
单片机|物联网|毕设答辩|毕业设计项目|毕设设计|—基于STM32单片机的纱管图像识别系统设计
摘要:本文设计了一种基于STM32单片机的纱管图像识别系统,采用OV系列摄像头采集图像,通过DCMI接口传输至STM32处理器。系统硬件包含SDRAM存储、LCD显示及照明模块,软件采用分层结构实现图像采集、预处理、特征提取和识别决策。针对STM32资源限制,重点优化了图像处理算法,提出灰度化、二值化等简化处理方法,并探讨了模板匹配和轻量级机器学习两种识别方案。系统实现了纱管颜色、型号和缺陷的实时

标题:基于STM32单片机的纱管图像识别系统设计
系统总体概述
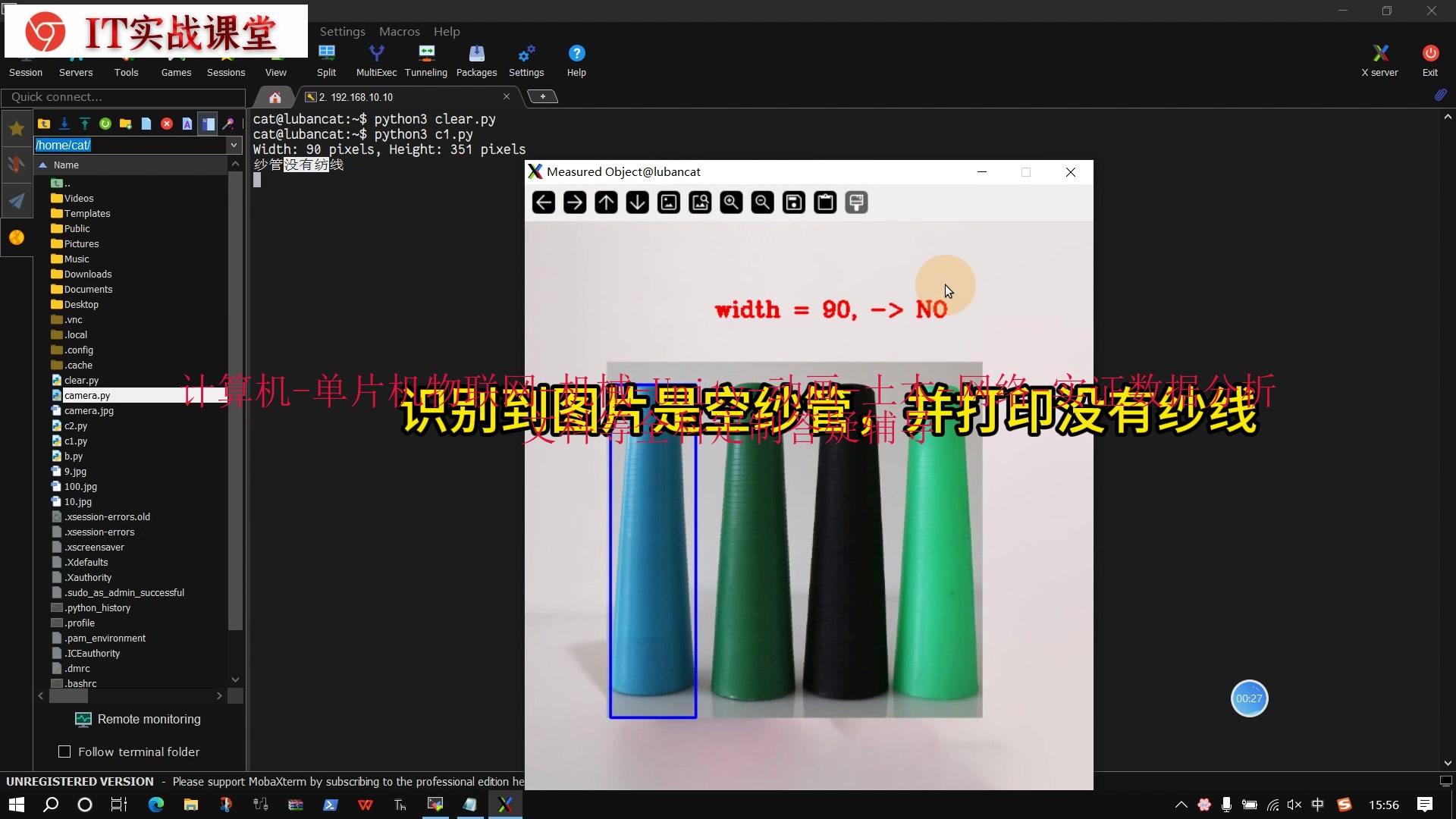
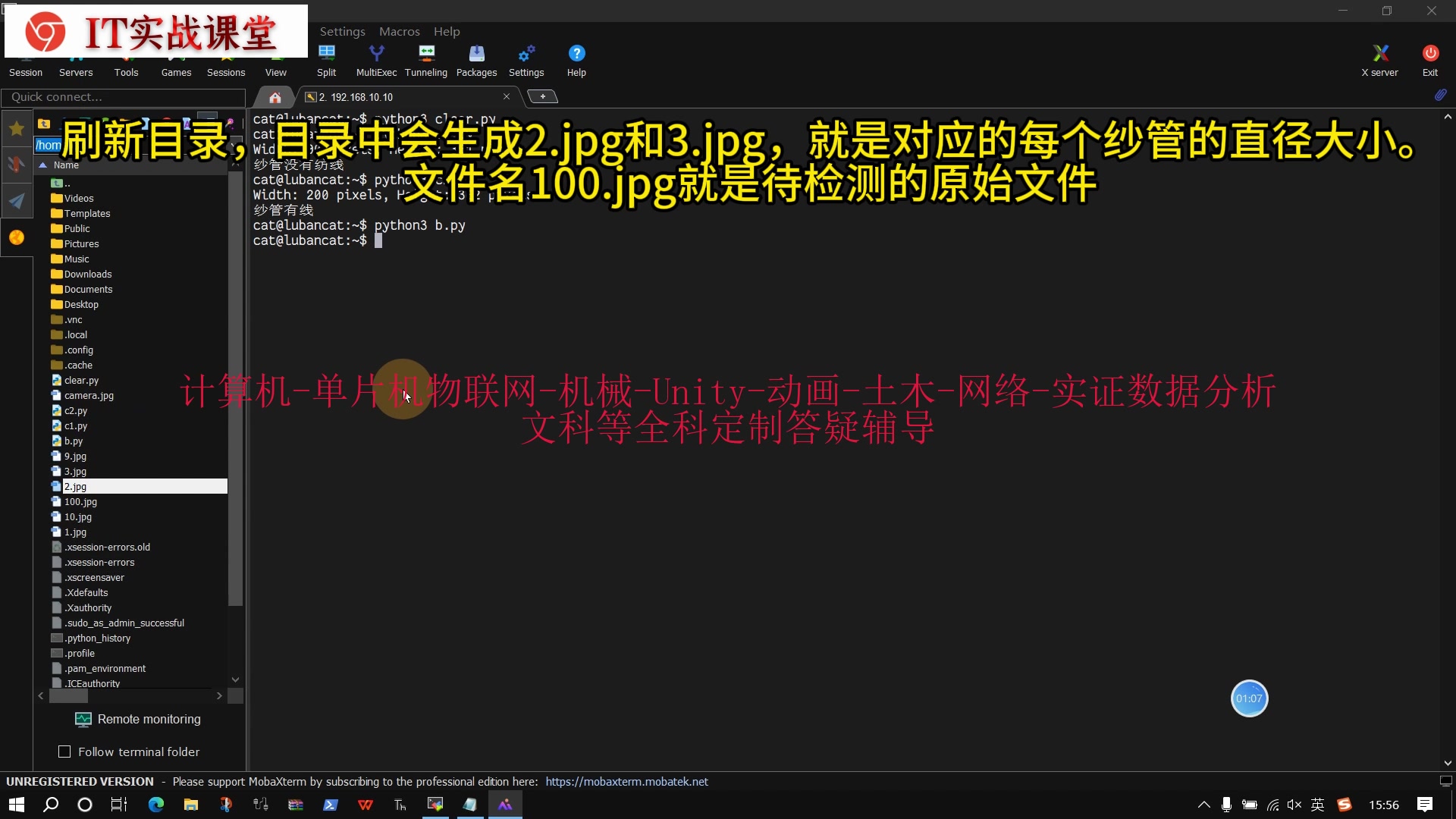
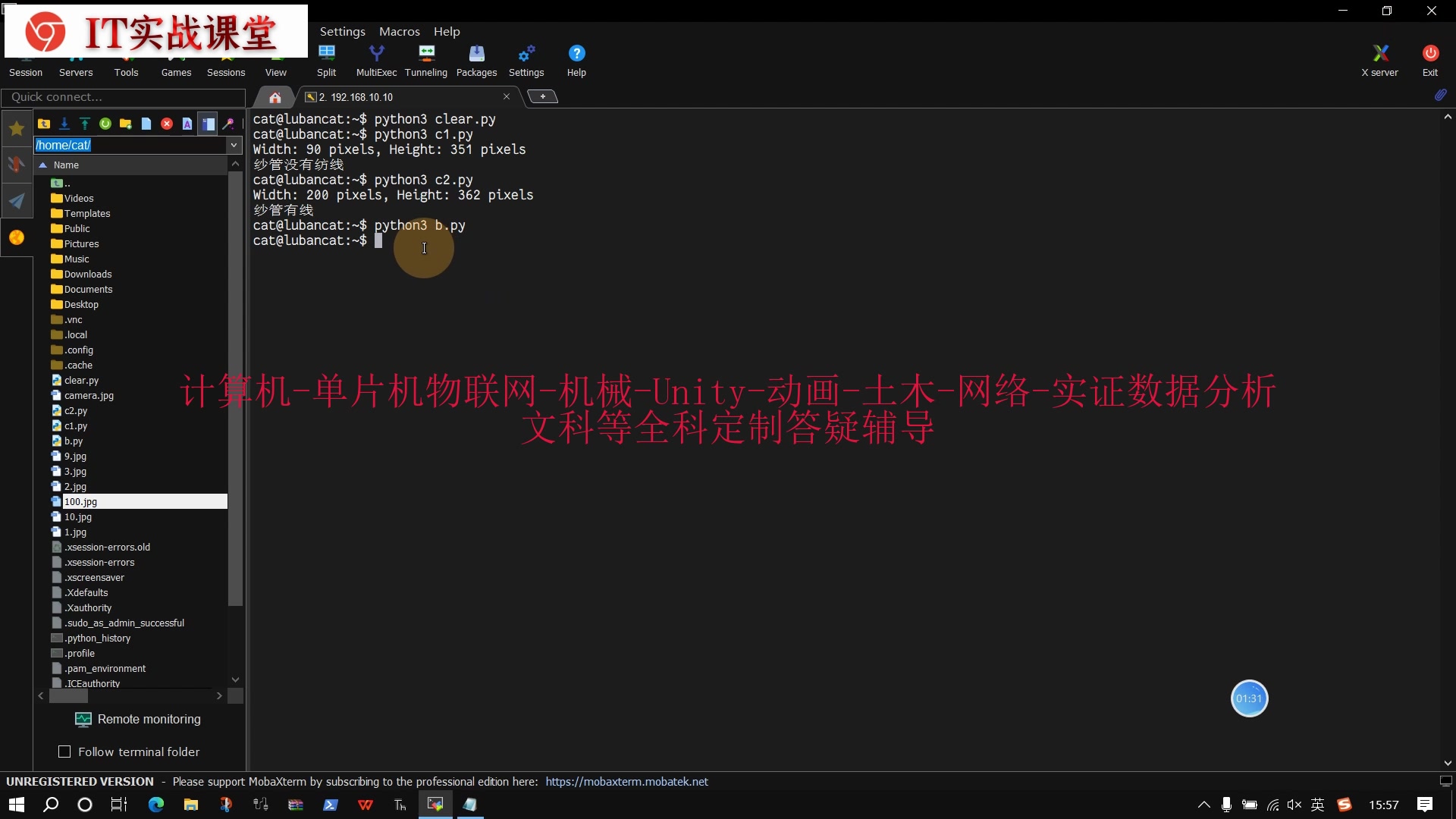
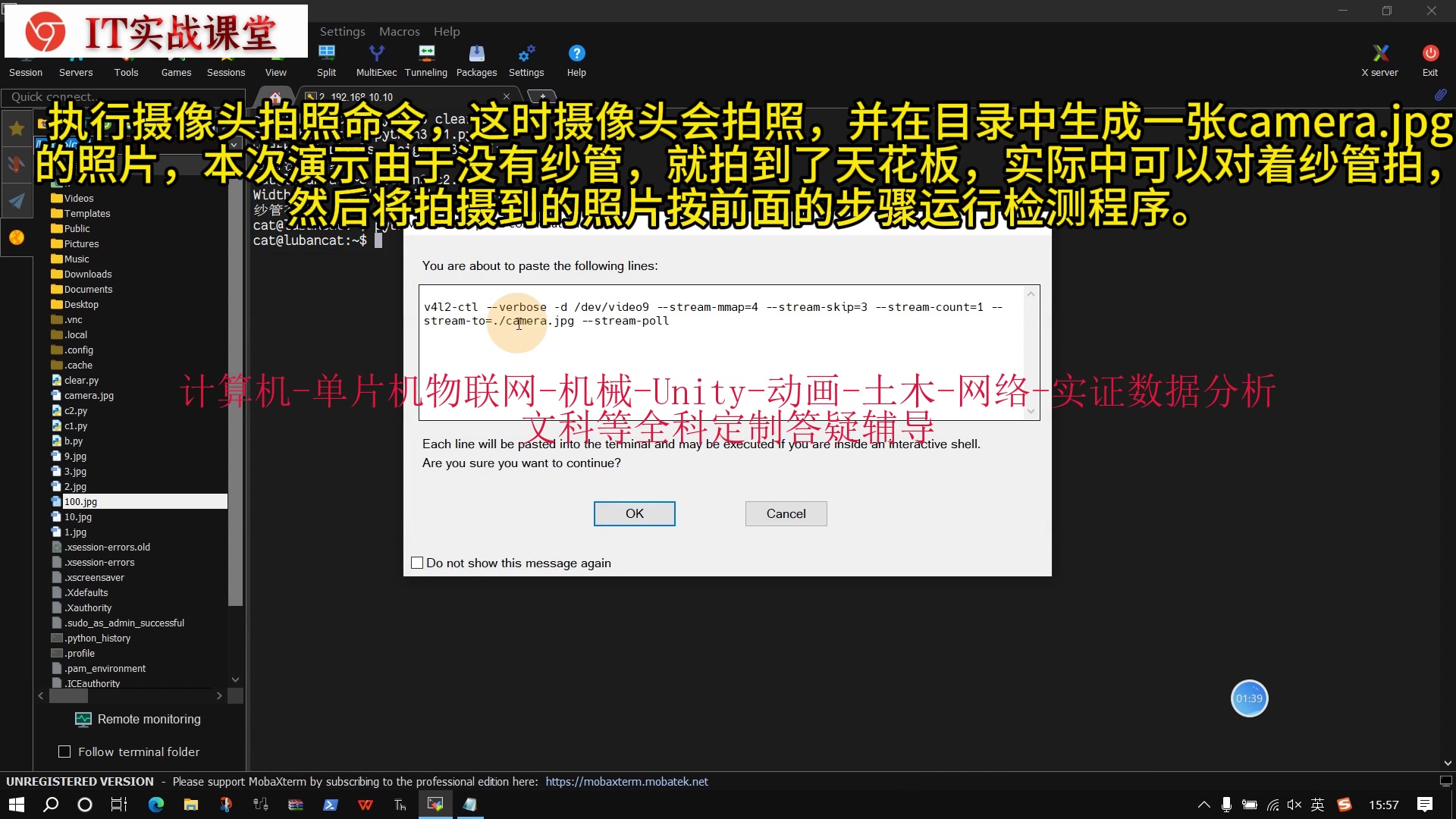
该系统旨在通过摄像头采集纱管图像,利用STM32进行实时处理,识别纱管的颜色、型号或是否存在缺陷,并输出结果。
其核心架构如下图所示:
text
[图像采集] -> [图像预处理] -> [特征提取] -> [识别与决策] -> [结果输出] | | | | | [摄像头] (在STM32上运行) (在STM32上运行) (在STM32上运行) [显示屏/通信]
