
基于51单片机与ESP8266的WiFi无线控制实验实战项目
在嵌入式物联网系统中,51单片机凭借其高稳定性与成熟生态,常作为主控单元负责传感器采集、外设驱动及逻辑控制;而ESP8266则以其集成Wi-Fi能力承担网络通信任务。两者通过UART实现串行数据交互,形成“主控+通信”协作架构。ESP8266之所以能够在嵌入式领域广泛应用,根本原因在于其高度集成的设计理念。该芯片内置了一个主频最高可达160MHz的32位CPU,支持运行FreeRTOS或裸机程序;

简介:本实验项目介绍如何利用经典51单片机与高性能ESP8266 WiFi模块实现远程无线控制功能。通过UART串行通信,51单片机发送AT指令配置ESP8266连接WiFi网络,并基于TCP/IP协议实现数据传输与远程指令响应。项目涵盖硬件连接、AT命令配置、单片机编程、HEX文件烧录及系统调试等完整流程,适用于物联网基础开发学习。实验内容包含电路设计、通信协议应用与安全优化策略,帮助开发者掌握嵌入式系统联网核心技术,为后续智能控制项目奠定实践基础。 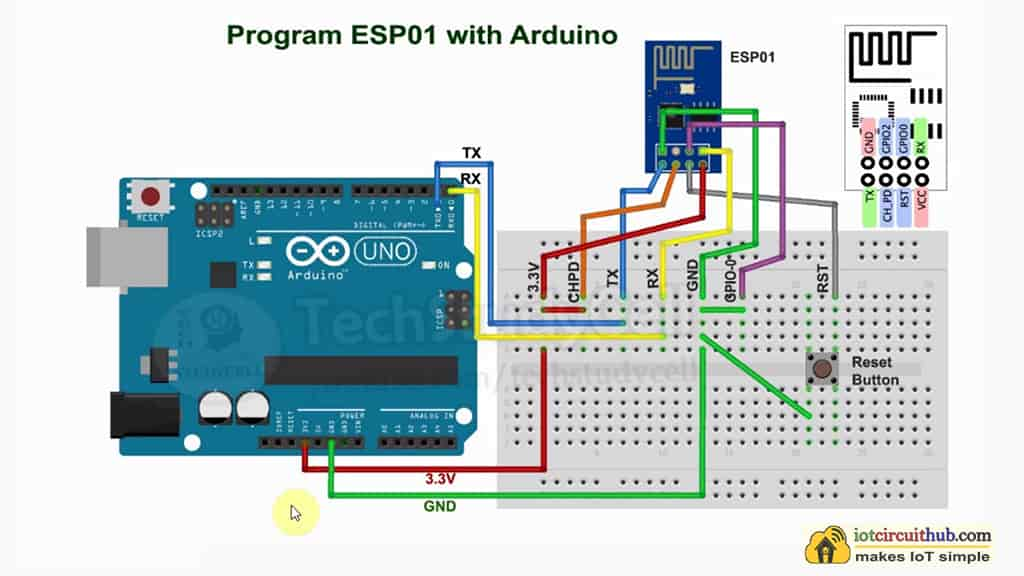
1. 51单片机与ESP8266协同工作原理
1.1 协同工作机制概述
在嵌入式物联网系统中,51单片机凭借其高稳定性与成熟生态,常作为主控单元负责传感器采集、外设驱动及逻辑控制;而ESP8266则以其集成Wi-Fi能力承担网络通信任务。两者通过UART实现串行数据交互,形成“主控+通信”协作架构。
1.2 串行通信基础与协议匹配
通信基于异步串行协议,采用TTL电平(3.3V),波特率通常设为9600或115200bps。数据帧由起始位(低电平)、8位数据、无/偶校验位和1位停止位构成。51单片机通过查询或中断方式接收ESP8266返回的AT指令响应,实现对接入状态、IP获取、TCP连接等事件的精准控制。
1.3 角色分工与同步机制设计
51单片机为主机,发起配置命令如 AT+CWMODE=1 、 AT+CWJAP 等;ESP8266为从机,自动回应 OK 或 ERROR 。为确保时序匹配,需在MCU端设置合理延时等待模块就绪,并通过状态反馈判断下一步操作,避免指令冲突或丢包。
2. ESP8266-WIFI模块特性与工作模式解析
在物联网系统设计中,通信模块的选型直接决定了终端设备能否实现高效、稳定、灵活的联网能力。ESP8266作为一款由乐鑫科技(Espressif Systems)推出的高集成度Wi-Fi芯片,凭借其低成本、小体积、强功能和良好的开发支持,迅速成为各类无线应用中的核心组件之一。本章将深入剖析ESP8266模块的关键特性,重点解析其三种主要工作模式——STA、AP以及混合模式的技术原理,并结合初始化流程与实际操作案例,全面揭示该模块如何在不同网络拓扑结构中发挥作用。
ESP8266不仅具备完整的TCP/IP协议栈处理能力,还集成了Tensilica L106 32位RISC处理器、片上内存、射频前端、MAC控制器及多种外设接口,使得它既可以独立运行轻量级应用程序(如使用NodeMCU固件),也可作为从设备通过AT指令集与主控MCU(如51单片机)协同完成网络通信任务。理解其内部架构、引脚定义、电源管理机制以及多模式切换逻辑,是构建可靠无线控制系统的前提。
2.1 ESP8266核心功能与引脚定义
ESP8266之所以能够在嵌入式领域广泛应用,根本原因在于其高度集成的设计理念。该芯片内置了一个主频最高可达160MHz的32位CPU,支持运行FreeRTOS或裸机程序;同时集成Wi-Fi Baseband、RF收发器、PA/LNA放大电路、PLL频率合成器等无线通信单元,能够在无需外部协处理器的情况下完成完整的802.11 b/g/n协议处理。此外,芯片提供丰富的GPIO资源(通常为9~17个可编程引脚),支持UART、I²C、SPI、PWM等多种通信接口,极大提升了其在复杂场景下的适配能力。
2.1.1 内部架构与无线射频单元
ESP8266的核心是一颗基于Tensilica Xtensa架构定制的L106处理器,采用哈佛结构,具有独立的数据和指令总线,能够实现高效的并行访问。该处理器包含中断控制器、定时器、看门狗、ADC模块以及DMA引擎,配合片内SRAM(约80KB)和外部Flash存储空间(通过SPI接口扩展),构成了一个完整的嵌入式计算平台。
无线射频部分主要包括以下几个关键子系统:
- RF Transceiver(射频收发器) :负责将数字信号调制为2.4GHz ISM频段的模拟射频信号,并进行接收解调。
- Baseband Processor(基带处理器) :执行物理层(PHY)协议处理,包括编码、调制(BPSK/QPSK/16-QAM)、信道估计与纠错。
- MAC Controller(媒体访问控制层) :实现CSMA/CA机制、帧封装/解析、ACK响应、连接管理等功能。
- Antenna Switch & Power Amplifier(天线开关与功率放大器) :用于增强发射功率(最大约+20dBm)并选择外接PCB天线或IPEX接口。
整个无线通信链路由固件驱动,在出厂烧录的标准AT指令固件下,开发者无需关心底层协议细节即可实现Wi-Fi连接与数据传输。
以下为典型ESP-01模块的内部功能框图(使用Mermaid绘制):
graph TD
A[32-bit Tensilica L106 CPU] --> B[SRAM & ROM]
A --> C[UART Interface]
A --> D[GPIOs]
A --> E[SPI Flash Controller]
A --> F[WLAN MAC]
F --> G[Baseband Processor]
G --> H[RF Transceiver]
H --> I[Power Amplifier]
I --> J[Antenna]
K[Voltage Regulator] --> A
K --> G
此架构表明,ESP8266不仅能自主完成Wi-Fi协议处理,还能通过串口与外部主控交互,非常适合以“主控+通信协处理器”方式部署于传统单片机系统中。
2.1.2 关键引脚说明(VCC、GND、TX、RX、CH_PD、GPIO0)
ESP8266模块有多种封装形式(如ESP-01、ESP-12E/F等),但基本引脚功能保持一致。以下是常见引脚的功能说明表格:
| 引脚名称 | 引脚编号(以ESP-01为例) | 功能描述 |
|---|---|---|
| VCC | Pin 8 | 正电源输入,需提供稳定的3.3V电压,电流需求峰值可达300mA以上 |
| GND | Pin 4 | 接地端,必须与主控系统共地 |
| TX | Pin 6 | 串行发送端,输出至主控MCU的RX引脚,电平为3.3V TTL |
| RX | Pin 5 | 串行接收端,接收来自主控MCU的命令,输入电平应为3.3V,不可接5V |
| CH_PD | Pin 7 | 芯片使能引脚,高电平有效(>2.0V),拉低则模块进入休眠状态 |
| GPIO0 | Pin 2 | 多用途通用IO;在启动时决定工作模式:接地表示进入下载/烧录模式,悬空或上拉表示正常运行 |
其中, RX引脚特别需要注意 :由于ESP8266内部没有5V耐压保护,若直接连接51单片机(通常输出5V TTL电平)会导致永久损坏。因此必须通过电平转换电路(如分压电阻或专用电平转换芯片)将5V信号降至3.3V以下。
示例电路如下(使用两个电阻实现分压):
51单片机 TX → R1 (10kΩ) → ESP8266 RX
↓
R2 (20kΩ)
↓
GND
此时,当51输出5V时,ESP8266 RX端获得电压约为:
$$ V_{out} = 5V × \frac{20k}{10k + 20k} ≈ 3.33V $$
满足安全输入范围。
此外, CH_PD引脚 建议通过一个10kΩ上拉电阻连接到VCC,确保上电后自动使能模块;必要时可通过MCU控制该引脚实现软复位或节能控制。
而 GPIO0 的状态直接影响启动行为:
- 启动时 GPIO0 = LOW → 进入Flash烧录模式(用于更新固件)
- 启动时 GPIO0 = HIGH 或悬空 → 正常运行模式
因此在常规通信应用中,应确保GPIO0处于上拉状态(例如通过10kΩ电阻接VCC),避免意外进入下载模式导致无法响应AT指令。
2.1.3 电源管理与上电时序要求
ESP8266对供电质量极为敏感,尤其在Wi-Fi发射瞬间会产生高达300mA以上的瞬态电流,若电源设计不当极易引发复位、死机甚至芯片损坏。
上电时序规范
根据官方Datasheet,ESP8266上电过程需满足以下条件:
- 电压上升时间(Rise Time) :应在0.1ms ~ 100ms之间;
- 最小启动电压 :必须达到2.5V以上才能保证正常启动;
- 电源纹波 :建议小于100mVpp;
- CH_PD延时激活 :应在VCC稳定后至少延迟100μs再拉高CH_PD。
违反上述时序可能导致模块无法完成初始化或反复重启。
电源设计方案推荐
推荐使用低压差稳压器(LDO)如AMS1117-3.3或RT9193-3.3,搭配滤波电容组合:
- 输入端:10μF电解电容 + 0.1μF陶瓷电容
- 输出端:10μF钽电容或陶瓷电容 + 0.1μF高频去耦电容
布局时应尽量缩短电源走线,电容靠近模块VCC引脚放置,以降低寄生电感影响。
浪涌电流应对策略
实测显示,ESP8266在建立Wi-Fi连接或发送数据包时会出现明显的电流尖峰。为防止电压跌落,可在电源路径中串联一个小阻值(0.5~1Ω)的磁珠,并增加储能电容(如47μF~100μF)来缓冲瞬态负载。
