
FreeRTOS任务的运行状态和核心原理
FreeRTOS的任务(Task) 是其调度的基本单位,也是构建整个应用程序的基石。本文将从核心概念到设计实践,系统性地详细介绍。
目录
概述
FreeRTOS的任务(Task) 是其调度的基本单位,也是构建整个应用程序的基石。本文将从核心概念到设计实践,系统性地详细介绍。
1 任务的生命周期与状态
1.1 FreeRTOS的任务的框架
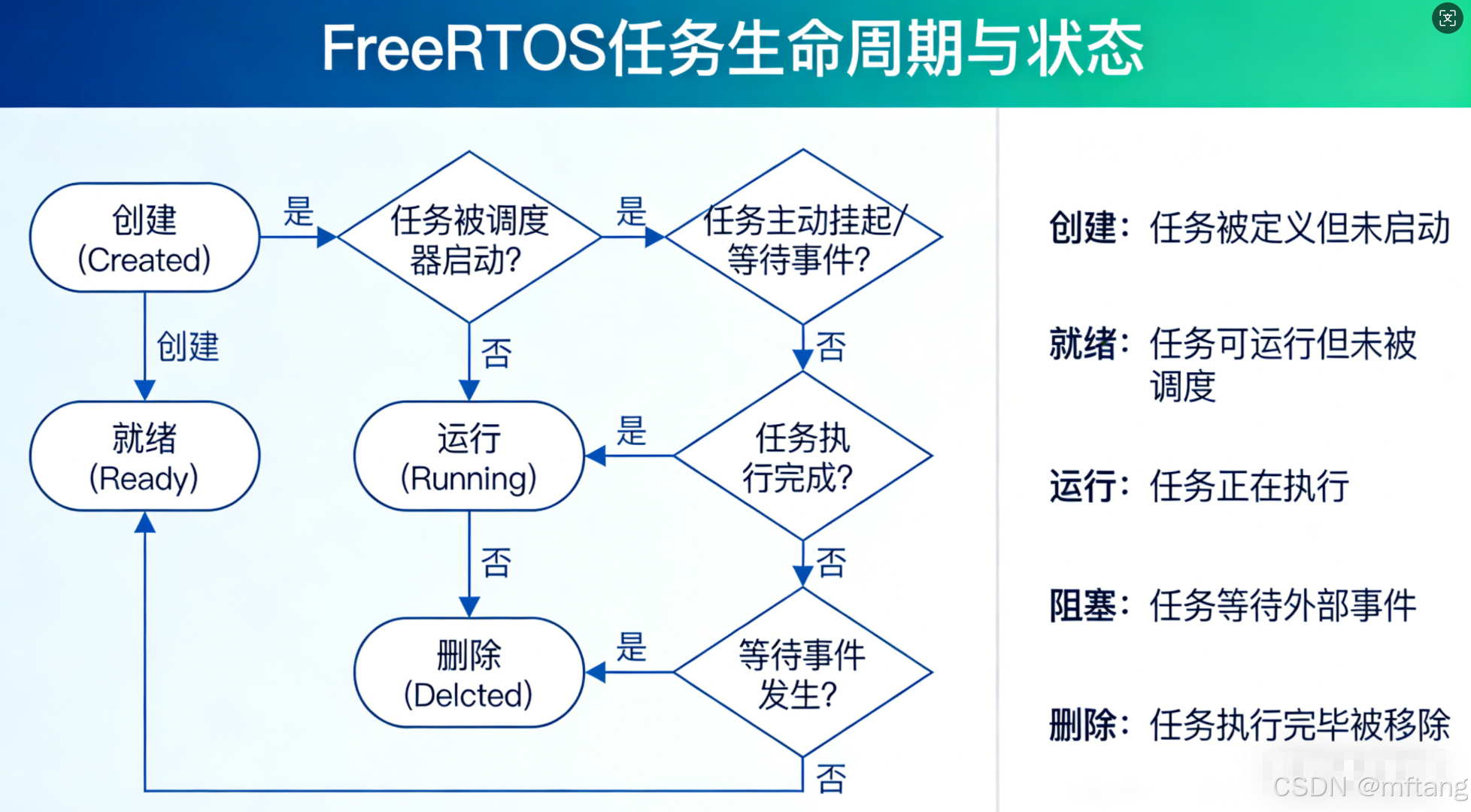
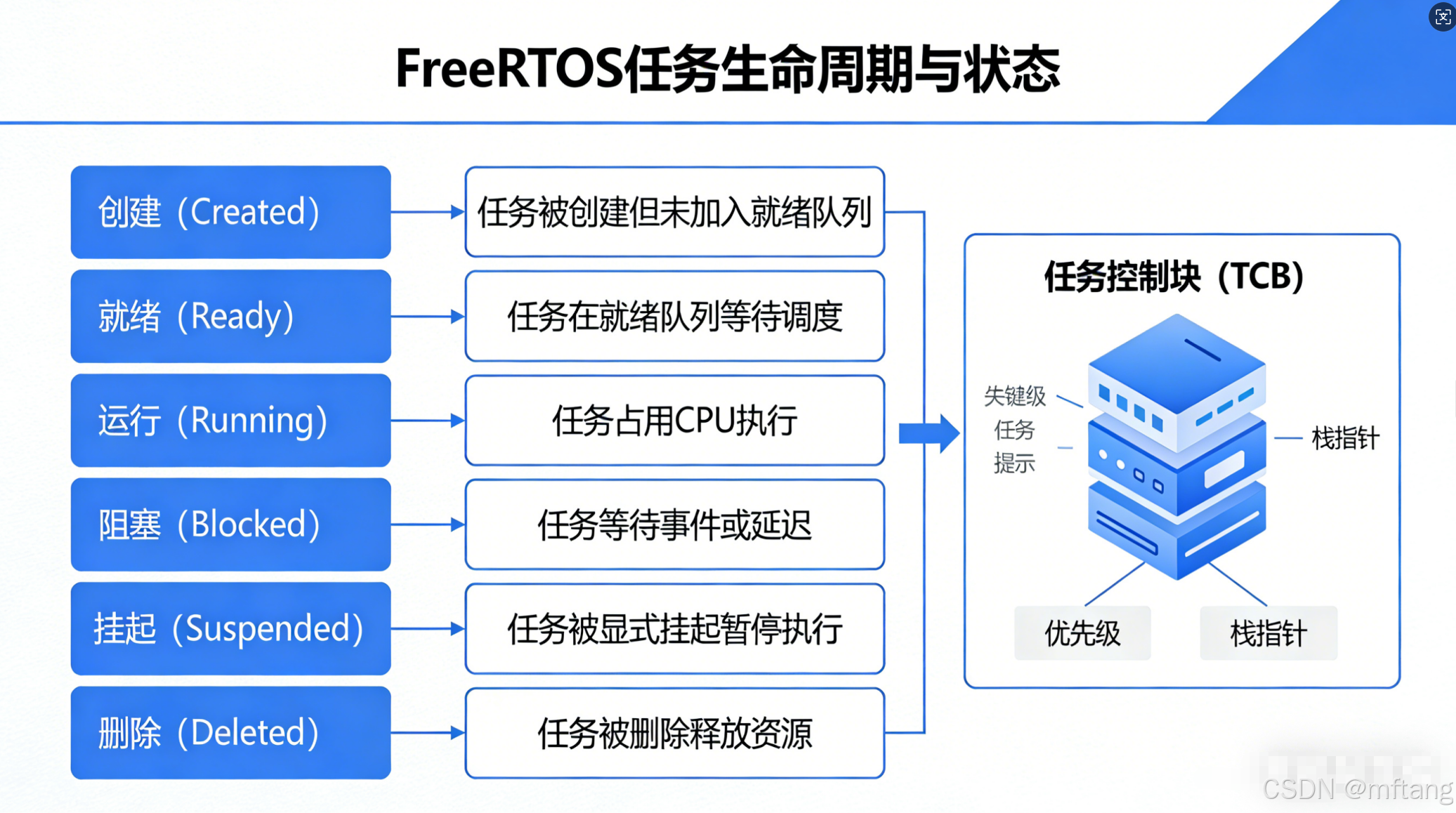
理解任务的状态转换是掌握FreeRTOS调度的关键。一个任务在其生命周期内,会在以下几种状态间切换,其核心转换关系如下图所示:
1.2 任务详解
1) 运行态(Running)
任务正在处理器上执行。单核CPU同一时刻只有一个任务处于此状态。
2) 就绪态(Ready)
任务已准备就绪,随时可以运行,只是在等待调度器选择。
3) 阻塞态(Blocked)
任务正在等待某个事件(Event)。这是实现高效同步的关键。
事件类型:等待队列数据、信号量、通知、事件组标志位、延时到期等。
进入方式:调用带有超时参数的API(如
xQueueReceive,vTaskDelay)。退出方式:等待的事件发生,或超时时间到期。
4) 挂起态(Suspended)
进入/退出方式:通过
vTaskSuspend()和vTaskResume()API 手动控制。用途:用于调试、或暂时使某个功能模块停止运行。
2 任务的创建与基础管理
2.1 创建任务(xTaskCreate)
// 动态创建任务(最常用)
BaseType_t xTaskCreate(
TaskFunction_t pvTaskCode, // 任务函数指针 (形如 void vTask(void *pvParams) )
const char * const pcName, // 任务描述名(调试用)
configSTACK_DEPTH_TYPE usStackDepth, // 栈深度(以字为单位)
void *pvParameters, // 传递给任务函数的参数
UBaseType_t uxPriority, // 初始优先级
