
深度定制S32K144与S32K148:从Boot到标定的全方位解决方案
S32k144,S32K148的boot,网络,uds,标定程序订做,包含uds烧写上位机在汽车电子和嵌入式系统开发领域,NXP的S32K144和S32K148芯片凭借其高性能和丰富的外设,成为众多开发者的心头好。今天就来聊聊针对这两款芯片的Boot、网络、UDS以及标定程序的定制开发,并且还包含UDS烧写上位机哦。
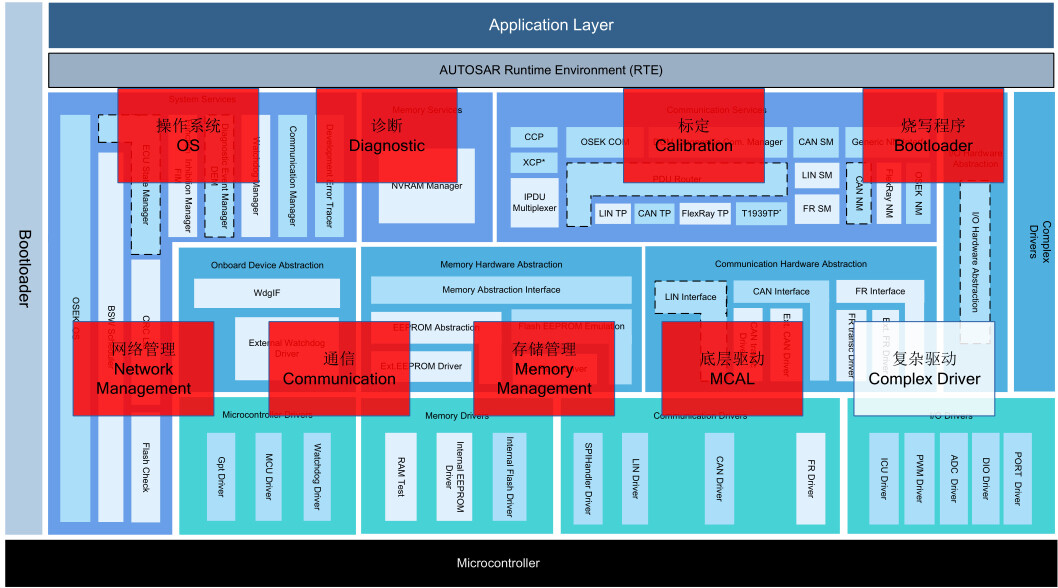
S32k144,S32K148的boot,网络,uds,标定程序订做,包含uds烧写上位机
在汽车电子和嵌入式系统开发领域,NXP的S32K144和S32K148芯片凭借其高性能和丰富的外设,成为众多开发者的心头好。今天就来聊聊针对这两款芯片的Boot、网络、UDS以及标定程序的定制开发,并且还包含UDS烧写上位机哦。
Boot程序:系统启动的基石
Boot程序,就像是芯片启动的引路人,在系统上电时首先运行。它负责初始化硬件,为后续操作系统或应用程序的运行搭建好基础环境。
代码示例(以S32K144为例,简单示意初始化Flash部分)
#include "S32K144.h"
void boot_init_flash(void) {
// 解锁Flash控制器
FTFL_FMS->FSEC = FTFL_FMS_FSEC_KEY(0xC520) | FTFL_FMS_FSEC_KEY(0xD928);
// 配置Flash时钟
SIM_SCGC6 |= SIM_SCGC6_FTFE_MASK;
// 这里可以继续添加更多关于Flash配置,如设置等待状态等
}代码分析
这段代码的第一步是解锁Flash控制器,通过向FTFL_FMS->FSEC寄存器写入特定的密钥值来完成。解锁后才能对Flash进行配置操作。接着,使能Flash时钟,为后续对Flash的读写操作做好准备。不同芯片可能在寄存器地址和配置方式上略有差异,但基本思路一致。
网络功能:数据交互的桥梁
在现代嵌入式系统中,网络功能不可或缺。无论是车内的CAN网络,还是用于远程通信的以太网等,都需要精心配置。
CAN网络初始化代码示例(S32K148)
#include "S32K148.h"
void can_init(void) {
// 使能CAN时钟
SIM_SCGC6 |= SIM_SCGC6_CAN0_MASK;
// 配置CAN引脚复用
PORTB_PCR18 = PORT_PCR_MUX(2);
PORTB_PCR19 = PORT_PCR_MUX(2);
// 初始化CAN控制器
CAN0_MCR = CAN_MCR_MDIS(0) | CAN_MCR_FRZ(0);
CAN0_BTR = CAN_BTR_SJW(0x01) | CAN_BTR_BRP(0x13) | CAN_BTR_TS2(0x04) | CAN_BTR_TS1(0x08);
}代码分析
首先使能CAN0模块的时钟,这是让CAN模块能正常工作的前提。然后设置CAN引脚的复用功能,将引脚配置为CAN功能模式。最后对CAN控制器进行初始化,CAN0MCR寄存器设置CAN模块工作模式,这里取消了模块禁用和冻结模式。CAN0BTR寄存器则配置了CAN总线的波特率、同步跳转宽度等重要参数。
UDS:诊断服务的核心
统一诊断服务(UDS)在汽车电子诊断领域占据核心地位。它定义了一套标准的诊断通信协议,方便不同厂家的设备进行交互。
UDS服务代码示例(简单的读取故障码服务示意)
#include "uds.h"
void uds_read_dtc(void) {
uint8_t response[8];
// 构建请求报文
uint8_t request[8] = {0x19, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
// 通过CAN发送请求
can_send_message(request, 8);
// 等待响应
while (!can_receive_message(response, 8));
// 处理响应
