
深入掌握S3C2440 UART编程实战指南
S3C2440是三星公司生产的一款高性能、低功耗的基于ARM920T核心的32位RISC微处理器。广泛应用于手持设备、移动电话等便携式设备。它集成了丰富的外设接口,如LCD控制器、USB主机和设备接口等,能够支持多种操作系统和应用软件。ADS为开发者提供了强大的集成开发环境(IDE),它集成了文本编辑器、编译器、链接器、调试器和性能分析工具。对于S3C2440这样的嵌入式系统开发,ADS不仅提供了

简介:S3C2440是一款广泛应用于嵌入式系统的ARM9微处理器,内置UART接口用于实现串行通信。本例程提供了详细的UART配置与使用指导,包括设置波特率、数据位、停止位及奇偶校验等参数,适用于初学者和开发者。在ADS开发环境下,例程包含初始化、数据传输、中断处理等关键步骤,附带详细的注释说明。通过学习本例程,开发者将能够高效地实现远程控制、日志记录和传感器网络等项目中的串行数据通信。 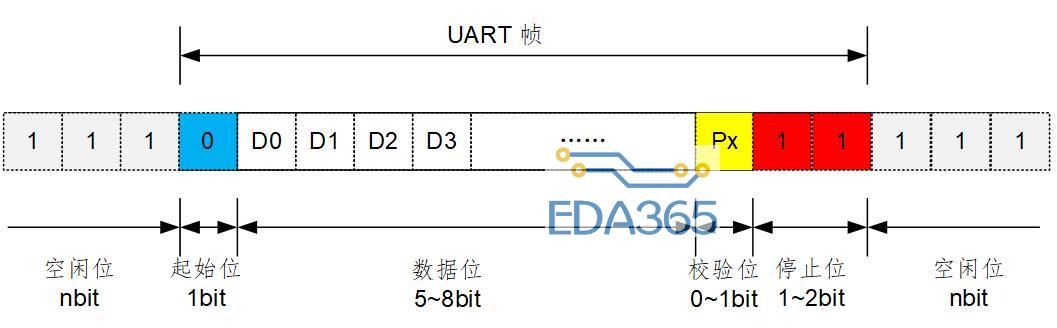
1. S3C2440微处理器简介
1.1 S3C2440概述
S3C2440是三星公司生产的一款高性能、低功耗的基于ARM920T核心的32位RISC微处理器。广泛应用于手持设备、移动电话等便携式设备。它集成了丰富的外设接口,如LCD控制器、USB主机和设备接口等,能够支持多种操作系统和应用软件。
1.2 S3C2440的特点
该微处理器支持高达400MHz的主频,并具备16KB指令Cache和16KB数据Cache,以减少内存访问延迟。S3C2440的灵活性和扩展性使其能够满足多样化的应用需求,同时它还包括了多种电源管理功能,有效延长了移动设备的电池使用寿命。
1.3 S3C2440在嵌入式领域的应用
S3C2440因其强大的性能和丰富的接口,成为了嵌入式开发者理想的开发平台。它经常被用于开发诸如智能手机、PDA、GPS导航仪、平板电脑等消费电子产品。此外,S3C2440还被应用于工业控制、医疗设备等专业领域中。
2. UART串行通信基础
2.1 UART通信原理
2.1.1 UART通信的概念及特点
UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)是一种广泛使用的串行通信标准。它允许计算机或其他设备通过单个数据线,以异步的方式进行双向数据传输。UART通信的特点在于其简单性,它不需要严格的时钟同步机制,因此可以在不同的设备间提供一种方便的通信方式。UART数据传输是通过”开始位-数据位-校验位-停止位”的格式进行的,这种格式提供了错误检测和同步的能力。
2.1.2 UART通信的数据格式
UART数据格式的配置包括数据位数、校验位和停止位。常见的数据位数为5、6、7或8位;校验位可以选择奇校验、偶校验或无校验;停止位可以是1位、1.5位或2位。通过这些参数的组合,可以灵活地适应不同的应用需求。例如,一个典型的配置是8位数据位、无校验位和1位停止位。
2.2 UART通信的物理接口
2.2.1 串行通信的硬件连接方式
串行通信的硬件连接通常包括至少三根线:RX(接收)、TX(发送)和GND(地线)。为了实现全双工通信,设备之间还需要交换RX和TX线。在某些情况下,还会加入RTS(请求发送)和CTS(清除发送)等硬件流控制信号线,以防止数据溢出。
2.2.2 信号线的电气特性
UART信号线通常采用TTL(Transistor-Transistor Logic)或CMOS(Complementary Metal-Oxide-Semiconductor)电平标准。TTL信号标准的逻辑”1”电平约为5V,逻辑”0”约为0V。CMOS信号标准的逻辑电平范围更广,逻辑”1”和”0”分别接近Vcc和0V。信号的电气特性决定了其传输距离和抗干扰能力。
2.3 UART通信的软件架构
