
为解决上述问题,本系统采用 Zeller公式 作为核心算法,实现快速、准确的星期计算,辅以闰年判断和月份天数查找表,完成完整的日历生成功能。
| 月份 | 天数(平年) | 天数(闰年) |
|---|---|---|
| 1月 | 31 | 31 |
| 2月 | 28 | 29 |
| 3月 | 31 | 31 |
| 4月 | 30 | 30 |
| 5月 | 31 | 31 |
| 6月 | 30 | 30 |
| 7月 | 31 | 31 |
| 8月 | 31 | 31 |
| 9月 | 30 | 30 |
| 10月 | 31 | 31 |
| 11月 | 30 | 30 |
| 12月 | 31 | 31 |
该表格用于程序中通过数组索引快速获取每月天数:
const uint8_t days_in_month[2][13] = {
{0, 31, 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31}, // 平年
{0, 31, 29, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31} // 闰年
};
参数说明 :
days_in_month[is_leap][month]可根据是否为闰年动态选择对应行,实现灵活访问。
3.1.2 Zeller公式的数学推导与程序实现
Zeller公式是由德国数学家克里斯蒂安·蔡勒(Christian Zeller)提出的一种用于计算格里高利历中任意日期对应星期几的算法。其标准形式如下:
h = \left( q + \left\lfloor \frac{13(m+1)}{5} \right\rfloor + K + \left\lfloor \frac{K}{4} \right\rfloor + \left\lfloor \frac{J}{4} \right\rfloor - 2J \right) \mod 7
其中:
- $ h $:星期几(0=周六, 1=周日, …, 6=周五)
- $ q $:日期中的日(day)
- $ m $:月份(3 ≤ m ≤ 14),1月和2月视为上一年的13月和14月
- $ K $:年份的后两位(year % 100)
- $ J $:年份的前两位(year / 100)
注意:该公式要求将1月和2月当作前一年的13月和14月处理,即若当前为1月,则年份减1,月份设为13。
下面将其转换为C语言函数实现:
/**
* 使用Zeller公式计算指定日期是星期几
* 返回值:0=周一, 1=周二, ..., 6=周日(便于LCD显示)
*/
uint8_t zeller_weekday(uint16_t year, uint8_t month, uint8_t day) {
if (month < 3) {
month += 12;
year--;
}
int k = year % 100;
int j = year / 100;
int h = (day + (13 * (month + 1)) / 5 + k + k / 4 + j / 4 - 2 * j) % 7;
// 调整返回值范围为0~6,0表示周一
return (h + 5) % 7; // 将原结果(0=Sat)调整为(0=Mon)
}
逐行逻辑分析 :
- 第4–6行:修正1月、2月为前一年的13、14月,这是Zeller公式的必要前置条件。
- 第7–8行:提取年份的世纪部分(j)与年份后两位(k),用于代入公式。
- 第9行:执行Zeller核心计算,使用整数除法模拟floor操作。
- 第12行:(h + 5) % 7实现星期映射转换。原始公式中h=0表示星期六,不符合中文习惯(通常以周一为起点),故整体偏移并取模,使返回值0代表周一。
该函数可在毫秒级时间内完成计算,适用于频繁调用的场景,如每日刷新或手动切换日期时实时更新星期显示。
3.1.3 闰年判断与节假日标记机制
闰年判断是日历系统的基础功能,直接影响2月天数的确定。其实现非常简洁:
/**
* 判断是否为闰年
* 返回值:1=闰年,0=平年
*/
uint8_t is_leap_year(uint16_t year) {
return (year % 4 == 0 && year % 100 != 0) || (year % 400 == 0);
}
参数说明 :输入年份
year为四位数字(如2024),输出布尔值决定是否启用闰年天数表。
在此基础上,可构建完整的日期合法性校验函数:
uint8_t is_valid_date(uint16_t year, uint8_t month, uint8_t day) {
