
day4(IMX6ULL)<时钟>
本文介绍了ARM架构的时钟系统和定时器模块。时钟系统包含晶体振荡器、PLL锁相环、分频器等组件,通过时钟树为系统提供精确时序基准。文章详细讲解了时钟初始化流程,包括内核时钟配置、PLL倍频、分频器设置等关键步骤。定时器部分重点分析了EPIT周期中断定时器和GPT通用定时器的工作原理,并提供了1秒中断LED翻转和微秒级延时函数的实现代码。这些时钟和定时器组件是嵌入式系统实现精确时序控制和优化功耗的核
一、时钟系统基础
1.1 基本概念
- 时钟(clock):在电子系统中是一个产生稳定、周期性振荡信号的电路或组件。这个信号像节拍器或心跳一样,为数字电路中的各种操作提供同步时序基准。
- 定时器(EPIT GPT):是一个通过对已知频率的时钟信号进行计数,来实现定时、延时或事件计数功能的硬件模块或软件机制。
- 实时时钟(RTC, real time clock):是微处理器中的一个功能模块,用于在系统主电源关闭的情况下,继续提供精确的日历和时间信息。
1.2 时钟系统核心组件
1.2.1 时钟源
时钟源是整个时钟系统的起点,提供稳定的原始时钟信号。
- 晶体振荡器:将石英晶体切割成音叉,施加电压产生稳定震荡
- 通常使用 8MHz 或 24MHz 的晶振作为基础时钟源
1.2.2 时钟树关键组件
ARM架构的时钟系统由多个关键组件构成,形成一个复杂的时钟树:
| 组件 | 作用 | 示例代码 |
|---|---|---|
| PLL(锁相环) | 倍频,将低频时钟提升到更高频率 | CCM_ANALOG->PLL_ARM |
| Prescale(分频器) | 分频,将高频时钟降低到所需频率 | CCM->CACRR |
| PFD(相位分数分频器) | 输出频率可升可降,提供更灵活的频率选择 | CCM_ANALOG->PFD_528 |
| MUX(多路选择器) | 选择不同的时钟源 | CCM->CBCMR、CCM->CSCMR1 |
| CG门(Clock Gating | 控制时钟门控,节省功耗 | CCM->CCGR0-CCM->CCGR6 |
二、时钟系统代码实现
2.1 关键时钟计算
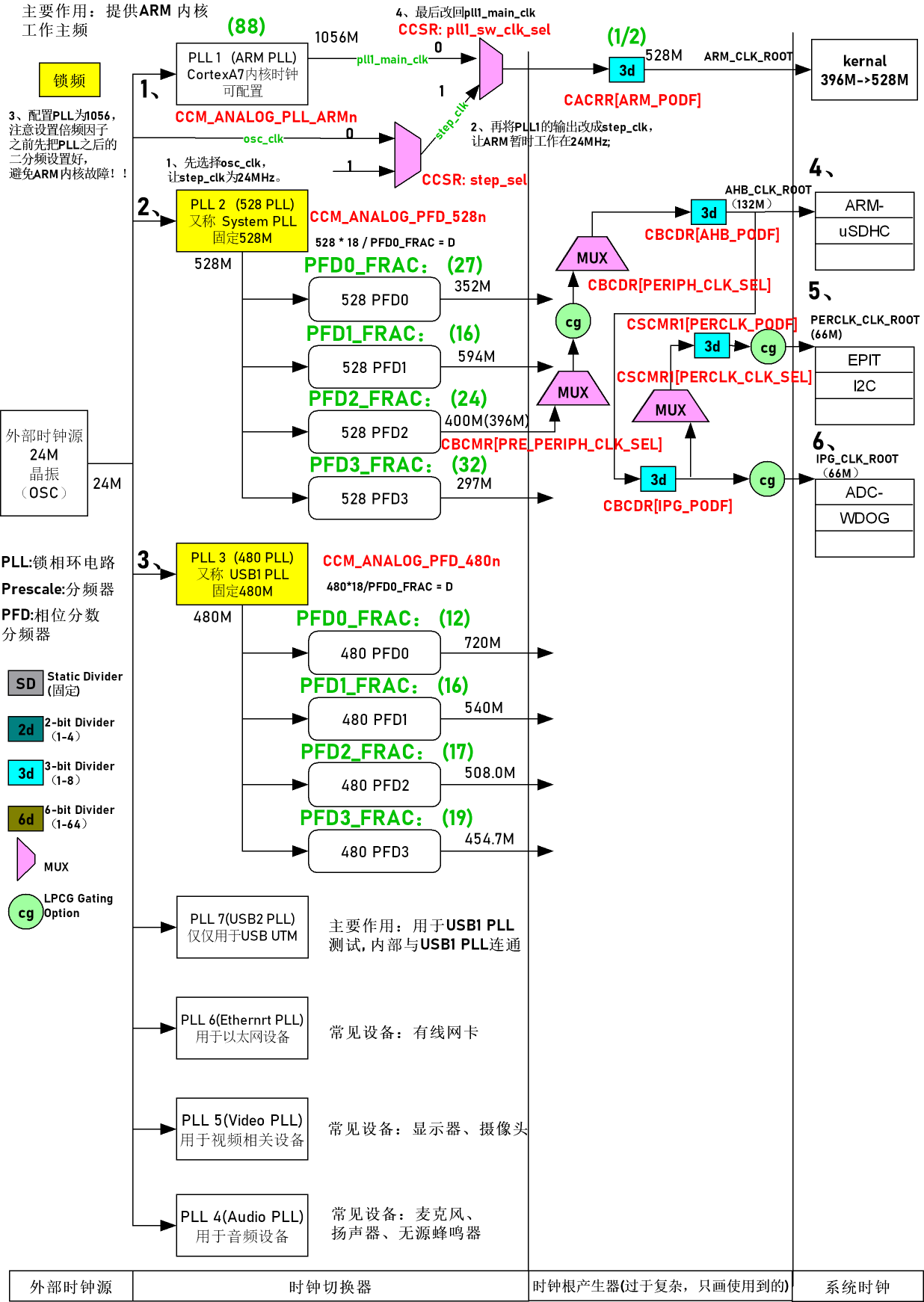
- ARM 内核时钟:通过PLL倍频提升到高频率。
PLL1 倍频系数 88(24MHz×88=2112MHz)→ 二分频 → 1056MHz(可通过 CACRR 寄存器调整分频系数);
- AHB 总线时钟:系统总线时钟,用于处理器和外设。
PLL2 输出 528MHz → 4 分频 → 132MHz(CBCDR 寄存器的 AHB_PODF 配置);
- IPG 总线时钟:外设接口时钟,用于GPIO、UART等外设。
AHB 时钟 132MHz → 2 分频 → 66MHz(CBCDR 寄存器的 IPG_PODF 配置);
- PERCLK时钟:外设时钟,用于定时器、ADC等。
AHB 时钟 132MHz → 2 分频 → 66MHz(CSCMR1 寄存器的 PERCLK_PODF 配置)。
2.2 时钟初始化
void clock_init(void)
{
// ARM内核时钟切换(避免配置PLL时内核故障)
CCM->CCSR &= ~(1 << 8); // 选择osc_clk作为step_clk(24MHz)
CCM->CCSR |= (1 << 2); // 让ARM暂时工作在step_clk(24MHz)
// 配置ARM内核分频器(CACRR)
CCM->CACRR &= ~(7 << 0);
CCM->CACRR |= (1 << 0); // 二分频(后续PLL1输出1056MHz,分频后528MHz)
// 配置PLL1(ARM PLL)为1056MHz
unsigned int t = CCM_ANALOG->PLL_ARM;
t &= ~(3 << 4); // 清除原有倍频系数
t |= (1 << 13); // 使能PLL
t &= ~(0x7F << 0);
t |= (88 << 0); // 倍频系数88(24×88=2112MHz,二分频后1056MHz)
