
基于AD9954的DDS信号发生器设计与实现
本章详细讲解了如何在单片机平台上为AD9954芯片编写驱动程序,并进一步拓展到基于C++的跨平台开发。我们从SPI接口的初始化、寄存器配置、频率调谐字的计算,到面向对象设计、多线程控制和日志系统的实现,全面覆盖了驱动开发的各个环节。通过本章的学习,开发者不仅可以掌握AD9954的基本控制方法,还能理解如何将嵌入式驱动模块化、可移植化,为后续构建更复杂的系统打下坚实基础。

简介:AD9954是一款高性能直接数字频率合成器(DDS),具备快速频率切换、高分辨率和低相位噪声等特性,广泛应用于通信、测试测量和电子设计大赛等领域。本压缩包包含AD9954的原理图、驱动程序及相关技术文档,适用于开发高精度信号发生器。通过学习和实践,可掌握DDS原理、硬件连接、驱动编程及信号处理技术,适用于频谱分析、调制解调等实际项目开发。 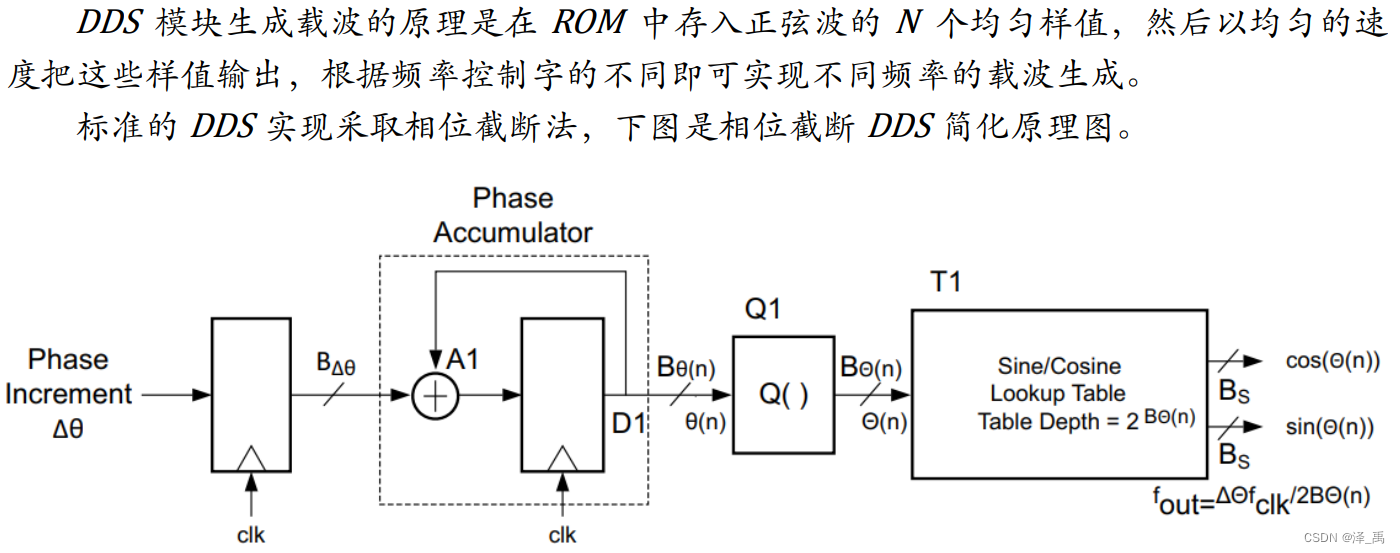
1. DDS信号发生器的基本原理
直接数字频率合成(DDS)技术的基本工作原理
直接数字频率合成(DDS)是一种通过数字方式生成高精度、可编程模拟信号的技术。其核心思想是利用采样定理,在时钟驱动下对数字相位信息进行累加,并通过查找表将相位映射为幅度值,再经由DAC转换为连续模拟信号。该过程实现了频率、相位和幅度均可精确控制的信号输出。
DDS系统的核心组件及其功能
DDS系统主要由四部分构成:相位累加器、相位调谐字(FTW)寄存器、波形查找表(ROM)、数模转换器(DAC)。相位累加器在每个时钟周期累加频率控制字,产生变化的相位地址;该地址用于索引存储正弦波样本的查找表;输出数据送入DAC完成数字到模拟的转换。
频率分辨率、相位累加器与输出信号的关系
频率分辨率为系统最小可调频率间隔,由公式 $ f_{res} = \frac{f_{clk}}{2^N} $ 决定,其中 $ f_{clk} $ 为参考时钟频率,$ N $ 为相位累加器位宽。相位累加器位数越高,频率分辨率越精细。输出信号频率 $ f_{out} = FTW \times \frac{f_{clk}}{2^N} $,表明FTW与输出频率呈线性关系,实现精准调控。
DDS与其他信号生成技术的对比分析
相较于传统的压控振荡器(VCO)或锁相环(PLL)等模拟频率合成技术,DDS具有频率切换速度快、相位连续、分辨率极高(可达μHz级)等优势。同时支持相位和幅度编程,适合复杂调制场景。但其输出带宽受限于奈奎斯特采样定理(通常不超过 $ f_{clk}/2 $),且存在杂散信号与相位噪声问题,需配合滤波与校正算法优化性能。
2. AD9954芯片功能特性详解
AD9954是Analog Devices公司推出的一款高性能直接数字频率合成器(DDS),具备高精度频率合成能力、相位可编程性以及高速数模转换输出功能。它广泛应用于通信、测试测量、雷达、工业控制等领域。本章将从芯片结构、性能指标和应用场景三个方面,深入解析AD9954的功能特性与技术优势。
2.1 AD9954芯片结构与工作原理
AD9954内部集成了完整的DDS架构,包括相位累加器、相位-幅度转换表、高速DAC、寄存器控制模块等。其工作原理基于数字频率合成技术,通过数字方式控制频率和相位输出,具有极高的频率分辨率和相位连续性。
2.1.1 内部寄存器架构与数据路径
AD9954的寄存器架构支持通过SPI接口进行配置,主要寄存器包括频率调谐字寄存器(FTW)、相位控制寄存器、幅度控制寄存器、控制模式寄存器等。
下表为AD9954关键寄存器及其功能:
| 寄存器名称 | 地址偏移 | 位宽 | 功能描述 |
|---|---|---|---|
| 控制寄存器 | 0x00 | 32位 | 设置工作模式、电源状态、频率更新方式 |
| 频率调谐字寄存器(FTW) | 0x04~0x07 | 48位 | 设置输出频率 |
| 相位控制寄存器 | 0x08~0x09 | 48位 | 设置初始相位 |
| 幅度控制寄存器 | 0x0A~0x0B | 12位 | 设置输出信号幅度 |
| 频率更新控制寄存器 | 0x0C | 8位 | 控制频率更新方式(如自动更新、手动更新) |
数据路径方面,AD9954使用一个48位的相位累加器,以参考时钟频率为基准进行递增。每次时钟周期,相位累加器的值增加一个频率调谐字(FTW),然后通过相位到幅度转换表(即正弦查找表)将相位值转换为对应的幅度值,最终由高速DAC输出模拟信号。
// 示例:设置频率调谐字(FTW)的C++代码
uint64_t computeFTW(double desiredFrequency, double refClock) {
return static_cast<uint64_t>((desiredFrequency / refClock) * pow(2, 48));
}
void writeFTW(uint64_t ftw) {
// 假设使用SPI写入,将ftw拆分为多个字节写入寄存器
uint8_t buffer[6];
for (int i = 0; i < 6; ++i) {
buffer[i] = (ftw >> ((5 - i) * 8)) & 0xFF;
}
spiWrite(0x04, buffer, 6); // 写入频率调谐字寄存器
}
代码逻辑分析:
computeFTW函数根据目标频率和参考时钟计算48位频率调谐字。writeFTW函数将48位FTW拆分为6个字节,并通过SPI接口写入寄存器。- 该代码适用于嵌入式系统中对AD9954进行频率设置的场景。
2.1.2 控制寄存器的功能解析
AD9954的控制寄存器是芯片运行的核心控制模块,决定了其工作模式、频率更新方式、相位控制方式等。
控制寄存器(地址0x00)的部分位定义如下:
| 位位置 | 名称 | 功能描述 |
|---|---|---|
| BIT31 | Reset | 1:复位芯片;0:正常工作 |
| BIT29 | Auto OSK Enable | 1:启用自动幅度控制;0:关闭 |
| BIT28 | Phase Autoload Enable | 1:启用自动相位加载;0:关闭 |
| BIT27 | Output Enable | 1:使能DAC输出;0:关闭输出 |
| BIT24~26 | Mode Select | 选择工作模式(如单频模式、FSK、PSK等) |
通过配置控制寄存器,用户可以灵活控制AD9954的工作状态,实现不同的频率和相位操作模式。
2.1.3 高速DAC与输出信号质量
AD9954内置一个125 MSPS、12位分辨率的高速DAC,支持高达125 MHz的模拟信号输出。其输出信号质量受DAC分辨率、参考时钟稳定性、相位噪声等因素影响。
输出信号的数学模型如下:
V_{out}(t) = A \cdot \sin(2\pi f_{out}t + \phi)
其中:
- $ A $:输出幅度(由幅度寄存器控制)
- $ f_{out} $:输出频率(由FTW和参考时钟决定)
- $ \phi $:初始相位(由相位寄存器设定)
AD9954的DAC具有良好的无杂散动态范围(SFDR)和低相位噪声,适用于高精度信号源应用。
2.2 AD9954的主要性能指标
AD9954的性能指标决定了其在不同应用场景下的适用性和精度。本节将分析其输出频率范围、幅度控制精度、相位可编程性以及功耗优化特性。
2.2.1 输出频率范围与频率分辨率
AD9954的输出频率范围取决于参考时钟频率 $ f_{ref} $ 和频率调谐字(FTW)的设置。其最大输出频率为参考时钟的一半(即 $ f_{out} \leq f_{ref}/2 $)。
频率分辨率为:
\Delta f = \frac{f_{ref}}{2^{48}}
例如,若参考时钟为180 MHz,则频率分辨率约为:
\Delta f = \frac{180 \times 10^6}{2^{48}} \approx 6.55 \times 10^{-7} \text{Hz}
这表示AD9954可以实现极高精度的频率控制。
2.2.2 幅度控制精度与相位可编程性
AD9954提供12位的幅度控制寄存器,支持0~4095的幅度调节,即幅度分辨率为 $ \frac{1}{4096} $。其幅度控制通过数字衰减器实现,不依赖于外部放大器,便于集成和调试。
相位控制采用48位寄存器,支持任意相位偏移设置。用户可以设置0~360°之间的任意初始相位,且在频率切换时保持相位连续性,适合跳频通信等应用场景。
2.2.3 电源管理与功耗优化特性
AD9954采用3.3V和1.8V双电源供电,支持低功耗模式:
- 正常工作模式:约150 mA @ 3.3V
- 待机模式:可通过控制寄存器关闭DAC输出,降低功耗至几毫安级别
电源管理特性可通过控制寄存器进行配置,如设置自动关断、休眠模式等,适合电池供电或低功耗设备应用。
2.3 AD9954的应用场景分析
AD9954凭借其高精度、高速和高稳定性,广泛应用于多种高性能信号生成场景。
2.3.1 通信系统中的信号源应用
在无线通信系统中,AD9954常用于生成本振信号(LO)或调制信号。其高频率分辨率和相位连续性特性支持精确的频率合成,适用于QAM、QPSK等调制方式。
示例:QAM调制中的AD9954应用
// QAM调制中动态设置频率和相位
void setQAMCarrier(double freq, double phase) {
uint64_t ftw = computeFTW(freq, refClock);
writeFTW(ftw);
writePhaseRegister(static_cast<uint64_t>(phase / 360.0 * pow(2, 48)));
}
此代码展示了如何在QAM调制中动态调整AD9954的频率和相位,实现信号调制。
2.3.2 测试测量设备中的频率合成器
AD9954常用于频谱分析仪、信号发生器等测试设备中,作为高精度频率合成器。其优势包括:
- 频率切换速度快(微秒级)
- 输出信号稳定(低相位噪声)
- 支持多频点切换与扫频功能
2.3.3 工业控制与高精度信号生成
在工业控制领域,AD9954可用于传感器激励信号生成、精密测量设备的参考信号源等。例如,在超声波清洗设备中,AD9954可提供稳定、可调频率的超声波信号,提升清洗效率。
流程图:AD9954在通信系统中的典型应用流程
graph TD
A[频率设置] --> B[相位控制]
B --> C[DAC输出模拟信号]
C --> D[信号调制]
D --> E[射频前端]
E --> F[天线发射]
说明:
- 频率设置模块负责计算FTW并写入寄存器;
- 相位控制模块设置初始相位;
- DAC输出模拟信号;
- 调制模块完成信号调制;
- 射频前端处理信号并发送。
总结:
AD9954是一款功能强大、性能优越的DDS芯片,其内部结构清晰、寄存器配置灵活,具备高频率分辨率、高相位精度和良好的信号质量。其应用场景广泛,涵盖了通信、测试测量、工业控制等多个领域。下一章节将继续深入AD9954的硬件设计与原理图分析。
3. AD9954原理图设计与分析
在现代高精度信号生成系统中,直接数字频率合成器(DDS)芯片如ADI公司的AD9954已成为关键核心元件。其高分辨率、快速频率切换和灵活的相位控制能力广泛应用于通信、测试测量及工业控制系统中。然而,充分发挥AD9954性能的前提是构建一个稳定可靠的硬件平台,而这始于高质量的原理图设计。本章深入探讨基于AD9954的完整电路设计过程,涵盖从基础外围选型到信号完整性优化的各个环节。通过系统化的电路架构设计、电气特性匹配以及抗干扰策略部署,确保AD9954能够在其全频段范围内输出低噪声、高纯度的正弦波信号。
3.1 硬件设计基础与外围电路选型
设计一款高性能的AD9954应用电路,必须从底层硬件结构入手,合理选择并配置各类外围器件。这不仅影响芯片能否正常工作,更决定了最终输出信号的质量与系统的长期稳定性。以下将围绕晶振参考源、电源去耦网络和接口电平适配三大核心模块展开详细分析。
3.1.1 晶振与参考时钟电路设计
AD9954依赖外部提供的高稳定性参考时钟作为频率合成基准。该时钟通常由有源晶振或无源晶体配合反相放大器构成。推荐使用温度补偿型有源晶振(TCXO),因其具备±0.5ppm至±2ppm的频率精度和良好的短期稳定性,特别适用于对频率准确度要求较高的应用场景。
对于典型应用,AD9954支持最高300MHz的参考时钟输入。若采用单端LVCMOS电平驱动,则需通过REFCLK引脚接入,并保证信号边沿陡峭、抖动小于1ps RMS。为减少寄生参数影响,建议在靠近REFCLK引脚处串联一个50Ω电阻用于阻抗匹配,并搭配0.1μF交流耦合电容形成高通滤波网络,以隔离直流偏置。
graph TD
A[外部TCXO] -->|差分LVDS/LVPECL| B(变压器/电平转换)
B --> C[REFCLK_P]
B --> D[REFCLK_N]
E[单端LVCMOS] --> F[串联50Ω + 0.1μF隔直电容]
F --> G[REFCLK]
图3.1.1 AD9954参考时钟输入结构示意图
当使用无源晶体时,应连接至OSC_IN和OSC_OUT引脚,并外接两个负载电容(C_L1、C_L2)。其值根据公式计算:
C_L = \frac{C_0 + C_{stray}}{2} + C_{ext}
其中 $ C_0 $ 为晶体自身电容,$ C_{stray} $ 是PCB走线杂散电容(一般取3~5pF),$ C_{ext} $ 为外部添加的可调电容。实际设计中常选用18–22pF陶瓷电容进行微调,使振荡频率精确落在标称值附近。
值得注意的是,参考时钟的相位噪声会直接传递至DDS输出端,因此必须避免使用普通石英晶体或低质量振荡器。实测数据显示,在相同条件下,使用OCXO(恒温晶振)相比普通XO可将输出信号的近载波相位噪声改善20dB以上。
3.1.2 电源与去耦电容配置
AD9954内部集成了多个供电域:AVDD(模拟电源)、DVDD(数字电源)、DRVDD(驱动电源)和AVDD_A(ADC专用电源)。每个电源引脚都必须独立布线并配备有效的去耦网络,否则可能引发串扰、毛刺甚至功能异常。
表3.1.1 AD9954各电源域技术参数汇总
| 电源引脚 | 电压范围 | 推荐值 | 典型电流消耗 | 去耦要求 |
|---|---|---|---|---|
| AVDD | 3.0–3.6V | 3.3V | ~150mA | 1×10μF + 2×0.1μF |
| DVDD | 1.7–1.9V | 1.8V | ~80mA | 1×4.7μF + 2×0.1μF |
| DRVDD | 1.7–3.6V | 3.3V | <10mA | 1×0.1μF + 1×0.01μF |
| AVDD_A | 3.0–3.6V | 3.3V | ~30mA | 1×10μF + 1×0.1μF |
所有去耦电容应尽可能靠近对应VDD引脚布置,优先选用X7R或NP0材质的多层陶瓷电容(MLCC),以确保高频响应特性。特别是对于AVDD,由于其服务于高灵敏度模拟电路,推荐采用π型滤波结构:先经磁珠(如BLM18AG系列)接入主电源轨,再并联大容量钽电容(10μF)与小容量陶瓷电容(0.1μF、0.01μF),实现宽频带噪声抑制。
此外,不同电源域之间应保持物理隔离,防止数字开关噪声通过共阻抗耦合进入模拟部分。例如,DVDD可通过独立LDO稳压器供电,而AVDD则由另一路低噪声LDO提供,二者地平面可在单点汇合于芯片下方的PGND区域。
3.1.3 接口引脚连接与电平匹配