第一部分:硬件系统设计
1. 核心控制器 (MCU)
-
推荐型号:STM32H7系列 (如STM32H743/750) 或 STM32F4系列 (如STM32F407/F429)。
-
关键要求:
-
高性能:需高主频(>200MHz),带DSP指令集和FPU(浮点单元),用于加速图像算法。
-
大内存:需大量SRAM(>256KB)存放图像缓冲区,STM32F429/STM32H7还集成SDRAM控制器,可外接SDRAM存储完整图像。
-
DCMI接口:数字摄像头接口,用于高速接收摄像头数据,是必备外设。
-
LCD-TFT控制器:用于驱动显示屏实时显示图像和结果。
-
-
2. 图像传感器模块
-
OV系列摄像头(最佳选择):
-
OV7670:30万像素,性价比高,需外部FIFO芯片(如AL422B)缓存图像,因为其不带FIFO,数据输出快,STM32无法直接读取。
-
OV2640:200万像素,自带JPEG压缩引擎,可输出压缩后的JPEG图像,极大减轻总线压力和存储需求,强烈推荐。
-
OV5640:500万像素,性能更强,支持自动对焦,接口更复杂。
-
-
接口:均通过DCMI并行接口与STM32连接。
3. 存储设备
-
外置SDRAM(如IS42S16400J):用于缓存一帧或多帧原始图像数据。对于VGA(640x480)图像,一帧RGB565图像就需要600KB空间,片内RAM远不够用。