if (response[0] == 0x59 && response[1] == 0x02) {
// 成功收到响应,解析故障码
// 这里简单示例,实际可能需要更复杂解析
uint16_t dtc = (response[2] << 8) | response[3];
printf("Read DTC: 0x%04X\n", dtc);
} else {
printf("UDS read DTC failed\n");
}
}代码分析
这段代码首先构建了一个UDS读取故障码的请求报文,格式遵循UDS协议规范。然后通过之前初始化好的CAN网络发送请求,并等待接收响应。接收到响应后,检查响应报文的格式,如果符合预期则解析出故障码并打印,否则提示读取失败。
标定程序:参数调校的利器
标定程序允许开发者在不修改代码的情况下,动态调整系统的参数,对于汽车发动机控制、底盘调校等应用至关重要。
简单标定变量访问代码示例
#include "calibration.h"
// 定义一个可标定变量
volatile float fuel_injection_time __attribute__((section(".cal")));
void update_fuel_injection(void) {
// 根据其他传感器数据和标定变量计算喷油时间
float new_time = calculate_fuel_time(sensor_data, fuel_injection_time);
fuel_injection_time = new_time;
}代码分析
这里定义了一个fuelinjectiontime变量,并通过attribute((section(".cal")))将其放置在特定的标定段。在updatefuelinjection函数中,根据传感器数据和当前标定的喷油时间计算新的喷油时间,并更新该变量。实际的标定系统还会涉及到与上位机的通信,以便远程调整这些变量。
UDS烧写上位机:便捷的烧写工具
UDS烧写上位机是整个开发流程中的重要一环。它通过UDS协议与目标芯片进行通信,实现程序的烧写更新。可以使用Python结合相关库(如python-can)来开发上位机工具。
Python上位机烧写代码简单示例
import can
bus = can.interface.Bus(bustype='socketcan', channel='can0', bitrate=500000)
def uds_flash_write(data):
# 构建UDS烧写请求报文
request = can.Message(arbitration_id=0x7E0, data=data, is_extended_id=False)
bus.send(request)
# 处理响应
response = bus.recv(timeout=1)
if response and response.arbitration_id == 0x7E8:
print("Flash write response received")
else:
print("Flash write failed, no response")代码分析
这段Python代码使用python-can库初始化了一个CAN总线对象。udsflashwrite函数构建了一个UDS烧写请求报文并通过CAN总线发送,然后等待接收响应。根据响应判断烧写操作是否成功。
S32k144,S32K148的boot,网络,uds,标定程序订做,包含uds烧写上位机
针对S32K144和S32K148芯片的Boot、网络、UDS和标定程序的定制开发,涵盖了从底层硬件初始化到上层应用功能实现,以及配套上位机工具开发的全方位内容。每一个环节都紧密相连,共同打造出一个高效、可靠的嵌入式系统解决方案。希望这篇博文能给正在进行相关开发的小伙伴们一些启发和帮助。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 16
16 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)