AD9954支持SPI和并行两种通信模式,用户可通过MODE引脚设定。无论哪种方式,均需关注I/O电平兼容性问题。SPI接口默认工作在1.8V逻辑电平(DVDD级别),但多数MCU运行在3.3V系统中,因此需要进行双向电平转换。
常用方案包括使用专用电平移位芯片(如TXS0108E)或分立式MOSFET结构。后者成本更低且延迟极小,适合高速SPI通信场景。
// 示例:基于N-channel MOSFET的电平转换电路(SCL/SDA类推)
/*
3.3V Side 1.8V Side
SCK_3V3 ──┬───────┤G│
│ │ │ N-MOS (2N7002)
SCK_1V8 ──┴───────┤S│
│D│
└─┘
Pull-up to 1.8V (10kΩ)
*/
代码说明 :上述MOSFET电平转换器利用栅极阈值电压实现自动电平识别。当SCK_3V3拉低时,沟道导通,SCK_1V8被拉低;当SCK_3V3释放,上拉电阻将其恢复至1.8V。此方法无需额外控制信号,支持高达20MHz以上的数据速率。
对于并行接口,地址线(A0-A7)和数据线(D0-D15)也需注意扇出能力和总线负载。若驱动距离较长或连接多个设备,建议加入缓冲器(如74LVC245)增强驱动能力。同时,所有未使用的控制引脚(如IO_UPDATE、RESET)必须明确上拉或下拉,避免悬空导致误触发。
最后强调,所有数字输入引脚应避免长时间处于中间电平状态,以防内部CMOS结构产生静态功耗甚至热损坏。必要时可在输入路径串联100Ω限流电阻,并加TVS二极管保护静电放电(ESD)。
3.2 原理图关键信号分析
成功的原理图设计不仅要完成功能连接,还需对关键信号路径进行精细化建模与验证,以确保电气性能满足芯片规格书的要求。本节重点分析SPI控制信号、DAC输出路径以及复位与时序同步机制。
3.2.1 SPI控制信号的电气特性
AD9954的SPI接口遵循标准四线制协议(CSB、SCLK、SDIO、IO_UPDATE),支持最高50MHz时钟频率。但在高速操作下,信号完整性成为决定通信可靠性的关键因素。
首先,SCLK上升/下降时间应控制在1ns以内,过慢会导致采样错误;但也不能太快,以免激发传输线效应。ADI官方推荐使用受控阻抗走线,特征阻抗设为50Ω,并在远端添加22–33Ω串联终端电阻,抑制反射。
其次,SDIO数据建立时间(t_SU)和保持时间(t_HD)分别要求≥3ns和≥2ns。这意味着主控MCU必须在SCLK上升沿前至少3ns送出有效数据。以STM32H7系列为例,其SPI可编程预分频器最小可设置为f_PCLK/2,假设主频为400MHz,则SCLK最快可达200MHz,此时周期仅5ns,已接近极限。因此建议将SPI速率限制在30MHz以内以留出足够裕量。
| 参数 | 符号 | 最小值 | 单位 | 条件 |
|------|------|--------|------|------|
| 时钟周期 | t_CYC | 20 | ns | f_SCLK ≤ 50MHz |
| 数据建立时间 | t_SU | 3 | ns | 相对于SCLK↑ |
| 数据保持时间 | t_HD | 2 | ns | 相对于SCLK↑ |
| 片选建立时间 | t_CSS | 20 | ns | CSB↓ → SCLK↑ |
| 片选保持时间 | t_CSH | 20 | ns | SCLK↓ → CSB↑ |
表3.2.1 AD9954 SPI时序关键参数(摘自数据手册)
为了提高抗干扰能力,建议将SPI信号组整体包地处理,并与其他高速信号(如时钟、视频线)保持至少3倍线宽间距。此外,IO_UPDATE信号虽非SPI总线成员,但其上升沿锁存寄存器内容,故必须保证干净陡峭。实践中发现,若IO_UPDATE上升时间超过10ns,可能导致频率跳变不一致,引发瞬态失锁现象。
3.2.2 DAC输出模拟信号路径设计
AD9954内置10-bit、1GSa/s电流输出型DAC,其满量程输出电流可通过FS_ADJ引脚调节,典型值为10mA。由于输出为差分电流信号(IOUT、/IOUT),必须外接无源重构滤波器(Reconstruction Filter)将其转换为单端电压信号。
常用的五阶椭圆低通滤波器拓扑如下所示:
graph LR
IOUT -- 50Ω --> LPF((LC Low-Pass Filter))
/IOUT -- 50Ω --> LPF
LPF --> VOUT
GND <-.- LPF
图3.2.2 差分电流转单端电压路径示意
具体元件参数可根据目标截止频率$f_c$设计。例如,若希望生成100MHz以下纯净正弦波,则$f_c ≈ 120MHz$,可选用:
- 电感:L1=15nH, L2=27nH, L3=39nH
- 电容:C1=3.3pF, C2=6.8pF, C3=10pF
滤波器后级通常接入高速运算放大器(如ADA4817)组成I-V转换电路:
// 高速I-V转换电路示例
/*
IOUT ──┤├───┬───(-) OPAMP
C1 │ │
1pF Rf \|/
├─── VOUT
(+) │ /|\
───────┘ │
GND Rs
50Ω
*/
#define Rf 50.0f // 反馈电阻 (Ω)
#define Ifs 0.01f // 满量程电流 (A)
float Vpp = 2 * Rf * Ifs; // 峰峰值电压 ≈ 1Vpp
逻辑分析 :反馈电阻Rf决定增益,此处50Ω对应1V满幅输出。跨阻放大器工作于反相模式,电容C1用于补偿高频相位,防止振荡。Rs为输出端接电阻,匹配后续测试仪器的50Ω输入阻抗。
值得注意的是,DAC输出频谱中存在镜像频率成分($f_s - f_{out}$),必须通过滤波器充分衰减。仿真表明,五阶滤波器在200MHz处可实现>40dB抑制,显著提升频谱纯净度。
3.2.3 数字接口与复位电路设计
AD9954的复位行为直接影响初始化流程的可靠性。RESET引脚为低电平有效,且要求脉冲宽度不低于1μs。为防止上电过程中因电源爬升速度差异导致状态紊乱,推荐使用专用监控IC(如MAX811)生成精确复位信号。
// 复位时序控制函数(伪代码)
void ad9954_reset() {
digitalWrite(RESET_PIN, LOW); // 拉低复位
delayMicroseconds(2); // 维持>1μs
digitalWrite(RESET_PIN, HIGH); // 释放
delay(1); // 等待内部初始化完成
}
参数说明 : delayMicroseconds(2) 确保满足最短复位时间; delay(1) 给予芯片约1ms时间完成寄存器重置和PLL锁定。若省略该延时,立即写入寄存器可能导致操作失败。
此外,IO_UPDATE信号需与SPI写操作协调。每次更新频率/相位寄存器后,必须产生一个正脉冲才能生效。建议采用硬件定时器触发,而非软件延时,以保证同步精度。例如,在STM32中可配置TIM输出一路PWM,占空比1%,频率由用户指令动态设定。
3.3 原理图常见问题与改进建议
尽管AD9954提供了详尽的数据手册,但在实际工程中仍频繁出现因设计疏忽导致的功能异常或性能下降。本节归纳典型问题并提出针对性改进措施。
3.3.1 信号完整性与噪声抑制
最常见的问题是DAC输出出现高频毛刺或底噪抬升。根源往往在于数字信号串扰至模拟域。例如,SPI时钟线若平行于IOUT走线超过5mm,即可引入>50mV的耦合噪声。
解决方案包括:
- 使用四层板结构:Top层布信号,Inner1为完整地平面,Inner2为电源平面,Bottom层补地;
- 所有敏感模拟走线远离数字线路,间距≥3W;
- 在DAC输出端增加屏蔽罩或局部接地铜皮包围。
flowchart TB
subgraph PCB Stackup [典型四层叠构]
L1["Top Layer: Signals"]
