
基于GUI的MATLAB串口通信编程实战详解

简介:MATLAB中的串口通信是实现硬件交互与控制系统开发的重要技术。本文详细介绍如何使用MATLAB的serial对象进行串口通信,涵盖串口参数设置、数据读写及资源释放等核心操作,并结合GUIDE工具构建图形用户界面(GUI),实现发送与接收功能的可视化。通过回调函数控制数据传输与显示,提升程序交互性与实用性,适用于各类设备通信项目。文章还强调了错误处理与程序稳定性等关键问题,帮助开发者快速掌握MATLAB串口应用开发全流程。 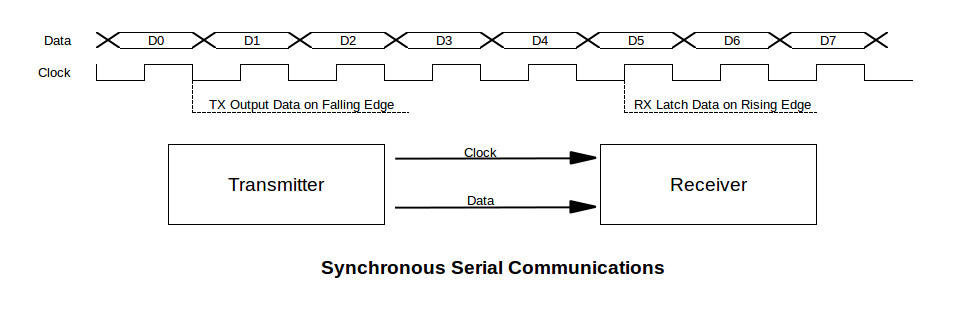
1. 串口通信基础概念与MATLAB编程环境概述
串口通信是一种广泛应用于嵌入式系统、工业控制与数据采集领域的异步通信方式,通过TX(发送)和RX(接收)两根信号线实现设备间的全双工数据交换。其核心参数包括波特率、数据位、停止位和校验位,需在通信双方严格匹配以确保数据完整性。在MATLAB中,串口通信依托 serial 类对象进行管理,结合仪器控制工具箱(Instrument Control Toolbox),用户可通过高级函数如 fopen 、 fwrite 和 fread 实现对串口设备的读写操作。本章将为后续深入探讨MATLAB环境下串口编程奠定理论与环境配置基础。
2. MATLAB中串口通信的核心理论与对象构建
在现代工业自动化、嵌入式系统开发以及科研实验中,串口通信作为最基础且可靠的设备间数据交换方式之一,依然占据着不可替代的地位。MATLAB 作为一个强大的科学计算与工程仿真平台,不仅具备出色的数值分析能力,还通过其 Instrument Control Toolbox 提供了对串行通信的完整支持。理解 MATLAB 中串口通信的底层机制和对象模型,是实现稳定、高效通信的关键前提。本章节将深入剖析串口通信的内在工作原理,并从面向对象的角度解析 MATLAB 如何封装串口资源为可编程的对象实体,从而为后续的参数配置、数据交互与 GUI 集成打下坚实基础。
2.1 串口通信的工作原理与数据传输机制
串口通信是一种基于逐位(bit-by-bit)传输的数据通信方式,广泛应用于微控制器、传感器、PLC、GPS 模块等设备之间的连接。它以较低的成本实现了远距离、低速率但高可靠性的通信需求。在 MATLAB 环境下进行串口操作前,必须首先掌握其基本工作机制,尤其是异步串行通信的数据帧结构与控制逻辑。
2.1.1 异步串行通信的基本流程
异步串行通信(Asynchronous Serial Communication)不依赖于共享时钟信号,而是依靠发送端和接收端各自独立的定时器来同步每一位数据的采样时间。这种通信方式的核心在于“约定”——即通信双方必须预先设定相同的波特率、数据格式(如数据位长度、校验方式、停止位数量),否则将导致数据解析错误。
整个通信流程如下:
- 空闲状态 :线路保持高电平(逻辑1),表示无数据传输。
- 起始信号 :当发送方准备发送一个字节时,先拉低线路一个比特时间,形成起始位。
- 数据传输 :随后依次发送8位(或其他设定长度)的数据位,低位优先(LSB First)。
- 校验位(可选) :若启用奇偶校验,则发送一位用于检测传输错误。
- 停止位 :恢复高电平至少一个比特时间,标志该字节传输结束。
接收端通过检测下降沿触发采样动作,并依据预设波特率每隔一定时间读取一次线路状态,重构原始数据。
这一过程可通过以下 Mermaid 流程图清晰展示:
sequenceDiagram
participant 发送端
participant 线路
participant 接收端
发送端->>线路: 高电平(空闲)
发送端->>线路: 拉低(起始位)
loop 每个数据位
发送端->>线路: 发送数据位(LSB开始)
end
alt 启用校验
发送端->>线路: 发送校验位
end
发送端->>线路: 拉高(停止位≥1 bit)
线路-->>接收端: 接收并采样各阶段电平
接收端->>接收端: 重组字节并交付应用层
该流程强调了“无时钟同步”的特点,也揭示了为何波特率必须严格匹配。例如,若发送端使用 9600 bps 而接收端设置为 115200 bps,则每比特采样周期相差近 12 倍,必然造成严重误码。