if (year < 1900 || year > 2100 || month == 0 || month > 12) return 0;
uint8_t leap = is_leap_year(year);
uint8_t max_days = days_in_month[leap][month];
return day >= 1 && day <= max_days;
}
对于节假日标记,考虑到农历节日难以用公式表达,采用静态查表法更为实际。例如定义一个结构体数组存储未来十年的重要节日:
typedef struct {
uint16_t year;
uint8_t month;
uint8_t day;
const char* name;
} holiday_t;
const holiday_t holidays[] = {
{2024, 2, 10, "春节"},
{2024, 4, 4, "清明节"},
{2024, 6, 10, "端午节"},
{2024, 9, 17, "中秋节"}
// ... 更多节日
};
在UI刷新时遍历此表,匹配当前日期即可高亮显示节日名称。
graph TD
A[开始计算星期] --> B{月份<3?}
B -->|是| C[month+=12, year--]
B -->|否| D[保持原值]
C --> E[计算K=year%100]
D --> E
E --> F[计算J=year/100]
F --> G[代入Zeller公式]
G --> H[取模得h]
H --> I[调整为周一至周日]
I --> J[返回weekday]
该流程图清晰展示了Zeller公式的执行路径,体现了条件分支与数学运算的结合,适用于教学与调试参考。
3.2 温度数据的软件处理流程
温度监测是本系统的另一核心功能,依赖DS18B20传感器采集环境温度。尽管该传感器具备±0.5°C的标称精度,但在实际部署中仍面临噪声干扰、ADC量化误差及环境突变带来的读数跳变问题。为此,必须在软件层面实施一系列数据处理策略,包括滤波、单位转换与报警机制。
3.2.1 数据滤波与误差补偿算法
原始温度数据往往包含随机抖动,尤其在电源不稳定或布线较长时更为明显。常用的滤波方法有:
- 滑动平均滤波 :保留最近N次采样值,求平均
- 中值滤波 :排序后取中间值,抗脉冲干扰强
- 卡尔曼滤波 :适用于动态系统,但计算开销大
鉴于MCU资源限制,本系统采用 改进型滑动平均+阈值限幅 组合策略:
#define FILTER_SIZE 5
float temp_filter_buffer[FILTER_SIZE];
uint8_t filter_index = 0;
uint8_t filter_full = 0;
float apply_filter(float new_temp) {
temp_filter_buffer[filter_index] = new_temp;
filter_index = (filter_index + 1) % FILTER_SIZE;
if (!filter_full && filter_index == 0) filter_full = 1;
float sum = 0.0f;
uint8_t count = filter_full ? FILTER_SIZE : filter_index;
for (int i = 0; i < count; i++) {
sum += temp_filter_buffer[i];
}
return sum / count;
}
参数说明 :
-FILTER_SIZE:窗口大小,权衡响应速度与平滑度
-temp_filter_buffer:环形缓冲区存储历史数据
-filter_index:当前写入位置指针
-filter_full:标志缓冲区是否已满,影响有效样本数
该算法每次仅需O(N)加法与一次除法,适合在中断服务程序外周期调用。
为进一步消除系统性偏差(如传感器自身偏移),引入线性补偿:
float compensate_temperature(float raw_temp) {
float offset = 0.3f; // 校准得出的偏移量
return raw_temp + offset;
}
补偿值可通过对比标准温度计在多个温度点下测得的差值拟合获得。
3.2.2 摄氏度与华氏度转换方法
为满足不同用户的习惯,系统支持摄氏度(℃)与华氏度(℉)切换显示。两者换算关系为:
°F = °C × \frac{9}{5} + 32
对应代码实现:
float celsius_to_fahrenheit(float c) {
return c * 9.0f / 5.0f + 32.0f;
}
float fahrenheit_to_celsius(float f) {
return (f - 32.0f) * 5.0f / 9.0f;