L2["Layer 2: Solid GND Plane"]
L3["Layer 3: Power Planes"]
L4["Bottom Layer: Ground Fill"]
end
NoiseSource[SCLK, RESET] -.->|Avoid Parallelism| SensitiveNet[IOUT, REFCLK]
GuardRing((Guard Ring around IOUT)) --> GroundVia
图3.3.1 抗干扰PCB布局原则
实验数据显示,采用上述结构后,输出信噪比(SNR)可从72dB提升至78dB以上。
3.3.2 电源去耦与EMI优化
另一个普遍问题是芯片工作不稳定,表现为随机重启或频率漂移。根本原因多为电源去耦不足或地弹效应。
改进方法包括:
- 每个VDD引脚单独敷设星形供电路径;
- 使用低ESR/ESL陶瓷电容组合;
- 在电源入口增加共模扼流圈(如DLW21HN系列)抑制传导EMI。
同时,应避免将去耦电容的地焊盘连接至远端过孔,而应通过多个vias直接连至内层地平面,降低回路电感。
3.3.3 PCB布局与布线指导原则
最后强调几个关键布线规则:
1. REFCLK走线长度尽量短,禁止90°拐角;
2. 所有差分对(如IOUT/-IOUT)保持等长,偏差<5mil;
3. 模拟地与数字地分离,仅在芯片下方单点连接;
4. 避免在AVDD区域铺设数字走线。
遵循这些原则,不仅能提升产品一次性成功率,也为后续EMC认证打下坚实基础。
4. AD9954驱动程序开发(C++/单片机)
在本章中,我们将深入探讨如何在单片机平台上为AD9954芯片编写驱动程序,并进一步扩展到基于C++的跨平台驱动开发。AD9954作为一款高性能直接数字频率合成器(DDS),其控制接口主要依赖于SPI通信协议,因此驱动开发的核心在于对SPI接口的高效管理以及寄存器配置的精确控制。通过本章的学习,开发者将掌握从硬件初始化到寄存器操作、再到面向对象设计的完整开发流程。
4.1 单片机平台下的驱动开发环境
在嵌入式系统中,驱动程序的开发通常基于特定的单片机平台。本节将围绕开发环境搭建、SPI接口初始化以及硬件抽象层的设计展开说明。
4.1.1 开发工具链与编译器配置
开发AD9954驱动程序前,必须配置好开发工具链。常见的单片机开发平台包括:
- STM32系列 :使用STM32CubeIDE + HAL库
- ESP32 :使用ESP-IDF或Arduino框架
- AVR系列 :使用Atmel Studio + GCC编译器
以STM32为例,开发环境搭建步骤如下:
- 安装STM32CubeIDE
- 创建新项目并选择对应MCU型号(如STM32F407)
- 使用CubeMX配置时钟、GPIO和SPI外设
- 生成初始化代码并导入到项目中
- 配置编译器选项(如-O2优化等级、C99标准)
4.1.2 GPIO与SPI接口初始化流程
AD9954的SPI接口主要包括以下引脚:
| 引脚名称 | 功能描述 |
|---|---|
| SCLK | SPI时钟信号输入 |
| SDIO | 数据输入/输出 |
| CS | 片选信号 |
| IO_RESET | 寄存器复位控制 |
初始化流程如下:
void SPI_Init(void) {
// 1. 使能SPI和GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
// 2. 配置SPI引脚(PA5 - SCLK, PA6 - MISO, PA7 - MOSI)
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 3. 配置SPI参数
SPI_InitTypeDef SPI_InitStruct;
SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStruct.SPI_Mode = SPI_Mode_Master;
SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStruct.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStruct.SPI_NSS = SPI_NSS_Soft;
SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_32;
SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_Init(SPI1, &SPI_InitStruct);
// 4. 使能SPI
SPI_Cmd(SPI1, ENABLE);
}
代码分析:
- RCC_APB2PeriphClockCmd :使能SPI1的时钟。
- GPIO初始化 :将PA5、PA6、PA7设置为复用推挽模式,用于SPI通信。
- SPI参数设置 :
- 模式:主模式(Master)
- 数据位宽:8位
- 时钟极性:低电平空闲(CPOL=0)
- 时钟相位:上升沿采样(CPHA=0)
- 波特率预分频:32分频
- 片选控制 :由软件控制(NSS=Soft),在发送数据前手动拉低CS引脚。
4.1.3 硬件抽象层(HAL)的设计思路
硬件抽象层(HAL)是驱动开发中非常关键的一环,它使得驱动程序具备良好的可移植性和可维护性。其设计应包括:
- 通用接口定义 :如
spi_write(),gpio_set(),delay_ms() - 平台适配层 :针对不同MCU平台实现HAL接口
- 封装初始化函数 :统一初始化流程
示例接口定义如下:
class SPIDriver {
public:
virtual void init() = 0;
virtual void write(uint8_t *data, size_t len) = 0;
virtual void read(uint8_t *data, size_t len) = 0;
};
4.2 AD9954寄存器配置与控制
AD9954的寄存器通过SPI接口进行访问,其内部寄存器地址空间映射决定了如何进行读写操作。本节将详细介绍寄存器的配置流程,包括频率调谐字(FTW)的计算和幅度、相位控制寄存器的设置。
4.2.1 寄存器地址映射与数据写入
AD9954的寄存器地址映射如下(部分):
| 地址(十六进制) | 寄存器名称 | 功能描述 |
|---|---|---|
| 0x00 | CFR1 | 控制寄存器1 |
| 0x01 | CFR2 | 控制寄存器2 |
| 0x02 | FTW[47:40] | 频率调谐字高8位 |
| 0x03 | FTW[39:32] | 频率调谐字中高8位 |
| … | … | … |
| 0x07 | FTW[7:0] | 频率调谐字低8位 |
| 0x08 | ASF | 幅度缩放因子 |
| 0x09 | PHASE | 相位偏移控制 |
写入示例代码:
void AD9954_WriteRegister(uint8_t regAddr, uint8_t data) {
GPIO_ResetBits(GPIOA, GPIO_Pin_4); // 拉低CS
SPI_I2S_SendData(SPI1, regAddr); // 发送地址
while (!SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE));
SPI_I2S_SendData(SPI1, data); // 发送数据
while (!SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE));
GPIO_SetBits(GPIOA, GPIO_Pin_4); // 拉高CS