此外,不建议使用USB转串模块(如CH340G板载LDO)直接供电,因其输出能力有限(通常仅100mA),易造成不稳定。最佳做法是使用独立的3.3V电源模块或DC-DC转换器集中供电。
2.2 工作模式详解:STA、AP与STA+AP混合模式
ESP8266支持三种基本的工作模式,每种模式对应不同的网络角色和应用场景。掌握这些模式的差异及其配置方法,有助于根据项目需求灵活设计网络拓扑结构。
2.2.1 STA模式下的客户端接入机制
STA(Station)模式即客户端模式,类似于手机连接路由器的方式。在此模式下,ESP8266作为一个无线终端设备,主动搜索并连接已有的Wi-Fi网络(SSID),从而接入局域网并获取IP地址,进而访问互联网或其他局域网服务。
技术实现流程
- 模块上电后执行Wi-Fi扫描,列出周围可用AP;
- 用户通过AT命令指定目标SSID和密码;
- 模块发起认证与关联请求;
- 成功连接后,通过DHCP获取IP地址;
- 可建立TCP/UDP连接,与服务器通信。
常用AT指令序列如下:
AT+CWMODE=1 // 设置为STA模式
AT+CWJAP="MyWiFi","password123" // 连接指定热点
AT+CIFSR // 查询分配到的IP地址
成功连接后返回:
WIFI GOT IP
+IPD,0,12:"192.168.1.105"
应用场景举例
- 智能插座连接家庭路由器,接受远程APP控制;
- 温湿度传感器上传数据至云平台(如阿里云IoT、ThingsBoard);
- 基于HTTP/MQTT协议的物联网终端。
| 特性 | 描述 |
|---|---|
| 网络角色 | 客户端 |
| 是否可被发现 | 否(除非开启mDNS或Beacon响应) |
| 支持协议 | DHCP, DNS, TCP, UDP, HTTP, MQTT等 |
| 最大连接数 | 取决于固件版本,一般支持最多5个TCP连接 |
⚠️ 注意:STA模式下模块无法直接被其他设备发现,除非运行Web Server或启用mDNS广播服务。
2.2.2 AP模式构建本地热点的技术实现
AP(Access Point)模式下,ESP8266自身充当无线路由器,创建一个Wi-Fi热点供其他设备连接。此时模块作为网络中心节点,负责管理接入设备的IP分配(内置DHCP服务器)、数据转发和会话维持。
配置步骤与参数设置
AT+CWMODE=2 // 设置为AP模式
AT+CWSAP="ESP_AP","12345678",5,3 // 设置SSID、密码、信道、加密方式
AT+CIFSR // 查看AP的IP地址(默认192.168.4.1)
参数说明:
"ESP_AP":热点名称(SSID)"12345678":密码,长度不少于8位5:信道号(1~11)3:加密类型(0=OPEN, 2=WPA, 3=WPA2, 4=WPA/WPA2)
连接成功后,手机或电脑可搜索到名为“ESP_AP”的Wi-Fi信号,连接后浏览器访问 http://192.168.4.1 即可与模块交互。
典型应用场景
- 无路由器环境下的设备调试(如野外采集终端);
- 配置向导:首次使用时让用户通过手机连接ESP热点并输入家中Wi-Fi信息;
- 局域网内点对点控制(如遥控小车、灯光调节)。
graph LR
A[手机] -- Wi-Fi --> B(ESP8266 AP)
C[平板] -- Wi-Fi --> B
D[笔记本] -- Wi-Fi --> B
B --> E[Web Server]
E --> F[控制GPIO]
该模式的优势在于脱离现有网络即可组网,适合临时部署或封闭环境使用。
2.2.3 混合模式在网络拓扑中的应用场景
混合模式(STA+AP)允许ESP8266同时扮演客户端和热点双重角色。在这种模式下,模块一方面连接外部路由器(STA),另一方面开放自己的热点(AP),形成桥接或代理结构。
启用方式
AT+CWMODE=3 // 同时启用STA和AP模式
随后可分别配置两种模式的参数:
AT+CWJAP="HomeWiFi","myhomepass" // 连接外部网络
AT+CWSAP="Config_AP","config123",6,3 // 开放本地配置热点
此时模块拥有两个IP地址:
- STA接口:从路由器获取(如192.168.1.88)
- AP接口:默认192.168.4.1
两者处于不同子网,互不冲突。
实际应用价值
- 配置中继模式 :用户先连接ESP热点,输入家庭Wi-Fi账号密码,保存后模块自动切换至STA模式联网,提升用户体验;
- 双通道冗余通信 :即使主网络中断,仍可通过AP模式维持本地控制;
- 边缘网关原型 :实现传感器数据本地展示 + 远程同步上传。
例如,在智能家居网关中,可设计如下逻辑:
// 伪代码示意
if (first_time_boot) {
enter_softAP_mode(); // 开启AP供配置
} else {
connect_to_saved_wifi(); // 尝试STA连接
if (fail) start_ap_fallback();// 失败则开启备用AP
}
这种灵活性使其成为复杂物联网系统中的理想中间节点。
2.3 模块初始化流程与状态检测方法
成功的通信始于可靠的初始化。ESP8266在每次上电或复位后都需经历一系列自检与启动阶段,只有准确判断其当前状态,才能安全地发送后续指令。
2.3.1 上电自检与固件启动过程
当VCC与CH_PD均有效后,ESP8266开始执行启动流程:
- BootROM加载 :芯片首先运行固化在ROM中的引导代码;
- Flash读取 :从外部SPI Flash读取用户程序或AT固件;
- RAM初始化 :设置堆栈指针、中断向量表;
- 外设初始化 :UART、GPIO、Wi-Fi PHY逐一激活;
- Wi-Fi扫描/连接 :依据上次保存的配置尝试恢复网络;
- 串口就绪 :输出“ready”提示符,等待AT指令。
整个过程耗时约1~2秒,期间可通过串口观察启动日志。
典型启动输出如下:
ets Jan 8 2013,rst cause:1, boot mode:(3,6)
load 0x4010f000, len 3456, room 16
tail 0
chksum 0xcc
load 0x3ffe8000, len 764, room 8
tail 4
chksum 0x92
load 0x3ffe82fc, len 676, room 4
tail 0
chksum 0x22
csum 0x22
2nd boot version : 1.7(5d6f877)
SPI Speed : 40MHz
SPI Mode : QIO
SPI Flash Size & Map: 8Mbit(512KB+512KB)
jump to run user1 @ 1000
rf_cal end
wifi evt: 1
ready
其中,“ready”表示模块已准备就绪,可以接收AT指令。
2.3.2 反馈信息解析与就绪判断
为避免指令丢失或响应错乱,必须建立健壮的状态检测机制。常见做法是发送测试指令并监听回显:
// C语言示例(基于51单片机UART)
void wait_for_ready() {
uart_send_string("AT\r\n");
delay_ms(500);
if (uart_receive_contains("OK")) {
printf("Module is ready.\n");
} else {
printf("No response, retrying...\n");
reset_esp8266(); // 触发硬件复位
}
}
更高级的做法是引入超时重试机制:
#define MAX_RETRIES 5
int check_ready_with_retry() {
int retries = 0;
while (retries < MAX_RETRIES) {
uart_send("AT\r\n");
if (wait_for_response("OK", 1000)) { // 等待1秒内收到OK
return 1; // 成功
}
retries++;
delay_ms(1000);
}
return 0; // 失败
}
参数说明:
wait_for_response(str, timeout):轮询接收缓冲区,查找指定字符串;timeout:防止无限等待,提升系统鲁棒性。
2.3.3 常见异常状态及其成因分析
| 异常现象 | 可能原因 | 解决方案 |
|---|---|---|
| 无任何输出 | 电源不足、CH_PD未拉高、TX/RX反接 | 检查供电、CH_PD上拉、串口交叉连接 |
| 输出乱码 | 波特率不匹配 | 默认AT固件波特率为115200bps,需同步设置主控UART |
| 返回ERROR | 指令格式错误、参数越界、Wi-Fi密码错误 | 核对AT命令语法,逐条调试 |
| 反复重启 | 电源波动、CH_PD抖动、过热 | 加大滤波电容,屏蔽干扰源,改善散热 |
| 连接失败(FAIL) | SSID不存在、密码错误、信号弱 | 使用AT+CWLAP扫描确认热点存在 |
例如,若出现“ERROR”且不确定来源,可启用回显功能排查:
AT+E=1 // 打开命令回显
此后所有输入命令都会被原样返回,便于确认是否传输正确。
2.4 实践案例:配置ESP8266进入指定工作模式
理论知识最终需落地为可执行的操作流程。以下通过三个典型实例,演示如何通过AT指令精准控制ESP8266进入不同工作模式,并构建实用控制环境。
2.4.1 使用AT命令切换至STA模式并连接路由器
目标:让ESP8266连接家中Wi-Fi,获取IP后可用于后续HTTP请求。
操作步骤:
- 连接电路,确保供电稳定、串口交叉、电平匹配;
- 打开串口助手(如XCOM、SSCOM),设置波特率115200,8N1;
- 发送以下命令序列:
AT // 测试通信
AT+CWMODE=1 // 设置为STA模式
AT+RST // 重启生效
AT+CWJAP="Your_SSID","Your_Password"
AT+CIFSR // 查看IP地址
预期结果:
WIFI CONNECTED
WIFI GOT IP
+IPD:192.168.1.123
若长时间无响应,请检查:
- 路由器是否开启MAC过滤;
- 密码是否含特殊字符(需转义);
- 信号强度是否足够。
2.4.2 构建AP模式下手机直连控制环境
目标:创建一个热点,手机连接后可通过网页控制LED。
步骤:
AT+CWMODE=2
AT+CWSAP="LED_CTRL","12345678",5,3
AT+CWSAP? // 查询配置
AT+CIFSR // 获取192.168.4.1
然后在模块运行一个简单的Web Server(需自定义固件或使用NodeMCU Lua脚本),监听80端口,响应 /led/on 和 /led/off 请求。
手机连接“LED_CTRL”后,浏览器访问 http://192.168.4.1/led/on 即可点亮LED。
2.4.3 多模式动态切换的程序逻辑设计
在实际系统中,往往需要根据环境自动切换模式。以下为C语言伪代码框架:
void system_init() {
init_uart();
if (!check_sta_connection()) { // 尝试连接历史网络
start_ap_hotspot("SetupWizard"); // 启动配置热点
wait_for_client_config(); // 等待用户输入SSID/pass
save_config_and_reboot();
}
}
void loop() {
if (button_pressed()) {
toggle_ap_mode(); // 手动触发AP模式用于重新配置
}
}
该设计实现了“智能配网”逻辑,极大提升了产品易用性。
综上所述,ESP8266的多功能性源于其强大的硬件集成与灵活的软件配置能力。深入理解其引脚功能、电源要求、工作模式及初始化机制,是实现稳定无线通信的基础保障。
3. 硬件连接与串口通信接口设计
在嵌入式物联网系统中,51单片机与ESP8266模块的协同工作依赖于稳定可靠的硬件连接和精确的串行通信接口设计。尽管软件层面的协议解析与指令交互决定了功能实现的逻辑完整性,但若缺乏合理的物理层支撑,整个系统的稳定性将大打折扣。本章深入探讨从电源管理、电平匹配到信号完整性的全链路硬件设计原则,并结合实际应用场景提出可落地的连接方案。通过系统化分析各子模块之间的电气特性差异,明确关键引脚的功能分配与控制策略,构建一个既能满足通信速率需求又具备抗干扰能力的最小无线控制系统平台。
3.1 系统电气连接方案设计
3.1.1 51单片机与ESP8266的物理连接方式
51单片机(如STC89C52或AT89S51)通常运行在5V供电环境,而ESP8266模块则为3.3V电平器件。这种电压等级的不一致直接导致两者之间不能直接进行数字信号交互,必须通过电平转换机制来确保数据传输的可靠性。最基础的物理连接包括UART通信线(TX/RX)、共地线(GND)、使能控制线(CH_PD)以及模式选择线(GPIO0)。其中,51单片机的P3.0(RXD)应连接至ESP8266的TX引脚,P3.1(TXD)连接至ESP8266的RX引脚,形成交叉串行通信路径。
此外,为了实现对ESP8266的复位控制和工作模式切换,还需将51单片机的I/O口分别连接至CH_PD(使能端,高电平有效)和GPIO0(烧录/运行模式选择)。当GPIO0拉低并配合复位操作时,ESP8266进入固件烧录模式;正常运行时GPIO0需保持高电平。因此,在实际布线中建议使用上拉电阻(10kΩ)将GPIO0默认置为高电平,并通过NPN三极管或MOSFET由MCU控制其状态。
下表列出了典型连接关系:
| 51单片机引脚 | 功能说明 | ESP8266引脚 | 连接方式 |
|---|---|---|---|
| P3.0 (RXD) | 接收数据 | TX | 直接连(经电平转换) |
| P3.1 (TXD) | 发送数据 | RX | 经电平转换后连接 |
| GND | 公共参考地 | GND | 直接连接 |
| P1.0 | 控制CH_PD | CH_PD | 上拉至3.3V,MCU驱动 |
| P1.1 | 控制GPIO0 | GPIO0 | 上拉+开关控制 |
该连接结构构成了主控与Wi-Fi模块之间的基本通信框架,是后续所有网络功能实现的前提。
graph TD
A[51单片机] -->|TXD →| B[电平转换电路]
B -->|3.3V TX| C[ESP8266 RX]
C -->|TX| D[电平转换电路]
D -->|RXD ←| A
E[共地线 GND] --> A & C
F[P1.0] --> G[CH_PD 控制]
H[P1.1] --> I[GPIO0 模式选择]
上述流程图清晰展示了信号流向与控制路径,强调了电平转换和共地的重要性。
3.1.2 电平转换电路设计(如使用MAX232或电平匹配电阻)
由于51单片机输出为5V TTL电平,而ESP8266的输入耐压仅为3.6V,长期施加5V信号可能导致芯片损坏。因此必须引入电平转换机制。常见解决方案有三种:分压电阻法、专用电平转换芯片(如TXS0108E)、以及光耦隔离方案。
方案一:分压电阻法(低成本推荐)
适用于仅单向通信(如MCU → ESP8266)的情况。以RX端为例,采用两个电阻R1=2kΩ、R2=3kΩ构成分压网络:
51单片机 TXD (5V) —— R1 (2kΩ) ——→ ESP8266 RX (3.3V)
|
R2 (3kΩ)
|
GND
根据分压公式:
$$ V_{out} = V_{in} \times \frac{R2}{R1 + R2} = 5 \times \frac{3}{2+3} = 3V $$
此电压低于ESP8266最大输入电压3.3V,符合安全要求。优点是成本低、元件易得;缺点是无法用于反向通信(ESP8266 TX → 51 RX),且响应速度受限于RC时间常数。
方案二:专用电平转换芯片(推荐用于双向高速通信)
使用如74LVC245、TXB0108等双向电平转换器,支持自动方向检测,可同时处理5V ↔ 3.3V双向信号。这类芯片内部集成了MOSFET开关阵列,具有低延迟、高驱动能力的特点,适合波特率高达115200bps甚至更高的通信场景。
示例连接如下:
// 伪代码示意电平转换芯片使能控制
#define DIR_PIN P2_0 // 方向控制引脚(部分芯片需要)
#define OE_PIN P2_1 // 输出使能
void init_level_shifter() {
OE_PIN = 0; // 使能输出
DIR_PIN = 1; // 设置方向:A侧(5V)→B侧(3.3V)
}
参数说明 :
OE_PIN用于启用芯片输出,低电平有效;DIR_PIN决定数据流向,具体取决于所选芯片手册定义。此类芯片无需额外延时处理,透明传输数据。
逻辑分析 :电平转换的本质是在不改变数据内容的前提下,适配不同供电域的电压标准。选择何种方案取决于系统对可靠性、成本、体积的要求。对于长期运行的工业级应用,强烈建议采用专用转换芯片而非简单分压。
3.1.3 共地处理与抗干扰布线原则
共地是保证信号完整性的基础。即使采用了完美的电平转换电路,若未实现良好的共地连接,仍可能出现通信乱码、误触发等问题。原因在于“地”不仅是参考电位点,更是返回电流的通路。当两设备地电位存在差异(地弹)时,接收端感知的信号电平会发生偏移。
实践中应遵循以下布线准则:
- 单点共地 :避免形成地环路,将51单片机系统与ESP8266系统的GND在一点处连接,通常靠近电源入口。
- 宽走线或铺铜 :PCB设计中,地线宽度应≥20mil,优先采用大面积铺铜并多点打过孔连接到底层地平面。
- 远离高频干扰源 :UART信号线应避开晶振、DC-DC转换器、电机驱动等噪声源,平行布线长度不宜超过1cm。
- 加磁珠滤波 :在ESP8266的VCC入口串联铁氧体磁珠(如BLM18AG),抑制高频噪声传导。
此外,建议在电源入口处增加去耦电容组合:10μF电解电容 + 0.1μF陶瓷电容并联,就近放置于模块电源引脚附近,有效降低瞬态电流引起的电压波动。
| 干扰类型 | 成因 | 防护措施 |
|---|---|---|
| 地弹 | 多点接地形成环流 | 单点共地,短而粗的地线 |
| 电磁干扰(EMI) | Wi-Fi射频辐射影响MCU | 屏蔽罩、间距分离、地平面隔离 |
| 电源噪声 | 开关电源纹波 | LDO稳压 + π型滤波 |
| 信号反射 | 长线传输阻抗不匹配 | 添加330Ω串联电阻 |
综上所述,系统电气连接不仅是简单的“插线”,而是涉及电平适配、信号完整性、电磁兼容等多维度工程问题。合理的设计可显著提升通信成功率与系统鲁棒性。
3.2 UART通信接口的硬件实现
3.2.1 TX/RX交叉连接的正确接法
UART(通用异步收发器)是最常用的串行通信协议之一,其核心原理是通过起始位、数据位、停止位构成帧结构进行逐字节传输。在51单片机与ESP8266的连接中,必须严格遵守“发送对接接收”的原则,即:
- 51单片机的 TXD(发送端) → ESP8266的 RX(接收端)
- 51单片机的 RXD(接收端) ← ESP8266的 TX(发送端)
