
FreeRTOS的任务优先级设计和实现原则
FreeRTOS的任务优先级是其调度器的核心机制,理解它对于构建稳定、高效的实时系统至关重要。任务优先级决定了在多个任务就绪时,哪一个任务优先获得CPU的执行权。FreeRTOS的任务优先级机制,其核心在于通过数值高低决定调度顺序,并结合抢占与时间片来实现复杂的调度策略。成功应用它的关键在于合理规划优先级层次、善用阻塞机制以及使用互斥量等机制避免优先级反转。
目录
概述
FreeRTOS的任务优先级是其调度器的核心机制,理解它对于构建稳定、高效的实时系统至关重要。任务优先级决定了在多个任务就绪时,哪一个任务优先获得CPU的执行权。FreeRTOS的任务优先级机制,其核心在于通过数值高低决定调度顺序,并结合抢占与时间片来实现复杂的调度策略。成功应用它的关键在于合理规划优先级层次、善用阻塞机制以及使用互斥量等机制避免优先级反转。
1 核心规则与特点
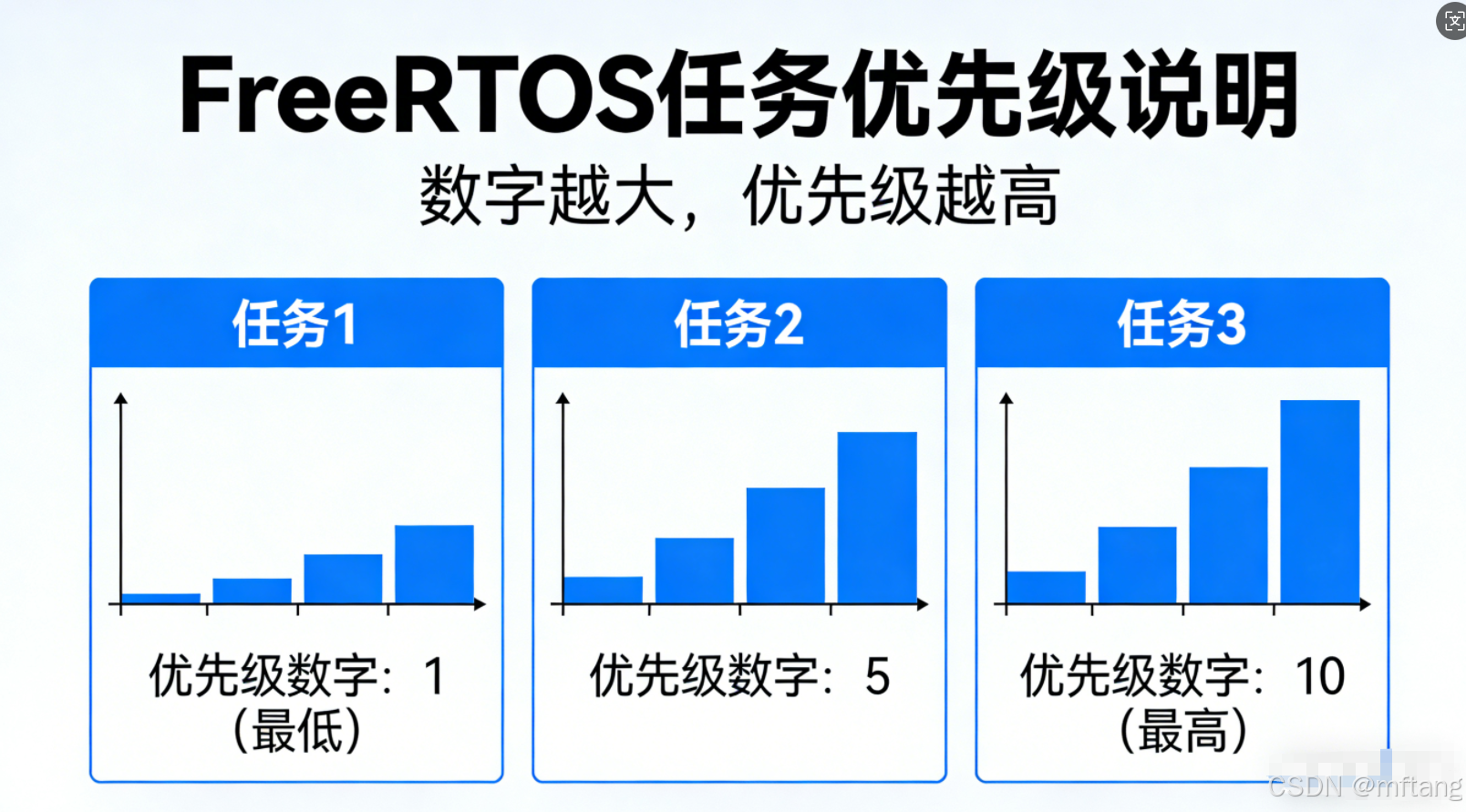
1) 数值意义
在FreeRTOS中,优先级数值越高,任务的优先级就越高。例如,优先级为3的任务比优先级为2的任务享有更高的执行权。
2) 配置范围
可用的优先级数量由 FreeRTOSConfig.h 文件中的 configMAX_PRIORITIES 宏定义。有效优先级范围为 0 到 (configMAX_PRIORITIES - 1)。
3) 特殊任务:
-
空闲任务 (Idle Task):优先级固定为 0(最低),负责在系统空闲时运行,并可进行内存清理。
-
守护任务 (Daemon Task):如软件定时器服务任务,通常被设置为最高优先级 (
configMAX_PRIORITIES - 1),以确保及时性。
2 调度行为:抢占与时间片
FreeRTOS默认采用 “基于优先级的可抢占式调度” ,并辅以 “同优先级时间片轮转”。
| 调度行为 | 触发条件 | 说明 |
|---|---|---|
| 抢占 | 高优先级任务进入就绪态(被创建、从阻塞/挂起中恢复、或被其他操作唤醒)。 | CPU会立即停止执行当前较低优先级的任务,转而执行更高优先级的任务。这是保证实时性的关键。 |