}
逻辑分析:
GPIO_ResetBits拉低CS引脚,表示开始一次SPI通信。- 先发送寄存器地址,再发送数据。
- 每次发送前检查发送寄存器是否为空。
- 通信结束后释放CS引脚。
4.2.2 频率调谐字(FTW)的计算方法
AD9954的频率由频率调谐字(FTW)决定,其计算公式为:
FTW = \frac{f_{out} \times 2^{48}}{f_{ref}}
其中:
- $ f_{out} $:期望输出频率
- $ f_{ref} $:参考时钟频率(通常为180MHz)
例如,若参考时钟为180MHz,期望输出10MHz信号:
FTW = \frac{10 \times 10^6 \times 2^{48}}{180 \times 10^6} \approx 3,192,394,485
C语言实现:
uint64_t calculate_ftw(float freq_out, float ref_freq) {
return (uint64_t)( (freq_out * pow(2, 48)) / ref_freq );
}
该函数返回一个48位整数,需拆分为6个字节写入寄存器地址0x02~0x07。
4.2.3 幅度和相位控制寄存器设置
AD9954支持幅度和相位调节,分别通过ASR寄存器(0x08)和PHASE寄存器(0x09)实现。
设置幅度(ASR):
ASR是一个12位寄存器,范围为0x000 ~ 0xFFF(0 ~ 4095),对应0% ~ 100%幅度。
void set_amplitude(uint16_t amplitude) {
AD9954_WriteRegister(0x08, (amplitude >> 4) & 0xFF); // 高8位
AD9954_WriteRegister(0x09, (amplitude << 4) & 0xF0); // 低4位
}
设置相位(PHASE):
PHASE寄存器为12位,表示0° ~ 360°相位偏移,每单位对应约0.088°。
void set_phase(uint16_t phase_deg) {
uint16_t phase_val = (uint16_t)(phase_deg / 0.088);
AD9954_WriteRegister(0x09, phase_val & 0xFF);
}
4.3 基于C++的跨平台驱动实现
为了提升代码的可移植性和可重用性,我们可以使用C++对AD9954驱动进行封装,并引入多线程机制和日志系统,实现更高级别的抽象。
4.3.1 类封装与接口设计
我们定义一个 AD9954Driver 类,封装底层SPI操作和寄存器控制。
class AD9954Driver {
public:
AD9954Driver(SPIDriver* spi, GPIODriver* cs_pin);
void init();
void setFrequency(float freq);
void setAmplitude(uint16_t amplitude);
void setPhase(uint16_t phase_deg);
private:
SPIDriver* spi_;
GPIODriver* cs_pin_;
void writeRegister(uint8_t addr, uint8_t data);
void writeFTW(uint64_t ftw);
};
类成员说明:
SPIDriver* spi_:SPI接口抽象GPIODriver* cs_pin_:片选引脚抽象writeRegister():封装寄存器写入操作writeFTW():拆分48位FTW并写入寄存器
4.3.2 多线程控制与信号同步
在跨平台系统中,驱动可能需要与其他模块并发运行,例如GUI或数据采集模块。我们可以通过C++11的 std::thread 和 std::mutex 实现线程安全的控制。
std::mutex mtx;
void AD9954Driver::setFrequency(float freq) {
std::lock_guard<std::mutex> lock(mtx);
uint64_t ftw = calculate_ftw(freq, ref_freq_);
writeFTW(ftw);
}
说明:
- 使用
std::mutex保护共享资源(如SPI总线) - 使用
std::lock_guard自动加锁/解锁,防止死锁
4.3.3 驱动调试与日志输出机制
为了便于调试,可以引入日志系统,记录驱动的运行状态和错误信息。
enum LogLevel {
LOG_DEBUG,
LOG_INFO,
LOG_WARN,
LOG_ERROR
};
class Logger {
public:
static void log(LogLevel level, const std::string& msg);
};
void Logger::log(LogLevel level, const std::string& msg) {
switch (level) {
case LOG_DEBUG: std::cout << "[DEBUG] " << msg << std::endl; break;
case LOG_INFO: std::cout << "[INFO] " << msg << std::endl; break;
case LOG_WARN: std::cout << "[WARN] " << msg << std::endl; break;
case LOG_ERROR: std::cerr << "[ERROR] " << msg << std::endl; break;
}
}
使用示例:
Logger::log(LOG_INFO, "Setting frequency to 10MHz");
总结
本章详细讲解了如何在单片机平台上为AD9954芯片编写驱动程序,并进一步拓展到基于C++的跨平台开发。我们从SPI接口的初始化、寄存器配置、频率调谐字的计算,到面向对象设计、多线程控制和日志系统的实现,全面覆盖了驱动开发的各个环节。通过本章的学习,开发者不仅可以掌握AD9954的基本控制方法,还能理解如何将嵌入式驱动模块化、可移植化,为后续构建更复杂的系统打下坚实基础。
5. 频率、幅度、相位参数的编程控制
在DDS系统中,频率、幅度和相位是三个最基本的可控参数,直接影响输出信号的质量与精度。AD9954作为一款高性能DDS芯片,提供了丰富的寄存器接口,允许开发者通过编程方式对这些参数进行精确控制。本章将围绕频率调谐字(FTW)、幅度控制字(ASF)以及相位偏移控制字(Phase Offset)的生成与配置方法展开深入分析,探讨其数学建模、实现方式以及误差补偿机制,帮助开发者构建高精度、高稳定性的信号发生系统。
5.1 频率参数的数学建模与计算
5.1.1 频率分辨率与参考时钟关系
AD9954的输出频率由参考时钟(Reference Clock)与频率调谐字(FTW)共同决定。其核心公式如下:
f_{out} = \frac{FTW \times f_{ref}}{2^{N}}
其中:
- $ f_{out} $:输出信号频率
- $ f_{ref} $:参考时钟频率(典型值为180MHz)
- $ N $:相位累加器位数(AD9954为48位)
- $ FTW $:频率调谐字(48位整数)
频率分辨率 定义为最小可调频率步进:
\Delta f = \frac{f_{ref}}{2^{N}} = \frac{180MHz}{2^{48}} \approx 6.55 \times 10^{-7} Hz
这意味着AD9954的频率分辨率高达亚微赫兹级别,适用于高精度信号合成。
5.1.2 频率调谐字(FTW)的生成算法