TaskHandle_t *pxCreatedTask // 返回的任务句柄(用于后续引用该任务)
);
// 示例:创建一个闪烁LED的任务
void vBlinkTask(void *pvParameters) {
int led_pin = *(int*)pvParameters; // 获取传入的参数
while(1) {
digitalToggle(led_pin);
vTaskDelay(pdMS_TO_TICKS(500)); // 延时并进入阻塞态
}
}
void main() {
int led_pin = 25;
TaskHandle_t xBlinkTaskHandle;
xTaskCreate(vBlinkTask, "Blink", 1024, &led_pin, 1, &xBlinkTaskHandle);
vTaskStartScheduler(); // 启动调度器
}2.2 任务控制块(TCB)与栈
1) TCB
内核为每个任务分配的一个数据结构,包含任务状态、优先级、栈指针、事件列表项等信息。对用户透明。
2) 栈
每个任务都有独立的栈空间,用于存储局部变量、函数调用返回地址等。usStackDepth 需根据函数调用嵌套和局部变量使用情况谨慎设置,可通过 uxTaskGetStackHighWaterMark() 监控栈使用峰值。
3) 其他创建与管理API
xTaskCreateStatic:静态创建,需由用户提供TCB和栈内存(用于无动态内存的系统)。
vTaskDelete:删除任务,释放资源(谨慎使用)。
vTaskDelay/vTaskDelayUntil:任务延时,后者适用于精确的周期执行。
3 任务调度详解
3.1 规则
FreeRTOS默认采用基于优先级的可抢占式调度(Preemptive),辅以时间片轮转(Round-Robin)。
1) 可抢占(Preemption)
规则:高优先级任务就绪后,会立即抢占正在运行的低优先级任务。
触发:高优先级任务被创建、从阻塞/挂起中恢复、或通过
vTaskPrioritySet提升了优先级。
2) 时间片轮转(Time Slicing)
规则:当多个相同优先级的任务都处于就绪态时,调度器会为每个任务分配一个固定的时间片(通常为1个系统时钟滴答