这种交叉连接方式确保了数据流的方向正确。值得注意的是,某些初学者容易误将TX接TX、RX接RX,导致通信失败。此外,ESP8266的TX输出为3.3V CMOS电平,虽然多数51单片机的输入能识别3.3V作为高电平(因CMOS门限约为0.7×Vcc=3.5V),但在Vcc=5V时存在一定风险。因此仍建议加入电平转换或使用施密特触发输入增强抗噪能力。
下面是一个典型的初始化配置代码片段(基于Keil C51):
#include <reg52.h>
typedef unsigned char uchar;
typedef unsigned int uint;
void UART_Init() {
TMOD = 0x20; // 定时器1工作于模式2(8位自动重载)
TH1 = 0xFD; // 波特率9600bps @11.0592MHz
TL1 = 0xFD;
TR1 = 1; // 启动定时器1
SM0 = 0;
SM1 = 1; // 设置为模式1:8位UART
REN = 1; // 允许接收
EA = 1; // 开启总中断
ES = 1; // 开启串口中断
}
void UART_SendByte(uchar dat) {
SBUF = dat;
while(!TI); // 等待发送完成
TI = 0; // 清除发送标志
}
void UART_SendString(uchar *str) {
while(*str) {
UART_SendByte(*str++);
}
}
逐行解读 :
TMOD = 0x20:设置定时器1为模式2(8位自动重装),用于生成波特率时钟。TH1=0xFD:根据晶振频率11.0592MHz计算得,对应9600bps的标准值。REN=1:允许串口接收,否则只能发送。ES=1:开启串行中断,便于非阻塞接收处理。SBUF:串行数据缓冲寄存器,写入即启动发送。TI:发送中断标志,硬件置位,需手动清零。
该代码实现了基本的串口通信功能,为后续AT指令交互提供了底层支持。
3.2.2 自举引脚(GPIO0)在烧录与运行模式间的切换
ESP8266的GPIO0引脚具有双重作用:正常运行时作为普通IO;但在上电或复位期间,其电平状态决定芯片启动模式。
| GPIO0 电平 | 启动模式 | 功能说明 |
|---|---|---|
| 高(>2.0V) | Flash Boot | 执行用户程序,正常运行 |
| 低(<0.5V) | Download Mode | 等待串口下载新固件 |
因此,在系统设计中必须动态控制GPIO0的状态。例如,在调试阶段需通过MCU将GPIO0拉低后再触发复位,以便使用Flash工具(如esptool.py)更新固件;而在产品运行时则需确保其始终处于高电平。
推荐硬件电路如下:
GPIO0 ──┬── 10kΩ ── VCC (3.3V)
│
└── NPN三极管基极(经1kΩ限流)
|
MCU控制引脚(P1.1)
当MCU输出高电平时,三极管导通,GPIO0被拉低;输出低电平时截止,上拉电阻使其恢复高电平。
stateDiagram-v2
[*] --> PowerOn
PowerOn --> Check_GPIO0
Check_GPIO0 --> DownloadMode: GPIO0 == LOW
Check_GPIO0 --> NormalRun: GPIO0 == HIGH
DownloadMode --> WaitForData
WaitForData --> ProgramFlash: 接收到有效数据
NormalRun --> ExecuteUserApp
该状态图清晰表达了ESP8266的启动决策流程,凸显GPIO0的关键作用。
3.2.3 复位电路与使能信号控制
ESP8266的复位引脚(RST或RESET)为低电平有效,通常需要持续至少10μs的低脉冲才能触发复位。为提高系统可控性,建议由51单片机通过I/O口直接控制该引脚,而非仅依赖外部复位按钮。
典型电路设计包含:
- 外部复位按钮:连接至RST与GND之间,按下时拉低。
- 上拉电阻(10kΩ):保证常态下RST为高。
- MCU控制线:经反相器或三极管接入,实现软件复位。
同时,CH_PD(Chip Power Down)引脚也至关重要。该引脚用于唤醒或关闭ESP8266的射频单元,高电平工作,低电平休眠。实测表明,若CH_PD悬空或电平不稳定,模块可能频繁重启。
因此建议将其连接至稳压后的3.3V电源,并可通过MOSFET由MCU控制通断,实现低功耗管理。
| 引脚名称 | 控制方式 | 推荐电平 | 备注 |
|---|---|---|---|
| RST | MCU I/O + 按钮 | 高电平工作 | 下降沿触发复位 |
| CH_PD | 直接上拉或MOSFET | 高电平工作 | 必须稳定,否则模块无法启动 |
通过软硬结合的方式,可实现对ESP8266的精细控制,为后续远程唤醒、节能运行等功能奠定基础。
3.3 供电系统设计与稳定性保障
3.3.1 3.3V稳压电源选型与滤波电容配置
ESP8266在Wi-Fi发射瞬间电流可达300mA以上,峰值功率需求远超一般LDO的负载能力。若电源响应缓慢或内阻过大,会导致电压跌落,引发模块复位或通信中断。
因此,电源设计需重点关注以下几点:
- 稳压芯片选型 :推荐使用AMS1117-3.3、LD1117S33TR或XC6206P332MR等低压差稳压器,输出电流能力≥500mA。
- 输入储能电容 :在VIN端并联100μF电解电容 + 0.1μF陶瓷电容,吸收瞬态冲击。
- 输出去耦电容 :紧邻ESP8266的VCC引脚放置10μF钽电容 + 0.1μF陶瓷电容,降低高频噪声。
典型电源电路如下:
5V_in ──┬── 100μF ── GND
└── AMS1117 VIN
VOUT ──┬── 10μF ── GND
└── 0.1μF ── GND
└── ESP8266 VCC
此外,若使用开关电源(如MP2307),需注意其输出纹波是否满足ESP8266要求(建议<100mVpp)。
3.3.2 浪涌电流应对策略与电源隔离技术
ESP8266在每次连接Wi-Fi或发送数据包时都会产生电流突变,尤其在STA模式下更为明显。若多个模块共用同一电源轨,可能相互干扰。
应对策略包括:
- 独立供电 :为ESP8266配备专用LDO,与MCU电源分离。
- 软启动电路 :使用TPS22904等负载开关,限制初始浪涌电流。
- TVS保护 :在电源输入端添加SMAJ3.3A瞬态抑制二极管,防止静电或雷击损坏。
表格对比不同供电方式优劣:
| 供电方式 | 成本 | 效率 | 稳定性 | 适用场景 |
|---|---|---|---|---|
| 共用5V转3.3V | 低 | 中 | 差 | 实验原型 |
| 独立AMS1117 | 中 | 高 | 好 | 小批量产品 |
| DC-DC + LDO | 高 | 极高 | 极好 | 高密度、长续航设备 |
3.3.3 长时间运行下的热稳定性测试
长时间通电条件下,LDO自身也会发热。以AMS1117为例,压差2V、电流300mA时功耗达0.6W,若无散热片可能导致温升超过100°C。
建议采取以下措施:
- 使用带散热焊盘的封装(如SOT-223);
- PCB布局时加大铜箔面积辅助散热;
- 在高温环境中进行连续72小时压力测试,监测电压波动与通信成功率。
通过综合优化供电设计,可大幅提升系统在复杂环境下的可靠性。
3.4 实践验证:搭建最小无线控制系统硬件平台
3.4.1 使用杜邦线完成开发板间连接
在实验室环境下,可使用STM32/51最小系统板 + ESP-01S模块 + 面包板快速搭建测试平台。步骤如下:
- 将51单片机开发板的TXD、RXD引出;
- 插入电平转换模块(如MAX3232或电阻分压);
- 连接ESP-01S的RX、TX;
- 共地连接;
- 通过跳线帽控制GPIO0状态;
- 接入3.3V稳压电源(禁止使用USB口直接供电)。
完成后可通过串口调试助手发送 AT 命令验证通信。
3.4.2 示波器观测通信波形与信号完整性
使用示波器探头测量TX线上波形,观察:
- 起始位下降沿是否陡峭;
- 数据位宽度是否符合波特率设定;
- 是否存在振铃或过冲现象。
理想波形应为规则矩形波,边沿清晰。若出现畸变,应检查布线长度、负载电容或增加终端匹配电阻。
3.4.3 故障排查:无响应、乱码、频繁重启等问题定位
常见问题及解决方法:
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 无响应 | 电平不匹配、未共地 | 检查电平转换与GND连接 |
| 返回乱码 | 波特率错误 | 确认双方波特率一致(常用115200) |
| 频繁重启 | 电源不足、CH_PD不稳定 | 更换电源、加固CH_PD上拉 |
| AT命令无效 | GPIO0未置高 | 检查启动模式 |
通过系统化排查,可迅速定位并修复硬件缺陷,确保平台稳定运行。
4. UART通信参数配置与AT指令交互实践
在嵌入式物联网系统中,51单片机与ESP8266之间的通信依赖于串行异步通信协议UART(Universal Asynchronous Receiver/Transmitter)。该通信方式虽结构简单、资源占用少,但其稳定性和可靠性高度依赖于通信参数的精确匹配以及命令交互机制的严谨设计。本章深入探讨如何科学配置UART通信参数,并通过AT指令实现对ESP8266模块的精准控制。从波特率设定到数据帧格式选择,再到实际应用中的AT命令发送与响应处理流程,内容层层递进,结合代码示例、通信时序分析和错误应对策略,构建一个完整可靠的串口交互体系。
4.1 串口通信参数设定规范