}
注意事项 :应尽量避免频繁浮点运算,可在配置变更时统一转换一次,缓存结果供显示使用。
3.2.3 超限报警与阈值设定
当温度超出安全范围时,系统应触发声光报警。设置上下限阈值并通过GPIO控制蜂鸣器:
#define TEMP_HIGH_THRESHOLD 35.0f
#define TEMP_LOW_THRESHOLD 0.0f
void check_temperature_alarm(float current_temp) {
if (current_temp > TEMP_HIGH_THRESHOLD) {
set_buzzer(1); // 开启蜂鸣器
lcd_show_warning("高温警报!");
} else if (current_temp < TEMP_LOW_THRESHOLD) {
set_buzzer(1);
lcd_show_warning("低温警报!");
} else {
set_buzzer(0); // 正常则关闭
}
}
用户可通过按键修改阈值,参数保存至EEPROM以防掉电丢失。
flowchart LR
A[读取DS18B20原始值] --> B[补偿校准]
B --> C[应用滑动平均滤波]
C --> D{是否超限?}
D -->|是| E[触发报警]
D -->|否| F[正常显示]
E --> G[点亮LED+鸣响蜂鸣器]
F --> H[更新LCD数值]
该流程图展现了温度处理全流程,突出异常检测与反馈机制的设计思路。
3.3 显示界面的编程与优化
LCD12864是一款128×64像素的图形型液晶屏,支持汉字库,非常适合本地化信息展示。但由于其采用行列寻址方式,直接操作显存较为繁琐,需建立高效的绘图抽象层。
3.3.1 字符与图形在LCD12864上的绘制原理
LCD12864内部划分为8页(Page 0–7),每页64行,每列8位组成一个字节。坐标系以左上角为原点,X轴向右,Y轴向下。写入显存时需先设置页地址和列地址。
绘制单个点的函数如下:
void lcd_set_pixel(uint8_t x, uint8_t y, uint8_t color) {
if (x >= 128 || y >= 64) return;
uint8_t page = y / 8;
uint8_t bit = y % 8;
uint8_t data = lcd_gram[page][x];
if (color)
data |= (1 << bit);
else
data &= ~(1 << bit);
lcd_gram[page][x] = data;
}
参数说明 :
-lcd_gram[8][128]:模拟显存的二维数组
-page = y / 8:确定所在页
-bit = y % 8:确定字节内位位置
- 写入前需合并原有数据,防止覆盖其他像素
基于此可扩展出画线、矩形、文本等功能。
3.3.2 动态刷新机制与界面布局设计
为降低功耗与闪烁,采用 局部刷新+脏标记 机制:
uint8_t screen_dirty = 1;
void refresh_screen() {
if (screen_dirty) {
lcd_write_gram(); // 全局写入显存
screen_dirty = 0;
}
}
主循环中仅当数据变化时才置位 screen_dirty ,避免无效刷新。
典型界面布局如下表所示:
| 区域 | 内容 | 坐标范围 |
|---|---|---|
| 顶部栏 | 当前时间(HH:MM:SS) | (0,0) ~ (127,7) |
| 中部左侧 | 日期(YYYY-MM-DD W) | (0,16) ~ (63,31) |
| 中部右侧 | 温度值(XX.X ℃) | (64,16) ~ (127,31) |
| 底部栏 | 节日/报警信息 | (0,56) ~ (127,63) |
各区域独立更新,互不影响。
3.3.3 多页面显示与用户交互优化
通过按键实现菜单切换,使用状态机管理UI:
typedef enum {
UI_CLOCK,
UI_CALENDAR,
UI_SETTINGS
} ui_state_t;
ui_state_t current_ui = UI_CLOCK;
void handle_ui() {
switch (current_ui) {
case UI_CLOCK:
render_clock_page();
break;
case UI_CALENDAR:
render_calendar_page();
break;
case UI_SETTINGS:
render_settings_page();
break;
}
}
长按“Mode”键进入设置页,短按切换显示模式,提升用户体验。
stateDiagram-v2
