
EtherCAT 运动控制:LabVIEW 实时系统下的高效解决方案
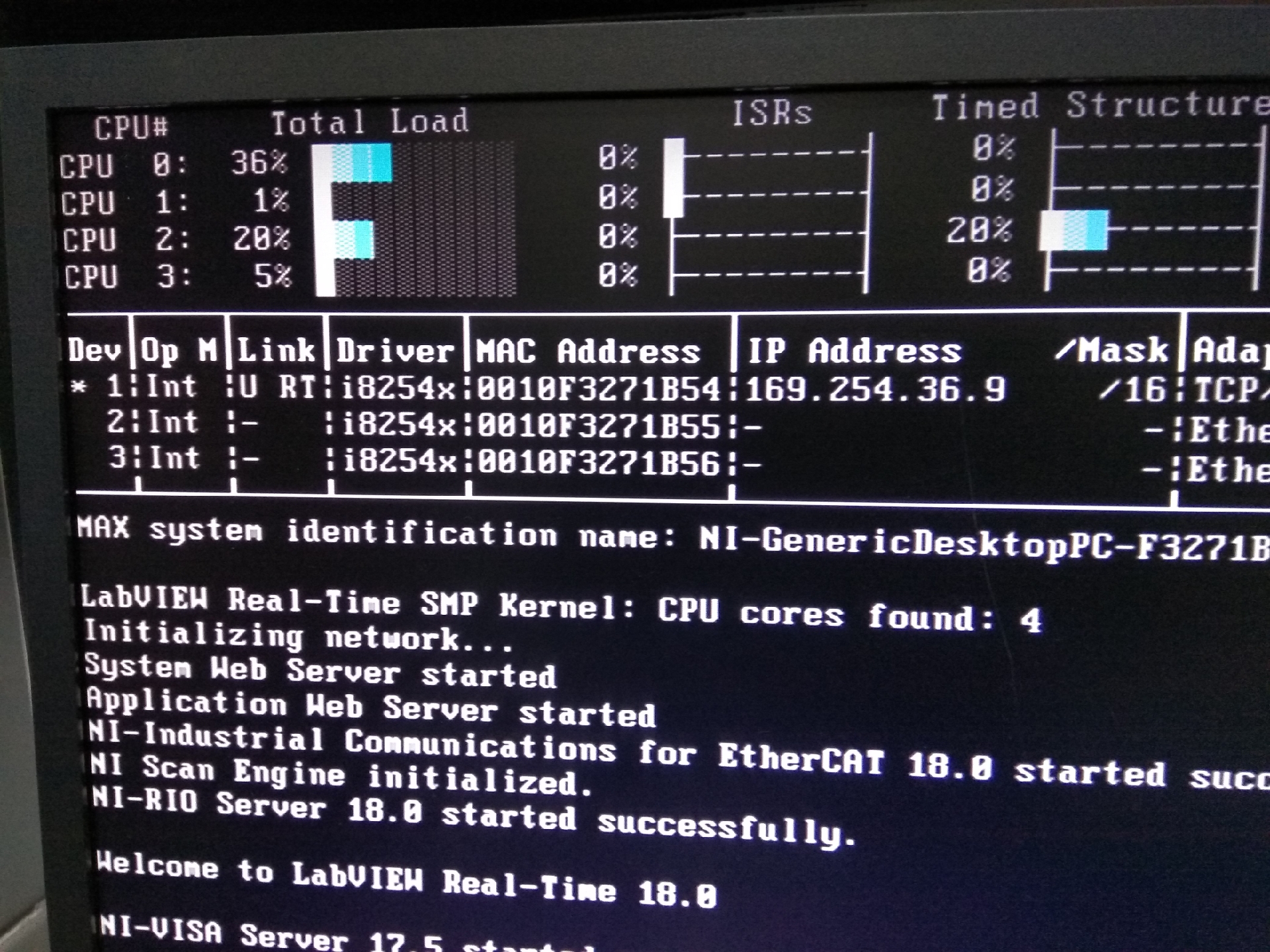
ethercat运动控制ethercat总线ethercat高速总线labview实时系统美国NI实时系统高精度实时运动控制器高精度实时ethercat主站图形化编程生成rtexe,自动下载到控制器运行,类似于软PLC功能,比传统plc强大的是,多通讯接口http,opc,net,快速构建上下位机程序,支持视觉,采集卡。兼容性特别好,系统,控制器,伺服,总线,都是不同厂商,但能同步周期能到250微
ethercat运动控制 ethercat总线 ethercat高速总线 labview实时系统 美国NI实时系统 高精度实时运动控制器 高精度实时ethercat主站 图形化编程生成rtexe,自动下载到控制器运行,类似于软PLC功能,比传统plc强大的是,多通讯接口http,opc,net,快速构建上下位机程序,支持视觉,采集卡。 兼容性特别好,系统,控制器,伺服,总线,都是不同厂商,但能同步周期能到250微秒。

在工业自动化领域,高精度实时运动控制一直是核心需求。而 EtherCAT 总线以其高速、高效的特性,成为了众多自动化项目的首选通信方式。今天,咱们就来唠唠 EtherCAT 运动控制结合 LabVIEW 实时系统带来的那些强大功能。
EtherCAT 总线——高速的基石