此外,在实际应用中,由于晶振精度差异或温度漂移,长时间运行可能导致累积误差。因此,对于高速通信(如 >115200 bps),建议采用硬件流控(RTS/CTS)或更稳定的同步通信协议。
2.1.2 数据帧结构解析:起始位、数据位、校验位与停止位
在串口通信中,每一个被传输的字符都封装在一个称为“数据帧”(Data Frame)的结构中。标准的数据帧由以下几个部分组成:
| 字段 | 说明 |
|---|---|
| 起始位(Start Bit) | 固定为低电平(0),表示新数据开始传输,强制接收端重置采样时序 |
| 数据位(Data Bits) | 实际有效数据,通常为5~8位,常见为8位(ASCII字符) |
| 校验位(Parity Bit) | 可选,用于简单差错检测,分为奇校验、偶校验或无校验 |
| 停止位(Stop Bit) | 高电平(1),持续1、1.5或2个比特时间,用于标识帧结束 |
下面以传输字符 'A' (ASCII 码 65,二进制 01000001 )为例,展示典型配置下的帧结构(8-N-1:8位数据、无校验、1位停止):
线路电平: [高] → [低][1][0][0][0][0][0][1][0][高]
↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑
空闲 起始位 数据位(LSB=1) 校验(无) 停止位
注意:虽然 'A' 的二进制是 01000001 ,但由于 LSB 优先传输,实际发送顺序为: 1,0,0,0,0,0,1,0 。
为了进一步说明不同配置的影响,下表列出几种常见的串口帧格式组合及其适用场景:
| 波特率 | 数据位 | 校验位 | 停止位 | 描述 | 应用示例 |
|---|---|---|---|---|---|
| 9600 | 8 | None | 1 | 最常用配置,兼容性强 | PC 与单片机通信 |
| 19200 | 7 | Even | 1 | 兼容老式终端,节省带宽 | 工业 HMI 设备 |
| 115200 | 8 | Odd | 2 | 高速+强校验+长停止,提升抗干扰能力 | 医疗仪器 |
| 4800 | 8 | None | 1.5 | 特殊设备要求,如某些 GPS 模块 | 定位模块通信 |
值得注意的是, 停止位可以是 1、1.5 或 2 位 ,其中 1.5 位仅在波特率 ≤ 600 bps 时有效,这是 RS-232 标准定义的历史遗留特性。
在 MATLAB 中,这些参数并非直接写入帧结构,而是通过 serial 对象的属性进行配置。例如:
s = serial('COM3');
set(s, 'DataBits', 8);
set(s, 'Parity', 'none');
set(s, 'StopBits', 1);
set(s, 'BaudRate', 9600);
上述代码创建了一个串口对象,并设置了典型的 8-N-1 帧格式。MATLAB 内部会将这些参数传递给操作系统驱动,最终作用于 UART 控制器硬件。
代码逻辑逐行解读:
s = serial('COM3');:构造一个指向 COM3 端口的 serial 对象实例。set(s, 'DataBits', 8);:设置每个数据帧包含 8 位有效数据。set(s, 'Parity', 'none');:禁用校验功能,减少开销。set(s, 'StopBits', 1);:指定每帧后附加 1 位停止位。set(s, 'BaudRate', 9600);:设定通信速率为 9600 比特每秒。
这些设置必须与目标设备完全一致,否则即使物理连接成功,也无法正确解析数据。
2.1.3 全双工与半双工模式在串口中的应用对比
根据数据传输方向的不同,串口通信可分为全双工(Full-Duplex)和半双工(Half-Duplex)两种模式。
全双工通信(Full-Duplex)
全双工允许发送(TX)和接收(RX)同时进行,拥有独立的发送线和接收线。典型的 RS-232 接口即采用此模式,使用 TxD 和 RxD 两条专用线路。
优点:
- 支持实时双向通信;
- 不需要切换方向,延迟低;
- 适合命令-响应型交互系统(如 PC 控制机器人)。
缺点:
- 需要更多引脚资源;
- 在多设备总线中布线复杂。