UART通信本质上是一种基于时间同步的异步传输机制,其核心在于发送端与接收端对“每一比特持续时间”达成一致。若双方参数不匹配,则会导致数据错位、乱码甚至完全无法解析。因此,在51单片机与ESP8266之间建立有效通信前,必须确保以下关键参数完全一致: 波特率、数据位、停止位和校验位 。这些参数共同定义了通信帧的结构和传输速率。
4.1.1 波特率匹配(常用9600、115200bps)
波特率(Baud Rate)表示每秒传输的符号数,通常也等同于每秒传输的位数(bit/s),是决定通信速度的核心参数。对于51单片机而言,其串口模块通过定时器T1或T2产生波特率时钟信号;而ESP8266出厂默认支持多种波特率,最常见的是 9600、115200 bps 。
| 常用波特率 | 适用场景 | 优点 | 缺点 |
|---|---|---|---|
| 9600 | 初级调试、低速设备兼容 | 稳定性高,抗干扰能力强 | 数据吞吐量低 |
| 115200 | 正常运行、频繁数据交互 | 高速响应,适合HTTP请求 | 对时钟精度要求高 |
当使用STC89C52RC型号51单片机时,若采用11.0592MHz晶振并设置定时器1为模式2(自动重装),可较为精确地生成标准波特率。计算公式如下:
TH1 = TL1 = 256 - (OSC_FREQ / (32 * 12 * BAUD_RATE))
例如,设置波特率为115200bps:
// 晶振频率 11.0592MHz
#define OSC_FREQ 11059200UL
#define BAUD_RATE 115200
unsigned char th1 = 256 - (OSC_FREQ / (32 * 12 * BAUD_RATE)); // ≈ 255
对应初始化代码段:
void UART_Init_115200() {
TMOD |= 0x20; // 定时器1工作于模式2(8位自动重载)
TH1 = 0xFF; // 115200对应初值(查表或计算得)
TL1 = 0xFF;
TR1 = 1; // 启动定时器1
SCON = 0x50; // 串口模式1,允许接收
PCON &= 0x7F; // 波特率不加倍
}
逐行逻辑分析:
-TMOD |= 0x20:设置定时器1为8位自动重装模式(模式2),用于产生波特率时钟。
-TH1 = TL1 = 0xFF:根据计算结果写入初值,使溢出周期接近所需波特率间隔。
-TR1 = 1:启动定时器运行。
-SCON = 0x50:SM0=0, SM1=1 → 模式1(10位UART);REN=1 → 允许接收。
-PCON &= 0x7F:清零最高位,禁用SMOD倍频功能。
此配置下,实测误差小于0.8%,满足ESP8266接收容差范围(一般±2%以内即可正常工作)。
4.1.2 数据位、停止位与校验位设置
UART帧由起始位、数据位、可选校验位和停止位组成。标准配置如下:
- 数据位(Data Bits) :通常为8位,即每次传输一个字节;
- 停止位(Stop Bits) :1位为主流,部分老旧设备可能使用1.5或2位;
- 校验位(Parity Bit) :无校验(None)最为常见,尤其在Wi-Fi模块通信中基本不用奇偶校验。
ESP8266官方文档明确指出,默认通信格式为: 8-N-1 (8数据位、无校验、1停止位)。这一格式也被绝大多数AT命令交互所采用。
可通过以下流程图说明一帧完整的UART数据包结构:
sequenceDiagram
participant MCU as 51单片机
participant ESP as ESP8266
Note over MCU,ESP: UART帧结构 (8-N-1)
MCU->>ESP: 起始位 (0)
MCU->>ESP: D0 (LSB)
MCU->>ESP: D1
MCU->>ESP: D2
MCU->>ESP: D3
MCU->>ESP: D4
MCU->>ESP: D5
MCU->>ESP: D6
MCU->>ESP: D7 (MSB)
MCU->>ESP: 停止位 (1)
上述流程图展示了单个字节“Hello”的’H’字符(ASCII=72, 二进制=01001000)的传输过程。注意:低位先行(LSB first),因此D0先发。
4.1.3 通信协议一致性对可靠性的影响
即使硬件连接正确,若通信参数存在微小偏差(如波特率误差过大、校验方式不同),仍可能导致间歇性丢包或响应延迟。实践中曾出现因误设为7-E-1而导致AT命令返回乱码的情况。
建议在系统启动阶段加入自动协商机制或强制统一配置。例如,在MCU端上电后首先向ESP8266发送一条测试命令:
void Send_AT_Test() {
UART_SendString("AT\r\n");
Delay_ms(500);
if (UART_ReceiveResponse("OK")) {
printf("Serial communication established.\n");
} else {
printf("Baud rate mismatch or module not responding.\n");
}
}
该函数尝试发送最基本的AT指令,并等待“OK”回应。若失败,则应尝试切换至其他常见波特率(如9600、57600)进行探测,直到成功建立通信链路。
4.2 AT命令集基础语法与执行机制
ESP8266通过AT指令集提供对外控制接口,开发者无需编写复杂的TCP/IP协议栈代码即可实现联网功能。理解AT命令的语法规则和响应机制,是实现远程控制的基础。
4.2.1 命令格式(AT+指令名[=参数])与回显规则
所有AT命令均以“AT”开头,后接具体操作指令。基本语法如下:
AT<Command>[=<Parameters>]\r\n
例如:
- AT —— 测试模块是否在线
- AT+CWMODE=1 —— 设置为STA模式
- AT+CWJAP="MyWiFi","password" —— 连接指定Wi-Fi网络
ESP8266支持两种工作模式下的回显行为:
- 回显开启(Echo Enable) :输入的字符会被原样返回,便于调试;
- 回显关闭(Echo Disable) :仅返回执行结果,节省带宽。
可通过 ATE0 关闭回显, ATE1 开启。
4.2.2 响应码解析(OK、ERROR、FAIL)
模块执行完命令后会返回状态信息,主要类型包括:
| 响应码 | 含义 | 处理建议 |
|---|---|---|
OK |
命令执行成功 | 继续下一步操作 |
ERROR |
语法错误或不可识别命令 | 检查拼写、换行符 |
FAIL |
命令合法但执行失败(如密码错误) | 记录日志并重试 |
WIFI CONNECTED |
已连接Wi-Fi | |
WIFI GOT IP |
成功获取IP地址 |
示例响应序列:
AT+CWJAP="HomeNet","12345678"
WIFI DISCONNECT
WIFI CONNECTED
WIFI GOT IP
+IPD,0,12:"Hello World"
OK
注意:某些事件属于异步通知,不应作为当前命令的成功标志。
4.2.3 命令执行延时与反馈等待处理
由于Wi-Fi连接涉及射频扫描、认证、DHCP等多个步骤,部分AT命令执行耗时较长(可达数秒)。若程序未设置足够等待时间,极易误判为超时失败。
推荐采用非阻塞轮询机制读取响应:
typedef enum {
CMD_WAITING,
CMD_SUCCESS,
CMD_TIMEOUT,
CMD_ERROR
} CmdStatus;
CmdStatus Wait_For_Response(const char* expected, uint16_t timeout_ms) {
uint32_t start = GetTickCount();
char buffer[64] = {0};
uint8_t index = 0;
while ((GetTickCount() - start) < timeout_ms) {
if (UART_DataAvailable()) {
char c = UART_GetChar();
buffer[index++] = c;
if (strstr(buffer, expected)) {
return CMD_SUCCESS;
}
if (strstr(buffer, "ERROR") || strstr(buffer, "FAIL")) {
return CMD_ERROR;
}
if (index >= 63) break;
}
Delay_ms(10);
}
return CMD_TIMEOUT;
}
参数说明:
-expected:期望匹配的字符串(如”OK”)
-timeout_ms:最大等待毫秒数(建议AT+CWJAP设为10000)
-GetTickCount():用户实现的毫秒级计时函数
该函数具备良好的扩展性,可用于各类AT命令的结果监听。
stateDiagram-v2
[*] --> Idle
Idle --> Waiting: 发送AT命令
Waiting --> Success: 收到OK
Waiting --> Error: 收到ERROR/FAIL
Waiting --> Timeout: 超时未响应
Success --> [*]
Error --> [*]
Timeout --> [*]
4.3 关键网络配置命令实战应用
掌握基础语法后,需将理论应用于典型网络配置任务,完成从本地连接到云端通信的跃迁。
4.3.1 连接Wi-Fi网络(AT+CWJAP)
连接目标路由器是最关键的第一步。命令格式:
AT+CWJAP="SSID","PASSWORD"
执行流程如下:
- 确保模块处于STA模式(