[*] --> ClockPage
ClockPage --> CalendarPage: 按键短按
CalendarPage --> SettingsPage: 长按Mode
SettingsPage --> ClockPage: 超时退出
SettingsPage --> CalendarPage: 返回
该状态图清晰表达了UI状态迁移逻辑,有助于多人协作开发与后期维护。
综上所述,本章详细阐述了嵌入式系统中三大核心软件模块的设计与实现,涵盖算法建模、代码实现、性能优化与人机交互设计,形成了完整的软件工程实践范例。
4. 中断机制与系统协同控制
嵌入式系统的核心在于实时性与高效性,而中断机制正是实现这一目标的关键技术之一。通过中断,系统可以对外部事件做出快速响应,避免因轮询方式带来的资源浪费与延迟。本章将围绕定时中断服务程序的设计、软硬件协同控制策略、以及系统调试与故障排查方法展开深入探讨,重点在于如何利用中断机制提升系统响应效率、协调多模块协同工作,并在开发过程中有效定位与解决潜在问题。
4.1 定时中断服务程序的设计
在嵌入式系统中,定时中断是最常见的中断类型之一。它用于实现周期性任务调度、时间计数、定时刷新等功能。本节将从中断系统的基本结构入手,详细分析定时器的配置方法,并通过实际代码演示如何设计一个高效、稳定的定时中断服务程序。
4.1.1 中断系统的基本结构与工作流程
中断系统是嵌入式处理器响应外部或内部事件的重要机制。其核心结构包括:
- 中断源 :可以是定时器、串口、外部引脚等。
- 中断向量表 :存储各个中断服务程序(ISR)的入口地址。
- 中断控制器 :负责中断优先级管理、中断屏蔽与使能。
- 中断服务程序 :中断触发后执行的处理函数。
中断处理的基本流程如下:
- 外部事件触发中断信号。
- CPU暂停当前执行流程,保存上下文。
- 跳转至中断向量表中对应的中断服务程序。
- 执行中断服务程序。
- 恢复上下文,继续执行主程序。
以下是一个典型的中断响应流程图(使用Mermaid语法):
graph TD
A[主程序运行] --> B{中断请求发生?}
B -->|是| C[保存当前状态]
C --> D[跳转至中断向量表]
D --> E[执行中断服务程序]
E --> F[恢复状态]
F --> G[返回主程序继续执行]
B -->|否| A
4.1.2 定时器的配置与时间片管理
以STM32F1系列MCU为例,使用TIM2定时器实现1ms中断:
#include "stm32f10x.h"
void TIM2_Init(void) {
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); // 使能TIM2时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_TimeBaseStruct.TIM_Period = 999; // 自动重装载值(1ms)
TIM_TimeBaseStruct.TIM_Prescaler = 71; // 预分频值(72MHz / 72 = 1MHz)
TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStruct.TIM_ClockDivision = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStruct); // 初始化TIM2
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); // 使能更新中断
TIM_Cmd(TIM2, ENABLE); // 启动定时器
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct); // 配置NVIC
}
void TIM2_IRQHandler(void) {
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {
// 处理中断逻辑
static uint32_t tick = 0;
tick++;
if (tick % 1000 == 0) {
// 每1秒执行一次
}
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // 清除中断标志位
}
}
逻辑分析与参数说明
- RCC_APB1PeriphClockCmd :使能TIM2的时钟源,确保定时器能正常工作。
- TIM_Period :设定计数周期,决定了定时器中断的时间间隔。此处为1000,表示在1MHz频率下计数1000次,即1ms。
- TIM_Prescaler :预分频器,用于将主频72MHz分频为1MHz,便于精确控制。