CCM_ANALOG->PLL_ARM = t;
CCM->CCSR &= ~(1 << 2); // 切换回PLL1输出(pll1_main_clk)
// 配置PLL2(528MHz)的PFD分频器
t = CCM_ANALOG->PFD_528;
t &= ~((0x3F << 0) | (0x3F << 8) | (0x3F << 16) | (0x3F << 24));
// PFD0=27→352M,PFD1=16→594M,PFD2=24→396M,PFD3=32→297M
t |= ((27 << 0) | (16 << 8) | (24 << 16) | (32 << 24));
CCM_ANALOG->PFD_528 = t;
// 配置PLL3(480MHz)的PFD分频器
t = CCM_ANALOG->PFD_480;
t &= ~((0x3F << 0) | (0x3F << 8) | (0x3F << 16) | (0x3F << 24));
t |= ((27 << 0) | (16 << 8) | (24 << 16) | (32 << 24));
CCM_ANALOG->PFD_480 = t;
// 配置AHB_CLK_ROOT(132M)
t = CCM->CBCMR;
t &= ~(3 << 18);
t |= (1 << 18); // 选择PLL2_PFD2(396M)作为输入
CCM->CBCMR = t;
t = CCM->CBCDR;
t &= ~(1 << 25);
t &= ~(7 << 10);
t |= (2 << 10); // AHB分频系数3(396M/3=132M)
CCM->CBCDR = t;
// 配置IPG_CLK_ROOT(66M)
t &= ~(3 << 8);
t |= (1 << 8); // IPG分频系数2(132M/2=66M)
CCM->CBCDR = t;
// 配置PERCLK_CLK_ROOT(66M)
t = CCM->CSCMR1;
t &= ~(1 << 6); // 选择IPG_CLK_ROOT作为输入
t &= ~(0x3F << 0); // 不分频
CCM->CSCMR1 = t;
// 使能所有外设时钟门控(CG)
clock_cg_init();
}时钟配置关键注意事项:
- 时钟切换顺序:配置 PLL1 时,必须先将 ARM 内核切换到 24MHz 的 step_clk,避免倍频过程中内核因时钟突变而故障;
- 分频系数匹配:外设时钟必须与器件手册要求一致(如 USB 需 480MHz,以太网需特定频率),否则会导致外设工作异常;
- 时钟门控使能:clock_cg_init() 函数将所有 CCGR 寄存器置为 0xFFFFFFFF,即开启所有外设时钟,实际项目中可按需关闭未使用外设的时钟以降低功耗。
三、定时器模块详解
3.1 EPIT 定时器
Enhanced Periodic Interrupt Timer —— 增强型周期中断定时器
应用场景:周期性任务,如 1 秒翻转一次 LED。
工作原理:
- 定时器根据配置的时钟源进行计数。
- 当计数达到 LR (Load Register) 设定的值时,产生中断,并将计数器自动重置为 LR 值。
实验:1秒中断翻转 LED
使用 PERCLK_CLK_ROOT (66MHz) 作为时钟源。
- 目标频率:1Hz(即每1秒一次)。
- 1秒中断的计算:1000 * 1000 = 1MHz(1MHz时钟,100万计数=1秒)
- 代码实现:
void epit1_init(void)
{
unsigned int t;
t = EPIT1->CR;
t &= ~(3 << 24); // 清除时钟源选择
t |= (1 << 24); // 选择PERCLK_CLK_ROOT(66M)作为时钟源
t |= (1 << 17); // 覆盖计数器值
t &= ~(0xFFF << 4); // 清除预分频值
t |= (65 << 4); // 分频系数66(66M/66=1MHz)
t |= (1 << 3); // 计数器达到零时,从模数寄存器重新加载(置位-遗忘模式)