AT+CWMODE=1) - 发送连接命令
- 等待“WIFI GOT IP”提示
- 查询IP地址确认连接成功
代码实现:
bool Connect_To_WiFi(const char* ssid, const char* pwd) {
char cmd[64];
sprintf(cmd, "AT+CWJAP=\"%s\",\"%s\"\r\n", ssid, pwd);
UART_SendString(cmd);
CmdStatus status = Wait_For_Response("OK", 10000);
if (status == CMD_SUCCESS) {
return true;
} else {
printf("WiFi connect failed.\n");
return false;
}
}
注意事项:
- SSID和密码区分大小写
- 若网络加密方式为WPA2-PSK,密码长度不得少于8位
- 多次失败后建议重启模块
4.3.2 获取IP地址(AT+CIFSR)与模式查询(AT+CWMODE)
成功连接后需获取本地IP以便后续通信:
void Get_Local_IP() {
UART_SendString("AT+CIFSR\r\n");
// 预期返回:+CIFSR:STAIP,"192.168.1.100"
}
查询当前工作模式:
void Query_Mode() {
UART_SendString("AT+CWMODE?\r\n");
// 返回:+CWMODE:1 或 +CWMODE:3
}
可通过表格归纳常用查询类命令:
| 命令 | 功能 | 示例输出 |
|---|---|---|
AT+CIFSR |
查看IP地址 | +CIFSR:STAIP,"192.168.1.100" |
AT+CWLAP |
扫描周边AP | 列出多个SSID、信号强度 |
AT+CWJAP? |
查看已连接热点 | +CWJAP:"MyRouter" |
AT+GMR |
查看固件版本 | 1.7.0 |
4.3.3 建立TCP连接(AT+CIPSTART)与发送HTTP请求(AT+CIPSEND)
实现与远程服务器通信的关键三步:
- 设置为单连接模式:
AT+CIPMUX=0 - 建立TCP连接:
AT+CIPSTART="TCP","api.example.com",80 - 发送HTTP GET请求:
UART_SendString("AT+CIPSEND=64\r\n"); // 请求发送64字节
Delay_ms(500);
UART_SendString("GET /data?device=01 HTTP/1.1\r\nHost: api.example.com\r\n\r\n");
注意:
AT+CIPSEND后需等待>提示符再发送正文,否则无效。
flowchart TB
A[MCU发送AT+CIPSTART] --> B{ESP8266发起TCP连接}
B --> C[连接成功 → 返回CONNECT OK]
C --> D[MCU发送AT+CIPSEND]
D --> E[ESP8266返回>]
E --> F[MCU发送HTTP报文]
F --> G[服务器返回JSON数据]
G --> H[ESP8266转发+IPD...]
H --> I[MCU解析数据]
4.4 错误处理与命令重试机制实现
在真实环境中,网络波动、电源不稳、信号干扰等因素常导致AT命令执行失败。为此,必须引入健壮的错误处理机制。
4.4.1 超时判定与自动重发逻辑
定义通用重试函数:
bool Execute_AT_Command_With_Retry(const char* cmd,
const char* expect,
uint8_t max_retries) {
for (uint8_t i = 0; i < max_retries; i++) {
UART_SendString(cmd);
CmdStatus result = Wait_For_Response(expect, 5000);
if (result == CMD_SUCCESS) {
return true;
}
Delay_ms(1000); // 间隔重试
}
return false;
}
应用场景:连接Wi-Fi时最多尝试3次。
4.4.2 CRC校验在命令帧中的引入尝试
虽然AT指令本身无内置校验,但可在应用层添加CRC16校验以增强完整性验证:
uint16_t CRC16(const uint8_t* data, uint16_t len) {
uint16_t crc = 0xFFFF;
for (int i = 0; i < len; ++i) {
crc ^= data[i];
for (int j = 0; j < 8; ++j) {
if (crc & 0x0001) {
crc = (crc >> 1) ^ 0xA001;
} else {
crc >>= 1;
}
}
}
return crc;
}
将命令+参数打包计算CRC,附加至末尾,接收方验证后再执行。
4.4.3 日志记录与调试信息输出设计
建议在MCU端维护一个环形缓冲区记录最近N条AT交互日志:
#define LOG_SIZE 10
char at_log_buffer[LOG_SIZE][64];
uint8_t log_index = 0;
void Log_AT_Command(const char* cmd, const char* resp) {
snprintf(at_log_buffer[log_index], 64, "CMD:%s → %s", cmd, resp);
log_index = (log_index + 1) % LOG_SIZE;
}
配合串口助手输出,极大提升现场排障效率。
classDiagram
class ATLogger {
+char buffer[10][64]
+uint8_t index
+Log(char* cmd, char* resp)
+DumpAll()
}
class UARTHandler {
+Send(char*)
+Receive()
+SetBaud(uint32_t)
}
class CommandExecutor {
+ExecuteWithRetry()
+WaitForResponse()
}
ATLogger --> CommandExecutor : 日志注入
CommandExecutor --> UARTHandler : 底层驱动调用
5. 基于TCP/IP协议的远程控制通信实现
在物联网系统中,设备与云端或移动端之间的远程通信是核心功能之一。51单片机作为主控制器负责采集传感器数据、执行本地逻辑运算并响应外部指令,而ESP8266则承担起网络层和传输层的任务,通过TCP/IP协议栈实现与远端服务器的数据交互。本章将深入探讨如何利用ESP8266模块在有限资源下高效地实现TCP/IP通信,并结合51单片机完成完整的远程控制闭环。
随着智能家居、工业监控等应用场景对实时性与可靠性的要求不断提高,仅靠简单的AT指令发送已无法满足复杂业务需求。因此,理解底层通信机制、构建稳定的连接模型、设计合理的数据格式以及引入基础安全策略,成为提升系统整体性能的关键环节。接下来的内容将从协议栈简化实现入手,逐步展开HTTP通信细节,最终实现一个具备双向通信能力的远程控制系统。
5.1 TCP/IP协议栈在ESP8266上的简化实现
ESP8266虽然是一款低成本Wi-Fi芯片,但其内部集成了轻量级的TCP/IP协议栈,支持完整的IPv4网络通信功能。对于嵌入式开发者而言,无需深入了解每一层协议的具体实现,但仍需掌握关键流程如IP地址获取、连接建立与数据确认机制,以便优化通信效率与稳定性。
5.1.1 IP地址获取与ARP协议作用
当ESP8266工作于STA模式时,必须通过DHCP(动态主机配置协议)从路由器获取有效的IP地址才能接入局域网。这一过程通常由模块固件自动完成,在成功连接Wi-Fi后调用 AT+CIFSR 命令即可查询当前分配的IP地址。
// 示例:通过串口向ESP8266发送查询IP命令
void send_get_ip_command() {
uart_send_string("AT+CIFSR\r\n"); // 发送AT指令
delay_ms(1000); // 等待响应
}
代码逻辑分析:
- uart_send_string("AT+CIFSR\r\n") :通过UART向ESP8266发送标准AT指令, \r\n 为指令结束符。
- delay_ms(1000) :预留足够时间让模块处理请求并返回结果,避免读取超时。
- 此函数应在Wi-Fi连接成功后调用,否则可能返回ERROR。
| 参数 | 说明 |
|---|---|
| AT+CIFSR | 查询本地IP地址、MAC地址及DNS信息 |
| 返回值示例 | +CIFSR:STAIP,"192.168.1.105" |
| 执行条件 | 必须已通过AT+CWJAP连接到AP |
在网络通信过程中,ARP(Address Resolution Protocol)起到至关重要的作用。它用于将IP地址映射为物理MAC地址。例如,当ESP8266需要向网关(192.168.1.1)发送数据包时,首先会广播ARP请求:“谁拥有192.168.1.1?”收到回应后记录其MAC地址,后续通信便可直接寻址。
sequenceDiagram
participant ESP8266
participant Router
participant Server
ESP8266->>Router: ARP Request (Who has 192.168.1.1?)