| 时间片轮转 | 多个相同优先级的任务同时处于就绪态。 | 调度器会为每个任务分配一个固定的时间片(通常为1个系统时钟滴答 tick)。任务运行满一个时间片后,会让给同优先级的下一个就绪任务。 |
3 优先级相关API
reeRTOS提供了一组简洁而强大的API来管理任务优先级。这些API允许您在创建任务时设置其优先级,并在运行时动态查询和修改它。掌握这些API是进行多任务调度的基础。
| API 函数 | 主要用途 | 关键参数说明 | 常用场景 |
|---|---|---|---|
xTaskCreate / xTaskCreateStatic |
创建任务时指定初始优先级。 | uxPriority: 任务的初始优先级 (0 ~ configMAX_PRIORITIES-1) |
系统初始化时创建所有任务。 |
vTaskPrioritySet |
动态设置(修改)一个已存在任务的优先级。 | xTask: 目标任务句柄;uxNewPriority: 新优先级。 |
实现优先级继承、根据系统状态动态调整任务重要性。 |
uxTaskPriorityGet |
获取一个任务的当前优先级。 | xTask: 目标任务句柄。 |
调试、监控或基于当前优先级做出逻辑判断。 |
taskYIELD |
主动让出CPU,让同优先级的就绪任务运行。 | 无参数。 | 实现协作式调度点,或在特定操作后立即触发调度。 |
configMAX_PRIORITIES |
配置常量,决定系统支持的最大优先级数量。 | 在 FreeRTOSConfig.h 中定义。 |
系统规划,决定优先级的范围。 |
4 设计原则、陷阱与最佳实践
4.1 设计原则
| 设计原则 | 说明与建议 |
|---|---|
| 按紧急和关键程度分配 | 对时间要求最严格的硬实时任务(如紧急停止、安全监控)应分配最高优先级。 |
| 避免“优先级反转” | 问题:中优先级任务可能阻塞正在等待低优先级任务释放资源(如互斥锁)的高优先级任务。 解决方案:使用支持优先级继承的互斥量。当高优先级任务等待时,持有锁的低优先级任务会临时继承高优先级,从而尽快执行并释放锁。 |
| 防止“饥饿” | 确保低优先级任务(如日志记录)也能获得CPU时间。高优先级任务应在等待事件(如信号量、队列、延时)时主动阻塞,让出CPU。 |