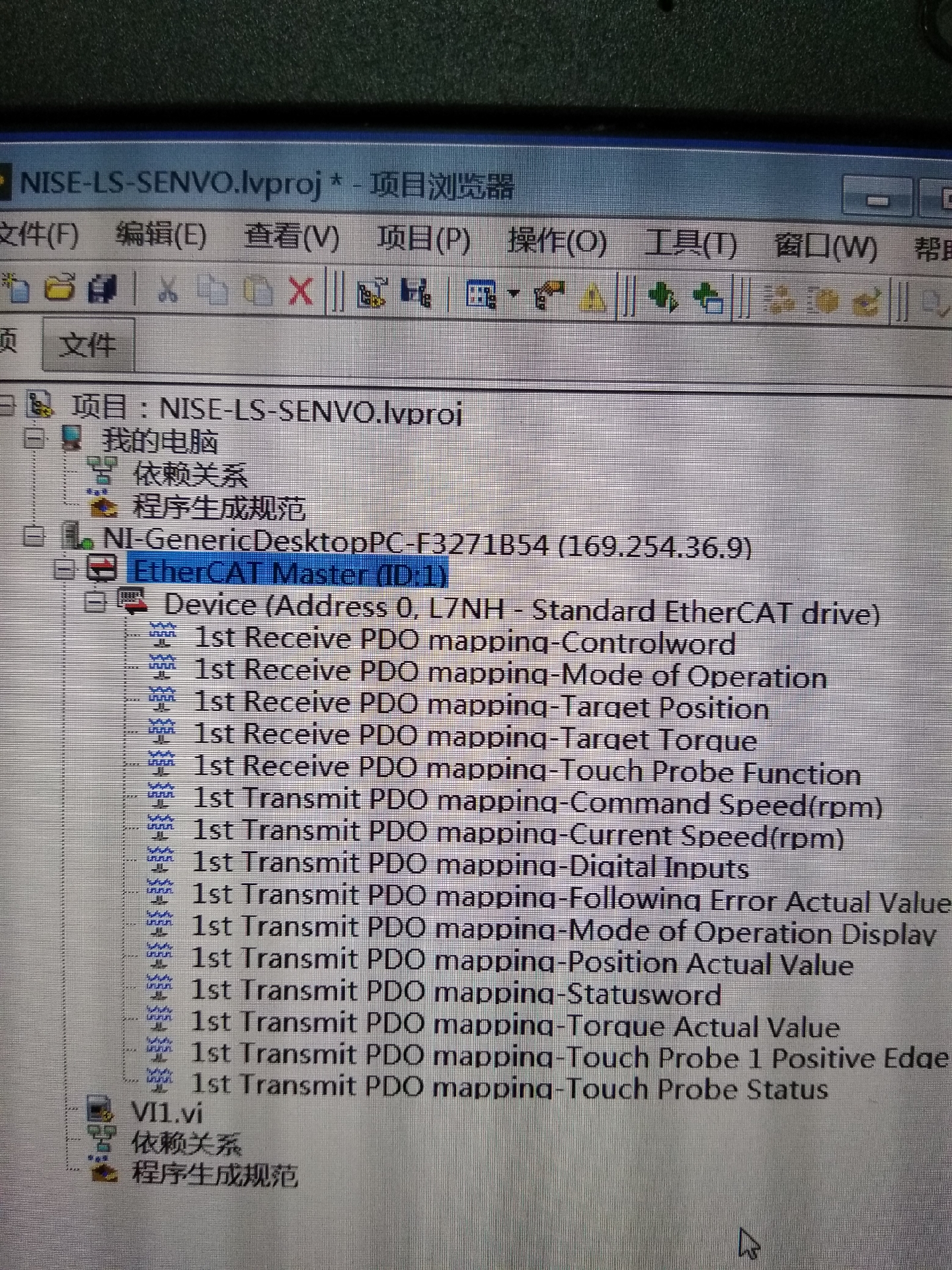
EtherCAT 是一种高速工业以太网现场总线,它能够实现极高的数据传输速率和极短的响应时间。与传统的现场总线相比,EtherCAT 可以在短时间内完成大量设备的通信,这对于高精度实时运动控制来说至关重要。例如,在一个包含多个轴的运动控制系统中,每个轴的电机驱动器都通过 EtherCAT 总线连接,主站可以快速地向各个从站发送运动指令,并且实时获取反馈信息,确保每个轴的运动都能精确同步。
LabVIEW 实时系统与美国 NI 实时系统
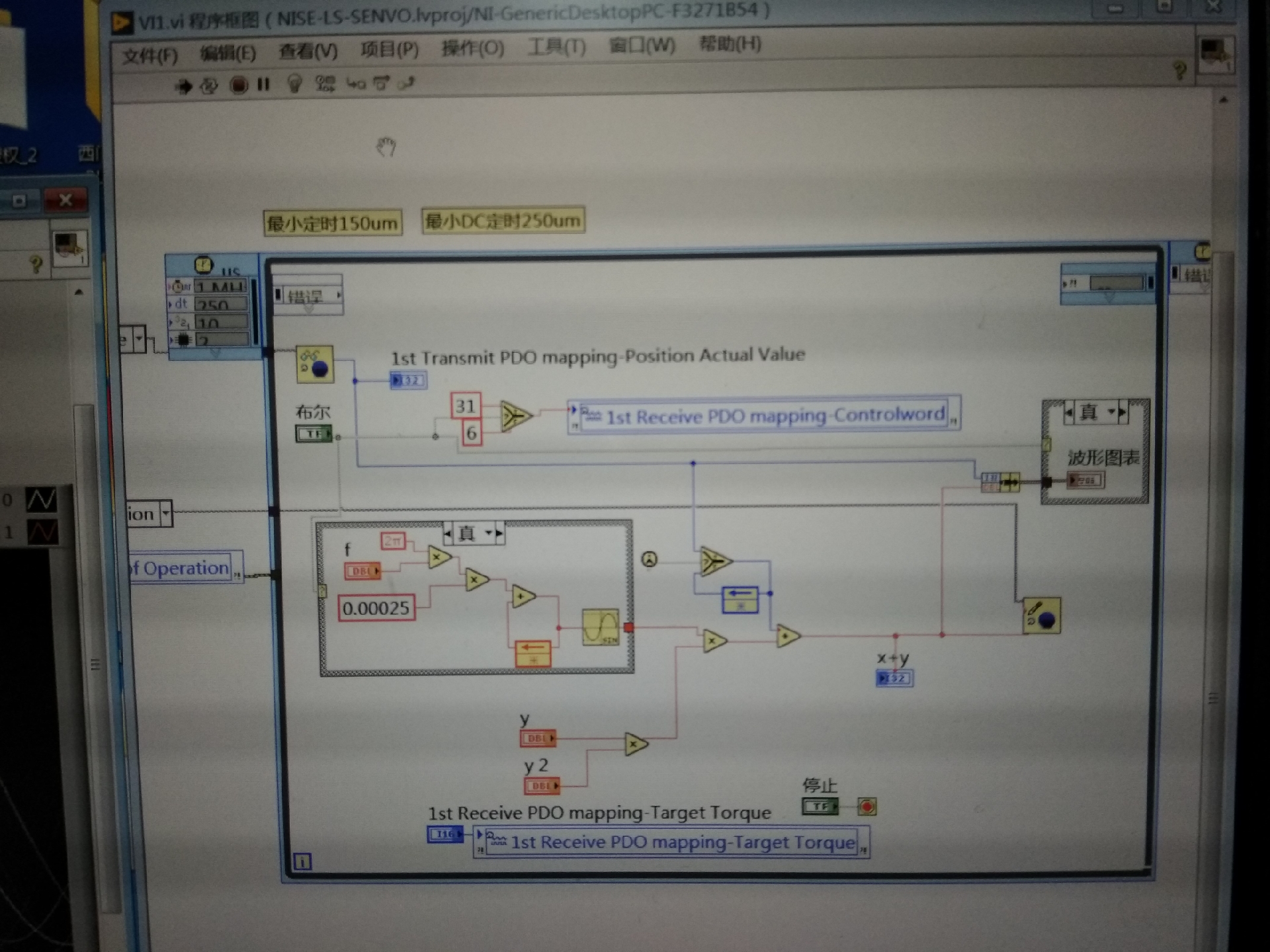
LabVIEW 作为图形化编程的佼佼者,与美国 NI 实时系统相结合,为我们搭建了一个强大的开发平台。LabVIEW 的图形化编程方式使得开发人员无需编写大量复杂的代码,就能轻松实现各种功能。就像我们可以通过简单的拖拽和连线操作,快速构建一个运动控制程序。
// 简单的 LabVIEW 运动控制代码示意(以设置轴速度为例)
// 这里只是简单示意,实际可能涉及更多复杂设置
// 创建一个 VI(虚拟仪器)
// 在前面板添加一个数值控件用于设置速度
// 在程序框图中连接数值控件到运动控制函数
// 运动控制函数(假设为 NI 提供的特定函数)
// 配置轴参数,然后设置速度
// 示例代码片段(LabVIEW 图形化代码,这里以文本形式简单描述逻辑)