半双工通信(Half-Duplex)
半双工共用一条线路进行收发,需通过方向控制信号(如 DE/RE 引脚)切换工作模式。典型代表是 RS-485 总线。
优点:
- 节省线路资源,适合多点总线结构;
- 抗干扰能力强,传输距离可达千米级;
- 成本低,适用于工业现场总线。
缺点:
- 不能同时收发,存在通信间隙;
- 需精确控制使能信号时序,否则易丢包。
下表对比两者关键特性:
| 特性 | 全双工 | 半双工 |
|---|---|---|
| 数据通道 | 独立 TX/RX | 共享同一线路 |
| 同时收发 | 支持 | 不支持 |
| 典型接口 | RS-232, USB-UART | RS-485 |
| 最大节点数 | 点对点(1:1) | 多点(1:N,最多32~256) |
| 传输距离 | <15米(RS-232) | 可达1200米(RS-485) |
| 控制复杂度 | 简单 | 需管理方向使能 |
在 MATLAB 编程中,无论是哪种模式,其 API 表面看起来并无区别,因为 fread 和 fwrite 是独立调用的函数。但在半双工环境下,用户必须自行确保不会在发送过程中尝试接收,或者利用硬件自动方向控制芯片(如 SP3485)来规避冲突。
例如,在使用 RS-485 转 USB 模块时,某些高级设备会在检测到发送动作时自动激活驱动使能,无需软件干预。而低端模块可能需要额外 GPIO 控制,此时可在 MATLAB 中结合 Arduino 或 Raspberry Pi 进行协同控制。
综上所述,选择全双工还是半双工应基于具体应用场景:对于短距离、高性能的设备调试,推荐使用全双工;而对于长距离、多节点的工业采集系统,则更适合部署半双工总线架构。
2.2 常见物理接口类型及其在MATLAB中的映射关系
尽管串口通信的本质是逻辑层面的协议交互,但其实现离不开具体的物理接口。不同的电气标准决定了通信距离、抗干扰能力和连接方式。MATLAB 本身并不直接处理电气信号,而是通过操作系统提供的串口抽象层访问底层设备。因此,理解各类接口的特性及其在不同操作系统中的命名规则,是实现跨平台串口编程的前提。
2.2.1 RS-232标准接口的电气特性与通信距离限制
RS-232 是最早被广泛采用的串行通信标准之一,由 EIA(Electronic Industries Alliance)制定。其核心特点是使用电压差表示逻辑电平:
- 逻辑1(Mark) :-3V 至 -15V
- 逻辑0(Space) :+3V 至 +15V
这种负逻辑设计增强了抗噪声能力,尤其在早期模拟电路环境中表现良好。
典型引脚包括:
- TxD (Transmit Data):发送数据
- RxD (Receive Data):接收数据
- GND (Signal Ground):公共参考地
- RTS/CTS :硬件流控信号(可选)
RS-232 使用 DB9 或 DB25 连接器,现代计算机已逐渐取消原生串口,需借助 USB 转串口适配器扩展。
然而,RS-232 存在明显局限:
- 最大通信距离约为15米 ,超过后信号衰减严重;
- 点对点通信 ,不支持多设备总线;
- 单端信号传输 ,易受电磁干扰。
尽管如此,因其简单性和广泛的设备支持,仍在许多 legacy 系统中使用。
在 MATLAB 中,只要操作系统识别出对应的 COM 端口,即可通过标准语法访问:
s = serial('COM4'); % Windows 下 RS-232 映射为 COM4
fopen(s);
fprintf(s, 'Hello Device');
data = fscanf(s);
fclose(s);
delete(s);
此代码适用于任何挂载为 COM 端口的串行设备,无论其背后是原生 RS-232 还是 USB 转接芯片。
2.2.2 USB转串口适配器的工作机制与驱动兼容性分析
随着笔记本电脑取消传统串口,USB 转串口适配器成为主流解决方案。这类设备内部集成了桥接芯片(如 FTDI FT232、Prolific PL2303、Silicon Labs CP210x),将 USB 协议转换为 TTL 或 RS-232 电平。
工作原理如下:
graph LR
A[PC Application] --> B(USB Bus)