| 合理设置优先级数量 | 不需要为每个任务分配唯一优先级。通常,4-8个不同的优先级等级足以满足大多数复杂应用。过多的优先级会增加调度开销。 |
| 最高优先级任务的设计 | 最高优先级任务应运行时间极短,并频繁进入阻塞态,以避免独占CPU导致系统卡死。 |
4.2 优先级规划示例
下表展示了一个简易物联网设备中任务的优先级规划思路:
| 任务描述 | 推荐优先级 | 理由与调度行为 |
|---|---|---|
| 电机紧急制动 (中断服务) | 最高 (如 configMAX_PRIORITIES-1) |
对安全事件的响应延迟必须最短,需立即抢占所有任务。 |
| 传感器数据实时处理 | 高 (次高级) | 保证数据处理的时效性,可被紧急制动抢占,但自身可抢占大部分任务。 |
| 网络数据包发送 | 中 (中间值) | 重要但非实时,在系统无更紧急事件时运行。 |
| 系统状态日志记录 | 低 (如 1) | 后台任务,不影响关键功能,仅在系统空闲时运行。 |
| 空闲任务 | 0 (固定) | 系统自动管理,优先级最低。 |
5 案例设计
以一个典型的智能温控风扇系统为例,详细展示任务划分、优先级规划以及通信设计的全过程。这个系统具备传感器采集、实时控制、网络通信和人机交互等多种需求,非常适合作为多任务设计的范例。
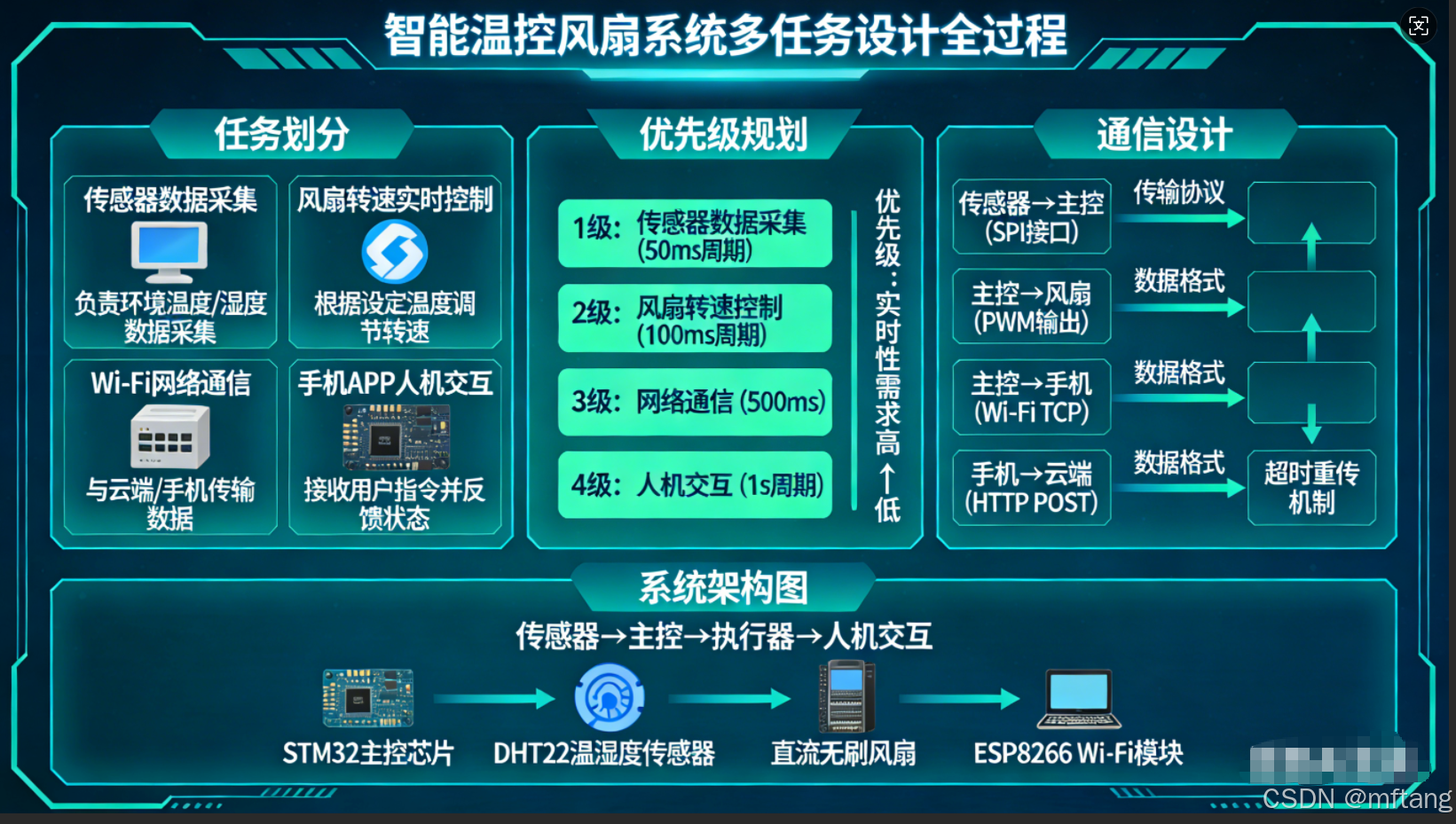
5.1 系统概述与任务模块分解
假设系统需要:
1)实时监测温度;
2)根据温度闭环控制风扇转速;
3)响应本地按钮设置;
4)将数据上传到云端;
5)在本地显示屏刷新状态。
我们可以分解出以下核心任务模块及其实时性要求:
| 任务模块 | 功能描述 | 关键实时性要求 | 执行周期/触发方式 |
|---|---|---|---|
| 温度采集 | 读取ADC,获取原始温度值。 | 高,需稳定周期采样以保证控制环稳定。 | 固定周期(如每10ms)。 |
| 控制算法 | 运行PID算法,计算目标风扇PWM占空比。 | 最高,计算必须及时,任何延迟都可能导致系统振荡或不稳。 | 由“新数据就绪”事件触发(应紧接采集之后)。 |
| 风扇驱动 | 更新PWM硬件寄存器,驱动风扇。 | 高,需及时响应控制算法的输出。 | 由“新控制输出”事件触发。 |