2.3.1 串口通信协议栈
串口通信协议栈可以包含多层,从硬件层到应用层。最底层是物理硬件,然后是驱动程序,接着是可能存在的中间件层,最终到达应用层。在嵌入式设备中,串口通信协议栈通常较为简单,应用层直接与驱动程序交互。
2.3.2 流控制的实现机制
为了有效管理数据流,UART通信中常使用硬件流控制或软件流控制。硬件流控制使用RTS/CTS信号线,软件流控制则通过在数据帧中加入XOFF和XON控制字符来实现。硬件流控制提供了更为可靠的流控制方法,但会增加信号线的复杂性。软件流控制实现简单,但在高速或高误码率的环境下可能存在效率和稳定性问题。
在下一章节中,我们将探讨如何在S3C2440微处理器上配置和初始化UART模块,以实现高效的串行通信。
3. S3C2440 UART配置与初始化
3.1 S3C2440 UART模块结构
3.1.1 UART模块的硬件组成
S3C2440微处理器的UART模块是其重要的组成部分,具有强大的串行通信功能。这一模块包含了用于实现全双工通信的所有必要部件,例如,发送器(Transmitter),接收器(Receiver),波特率发生器(Baud Rate Generator),以及用于实现流控制的线路控制逻辑等。以下是其具体组成部分的分析:
- 发送器(Transmitter) :负责将并行数据转换成串行数据,并通过TXD(发送数据)线输出到外部设备。
- 接收器(Receiver) :负责将从RXD(接收数据)线接收到的串行数据转换回并行数据。
- 波特率发生器 :用于设置UART通信的波特率,确定数据发送和接收的速度。
- 线路控制逻辑 :通过RTS(请求发送)和CTS(清除发送)来控制数据流的启动和停止,实现硬件流控制。
3.1.2 UART模块的寄存器配置
S3C2440 UART模块的寄存器配置是初始化过程中的关键步骤。理解并正确配置寄存器对于UART通信的稳定性和效率至关重要。以下是几个核心寄存器的介绍:
- ULCON(Line Control Register) :用于设置串口通信的数据位数、停止位数和校验位。
- UCON(UART Control Register) :控制流控制模式,以及是否启用内部波特率发生器。
- UBRDIV(Baud Rate Divisor Register) :用于设置波特率,通过编程这个寄存器来设定波特率发生器的分频值。
- UFCON(FIFO Control Register) :配置是否使能接收和发送FIFO(先入先出)缓冲区,以及其触发级别。
配置寄存器通常需要通过访问特定的地址来完成,例如:
ldr r0, =0x14000000 ; S3C2440的UART0基地址
ldr r1, [r0, #ULCON] ; 读取ULCON寄存器当前值
orr r1, #0x03 ; 设置数据位为8位,停止位1位,无校验位
str r1, [r0, #ULCON] ; 将修改后的值写回ULCON寄存器
3.2 UART初始化流程
3.2.1 时钟配置与波特率设定
初始化UART时,首先要确保相关的时钟源已经启用,并配置合适的波特率。波特率的设定影响数据传输的速度,过高或过低都可能导致通信不稳定。
- 时钟配置 :S3C2440通常通过配置其时钟控制寄存器(如PCLKEN和CLKDIVN)来启用UART模块的时钟源。
- 波特率设定 :波特率的设定基于系统时钟频率和波特率发生器的分频值。公式为:波特率 = 系统时钟频率 / (16 * (UBRDIV + 1))。
代码示例:
ldr r0, =0x14000000 ; S3C2440的UART0基地址
mov r1, #0x00 ; 清除r1寄存器
orr r1, #(1 << 1) ; 使能 UART0的时钟源
str r1, [r0, #PCLKEN] ; 写入PCLKEN寄存器
; 波特率设定