B --> C[USB-to-Serial Bridge Chip]
C --> D[TTL/RS-232 Level]
D --> E[外部设备]
桥接芯片在操作系统中注册为虚拟 COM 端口(VCP, Virtual COM Port),使得上层软件(如 MATLAB)无需感知底层 USB 协议的存在,仍可像操作传统串口一样进行读写。
但这也带来了驱动兼容性问题:
| 芯片型号 | Windows 支持 | Linux 内核支持 | macOS 支持 | 备注 |
|---|---|---|---|---|
| FTDI FT232 | 自动安装 | 内建(ftdi_sio) | 需第三方驱动 | 稳定性最佳 |
| Prolific PL2303 | 需手动安装 | 内建(pl2303) | 较差 | 新版芯片需更新驱动 |
| CP210x | 自动安装 | 内建(cp210x) | 自动识别 | Silicon Labs 官方支持好 |
在 MATLAB 中,判断是否成功识别设备的方法是查看可用端口列表:
% 查询所有可用串口设备
info = instrhwinfo('serial');
disp(info.SerialPorts);
输出示例:
'COM1', 'COM3', 'COM4'
若 USB 适配器未正确安装驱动,则不会出现在列表中。
建议在项目部署前统一选用 FTDI 或 CP210x 方案,避免因驱动缺失导致通信失败。
2.2.3 Windows与Linux系统下串口号(COM/TTY)识别方式
不同操作系统对串口设备的命名策略存在显著差异:
| 系统 | 串口命名格式 | 示例 |
|---|---|---|
| Windows | COMn |
COM1, COM3, COM17 |
| Linux | /dev/ttyS* , /dev/ttyUSB* , /dev/ttyACM* |
/dev/ttyUSB0, /dev/ttyS0 |
| macOS | /dev/cu.* 或 /dev/tty.* |
/dev/cu.usbserial-A10KGE4F |
在 MATLAB 中创建 serial 对象时,需根据运行平台传入正确的端口名:
% 跨平台串口初始化示例
if ispc
portName = 'COM4';
elseif isunix && exist('/dev/ttyUSB0', 'file')
portName = '/dev/ttyUSB0';
else
error('Unsupported or unknown platform.');
end
s = serial(portName);
set(s, 'BaudRate', 115200, 'DataBits', 8, 'StopBits', 1, 'Parity', 'none');
参数说明:
- ispc :判断是否运行在 Windows 平台;
- isunix :判断是否为 Unix-like 系统(Linux/macOS);
- exist('/dev/ttyUSB0', 'file') :检查特定设备文件是否存在;
- portName :动态确定端口路径;
- serial(portName) :创建对应端口的串口对象。
此方法提升了代码的可移植性,适用于实验室与现场部署环境的切换。
此外,Linux 系统还需注意权限问题。普通用户默认无法访问 /dev/ttyUSB* ,需加入 dialout 用户组:
sudo usermod -a -G dialout $USER
重启后方可正常操作。
总之,掌握物理接口与系统抽象之间的映射关系,有助于快速定位连接故障,提高开发效率。
2.3 MATLAB serial对象的设计理念与生命周期管理
MATLAB 将串口资源抽象为 serial 类对象,遵循面向对象编程范式,提供统一的接口用于配置、读写和释放资源。深入理解该类的设计结构与生命周期,是编写健壮串口程序的基础。
2.3.1 面向对象视角下的serial类属性结构剖析
serial 类继承自 instrument 抽象基类,封装了串行通信所需的所有属性与方法。其核心属性可分为三类: 连接参数、行为控制、状态监控 。
| 属性名 | 类型 | 默认值 | 功能说明 |