| 网络上传 | 打包数据并通过Wi-Fi/MQTT发送到云端。 | 低,允许一定延迟,但需保证最终成功。 | 固定周期(如每1秒)或事件触发(如温度突变)。 |
| 按键监控 | 检测用户按键(如模式切换、设定点调整)。 | 中,需在数百毫秒内响应,避免用户感到迟滞。 | 中断触发,或周期性扫描(如每50ms)。 |
| 显示刷新 | 更新OLED/LCD屏幕上的温度、转速等信息。 | 低,视觉可接受一定延迟。 | 固定周期(如每200ms)或状态变化时触发。 |
| 系统看门狗 | 监控系统健康,复位死机任务。 | 最高,必须在超时前被服务。 | 固定周期(如每500ms喂狗一次)。 |
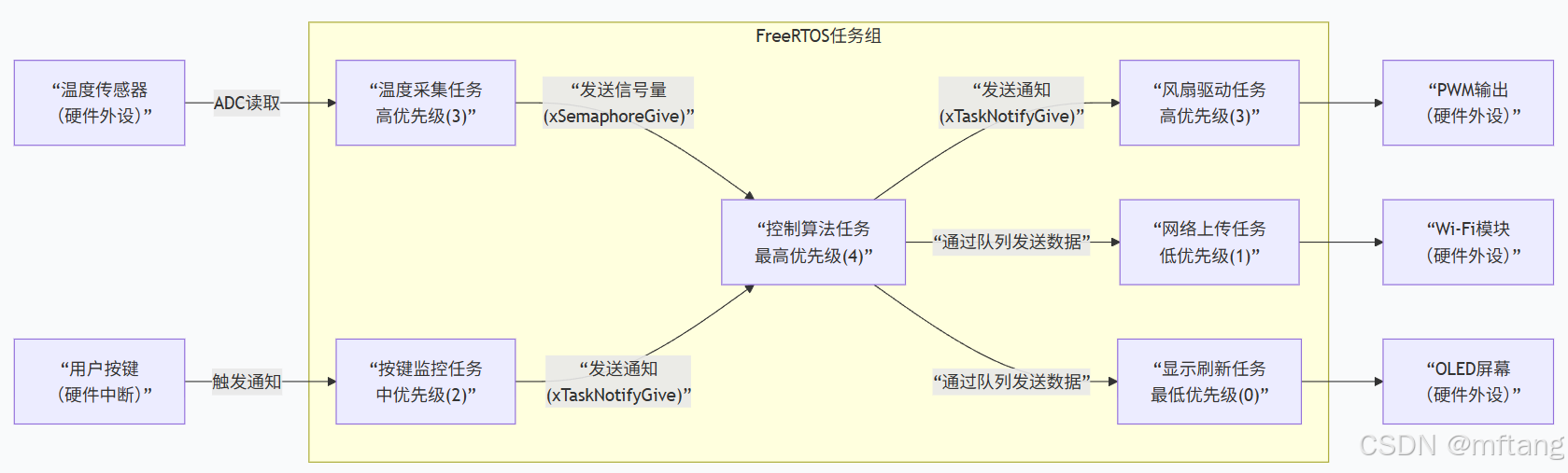
5.2 优先级规划与任务设计详解
1) 温度采集任务 (vTaskSensor)
-
优先级:高 (3)。需保证稳定的采样周期,防止其他任务长时间阻塞导致“漏采样”。
-
实现要点:
void vTaskSensor(void *pvParameters) { TickType_t xLastWakeTime = xTaskGetTickCount(); while(1) { float temp = read_adc(); // 读取ADC xQueueOverwrite(xTempQueue, &temp); // 覆盖式发送,确保总是最新数据 xSemaphoreGive(xNewDataSem); // 给出信号量,唤醒控制算法任务 vTaskDelayUntil(&xLastWakeTime, pdMS_TO_TICKS(10)); // 严格10ms周期 } } -
关键点:使用
vTaskDelayUntil而非vTaskDelay来保证绝对周期,防止累计误差。使用xQueueOverwrite是因为如果控制任务忙,未及时取走旧数据,我们更关心最新的温度值。
2) 控制算法任务 (vTaskControl)
-
优先级:最高 (4)。这是系统的核心,必须在数据就绪后立即计算,其输出直接影响系统的稳定性和安全。
-
实现要点:
void vTaskControl(void *pvParameters) { float temp, setpoint = 25.0, output; while(1) { xSemaphoreTake(xNewDataSem, portMAX_DELAY); // 等待新数据信号 xQueuePeek(xTempQueue, &temp, 0); // 窥视队列中最新的温度值 output = pid_calculate(temp, setpoint); // 执行PID计算 xTaskNotifyGive(xFanTaskHandle); // 通知风扇任务更新 // 同时将结果发送给低优先级任务供显示和上传 xQueueSendToBack(xCtrlQueue, &output, 0); } } -
关键点:它被高优先级的采集任务通过信号量唤醒,同时它又通过任务通知立即唤醒风扇驱动任务,形成了从采集到控制再到驱动的高优先级任务链,确保实时性。
3) 风扇驱动任务 (vTaskFan)
-
优先级:高 (3)。与控制算法同属关键链路,需立即响应控制输出。
-
实现要点:
void vTaskFan(void *pvParameters) { while(1) { ulTaskNotifyTake(pdTRUE, portMAX_DELAY); // 阻塞等待控制任务的通知 set_pwm_duty_cycle(g_current_output); // 立即更新PWM硬件 } } -
关键点:使用
ulTaskNotifyTake是最佳选择,因为它比二进制信号量更轻量、更快,且这是一对一的同步场景,完美匹配。
4) 网络上传任务 (vTaskNetwork) 与 显示刷新任务 (vTaskDisplay)
-
优先级:低 (1) 和 最低 (0)。它们属于非实时后台任务。
-
设计思路:它们从控制算法任务通过一个队列 (
xCtrlQueue) 接收数据。由于优先级低,当高优先级任务链繁忙时,它们会自然让出CPU,可能会偶尔“丢”一帧数据,但这对于显示和网络上传来说是完全可以接受的。这种设计保护了关键链路的执行不受干扰。
5) 按键监控任务 (vTaskKey)
-
优先级:中 (2)。它的实时性要求介于控制链路和后台任务之间。
-
设计思路:最佳实践是在硬件中断中仅记录按键事件,然后通过任务通知或信号量唤醒此任务进行去抖和长按检测等耗时逻辑。这样可以避免在中断中执行过长代码。
// 在GPIO中断服务程序中
void GPIO_IRQHandler() {