mov r1, #0x00 ; 清除r1寄存器
orr r1, #(0x5 << 0) ; 设置UBRDIV为5,波特率 = 12MHz / (16 * (5 + 1)) = 125k
str r1, [r0, #UBRDIV] ; 写入UBRDIV寄存器
3.2.2 中断使能与工作模式选择
在UART配置的后续步骤中,需要设置中断使能寄存器,以允许在数据接收或发送完成时触发中断。同时,选择合适的工作模式对于优化通信性能也非常关键。
- 中断使能 :通过配置UART模块的中断使能寄存器(如UIRQR和UIER)来设置哪些中断事件能够触发中断服务程序。
- 工作模式选择 :根据应用场景选择模式,如正常模式、流控制模式等,并相应配置UCON寄存器。
代码示例:
; 中断使能
mov r1, #0x00 ; 清除r1寄存器
orr r1, #(1 << 3) ; 使能接收缓冲区满中断
str r1, [r0, #UIRQR] ; 写入UIRQR寄存器
; 工作模式选择
orr r1, #0x01 ; 选择工作模式1,无流控制
str r1, [r0, #UCON] ; 写入UCON寄存器
以上是对S3C2440 UART配置与初始化的详细讨论。通过精确配置UART模块的硬件组成和寄存器,以及合理设置时钟、波特率、中断和工作模式,我们可以为后续的通信任务打下坚实的基础。这一步骤是保证通信质量的关键,必须遵循正确的步骤和细节,才能确保串行通信的顺利进行。
4. 数据传输及中断处理
4.1 数据传输机制
4.1.1 发送数据的流程与实现
在嵌入式系统中,数据传输是通信的关键。UART的发送数据流程通常涉及到数据的组织、缓冲和最终发送。在本部分,我们将讨论在S3C2440微处理器上实现数据发送的步骤。
首先,数据被写入UART的发送缓冲区(UTXH),然后,发送器开始将数据的每一位通过TXD线串行发送出去。为了确保数据正确地发送,UART模块使用了起始位和停止位对数据包进行封装。在起始位之后,数据字节按低位到高位的顺序发送,最后是停止位。在每个数据包之后,可以有可选的奇偶校验位。
在代码层面,以下是通过S3C2440的UART发送一个字节数据的示例代码:
#define UART_BASE 0x50000000 // 假设的UART基地址
#define UTXH (*(volatile unsigned char *)(UART_BASE + 0x00)) // 发送缓冲寄存器
void uart_send_byte(unsigned char byte) {
// 等待发送缓冲区为空,确保上一个字节已经发送完毕
while (!(UTXH & 0x80)); // 0x80是假设的缓冲区空标志位
// 将数据写入UTXH寄存器
UTXH = byte;
}
这段代码中,我们使用一个简单的循环来检查UTXH寄存器的最高位是否为1。这一位被设置为1时,表示发送缓冲区为空,可以发送新的数据。当此位为0时,循环继续,直到发送缓冲区为空。
4.1.2 接收数据的流程与实现
在接收数据方面,当UART的RXD线接收到了起始位时,接收器开始同步。接着,数据位按低位到高位顺序接收,校验位(如果有的话)被处理,最后接收停止位。所有这些比特的接收都应在指定的时间间隔内完成,以避免溢出或数据损坏。
在代码层面,以下是通过S3C2440的UART接收一个字节数据的示例代码:
#define UART_BASE 0x50000000 // 假设的UART基地址
#define URXH (*(volatile unsigned char *)(UART_BASE + 0x04)) // 接收缓冲寄存器
#define UCON (*(volatile unsigned int *)(UART_BASE + 0x20)) // 控制寄存器
unsigned char uart_receive_byte(void) {