- NVIC配置 :设置中断优先级,确保中断能被及时响应。
- TIM_ClearITPendingBit :清除中断标志位,防止重复进入中断。
4.1.3 实现周期性任务调度的逻辑设计
中断服务程序应尽量简洁,避免在其中执行耗时操作。可以使用一个全局标志位来通知主程序执行任务:
volatile uint8_t flag_1ms = 0;
void TIM2_IRQHandler(void) {
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {
flag_1ms = 1; // 设置标志位
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
int main(void) {
TIM2_Init();
while (1) {
if (flag_1ms) {
// 执行1ms周期任务
flag_1ms = 0;
}
}
}
此设计将中断处理与主循环分离,避免了在中断中直接执行复杂操作,提高了系统的稳定性与可维护性。
4.2 软硬件协同控制策略
在本项目中,多个硬件模块(如温度传感器、LCD显示屏)需要协同工作。如何高效地管理这些模块的交互,是提升系统性能的关键。
4.2.1 传感器与显示屏的同步更新机制
为了确保传感器数据与显示刷新同步,可使用定时中断作为主时钟源,控制各模块的采样与更新频率。
以下是一个多模块协同更新的流程图:
graph TD
A[定时中断触发] --> B[读取温度传感器数据]
B --> C[更新万年历时间]
C --> D[刷新LCD显示]
D --> E[等待下一次中断]
代码示例:
volatile uint8_t update_flag = 0;
void TIM2_IRQHandler(void) {
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {
update_flag = 1;
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
int main(void) {
TIM2_Init();
DS18B20_Init();
LCD12864_Init();
while (1) {
if (update_flag) {
float temperature = DS18B20_ReadTemp();
RTC_UpdateTime();
LCD12864_Update(temperature);
update_flag = 0;
}
}
}
4.2.2 中断优先级与资源竞争解决方案
在多中断系统中,若多个中断同时发生,需通过优先级管理确保关键任务优先执行。STM32支持中断嵌套机制,可通过NVIC配置实现:
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 设置优先级分组
// 配置高优先级中断(如串口)
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
// 配置低优先级中断(如定时器)
NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
此外,为避免多个中断同时访问共享资源(如LCD缓冲区),可采用 互斥锁机制 或 临界区保护 :
__disable_irq(); // 关闭全局中断
// 访问共享资源
__enable_irq(); // 恢复中断
4.2.3 系统低功耗运行模式设计
为降低功耗,系统可在无任务时进入待机模式。以STM32为例,使用WFI(Wait For Interrupt)指令进入休眠:
void Enter_LowPower_Mode(void) {
__WFI(); // 等待中断唤醒
}
int main(void) {
TIM2_Init();
while (1) {
if (update_flag) {
// 更新传感器与显示
update_flag = 0;
} else {
Enter_LowPower_Mode(); // 进入低功耗模式
}
}
}
该机制确保系统仅在有任务时唤醒,显著降低整体功耗。
4.3 系统调试与故障排查方法
在嵌入式开发过程中,调试与问题排查是不可或缺的环节。本节将介绍几种常用的调试技术与排查方法。
4.3.1 使用调试器进行断点调试
使用JTAG/SWD接口连接调试器(如ST-Link、J-Link),通过IDE(如Keil、IAR、STM32CubeIDE)设置断点、单步执行、查看寄存器状态等。
例如,在Keil中设置断点后,可查看变量值、堆栈信息、寄存器状态等,快速定位执行异常点。
4.3.2 日志输出与串口监控技术