|---|---|---|---|
Port |
字符串 | ’‘ | 指定物理端口名称(如 COM3) |
BaudRate |
整数 | 9600 | 设置通信速率(bps) |
DataBits |
整数 | 8 | 每帧数据位数(5~8) |
Parity |
字符串 | ‘none’ | 校验方式:’odd’,’even’,’none’ |
StopBits |
数值 | 1 | 停止位长度(1, 1.5, 2) |
BytesAvailableFcn |
函数句柄 | [] | 数据到达时触发的回调 |
InputBufferSize |
整数 | 512 | 输入缓冲区大小(字节) |
OutputBufferSize |
整数 | 512 | 输出缓冲区大小 |
Timeout |
双精度 | 10 | 读写操作超时时间(秒) |
Status |
字符串 | ‘closed’ | 当前连接状态 |
这些属性可通过 get() 和 set() 方法动态查询与修改:
s = serial('COM3');
set(s, 'BaudRate', 115200, 'Timeout', 5);
currentRate = get(s, 'BaudRate');
status = get(s, 'Status');
代码逻辑逐行解读:
- 创建 serial 对象,尚未打开连接;
- 批量设置波特率与超时;
- 获取当前波特率验证设置结果;
- 查询当前状态(应为 ‘closed’);
所有属性均在对象内部维护,便于状态追踪与调试。
2.3.2 构造函数调用语法与端口句柄生成过程
serial 对象的构造过程涉及多个层次的资源申请:
s = serial('COM3', 'BaudRate', 115200);
该语句执行以下步骤:
1. 解析端口名并查找操作系统设备节点;
2. 加载相应驱动程序(如 WinUSB、FTDI VCP);
3. 分配内存存储对象属性;
4. 返回引用句柄 s ,用于后续操作。
注意:此时端口并未真正打开,仅完成配置。必须显式调用 fopen(s) 才会建立物理连接。
关闭时应按顺序执行:
fclose(s);
delete(s);
clear s;
遗漏任一步可能导致端口占用或资源泄漏。
2.3.3 属性继承与方法封装对通信稳定性的影响
serial 类的方法被精心封装以保障通信安全:
| 方法 | 功能 | 安全机制 |
|---|---|---|
fopen |
打开端口 | 检查波特率合法性、端口是否已被占用 |
fwrite |
发送数据 | 自动处理字符串编码、支持超时中断 |
fread |
接收数据 | 支持阻塞/非阻塞模式,防止缓冲区溢出 |
fclose |
关闭连接 | 清空缓冲区,释放系统资源 |
flushinput / flushoutput |
清空缓存 | 避免旧数据干扰 |
通过封装,开发者无需关心底层寄存器操作,即可实现稳定通信。
例如,在异常断开后重新连接时,合理的做法是:
try
if strcmp(get(s, 'Status'), 'open')
fclose(s);
end
catch
delete(s);
s = serial('COM3', 'BaudRate', 115200);
end
fopen(s);
这种方式有效避免了“僵尸句柄”问题,提高了程序鲁棒性。
综上, serial 类的设计体现了 MATLAB 工具箱对工程实践的深刻理解:既简化了开发流程,又保留了足够的控制粒度,适用于从教学演示到工业级系统的广泛应用场景。
3. 串口参数配置与数据交互的实践实现
在现代工业自动化、嵌入式系统调试以及科研设备通信中,串口通信作为一种稳定、低延迟的数据传输方式,依然发挥着不可替代的作用。MATLAB作为集算法开发、数据分析和硬件交互于一体的工程计算平台,提供了强大的串行通信支持能力。本章将深入探讨如何在MATLAB环境中完成串口参数的精确配置,并通过实际编程手段实现高效、可靠的数据发送与接收。重点不仅在于语法层面的操作指导,更强调参数设置背后的物理意义、软硬件协同机制以及异常处理策略的设计逻辑。