// 等待接收到数据,URXH寄存器中有效数据的标志位为0x01
while (!(URXH & 0x01));
// 从URXH寄存器中读取接收到的数据字节
return URXH;
}
在此代码中,我们同样使用一个循环来检查URXH寄存器的最低位是否为1。这一位被设置为1时,表示接收缓冲区中有了新的数据。
4.2 中断管理
4.2.1 中断向量与优先级配置
当中断发生时,处理器需要根据中断向量表来确定中断服务例程(ISR)的地址。在S3C2440中,中断向量由中断向量寄存器(INT Vector Register)和中断优先级寄存器(IRQ Priority Register)控制。
中断优先级的设置在多中断环境中显得尤为重要,它确保了中断请求的处理顺序,从而优化了系统的响应效率。下面的代码展示了如何设置UART中断向量和优先级:
#define INTC_BASE 0x4A000000 // 假设的中断控制器基地址
#define INTMOD (*(volatile unsigned int *)(INTC_BASE + 0x04)) // 中断模式寄存器
#define INTPND (*(volatile unsigned int *)(INTC_BASE + 0x10)) // 中断挂起寄存器
#define INTMSK (*(volatile unsigned int *)(INTC_BASE + 0x14)) // 中断屏蔽寄存器
#define INTSUBMSK (*(volatile unsigned int *)(INTC_BASE + 0x18)) // 中断子屏蔽寄存器
void uart_set_interrupt_vector(unsigned int vector) {
INTMOD |= (vector << 8); // 设置中断模式,例如向量中断模式
}
void uart_enable_interrupt(void) {
INTMSK &= ~(1 << UART_INTERRUPT); // 允许UART中断
INTPND &= ~(1 << UART_INTERRUPT); // 清除挂起的UART中断
}
void uart_disable_interrupt(void) {
INTMSK |= (1 << UART_INTERRUPT); // 禁止UART中断
}
在这段代码中, INTMOD 寄存器用于设置中断模式, INTMSK 寄存器用于启用或禁用中断,而 INTPND 用于清除中断挂起。 UART_INTERRUPT 是一个假设的宏定义,代表UART中断的向量号。
4.2.2 中断服务程序的设计
当中断发生时,处理器需要调用相应的中断服务程序(ISR)。设计一个高效的ISR,需要考虑以下因素:
- 尽量减少ISR的执行时间,仅进行必要的处理。
- 使用信号量或其他机制,通知接收任务数据的到来。
- 在ISR中禁止中断嵌套,或定义特定的临界区。
以下是一个示例,展示了如何为UART中断编写服务程序:
void uart_isr(void) {
unsigned char data;
// 确认是UART中断
if (INTPND & (1 << UART_INTERRUPT)) {
// 读取接收数据
data = uart_receive_byte();
// 将数据发送到缓冲区或处理
enqueue_data(data);
// 清除中断挂起
INTPND |= (1 << UART_INTERRUPT);
}
}
在此代码中, enqueue_data 是一个假设的函数,负责将接收到的数据放入队列,以便在中断之外的线程中进一步处理。
为了响应ISR中的数据接收,可以使用操作系统提供的同步机制,如信号量或消息队列。这样,即使在ISR中不直接处理数据,接收任务也可以在ISR完成后迅速得知有新数据可用。