// 首先获取轴的句柄
AxisHandle = GetAxisHandle(AxisNumber);
// 设置速度
SetAxisVelocity(AxisHandle, DesiredVelocity);这段代码展示了如何在 LabVIEW 中通过简单的函数调用设置轴的速度。首先获取轴的句柄,这是操作轴的关键标识,然后使用这个句柄调用设置速度的函数,将我们期望的速度值传递进去。
高精度实时 EtherCAT 主站与运动控制器
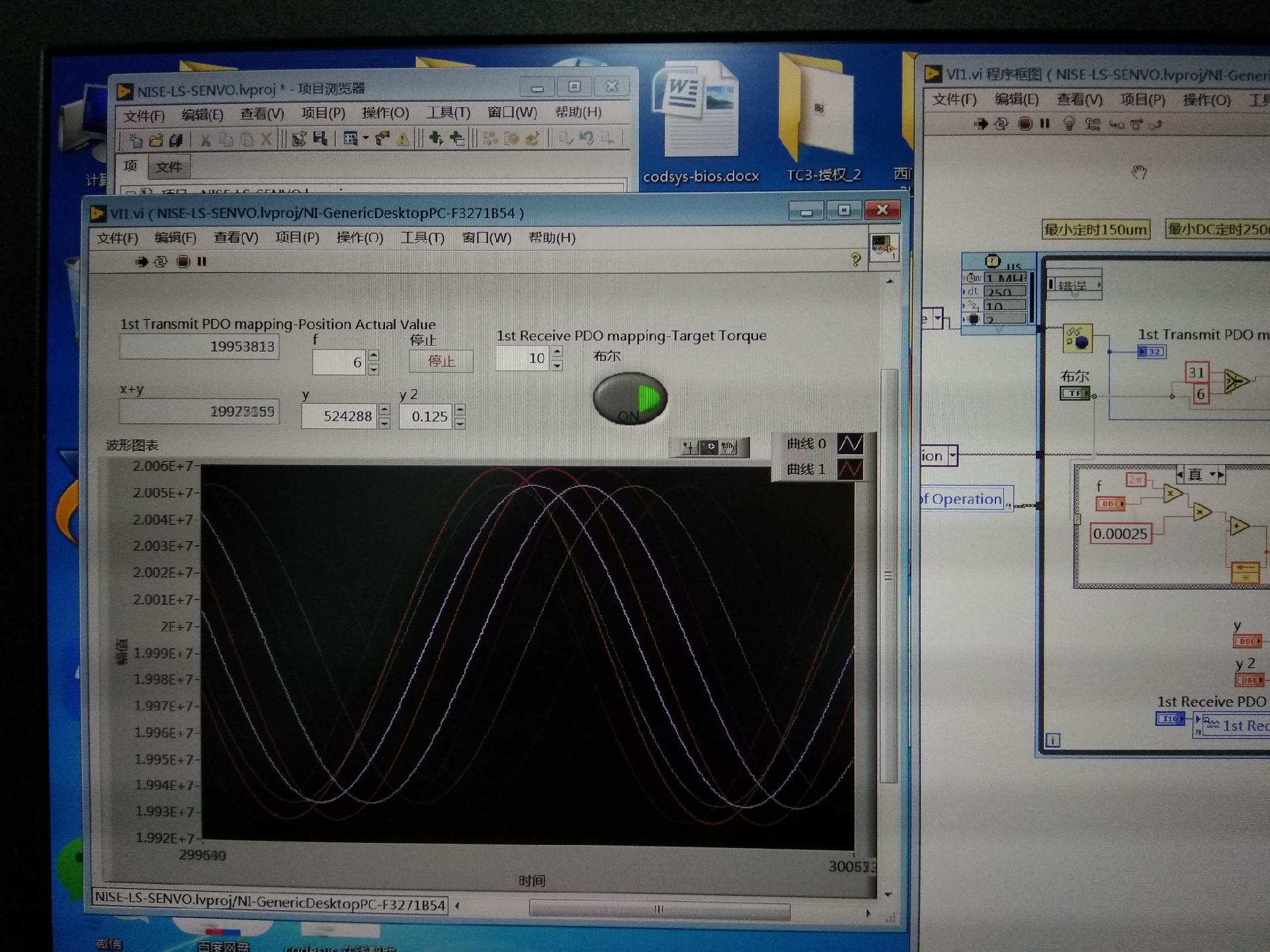
高精度实时 EtherCAT 主站搭配高精度实时运动控制器,简直就是绝配。它们能确保系统在高速运行的同时,保持极高的运动控制精度。通过 LabVIEW 的图形化编程,我们可以生成 rtexe 文件,这个文件就像软 PLC 的程序一样,可以自动下载到控制器运行。
ethercat运动控制 ethercat总线 ethercat高速总线 labview实时系统 美国NI实时系统 高精度实时运动控制器 高精度实时ethercat主站 图形化编程生成rtexe,自动下载到控制器运行,类似于软PLC功能,比传统plc强大的是,多通讯接口http,opc,net,快速构建上下位机程序,支持视觉,采集卡。 兼容性特别好,系统,控制器,伺服,总线,都是不同厂商,但能同步周期能到250微秒。