Router-->>ESP8266: ARP Reply (I am, MAC=AA:BB:CC:DD:EE:FF)
ESP8266->>Server: IP Packet via Ethernet Frame
该流程确保了链路层的正确封装,是TCP连接建立的前提。
5.1.2 TCP三次握手与连接维持机制
TCP是一种面向连接的可靠传输协议。在ESP8266与远程服务器建立数据通道前,必须经历三次握手过程:
- SYN :客户端(ESP8266)发送SYN=1,Seq=x;
- SYN-ACK :服务器回复SYN=1, ACK=1,Seq=y, Ack=x+1;
- ACK :客户端回传ACK=1,Ack=y+1,连接建立。
此过程可通过AT指令 AT+CIPSTART 触发:
// 建立TCP连接示例
void establish_tcp_connection() {
uart_send_string("AT+CIPSTART=\"TCP\",\"192.168.1.100\",8080\r\n");
delay_ms(3000); // 预留较长时间等待握手完成
}
参数说明:
- "TCP" :指定传输层协议类型;
- "192.168.1.100" :目标服务器IP地址;
- 8080 :目标端口号;
- \r\n :标准AT命令终止符。
若连接失败,模块可能返回 ERROR 或 FAIL ,常见原因包括防火墙拦截、IP不可达或端口未开放。建议添加重试机制:
uint8_t connect_with_retry(uint8_t max_retries) {
for (int i = 0; i < max_retries; i++) {
establish_tcp_connection();
if (wait_for_response("CONNECT OK", 5000)) {
return 1; // 成功
}
delay_ms(2000);
}
return 0; // 失败
}
为了维持长连接活跃,还需定期发送心跳包或接收保活探测。ESP8266支持TCP Keep-Alive机制,可通过 AT+CIPKEEPALIVE 设置保活周期:
AT+CIPKEEPALIVE=1 // 启用Keep-Alive
AT+CIPSTO=30 // 设置连接超时时间为30秒
这有助于防止因NAT超时导致连接中断。
5.1.3 数据分包与确认应答流程
由于MTU(最大传输单元)限制,TCP会自动对大数据进行分段传输。每一段包含序列号(Seq)、确认号(Ack)和校验和字段。接收方收到数据后需返回ACK确认,若发送方未在规定时间内收到确认,则重新发送该段。
ESP8266通过 AT+CIPSEND 发送数据时,底层TCP层会处理分包与重传:
void send_sensor_data(float temp, float humi) {
char buffer[64];
sprintf(buffer, "GET /data?temp=%.2f&humi=%.2f HTTP/1.1\r\nHost:api.example.com\r\n\r\n", temp, humi);
uart_send_string("AT+CIPSEND=");
uart_send_int(strlen(buffer)); // 指定发送长度
uart_send_string("\r\n");
delay_ms(500);
uart_send_string(buffer); // 实际数据
}
逻辑解析:
- 先发送 AT+CIPSEND=<length> 告知模块即将发送的数据长度;
- 模块返回 > 提示符后开始传输实际内容;
- 若长度不匹配或缓冲区溢出,可能导致 SEND FAIL 错误。
为提高可靠性,可在应用层加入消息ID与确认机制:
| 消息ID | 内容 | 是否确认 |
|---|---|---|
| 0x01 | Temp=25.3 | ✅ 已ACK |
| 0x02 | Humi=60% | ❌ 待重发 |
这种方式可弥补TCP仅保证“到达”而不保证“被处理”的缺陷。
5.2 HTTP通信原理与请求构造
HTTP是构建在TCP之上的应用层协议,广泛应用于Web服务接口调用。ESP8266可通过构造符合规范的HTTP请求,向云平台上传数据或获取控制指令。
5.2.1 GET与POST请求格式差异
GET请求将参数附加在URL后,适合小量数据上报:
GET /update?device_id=001&status=on HTTP/1.1
Host: iot-server.com
Connection: close
POST请求则将数据放在请求体中,适用于较大负载:
POST /api/v1/data HTTP/1.1
Host: iot-server.com
Content-Type: application/json
Content-Length: 45
Connection: close
{"device":"001","temp":25.3,"humi":60,"ts":1712345678}
两者主要区别如下表所示:
| 特性 | GET | POST |
|---|---|---|
| 数据位置 | URL参数 | 请求体 |
| 安全性 | 低(暴露于日志) | 较高 |
| 缓存支持 | 是 | 否 |
| 数据长度限制 | 受URL长度限制(~2KB) | 几乎无限制 |
| 幂等性 | 是(多次请求效果相同) | 否(可能创建多个资源) |
在51单片机系统中,根据实际需求选择合适方法。例如传感器数据上报推荐使用POST以增强安全性。
5.2.2 请求头字段设置与Content-Type说明
正确的请求头能帮助服务器正确解析数据。常见的头部字段包括:
Host: 目标域名,用于虚拟主机识别;User-Agent: 标识客户端设备类型;Content-Type: 指定正文格式,如application/json或x-www-form-urlencoded;Authorization: 携带Token认证信息。
void build_http_post_request(char *json_data, int data_len) {
uart_send_string("POST /upload HTTP/1.1\r\n");
uart_send_string("Host: api.iotcloud.net\r\n");
uart_send_string("User-Agent: MCU-Client/1.0\r\n");
uart_send_string("Content-Type: application/json\r\n");
char len_str[16];
sprintf(len_str, "Content-Length: %d\r\n", data_len);
uart_send_string(len_str);
uart_send_string("Connection: close\r\n");
uart_send_string("\r\n"); // Header结束
uart_send_string(json_data); // Body
}
逐行解读:
- 第1行定义HTTP动词、路径与版本;
- Host必须填写,否则服务器可能拒绝服务;
- Content-Type决定后端解析方式,错误设置会导致JSON解析失败;
- Connection设为close表示单次请求后关闭连接,节省资源;
- \r\n\r\n 标志头部结束,之后为实体内容。
5.2.3 服务器响应解析与状态码处理(200、404等)
服务器返回的HTTP响应包含状态码与响应体:
HTTP/1.1 200 OK
Content-Type: text/plain
Content-Length: 12
Command:ON
常用状态码含义如下:
| 状态码 | 含义 | 应对措施 |
|---|---|---|
| 200 | 成功 | 解析响应体,执行下一步操作 |
| 400 | 请求错误 | 检查参数格式 |
| 401 | 未授权 | 更新Token或重新登录 |
| 404 | 接口不存在 | 核对URL路径 |
| 500 | 服务器内部错误 | 记录日志,稍后重试 |
可在MCU端编写简易解析器:
uint8_t parse_http_response(char *response) {
if (strstr(response, "HTTP/1.1 200")) {
return HTTP_OK;
} else if (strstr(response, "HTTP/1.1 404")) {
return HTTP_NOT_FOUND;
} else if (strstr(response, "HTTP/1.1 401")) {
return HTTP_UNAUTHORIZED;
}
return HTTP_ERROR;
}
结合环形缓冲区与状态机,可实现流式解析,降低内存占用。
5.3 实现51单片机对云平台的数据上报与指令接收
完整的物联网系统应具备双向通信能力:既能主动上报数据,又能被动接收指令。
5.3.1 向Web服务器发送传感器数据
假设系统每隔30秒采集一次温湿度并通过HTTP POST上传:
void upload_sensor_data() {
float temp = read_temperature();
float humi = read_humidity();
char json[64];
sprintf(json, "{\"temp\":%.2f,\"humi\":%.2f,\"dev\":\"MCU001\"}", temp, humi);