5. ADS开发环境使用
ADS(ARM Developer Suite)是ARM公司推出的一套完整的嵌入式软件开发工具,它支持所有ARM处理器的开发,包括S3C2440等。ADS为开发者提供了一套完整的开发、调试和分析工具,这使得开发人员可以更高效地进行应用程序的开发和性能优化。
5.1 ADS开发环境概述
ADS为开发者提供了强大的集成开发环境(IDE),它集成了文本编辑器、编译器、链接器、调试器和性能分析工具。对于S3C2440这样的嵌入式系统开发,ADS不仅提供了一个良好的开发基础,还提供了针对性的调试和优化工具,这对于提升开发效率和软件质量至关重要。
5.1.1 ADS环境的安装与配置
ADS的安装流程一般包括下载安装包、同意许可协议、选择安装路径、安装组件以及最后确认安装成功等步骤。安装完成后,需要对环境变量进行配置,这样在命令行中就可以直接调用ADS工具了。配置环境变量通常涉及到更新系统的PATH变量,包括ARM处理器的工具链路径和库文件路径。
5.1.2 ADS中的编译与调试工具
在ADS中,编译工具链包含了ARM汇编器(armasm)、C/C++编译器(armcc/armlink)以及库管理器(armlib)。这些工具共同构成了编译器前端和后端,支持完整的程序开发流程。调试工具方面,ADS提供了调试器(armsd),它支持源代码级调试,也能够直接对处理器寄存器进行读写操作,为开发者提供了一个接近硬件级别的调试体验。
5.2 程序开发流程
ADS环境下的程序开发流程可以分为几个主要阶段,从代码编写、编译、链接、加载到调试和分析性能。每个阶段都有对应的工具来支持,确保开发者能够集中精力编写高质量的代码,而非被繁琐的配置和工具使用问题困扰。
5.2.1 程序结构的设计
在编写程序之前,开发者需要对整个程序的结构有一个清晰的设计。在ADS环境下,通常会使用项目管理器(如project manager)来创建项目,并将源代码、头文件、库文件等组织起来。ADS支持C/C++和汇编语言的混合编程,开发者可以根据需要灵活选择。
5.2.2 调试过程中的常见问题及解决方法
在使用ADS进行程序调试时,开发者可能会遇到各种问题,如断点无法命中、变量值显示错误、程序异常终止等。ADS调试器(armsd)提供了丰富的调试命令和选项,比如可以设置条件断点、观察变量的值、单步执行等,帮助开发者定位和解决这些问题。此外,ADS还提供了性能分析工具(apcs)来分析程序运行时的性能瓶颈,这对于优化程序的执行效率非常有帮助。
下面是一个简单的ADS调试器使用示例:
armcc hello.c -o hello.axf
armdb hello.axf
armcc是ARM C编译器,用于将C源代码编译成ARM可执行文件。hello.c是要编译的源代码文件。-o hello.axf指定输出文件名为hello.axf。armdb是ADS调试器,用于加载编译好的程序进行调试。
通过上述步骤,开发者可以开始对 hello.axf 进行调试。ADS调试器具备强大的命令行功能,可以通过输入各种命令来控制程序的执行和检查程序状态。在实际的调试过程中,开发者可以根据自己的需求,灵活地使用调试器的各种功能来发现和解决问题。
在了解了ADS开发环境的安装配置、使用方法以及程序开发流程之后,开发者应当能够更加高效地使用ADS环境进行嵌入式系统的软件开发工作。接下来的章节将深入探讨如何在ADS中编写和解析例程代码,进而使开发者更深入地理解编程实践和代码优化技巧。
6. 例程代码注释与解析
6.1 代码结构与实现逻辑
6.1.1 代码组织结构
在着手编写和解析例程代码之前,理解代码的组织结构至关重要。对于S3C2440这样的微处理器,例程通常遵循一种清晰的层次结构,将不同的功能和模块化地组织起来。通常,代码可以划分为初始化模块、数据处理模块和中断服务模块。初始化模块负责配置UART的工作环境,包括设置波特率、工作模式等。数据处理模块则关注数据的发送和接收逻辑,而中断服务模块则处理由UART模块触发的中断请求。