tick)。触发:任务持续运行满一个时间片,或主动放弃CPU(如调用
taskYIELD())。
3.2 任务间通信与同步机制
任务不是孤立的,FreeRTOS提供了丰富的机制(如下表所示)来协调它们,这也是设计多任务系统的核心。
| 机制 | 核心特点 | 适用场景 | 与任务状态的关系 |
|---|---|---|---|
| 队列 (Queue) | 传递数据,FIFO,可阻塞 | 生产者-消费者模型,数据流 | 发送:队列满时,任务阻塞在发送状态。 接收:队列空时,任务阻塞在接收状态。 |
| 信号量 (Semaphore) | 传递信号/计数,无数据 | 资源管理、同步 | 获取:信号量为0时,任务阻塞。 释放:通常不阻塞。 |
| 互斥量 (Mutex) | 特殊的二进制信号量,支持优先级继承 | 保护共享资源,防止数据竞争 | 获取:被其他任务持有时,任务阻塞。 释放:不阻塞。 |
| 事件组 (Event Group) | 多事件标志位,位操作 | 等待多个事件中的任意或全部 | 等待:指定位模式未满足时,任务阻塞。 设置:不阻塞。 |
| 任务通知 (Task Notification) | 每个任务独有的“邮箱”,极高效 | 一对一的快速信号或数据传递 | 等待:通知值未更新时,任务可阻塞。 发送:不阻塞。 |
阻塞是同步的核心:
上表中除“释放/设置”操作外,其他操作在条件不满足时都会让任务进入阻塞态,从而让出CPU给其他就绪任务,这是FreeRTOS实现高效并发的关键。
3.3 设计任务的关键考虑因素
1) 优先级规划
优先级数量应适度(通常4-10级足够)。严格实时、关键的任务设高优先级;后台、非关键任务设低优先级。避免“优先级反转”。
2) 栈空间分配
根据函数调用深度和局部变量大小预估栈需求,并留有余量。利用 uxTaskGetStackHighWaterMark 监控优化。
3) 任务划分原则(高内聚、低耦合)
功能内聚:将紧密相关的功能放在同一任务中(如“传感器数据采集与滤波”)。
时间关键性分离:将对时间要求不同的功能分离到不同优先级的任务中(如“电机实时控制”与“状态日志上传”)。
周期分离:将执行周期不同的功能分离到不同任务中(如“1ms控制循环”与“100ms状态更新”)。
4) 入口函数设计