-
MicroSD卡:用于存储算法参数、模板图像或记录识别结果。
4. 显示与交互
-
LCD显示屏:3.5寸或4.3寸TFT-LCD,带电阻/电容触摸屏,用于实时显示捕捉到的图像、识别结果和设置参数。
-
按键/旋钮:用于触发采集、选择模式等。
5. 通信接口(可选)
-
USART/UART:连接PC端进行调试,输出识别结果。
-
Ethernet或Wi-Fi模块:将识别结果上传到服务器或云端(MQTT协议)。
6. 照明系统(极其重要)
-
LED光源:设计均匀的照明环境,消除阴影和反光,保证图像采集的稳定性和一致性。这是影响识别精度的关键外部因素。
第二部分:软件系统设计(固件程序)
软件设计应采用分层结构,核心是图像处理算法。
1. 驱动层
-
DCMI驱动:配置摄像头接口,接收图像数据并存入SDRAM。
-
SDRAM驱动:初始化并测试外置SDRAM,提供图像存储池。
-
LCD驱动:初始化显示屏,实现画点、画线、显示图片和字符函数。
-
摄像头驱动(SCCB/I2C):初始化OV系列传感器,设置分辨率、输出格式、曝光、白平衡等参数。
2. 图像处理算法层(核心)
在STM32上实现算法必须考虑效率和资源,通常使用灰度图像进行处理以减少计算量。
-
图像预处理:
-
分辨率缩放:将图像缩小到合适尺寸(如QVGA),大幅减少运算量。
-