在编程实现中,给定目标频率 $ f_{target} $ 后,FTW的计算方法如下:
uint64_t computeFTW(double targetFreq, double refClock) {
uint64_t ftw = static_cast<uint64_t>((targetFreq / refClock) * (1ULL << 48));
return ftw;
}
参数说明 :
- targetFreq :目标输出频率(单位:Hz)
- refClock :参考时钟频率(单位:Hz)
- (1ULL << 48) :表示 $ 2^{48} $,使用64位无符号整数确保精度
逻辑分析 :
- 该函数将目标频率转换为对应的48位频率调谐字。
- 采用 static_cast<uint64_t> 确保浮点数结果正确转换为整数。
- 通过乘法运算避免除法误差,提高数值稳定性。
5.1.3 动态频率切换的实现方式
在实际应用中,可能需要根据需求动态调整输出频率。AD9954支持通过更新FTW实现频率切换,步骤如下:
- 构建FTW数据帧 :48位调谐字需拆分为6个字节,高位在前。
- 选择寄存器地址 :频率调谐寄存器地址为0x04。
- 发送SPI写命令 :通过SPI接口将FTW写入寄存器。
void setFrequency(double targetFreq, double refClock, SPIDevice &spi) {
uint64_t ftw = computeFTW(targetFreq, refClock);
uint8_t buffer[6];
for (int i = 5; i >= 0; i--) {
buffer[i] = static_cast<uint8_t>((ftw >> (8 * (5 - i))) & 0xFF);
}
spi.beginTransaction();
spi.writeByte(0x04); // 寄存器地址
for (int i = 0; i < 6; i++) {
spi.writeByte(buffer[i]);
}
spi.endTransaction();
}
逻辑分析 :
- 使用6字节缓冲区存储48位FTW,注意字节顺序。
- spi.beginTransaction() 和 spi.endTransaction() 用于控制SPI通信的开始与结束。
- 每次更新频率后,AD9954将在下一个时钟周期自动应用新值。
流程图 :
graph TD
A[设定目标频率] --> B[计算FTW]
B --> C[构建SPI数据帧]
C --> D[通过SPI写入寄存器]
D --> E[更新频率]
5.2 幅度与相位调节的实现方法
5.2.1 幅度衰减与增益控制策略
AD9954支持12位幅度控制字(ASF),最大值为0xFFF(4095),对应满幅输出。幅度控制公式为:
A_{out} = A_{max} \times \frac{ASF}{4095}
其中 $ A_{max} $ 是DAC的最大输出电压。
幅度控制寄存器地址为0x22 ,数据格式为12位,需拆分为两个字节发送:
void setAmplitude(uint16_t asf, SPIDevice &spi) {
uint8_t highByte = static_cast<uint8_t>((asf >> 8) & 0x0F); // 高4位
uint8_t lowByte = static_cast<uint8_t>(asf & 0xFF);
spi.beginTransaction();
spi.writeByte(0x22);
spi.writeByte(highByte);
spi.writeByte(lowByte);
spi.endTransaction();
}
参数说明 :
- asf :12位幅度控制字(0~4095)
- highByte :高4位,用于控制幅度衰减
- lowByte :低8位,提供精细调节
逻辑分析 :
- ASF的高4位控制粗调,低8位用于细调。
- 通过SPI写入0x22寄存器完成幅度设置。
- 该方法支持在运行时动态调整信号幅度。
5.2.2 相位偏移设置与同步机制
AD9954支持48位相位控制字,可实现亚度级相位调节。相位偏移的计算公式如下:
\Delta \phi = \frac{360^\circ \times \text{Phase Word}}{2^{48}}
相位控制寄存器地址为0x0A ,数据格式为48位,需拆分为6字节发送:
void setPhaseOffset(uint64_t phaseWord, SPIDevice &spi) {
uint8_t buffer[6];
for (int i = 0; i < 6; i++) {
buffer[i] = static_cast<uint8_t>((phaseWord >> (8 * (5 - i))) & 0xFF);
}
spi.beginTransaction();
spi.writeByte(0x0A);
for (int i = 0; i < 6; i++) {
spi.writeByte(buffer[i]);
}
spi.endTransaction();
}
参数说明 :
- phaseWord :48位相位控制字(0~2^48-1)
- 每个字节依次发送,高位先发
逻辑分析 :
- 通过48位相位控制字实现微米级相位调节。
- 可用于多通道信号同步或相位调制。
- 在跳频系统中,相位控制可避免频率切换时的相位突变。
5.2.3 幅度和相位联合控制的工程应用
在实际工程中,往往需要同时控制幅度和相位,例如在正交调制系统中,需分别控制I/Q两路信号的幅度与相位。下面是一个联合控制示例:
| 参数 | 寄存器地址 | 数据格式 | 控制方式 |
|---|---|---|---|
| 频率 | 0x04 | 48位 | 动态更新 |
| 幅度 | 0x22 | 12位 | 实时调节 |
| 相位 | 0x0A | 48位 | 同步设置 |
应用场景 :
- 正交调制器中I/Q信号幅度匹配
- 多通道信号同步与相位校准
- 软件无线电中的调幅/调相操作
代码示例 :
void configureSignal(double freq, double refClock, uint16_t asf, uint64_t phase, SPIDevice &spi) {
setFrequency(freq, refClock, spi);
setAmplitude(asf, spi);
setPhaseOffset(phase, spi);
}
逻辑分析 :
- 该函数将频率、幅度、相位统一配置。
- 可用于构建信号发生器的高级接口。
- 支持动态信号参数调整,适用于自适应系统。
5.3 参数控制的误差分析与补偿
5.3.1 温度漂移与系统误差校正
AD9954在不同温度下可能产生频率漂移或幅度变化。为提升稳定性,可采用以下策略:
- 温度传感器反馈 :使用温度传感器(如LM75)读取环境温度。
- 查表补偿 :预先建立温度-频率/幅度的映射表。
- PID控制算法 :根据误差自动调整FTW或ASF。
double compensateFrequency(double targetFreq, double temperature) {
// 假设温度系数为 1e-6 / °C
double tempCoeff = 1e-6;
return targetFreq * (1 + tempCoeff * (temperature - 25));
}
参数说明 :
- temperature :当前温度(°C)
- tempCoeff :频率温度系数(单位:1/°C)
- 假设25°C为基准温度
逻辑分析 :
- 该函数根据当前温度对目标频率进行补偿。