t |= (1 << 2); // 启用中断
t |= (1 << 1); // 从加载值开始计数
EPIT1->CR = t;
EPIT1->LR = 1000 * 1000; // 载入值 = 1MHz时钟,1秒
EPIT1->CMPR = 0; // 比较寄存器
EPIT1->CNR = 1000 * 1000; // 当前计数值
// 中断配置
GIC_EnableIRQ(EPIT1_IRQn);
GIC_SetPriority(EPIT1_IRQn, 0);
system_interrupt_register(EPIT1_IRQn, epit_irq_handler);
EPIT1->CR |= (1 << 0); // 使能定时器
}
// 中断服务函数:1s翻转LED和蜂鸣器
void epit_irq_handler(void)
{
if ((EPIT1->SR & (1 << 0)) != 0)
{
led_nor();
beep_nor();
EPIT1->SR |= (1 << 0); // 清除中断标志
}
}3.2 GPT定时器
General Purpose Timer —— 通用目的定时器
应用场景:高精度延时函数。
工作原理:GPT 支持自由运行模式、输入捕获和比较输出。我们利用其自由运行模式读取当前计数值来实现软件延时。
实验:精准延时
通过读取 GPT1->CNT 寄存器,对比当前值与上一次的值,累加时间差,直到达到所需的微秒数。
- 代码实现:
void gpt1_init(void) { // 复位定时器 reset_fun(); unsigned int t; t = GPT1->CR; t &= ~(7 << 26); // 输出断开 t &= ~(3 << 18); // 捕获已禁用 t |= (1 << 9); // 自由运行模式 t &= ~(7 << 6); // 清除时钟源选择 t |= (1 << 6); // 选择PERCLK_CLK_ROOT(66M)作为时钟源 t &= ~(1 << 1); // 失能定时器后保留原来的值 GPT1->CR = t; GPT1->PR &= ~(0xFFF << 0); // 清除预分频值 GPT1->PR |= (65 << 0); // 分频系数66(66M/66=1MHz) GPT1->CNT = 0; // 清零计数器 GPT1->CR |= (1 << 0); // 使能定时器 } // 微秒级延时函数 void delay_us(unsigned int us) { unsigned int count = 0; unsigned int old_count = 0, new_count = 0; old_count = GPT1->CNT; // 记录起始时刻 while (1) { new_count = GPT1->CNT; // 计算溢出情况(例如从0xFFFFFFFF变到0) if (new_count != old_count) { if (new_count > old_count) { count += new_count - old_count; } else { count += 0xFFFFFFFF - old_count + new_count; } } if (count >= us) { return; } old_count = new_count; } }四、总结
ARM架构的时钟系统和定时器模块是嵌入式系统设计的核心组件。理解时钟树的结构和工作原理,对于实现精确的定时控制、优化系统功耗和性能至关重要。
- 时钟系统:通过PLL、分频器和多路选择器构建复杂的时钟树,为系统提供精确的时序基准
- 定时器:EPIT提供精确的周期中断,GPT提供灵活的延时功能,两者在嵌入式系统中广泛应用
- 配置实践:通过寄存器配置,实现时钟频率的精确控制和定时器的精准工作

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 8
8 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)