6.1.2 主要功能模块的实现原理
对于UART通信的实现,每个模块的功能原理需仔细分析。初始化模块通常依赖于微处理器的寄存器配置来设置UART的工作参数。数据处理模块依赖于寄存器操作来实现数据的串行传输,并利用缓冲机制来提高传输效率。中断服务模块则利用中断机制,通过编写中断服务例程(ISR)响应UART的中断请求,从而实现对数据接收和发送过程的控制。
6.2 代码详细解析
6.2.1 关键代码段的注释
在编写代码时,针对每个关键步骤,都应该加入注释来解释其功能和作用,以利于后续的维护和问题排查。例如,设置波特率的代码段可能包括对相关寄存器的写操作,这时候就应该用注释明确指出这些操作的目的和意义。
/* 设置波特率 */
#define UART_BAUDRATE 9600
/*
* 计算波特率分频值,通常根据系统时钟频率和所需的波特率来计算。
* 下面的宏定义是计算分频值的一种简单示例。
*/
#define CALC_BAUDRATE_DIVISOR(system_clk) \
((system_clk / (UART_BAUDRATE * 16)) - 1)
// 写入波特率分频值到相关寄存器
unsigned int divisor = CALC_BAUDRATE_DIVISOR(SYSTEM_CLOCK_FREQUENCY);
UART_BRD_REG = (UART_BRD_REG & ~BAUDRATE_DIVISOR_MASK) | (divisor & BAUDRATE_DIVISOR_MASK);
6.2.2 代码优化与改进方向
在代码解析的过程中,应当考虑代码的性能和可读性。例如,为了提高性能,可以减少不必要的寄存器操作,优化循环结构,或是在中断服务例程中尽量减少处理时间。为了增强代码的可读性,合理命名变量、使用宏定义来代替硬编码值,并保持代码的一致性和风格统一性是重要的。
// 优化前:硬编码的值
if (UART_REG & UART_RX_FLAG) {
data = UART_DATA_REG;
}
// 优化后:使用宏定义
#define IS_RX_READY(UART_REG) ((UART_REG & UART_RX_FLAG) != 0)
#define READ_UART_DATA(UART_REG) (UART_REG & UART_DATA_MASK)
if (IS_RX_READY(UART_REG)) {
data = READ_UART_DATA(UART_DATA_REG);
}
通过上面的步骤,不仅提高了代码的可维护性,同时也使得代码更加符合嵌入式编程的规范,为后续可能的扩展和优化提供了便利。在实际的代码实现中,还需要根据具体的需求和环境来不断地进行调整和优化。
在阅读和理解了以上内容之后,我们已经对第六章关于例程代码注释与解析有了更为深入的了解。接下来,第七章将详细介绍UART接收功能的实现,包括接收数据的机制和缓冲管理,为深入应用打下坚实的基础。
简介:S3C2440是一款广泛应用于嵌入式系统的ARM9微处理器,内置UART接口用于实现串行通信。本例程提供了详细的UART配置与使用指导,包括设置波特率、数据位、停止位及奇偶校验等参数,适用于初学者和开发者。在ADS开发环境下,例程包含初始化、数据传输、中断处理等关键步骤,附带详细的注释说明。通过学习本例程,开发者将能够高效地实现远程控制、日志记录和传感器网络等项目中的串行数据通信。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 12
12 0
0- 0



 已为社区贡献56条内容
已为社区贡献56条内容

所有评论(0)