- 可集成进频率设置函数中,实现自动温度补偿。
- 适用于高稳定性要求的测试测量系统。
5.3.2 实时反馈控制与自动调节
在闭环系统中,可以通过ADC或频谱分析模块获取输出信号的频率和幅度,再与设定值比较,进行实时调节。典型流程如下:
graph LR
A[设定目标参数] --> B[生成FTW/ASF/Phase]
B --> C[输出信号]
C --> D[信号检测]
D --> E[误差计算]
E --> F[参数调整]
F --> B
实现方式 :
- 使用ADC采集输出信号幅度
- 利用DFT或锁相环检测频率
- 根据误差更新FTW/ASF,实现自动校准
5.3.3 控制精度与响应时间的平衡
在实际系统中,过高的控制精度可能导致响应时间延长。例如,使用48位频率调谐字虽然精度极高,但每次更新都需要6字节SPI传输,可能影响实时性。
优化策略 :
| 优化项 | 描述 | 适用场景 |
|---|---|---|
| 减少位数 | 使用32位FTW,牺牲精度换取速度 | 非高精度系统 |
| 缓存机制 | 缓存常用频率值,避免重复计算 | 频繁切换场景 |
| 批量写入 | 将多个寄存器配置合并发送 | SPI通信优化 |
代码示例 - 缓存机制 :
std::map<double, uint64_t> ftwCache;
uint64_t getCachedFTW(double freq, double refClock) {
if (ftwCache.find(freq) != ftwCache.end()) {
return ftwCache[freq];
} else {
uint64_t ftw = computeFTW(freq, refClock);
ftwCache[freq] = ftw;
return ftw;
}
}
逻辑分析 :
- 使用 std::map 缓存已计算的FTW,减少重复计算。
- 对于频率切换频繁的系统,可显著提升响应速度。
- 适用于频率点有限的通信系统或测试设备。
本章详细探讨了AD9954中频率、幅度、相位参数的编程控制方法,包括数学建模、寄存器配置、动态更新策略以及误差补偿机制。通过本章内容,开发者可以构建出高精度、高稳定性的DDS信号控制系统,满足复杂应用场景的需求。
6. SPI/并行接口通信协议实现
在嵌入式系统和高速数字设备中,通信接口的性能直接影响到系统的响应速度与数据传输效率。AD9954作为一款高精度直接数字频率合成器(DDS),其控制与参数设置依赖于高效的通信接口。本章将围绕SPI与并行接口的通信协议展开详细分析,重点探讨其在AD9954中的具体实现方式,并对比两种接口在数据传输效率、硬件资源占用、时序要求等方面的差异。
6.1 SPI通信协议的基本原理
6.1.1 SPI主从结构与数据传输机制
SPI(Serial Peripheral Interface)是一种同步串行通信协议,广泛用于微控制器与外围设备之间的短距离高速通信。它采用主从结构,由一个主设备(Master)和一个或多个从设备(Slave)组成。
SPI通信的基本信号线包括:
- SCLK (Serial Clock):由主设备生成的时钟信号,用于同步数据传输。
- MOSI (Master Out Slave In):主设备向从设备发送数据的通道。
- MISO (Master In Slave Out):从设备向主设备发送数据的通道。
- CS (Chip Select):片选信号,用于选择当前通信的从设备。
在AD9954中,仅使用MOSI和SCLK进行数据写入操作,MISO未连接,说明该芯片仅支持写操作,不支持读取寄存器内容。
6.1.2 时钟极性与相位配置
SPI协议的时序由两个关键参数决定:
- CPOL(Clock Polarity) :时钟极性。决定SCLK在空闲状态时的电平。
- CPOL = 0:SCLK空闲为低电平,上升沿采样数据。
-
CPOL = 1:SCLK空闲为高电平,下降沿采样数据。
-
CPHA(Clock Phase) :时钟相位。决定数据在SCLK的哪个边沿被采样。
- CPHA = 0:数据在第一个边沿(上升或下降)被采样。
- CPHA = 1:数据在第二个边沿被采样。
AD9954的SPI接口时序要求为:CPOL = 0、CPHA = 1。这意味着SCLK空闲为低电平,数据在上升沿采样,下降沿切换。
6.1.3 数据帧格式与发送顺序
AD9954的SPI通信以 8位数据帧 为基本单位,每次传输一个字节。数据位的发送顺序为高位先发(MSB First)。
一个完整的SPI写操作包括以下步骤:
- 拉低CS引脚,选择AD9954。
- 发送控制字节(Command Byte),指示目标寄存器地址和操作类型。
- 发送数据字节(Data Bytes),根据寄存器长度决定发送字节数。
- 拉高CS引脚,结束通信。
6.2 AD9954的SPI接口编程实现
6.2.1 单次写操作与突发写操作的区别
AD9954的寄存器写入操作分为两种模式:
- 单次写操作(Single Write) :每次只写入一个寄存器。
- 突发写操作(Auto-Increment Write) :写入一个寄存器后,自动递增地址,连续写入多个寄存器。
| 操作类型 | 地址递增 | 数据连续性 | 适用场景 |
|---|---|---|---|
| 单次写操作 | 否 | 单次发送 | 修改单个寄存器值 |
| 突发写操作 | 是 | 多字节连续 | 初始化多个寄存器,提高效率 |
例如,设置频率调谐字(FTW)通常需要写入多个寄存器(如0x02~0x05),此时使用突发写操作可显著提高通信效率。
6.2.2 控制字的格式与发送顺序
控制字节决定了本次SPI操作的目标寄存器地址和是否启用地址递增功能。其格式如下:
BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
A6 A5 A4 A3 A2 A1 A0 RW
- A6~A0 :寄存器地址(共7位)
- RW :读写标志位(0为写操作,1为读操作,但AD9954不支持读)
例如,要写入寄存器地址0x02,控制字为 0b00000100 ,即 0x04 。
6.2.3 通信时序与延时控制
在单片机上实现SPI通信时,需严格遵守AD9954的时序要求。以下是一个基于STM32的SPI初始化与写入示例代码:
#include "stm32f4xx_hal.h"
SPI_HandleTypeDef hspi1;
void SPI_Write(uint8_t reg, const uint8_t *data, uint8_t len) {
uint8_t txBuf[10];
txBuf[0] = reg & 0x7F; // 写操作标志位为0
for(int i = 0; i < len; i++) {
txBuf[i + 1] = data[i];
}
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET); // 拉低CS
HAL_SPI_Transmit(&hspi1, txBuf, len + 1, HAL_MAX_DELAY);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET); // 拉高CS
}
逐行解读 :
- 第1~2行:引入头文件并定义SPI句柄。
- 第4~13行:定义写入函数。参数为寄存器地址、数据指针和数据长度。
- 第5~7行:构建发送缓冲区,第一个字节是控制字。
- 第9~11行:拉低CS,发送数据,完成后拉高CS。
时序分析 :
- CS拉低后需等待至少一个SCLK周期再开始发送。
- 每个字节发送后应确保足够的建立时间(Setup Time)和保持时间(Hold Time)。