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
vTaskNotifyGiveFromISR(xKeyTaskHandle, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}5.3 设计验证与陷阱规避
在实现上述设计后,务必检查以下常见问题:
优先级反转风险:本设计中,关键数据流(温度值、控制输出)通过覆盖队列或通知传递,未使用互斥锁,因此无优先级反转风险。如果未来引入需要共享的复杂配置数据结构,务必使用互斥量(Mutex) 而非二进制信号量来保护。
系统可调度性:确保所有高优先级任务(优先级3和4)都有明确的阻塞点(如等待信号量、通知或延时)。特别是控制任务,绝不能是
while(1)内无阻塞的忙等待,否则会饿死所有低优先级任务。栈空间估计:为控制算法任务分配合适的栈空间,因为PID计算可能涉及浮点运算和局部数组,相对消耗栈空间。使用
uxTaskGetStackHighWaterMark函数进行优化。
6 总结与通用优先级规划表
基于以上分析,我们可以总结出适用于此类嵌入式系统的通用优先级规划原则:
| 优先级等级 | 任务类型 | 通信与同步方式 | 设计目的 |
|---|---|---|---|
| 最高 (N-1) | 安全关键、立即响应的任务(如紧急停止、看门狗)。 | 直接由硬件中断触发。 | 保证绝对的最高响应权。 |
| 高 | 核心控制链路、严格周期的传感任务。 | 信号量、任务通知触发,使用vTaskDelayUntil。 |
构建确定性的实时响应链。 |
| 中 | 用户交互、中等重要的服务。 | 由事件(如通知)或中等周期延时触发。 | 平衡响应性和系统资源。 |
| 低 | 本地状态更新、日志记录。 | 从队列接收数据,固定长周期运行。 | 在不影响关键任务下完成工作。 |
| 最低 (0) | 空闲任务及可延后的后台清理。 | 系统自动调度。 | 利用所有空闲时间。 |

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 24
24 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)