通过串口输出调试信息,是嵌入式开发中常用的日志方式。以下为使用USART1输出调试日志的代码:
void USART1_Init(void) {
// 初始化USART1,波特率9600
}
void USART1_SendChar(char ch) {
while (!USART_GetFlagStatus(USART1, USART_FLAG_TXE));
USART_SendData(USART1, ch);
}
void USART1_SendString(char *str) {
while (*str) {
USART1_SendChar(*str++);
}
}
int main(void) {
USART1_Init();
USART1_SendString("System started\r\n");
while (1) {
// 主循环
}
}
使用串口助手(如XCOM、Tera Term)查看输出日志,有助于分析程序执行流程与错误信息。
4.3.3 常见问题分析与解决方案汇总
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 中断未响应 | 中断未使能、优先级配置错误 | 检查NVIC配置与中断使能 |
| 显示异常 | 显示初始化失败、通信协议错误 | 检查SPI/I2C通信与引脚连接 |
| 温度读取失败 | DS18B20未初始化、总线冲突 | 检查单总线时序与上拉电阻 |
| 系统死机 | 死循环、堆栈溢出 | 使用调试器单步执行,查看寄存器状态 |
| 功耗过高 | 未进入低功耗模式 | 检查唤醒机制与休眠条件 |
通过上述方法,开发者可以快速定位问题并优化系统稳定性。
结语 :本章深入探讨了中断机制在嵌入式系统中的应用,包括定时中断的设计、多模块协同控制策略以及系统调试方法。下一章将整合所有模块,提供完整的项目代码与硬件设计资料,帮助读者完成系统部署与功能验证。
5. 项目整合与资源发布
5.1 项目软硬件整合流程
在完成各功能模块的独立开发与测试后,需将实时时钟、温度传感、LCD显示及中断控制等子系统进行统一整合。整个整合过程遵循“自底向上”的集成策略,确保每一层接口稳定后再进行上层调用。
首先,确认主控MCU(如STM32F103C8T6或STC89C52)的外设资源配置无冲突。例如:
- RTC模块 使用I2C1接口(SCL: PB6, SDA: PB7)
- DS18B20 挂载于PA0引脚,采用单总线协议
- LCD12864 通过SPI2通信(SCK: PB13, MOSI: PB15, CS: PB12)
- 定时器TIM2配置为1秒中断,用于更新时间与刷新显示
// main.c 中的系统初始化顺序
int main(void) {
SystemInit();
// 外设初始化(顺序关键)
USART1_Init(); // 调试日志输出
I2C1_Init(); // DS3231 RTC 初始化
OneWire_Init(GPIOA, 0); // DS18B20 初始化
LCD12864_Init(); // 显示屏初始化
RTC_Init(); // 获取当前时间
TIM2_Init(1000); // 1ms定时中断,触发时间调度
while (1) {
// 主循环仅处理非实时任务
if (display_update_flag) {
LCD12864_Refresh();
display_update_flag = 0;
}
}
}
上述代码体现了 初始化依赖关系管理 :串口优先启用以便调试;外设驱动加载完毕后再启动中断系统,避免中断中调用未初始化函数导致崩溃。
5.2 完整项目代码结构与资源组织
为提升项目的可维护性与协作效率,推荐采用标准化的工程目录结构:
| 目录/文件 | 功能说明 |
|---|---|
/Core |
MCU核心代码(startup, system_stm32f1xx.c) |
/Drivers/RTC |
DS3231驱动,含i2c_rw.c/h |
/Drivers/TEMP |
DS18B20单总线实现,支持CRC校验 |
/Drivers/LCD |
LCD12864图形库,支持汉字字模 |
/Middlewares/Calendar |
万年历算法引擎 |
/Inc |
所有头文件集中管理 |
/Src |
应用层源码(main.c, tim_handler.c) |
project.sch |
原理图文件(Altium Designer格式) |
project.pcb |
PCB布局设计,支持自动布线 |
firmware.bin |
编译生成的固件镜像 |
此外,提供如下关键参数配置表,便于移植到不同平台:
| 参数项 | 默认值 | 可配置范围 | 用途 |