相比于传统 PLC,它的优势非常明显。多通讯接口如 http、opc、net 的支持,让我们能够快速构建上下位机程序。比如说,通过 http 接口,上位机可以方便地与远程服务器进行数据交互,实现远程监控和控制。而 OPC 接口则可以与其他符合 OPC 标准的设备进行数据共享,极大地拓展了系统的兼容性和功能性。
// 简单示例代码展示如何通过 HTTP 接口发送数据(假设使用 C#语言)
using System;
using System.Net.Http;
class Program
{
static async System.Threading.Tasks.Task Main()
{
using (HttpClient client = new HttpClient())
{
// 假设要发送的数据
string data = "{\"axisPosition\": 100}";
HttpResponseMessage response = await client.PostAsync("http://yourserver.com/api/motiondata", new StringContent(data));
if (response.IsSuccessStatusCode)
{
Console.WriteLine("Data sent successfully");
}
else
{
Console.WriteLine("Failed to send data");
}
}
}
}这段 C#代码展示了如何通过 HttpClient 向指定的 HTTP 服务器发送运动数据。首先创建一个 HttpClient 实例,然后准备要发送的数据,以 JSON 格式为例,最后使用 PostAsync 方法将数据发送到指定的 API 地址。根据服务器返回的状态码判断数据是否发送成功。
强大的兼容性
这套系统的兼容性特别好。即使系统、控制器、伺服、总线来自不同厂商,它依然能实现惊人的同步周期——250 微秒。这意味着各个设备之间可以精确地协同工作,无论是复杂的多轴联动,还是与视觉系统、采集卡等外部设备的配合,都能做到无缝对接。比如在一个自动化生产线上,视觉系统通过采集卡获取产品图像信息,然后将位置数据通过 EtherCAT 总线传递给运动控制器,运动控制器根据这些数据精确控制机械臂的运动,完成产品的抓取和放置动作,整个过程在极短的同步周期内高效完成。
综上所述,EtherCAT 运动控制结合 LabVIEW 实时系统,为我们提供了一个功能强大、灵活且兼容性高的自动化解决方案,必将在未来的工业自动化领域发挥更加重要的作用。


openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 16
16 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)