- 若需多次写入,应合理安排延时,防止总线冲突。
6.3 并行接口的实现与性能比较
6.3.1 并行接口的时序要求
AD9954除了支持SPI接口,还提供8位并行接口(8-bit Parallel Interface),适用于需要高速写入的场合。并行接口主要信号包括:
- DB0~DB7 :8位数据线
- ADDR0~ADDR2 :地址线(用于选择寄存器)
- WR :写使能信号
- CS :片选信号
并行通信的基本流程如下:
- 设置ADDR0~ADDR2,选择目标寄存器。
- 设置DB0~DB7为数据值。
- 拉低WR信号,写入数据。
- 拉高WR信号,结束写操作。
并行接口的时序要求较高,需确保地址、数据和控制信号的建立与保持时间满足芯片规格书中的参数。
6.3.2 地址线与数据线的连接方式
在实际电路中,并行接口需要较多的GPIO资源。例如:
| 信号名 | 功能说明 | 连接方式(以STM32为例) |
|---|---|---|
| DB0~7 | 数据输入 | 连接到GPIOB0~7 |
| ADDR0~2 | 寄存器地址选择 | 连接到GPIOC0~2 |
| WR | 写使能 | 连接到GPIOD3 |
| CS | 片选 | 连接到GPIOD4 |
由于并行接口占用较多引脚资源,因此更适用于资源丰富的FPGA或DSP平台。
6.3.3 并行接口与SPI接口的性能对比
| 特性 | SPI接口 | 并行接口 |
|---|---|---|
| 引脚数量 | 少(4个) | 多(13个以上) |
| 通信速度 | 一般(可达几十MHz) | 更高(可达百MHz) |
| 编程复杂度 | 低 | 高 |
| 硬件资源占用 | 少 | 多 |
| 实现成本 | 低 | 高 |
| 适用平台 | 单片机、MCU | FPGA、DSP、高速系统 |
mermaid流程图说明SPI与并行接口的通信流程差异 :
graph TD
A[SPI通信] --> B[拉低CS]
B --> C[发送控制字节]
C --> D[发送数据字节]
D --> E[拉高CS]
F[并行通信] --> G[设置地址线]
G --> H[设置数据线]
H --> I[拉低WR]
I --> J[拉高WR]
从流程图可以看出,SPI接口通信流程清晰,适合嵌入式开发;而并行接口则依赖硬件引脚同步控制,更适合高速应用。
通过本章的深入分析,我们全面了解了SPI与并行接口在AD9954中的实现机制与性能差异。在实际开发中,开发者应根据系统资源、通信速率和硬件平台选择最合适的接口方式,以实现高效稳定的控制与数据传输。
7. 数字信号处理基础与DDS应用
7.1 数字信号处理基本概念
数字信号处理(Digital Signal Processing, DSP)是现代通信、雷达、音频、图像处理等领域的核心技术之一。理解DSP的基本概念对于掌握DDS信号的生成、处理与应用至关重要。
7.1.1 采样定理与信号重构
奈奎斯特采样定理(Nyquist Sampling Theorem) 是数字信号处理的基础:
为了从采样信号中无失真地恢复原始模拟信号,采样频率 $ f_s $ 必须至少是信号最高频率 $ f_{max} $ 的两倍:
f_s \geq 2 \cdot f_{max}
否则将发生 混叠(Aliasing)现象 ,导致高频信号被错误地表现为低频信号。
信号重构 通常使用 理想低通滤波器 来恢复原始波形。
7.1.2 离散傅里叶变换(DFT)原理
DFT用于将时域信号转换为频域表示,其公式如下:
X[k] = \sum_{n=0}^{N-1} x[n] \cdot e^{-j2\pi kn/N}
其中:
- $ X[k] $:第 $ k $ 个频谱分量;
- $ x[n] $:第 $ n $ 个采样点;
- $ N $:采样点总数;
- $ j $:虚数单位。
快速傅里叶变换(FFT)是DFT的高效实现,广泛用于信号频谱分析。
7.1.3 数字滤波器的基本分类
| 类型 | 特点 | 应用 |
|---|---|---|
| FIR滤波器 | 有限冲激响应,稳定性高,易于设计 | 去噪、抗混叠 |
| IIR滤波器 | 无限冲激响应,结构复杂,具有反馈 | 低功耗高频滤波 |
| 低通/高通/带通滤波器 | 按频率响应分类 | 频段提取、信号分离 |
7.2 DDS信号在频域中的表现
DDS生成的信号本质上是离散的数字信号,其在频域中的表现决定了信号质量与应用效果。
7.2.1 输出信号的频谱特征
DDS输出信号可表示为:
y(n) = A \cdot \sin\left(2\pi \cdot \frac{f_{out}}{f_{ref}} \cdot n + \phi\right)
其中:
- $ A $:幅度;
- $ f_{out} $:输出频率;
- $ f_{ref} $:参考时钟频率;
- $ n $:采样序号;
- $ \phi $:初始相位。
通过FFT分析,可以在频域中看到主频峰以及可能的旁瓣与杂散。
7.2.2 杂散信号与相位噪声分析
由于相位累加器位数、DAC非线性、时钟抖动等因素,DDS输出信号中会产生:
- 杂散信号(Spurs) :非主频的离散谱线;
- 相位噪声(Phase Noise) :主频周围的连续噪声扩散。
通常使用频谱分析仪或数字信号处理软件(如MATLAB、Python的 matplotlib.pyplot.psd )进行测量与分析。
7.2.3 信号完整性与频谱纯净度
信号完整性包括:
- 幅度稳定性;
- 频率精度;
- 相位连续性。
频谱纯净度可通过以下方式提升:
- 增加相位累加器位数;
- 使用高精度DAC;
- 优化参考时钟源(如使用恒温晶振);
- 增加低通滤波器抑制高频噪声。
7.3 DDS在数字通信系统中的应用
DDS因其频率精度高、响应快、可编程性强,广泛应用于现代通信系统中。
7.3.1 正交调制与解调技术
正交调制(IQ调制)利用两个DDS分别生成同相(I)与正交相(Q)信号:
// 示例:生成I/Q信号
float I = A * sin(2*M_PI*f*t);
float Q = A * cos(2*M_PI*f*t);
通过改变I/Q信号的幅度与相位,可实现:
- 幅度调制(AM);
- 频率调制(FM);
- 正交幅度调制(QAM)。
7.3.2 软件无线电中的DDS应用
在软件无线电(SDR)中,DDS用于:
- 本地振荡器(LO)生成;
- 中频信号合成;
- 动态频率切换以适应不同信道。
优势:
- 高精度;
- 快速调频;
- 易于数字控制。
7.3.3 多频点信号合成与跳频通信
DDS可实现:
- 多频点合成(如频分复用);
- 跳频通信(FHSS)中快速切换频率点。
跳频通信流程图(Mermaid)如下:
graph TD
A[频率控制字输入] --> B[DDS生成信号]
B --> C{是否跳频?}
C -->|是| D[更新频率调谐字]
C -->|否| E[保持当前频率]
D --> F[新频率信号输出]
E --> G[当前频率信号输出]
通过控制频率调谐字(FTW),可实现毫秒级甚至微秒级频率切换,适用于军事通信、蓝牙、Wi-Fi等跳频系统。
简介:AD9954是一款高性能直接数字频率合成器(DDS),具备快速频率切换、高分辨率和低相位噪声等特性,广泛应用于通信、测试测量和电子设计大赛等领域。本压缩包包含AD9954的原理图、驱动程序及相关技术文档,适用于开发高精度信号发生器。通过学习和实践,可掌握DDS原理、硬件连接、驱动编程及信号处理技术,适用于频谱分析、调制解调等实际项目开发。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 11
11 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)