灰度化:将RGB图像转换为灰度图像。
Gray = R*0.299 + G*0.587 + B*0.114(可用移位近似避免浮点)。 -
滤波去噪:使用中值滤波去除椒盐噪声,或高斯滤波平滑图像。
-
-
图像分割:
-
二值化:通过设定一个阈值,将灰度图像转为黑白图像,分离前景(纱管)和背景。阈值可通过OTSU(大津法) 自动计算。
-
边缘检测:使用Sobel、Canny等算子提取纱管的轮廓。
-
-
特征提取:
-
颜色特征:在原始RGB图像的ROI区域内,统计纱管的平均色度。
-
形状特征:基于二值化后的轮廓,计算Hu矩、周长、面积、圆形度等不变矩特征。
-
纹理特征(较难):如果需要识别毛絮等缺陷,可以考虑计算局部的LBP(局部二值模式) 特征。
-
3. 识别决策层
-
模板匹配法:适用于识别固定型号的纱管。预先存储一个标准纱管模板(二值轮廓或灰度),计算当前图像与模板的相关系数或差异度。
-
机器学习法(在STM32上部署轻量级模型):
-
在PC上训练一个支持向量机或决策树模型,将提取的特征向量输入模型进行分类。
-
CNN推理:使用STM32Cube.AI等工具,将训练好的轻量级CNN模型(如MobileNet, SqueezeNet)部署到STM32上,直接进行端到端的识别。这是更先进但更复杂的方法。
-
4. 应用层
-
主状态机:控制整个系统流程(初始化 -> 等待触发 -> 采集图像 -> 处理 -> 识别 -> 显示结果)。