|---|---|---|---|
| DISPLAY_REFRESH_MS | 200 | 100~1000 | 屏幕刷新频率 |
| TEMP_SAMPLE_INTERVAL | 2000 | 1000~60000 | 温度采样周期(毫秒) |
| RTC_CORRECTION_PPM | ±2 | -10~+10 | 时钟精度微调 |
| ALARM_HIGH_TEMP | 35.0°C | 30.0~50.0 | 高温报警阈值 |
| FONT_ZH_ENABLE | 1 | 0/1 | 是否启用中文字符集 |
| BACKLIGHT_AUTO_OFF | 30000 | 10000~600000 | 背光自动关闭时间 |
5.3 PCB设计建议与硬件部署指南
针对本项目实际部署需求,提出以下PCB设计优化建议:
graph TD
A[电源输入 5V] --> B[LDO稳压至3.3V]
B --> C[STM32主控芯片]
C --> D[DS3231 RTC 实时时钟]
C --> E[DS18B20 温度传感器]
C --> F[LCD12864 液晶屏]
D --> G[纽扣电池备份电路]
F --> H[背光限流电阻 220Ω]
E --> I[上拉电阻 4.7kΩ]
C --> J[SWD下载接口]
该拓扑图展示了信号流向与供电逻辑。具体布线注意事项包括:
- 高频走线短而直 :I2C总线长度应小于10cm,必要时加入20pF滤波电容;
- 模拟地与数字地分离 :在靠近LDO处单点连接,减少噪声干扰;
- 热敏元件远离发热源 :DS18B20应远离MCU和电源模块;
- 丝印标注清晰 :引出所有GPIO供后续扩展(如Wi-Fi模块预留焊盘);
- 增加测试点 :在SCL、SDA、ONE_WIRE线上设置测试焊盘,方便示波器抓波形。
最终PCB尺寸建议控制在60mm × 40mm以内,适配标准面包板或外壳安装。
5.4 扩展功能开发思路与云平台对接方案
为进一步拓展项目应用场景,可引入以下增强功能:
Wi-Fi数据上传(ESP-01S模块接入)
通过UART2连接ESP-01S(AT指令模式),实现温度与时间数据上传至阿里云IoT平台。
// 发送数据到ESP8266示例
void SendToCloud(float temp, uint8_t hour, uint8_t min) {
char buf[64];
sprintf(buf, "AT+CMGF=1\r\n"); // 设置文本模式
HAL_UART_Transmit(&huart2, (uint8_t*)buf, strlen(buf), 100);
sprintf(buf, "POST /sensor HTTP/1.1\r\nHost: api.iot.cn-shanghai.aliyuncs.com\r\n");
strcat(buf, "Content-Type: application/json\r\n");
char json[32];
sprintf(json, "{\"temp\":%.1f,\"time\":\"%02d:%02d\"}", temp, hour, min);
strcat(buf, json);
HAL_UART_Transmit(&huart2, (uint8_t*)buf, strlen(buf), 500);
}
触摸屏交互升级
替换LCD12864为带触摸的TFT屏(如ILI9341 + XPT2046),实现界面翻页与阈值调节:
if (TP_TouchPressed()) {
int x, y;
TP_GetXY(&x, &y);
if (y < 80) {
current_page = (current_page + 1) % 3; // 页面切换
} else if (y > 200 && temp_alarm_set_mode) {
alarm_temp += (x > 160) ? 0.5 : -0.5; // 触控增减报警值
}
}
这些扩展不仅提升了系统的智能化水平,也为后续产品化提供了坚实基础。
简介:该项目“万年历+温度+LCD12864程序”是一个典型的嵌入式系统实践,集成了实时时钟(RTC)用于万年历功能、温度传感器实现环境温度监测,并通过LCD12864液晶屏进行信息可视化。项目包含RTC初始化、温度采集、LCD驱动及数据显示等模块,适用于Arduino、AVR或STM32等微控制器平台。配套完整代码和电路设计,适合嵌入式初学者进行学习与实操,掌握嵌入式系统软硬件协同开发的核心技能。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 21
21 0
0- 0



 已为社区贡献309条内容
已为社区贡献309条内容

所有评论(0)