任务函数通常是一个永不返回的无限循环。在开始循环前可进行初始化。循环中必须有能引起阻塞的调用(如延时、等待信号量),以主动让出CPU。
4 一个综合性示例:数据采集与上传系统
1) 源代码
// 任务1: 高优先级,精确周期采集 (1ms)
void vAcquisitionTask(void *pvParams) {
TickType_t xLastWakeTime = xTaskGetTickCount();
while(1) {
read_adc_data();
xSemaphoreGive(xDataReadySem); // 释放信号量,通知处理任务
vTaskDelayUntil(&xLastWakeTime, pdMS_TO_TICKS(1)); // 绝对延时,保证精确周期
}
}
// 任务2: 中优先级,数据处理 (由信号量触发)
void vProcessingTask(void *pvParams) {
while(1) {
xSemaphoreTake(xDataReadySem, portMAX_DELAY); // 等待数据就绪信号,阻塞在此
process_data();
xQueueSend(xUploadQueue, &processedData, 0); // 发送数据到上传队列
}
}
// 任务3: 低优先级,网络上传 (由队列触发)
void vUploadTask(void *pvParams) {
DataPacket_t packet;
while(1) {
xQueueReceive(xUploadQueue, &packet, portMAX_DELAY); // 等待数据,阻塞在此
network_send(&packet);
}
}FreeRTOS的任务是一个包含独立栈和状态的执行实体。设计优良的多任务系统,其核心在于:
合理划分任务,实现模块化。
正确设置优先级,满足实时性。
巧妙运用通信机制(尤其是阻塞机制),让任务高效、有序地协同工作。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 38
38 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)