connect_to_server(); // 建立TCP连接
build_http_post_request(json, strlen(json));
send_via_uart(); // 调用AT+CIPSEND发送
wait_for_response("200 OK", 5000); // 等待成功反馈
}
定时任务可由定时器中断驱动:
volatile uint16_t tick_counter = 0;
void timer0_isr() interrupt 1 {
TH0 = 0xD8; // 重载初值(10ms @ 11.0592MHz)
TL0 = 0xEF;
tick_counter++;
if (tick_counter >= 3000) { // 30s
tick_counter = 0;
set_flag(upload_flag);
}
}
5.3.2 接收来自移动端的控制指令并解析
服务器可通过WebSocket或轮询方式下发指令。此处采用短连接轮询:
void check_control_command() {
send_http_get("/cmd?dev=MCU001");
char *resp = receive_response();
if (parse_json_command(resp)) {
execute_local_action(command_type);
}
}
解析JSON示例(简化版):
uint8_t parse_json_command(char *json) {
if (strstr(json, "\"cmd\":\"LED_ON\"")) {
P1 |= 0x01;
return 1;
} else if (strstr(json, "\"cmd\":\"LED_OFF\"")) {
P1 &= ~0x01;
return 1;
}
return 0;
}
5.3.3 心跳包机制保持长连接活跃
为减少频繁建连开销,可维护一个持久TCP连接并定期发送心跳:
void send_heartbeat() {
const char *hb = "GET /ping HTTP/1.1\r\nHost:keepalive.com\r\n\r\n";
uart_send_string("AT+CIPSEND=");
uart_send_int(strlen(hb));
uart_send_string("\r\n");
delay_ms(500);
uart_send_string(hb);
}
配合服务器端的心跳检测,可及时发现断线并触发重连。
5.4 安全增强:HTTPS与数据加密初步探索
尽管ESP8266支持SSL/TLS(部分固件),但在51单片机系统中受限于内存与算力,全面部署HTTPS较为困难。但仍可通过软件手段提升安全性。
5.4.1 SSL/TLS加密通信可行性分析
ESP8266非官方SDK支持 AT+CIPSSLSIZE 和 AT+CIPSTART="SSL" ,但需烧录特殊固件且RAM消耗大。测试表明,SSL握手过程至少占用3KB以上堆空间,对传统51系列(如STC89C52)难以承受。
替代方案:使用中间代理服务器做TLS卸载,MCU仅与内网HTTPS网关通信。
5.4.2 使用Base64编码保护敏感数据
虽不能加密,但可对关键字段进行编码混淆:
char encoded[64];
base64_encode((uint8_t*)"admin:secret123", 15, encoded);
// 结果:YWRtaW46c2VjcmV0MTIz
再结合简单异或加密:
for(int i=0; i<len; i++) {
data[i] ^= 0x5A;
}
虽非绝对安全,但可防普通嗅探。
5.4.3 认证令牌(Token)机制在指令验证中的应用
服务器生成JWT Token,下发给合法用户;设备每次请求携带Token:
GET /data?token=eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9...
MCU端缓存Token并在请求中附带,服务器验证有效性后再处理请求,防止非法访问。
graph TD
A[手机APP] -->|登录获取Token| B(Auth Server)
B --> C{Token有效?}
C -->|是| D[下发至MCU]
D --> E[MCU带Token请求数据]
E --> F[Server验证Token]
F --> G[返回响应]
综上所述,即使在资源受限环境下,也能通过合理设计实现基本的安全防护体系。
6. 物联网无线控制系统全流程实战与优化
6.1 系统整体架构设计与功能模块划分
在完成硬件搭建、通信配置及协议实现的基础上,本节将构建一个完整的物联网无线控制系统。系统以STC89C52RC单片机为核心控制器,协同ESP8266-01S模块接入Wi-Fi网络,并通过TCP协议与远程终端(如手机APP或Web服务器)进行双向通信,最终实现LED灯的远程开关控制和环境温湿度数据上报。
系统采用分层架构设计,主要包括以下功能模块:
| 模块名称 | 功能描述 |
|---|---|
| 主控逻辑模块 | 负责协调各子模块运行,执行状态判断与流程调度 |
| UART通信模块 | 实现51单片机与ESP8266之间的串口数据收发 |
| Wi-Fi连接管理 | 处理ESP8266的STA模式连接、断线检测与重连 |
| 数据采集模块 | 读取DHT11传感器数据,封装为JSON格式上传 |
| 远程指令解析 | 接收并解析来自服务器的控制命令(如 {"cmd":"ON"} ) |
| 执行输出模块 | 控制GPIO引脚驱动LED或其他负载设备 |
| 日志与调试接口 | 通过串口打印关键状态信息,便于开发调试 |
主程序采用轮询+中断混合结构,其核心流程图如下所示(使用mermaid格式绘制):
graph TD
A[系统上电初始化] --> B[配置UART波特率9600]
B --> C[启动DHT11传感器检测]
C --> D[发送AT指令使ESP8266进入STA模式]
D --> E{是否成功连接Wi-Fi?}
E -- 是 --> F[获取IP地址并建立TCP连接]
E -- 否 --> D
F --> G[进入主循环]
G --> H[定时采集温湿度数据]
H --> I[封装为HTTP POST请求发送至云平台]
I --> J[监听串口是否有下行指令]
J --> K{收到有效指令?}
K -- 是 --> L[执行对应动作(如点亮LED)]
K -- 否 --> M[延时1秒继续循环]
M --> G
主控代码的关键部分如下(C语言,Keil C51环境):
void main() {
System_Init(); // 初始化IO、UART、Timer等资源
ESP8266_Send_AT("AT+CWMODE=1"); // 设置为STA模式
delay_ms(1000);
ESP8266_Send_AT("AT+CWJAP=\"YourSSID\",\"YourPASS\""); // 连接路由器
while(!Check_WiFi_Connected()) { // 循环检测连接状态
retry_count++;
if(retry_count > 5) {
ESP8266_Reset(); // 自动复位重试
retry_count = 0;
}
delay_ms(2000);
}
ESP8266_Start_TCP("192.168.1.100", 8080); // 连接到本地服务器
while(1) {
Read_DHT11(&temp, &humi); // 读取传感器数据
Send_HTTP_Post(temp, humi); // 发送数据到服务器
if(UART1_Recv_Ready()) {
Parse_Incoming_Command(); // 解析远程指令
}
delay_ms(5000); // 每5秒上报一次
}
}
参数说明:
- System_Init() :初始化系统时钟、串口、定时器等。
- ESP8266_Send_AT() :向ESP8266发送AT指令,支持自动等待响应。
- Check_WiFi_Connected() :通过AT+CIFSR指令查询是否已分配IP。
- Send_HTTP_Post() :构造标准HTTP报文,内容类型为 application/json 。
编译生成HEX文件后,使用ISP烧录工具(如STC-ISP)将程序写入51单片机。烧录步骤如下:
1. 关闭电源,短接P3.0与下载器RXD;
2. 打开STC-ISP软件,选择MCU型号为STC89C52RC;
3. 加载hex文件,设置波特率为115200;
4. 给系统上电,自动触发下载流程;
5. 下载成功后断电重启,进入正常运行模式。
该架构具备良好的可扩展性,后续可通过添加更多传感器或执行器实现智能家居网关功能。
简介:本实验项目介绍如何利用经典51单片机与高性能ESP8266 WiFi模块实现远程无线控制功能。通过UART串行通信,51单片机发送AT指令配置ESP8266连接WiFi网络,并基于TCP/IP协议实现数据传输与远程指令响应。项目涵盖硬件连接、AT命令配置、单片机编程、HEX文件烧录及系统调试等完整流程,适用于物联网基础开发学习。实验内容包含电路设计、通信协议应用与安全优化策略,帮助开发者掌握嵌入式系统联网核心技术,为后续智能控制项目奠定实践基础。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 14
14 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)