-
人机交互:处理触摸屏和按键事件,更新UI界面。
第三部分:系统工作流程
c
int main(void) {
// 硬件初始化
HAL_Init();
SystemClock_Config();
MX_DCMI_Init();
MX_SDRAM_Init();
MX_LCD_Init();
MX_OV2640_Init(); // 通过I2C配置摄像头
// ...其他初始化
while (1) {
// 1. 等待触发信号(如按键按下)
if(Trigger_Capture()) {
// 2. 执行一次图像采集 (通过DCMI将一帧图像存入SDRAM)
CAMERA_StartCapture();
// 3. 图像预处理 (在SDRAM中的图像数据进行处理)
Image_Resize(&img, 320, 240); // 缩放到320x240
Image_Grayscale(&img); // 转为灰度图
Image_Filter_Median(&img); // 中值滤波
// 4. 图像分割与特征提取
threshold = OTSU_GetThreshold(&img); // 大津法求阈值
Image_Binarization(&img, threshold); // 二值化
Extract_Contour(&img, &contour); // 提取轮廓
Extract_Features(&contour, &features); // 计算特征向量
// 5. 识别与分类
result = Classifier_Predict(&features); // 使用预训练的模型进行分类
// 6. 显示结果
LCD_DrawImage(&img); // 在LCD上显示处理后的图像
LCD_Show_Result(result); // 显示识别结果(如"红色纱管 - OK")
}
}
}
关键挑战与注意事项
-
性能瓶颈:图像处理极其消耗资源。必须优化算法:
-
使用STM32的DSP库进行加速。
-
减少浮点运算,多用定点数(Q格式)。
-
合理选择处理区域(ROI),而不是处理整幅图像。
-
-
光照稳定性:环境光的变化会严重影响二值化和颜色判断。解决方案:
-
硬件上:搭建封闭的照明环境,使用均匀的LED光源。
-
软件上:采用自适应阈值算法,或进行白平衡和色彩校正。
-
-
算法复杂度与精度权衡:在STM32上无法运行像OpenCV那样复杂的算法。需要在识别精度和实时性之间找到平衡点。
-
模型训练与部署:如果使用机器学习方法,需要在PC上完成特征提取和模型训练,然后将模型参数(如权重、阈值)集成到STM32的代码中。
代码实现:

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)