串口通信本质上是一种点对点的异步通信协议,其可靠性高度依赖于通信双方对参数的一致性约定。一旦发送端与接收端的波特率、数据位、校验方式等关键参数不匹配,就会导致数据错乱甚至完全无法解析。因此,在进行任何数据交互之前,必须建立一套科学的参数配置流程。与此同时,资源管理是保障通信连续性的基础——打开端口时需正确激活硬件握手信号,关闭时应确保缓冲区清空,避免残留数据影响下一次通信。此外,数据的发送与接收并非简单的函数调用即可完成,还需考虑编码格式转换、超时控制、缓冲区管理及事件驱动机制等多个维度的问题。
本章将以MATLAB R2023a及以上版本为开发环境,结合具体代码示例、流程图与参数表格,系统阐述从串口初始化到双向数据流控制的完整实践路径。通过对底层机制的剖析,帮助读者构建起“参数—操作—反馈”闭环式的串口编程思维模式,从而提升项目开发中的鲁棒性和可维护性。
3.1 串口通信参数的理论设定与实际匹配原则
串口通信的成功与否,首要取决于通信双方是否在一系列核心参数上达成一致。这些参数构成了数据帧的基本结构和传输节奏,直接影响数据能否被正确识别与还原。若任一参数配置错误,即便物理连接正常,也会导致接收到的数据出现乱码或丢失。因此,理解各参数的意义及其相互关系,是实现稳定串口通信的前提。
3.1.1 波特率的选择依据及常见标准值(9600, 115200等)
波特率(Baud Rate)是指每秒传输的符号数,通常用于表示串行通信中数据传输的速度。在异步串行通信中,它决定了每一位信号持续的时间宽度。例如,当波特率为9600时,每位信号的持续时间为 $ \frac{1}{9600} \approx 104.17\,\mu s $;而115200波特率下,该时间缩短至约8.68μs。显然,更高的波特率意味着更快的数据吞吐能力,适用于需要实时传输大量数据的应用场景,如传感器阵列采集或多通道遥测系统。
然而,提高波特率并非没有代价。随着速率上升,信号更容易受到噪声干扰、电缆分布电容和电磁干扰的影响,尤其是在长距离传输或使用劣质线缆的情况下,误码率显著增加。RS-232标准推荐的最大通信距离为15米,且建议在超过一定长度后降低波特率以保证稳定性。因此,在选择波特率时,应在 性能需求 与 信道质量 之间寻求平衡。
| 常见波特率 | 每位时间(μs) | 适用场景 |
|---|---|---|
| 1200 | 833.3 | 老旧设备、极低速通信 |
| 2400 | 416.7 | 工业仪表、远程抄表 |
| 9600 | 104.2 | 标准调试接口、PLC通信 |
| 19200 | 52.1 | 中速数据采集 |
| 38400 | 26.0 | 多设备联网 |
| 57600 | 17.4 | 高速传感器输出 |
| 115200 | 8.68 | 实时控制系统、高速日志输出 |
在MATLAB中设置波特率非常直观:
s = serial('COM3'); % 创建串口对象
set(s, 'BaudRate', 115200); % 设置波特率为115200
fopen(s); % 打开端口
上述代码中:
- serial('COM3') 创建一个指向Windows系统下COM3端口的串口对象;
- set(s, 'BaudRate', 115200) 显式设置波特率属性;
- fopen(s) 向操作系统请求访问该端口并启用通信链路。
逻辑分析 :
- 第一行创建串口对象但尚未建立物理连接,此时仅分配内存资源;
- 第二行修改对象属性,此设置会在调用fopen时传递给操作系统驱动;
- 第三行才是真正触发硬件初始化的动作,操作系统会根据当前配置加载相应的UART寄存器值。
值得注意的是,某些USB转串口芯片(如FTDI或CH340)可能对极高波特率的支持存在限制,需查阅芯片手册确认最大支持速率。此外,MATLAB默认波特率通常为9600,若未显式设置可能导致与高速外设通信失败。
3.1.2 数据位、停止位设置错误导致的数据错乱案例分析
除了波特率,数据帧的结构定义同样至关重要。一个完整的异步数据帧由以下几个部分组成:起始位(Start Bit)、数据位(Data Bits)、可选的校验位(Parity Bit)和停止位(Stop Bit)。其中,数据位和停止位的配置错误是最常见的通信故障来源之一。
假设某微控制器以8位数据、1位停止位(即8-N-1格式)发送字符‘A’(ASCII码65,二进制 01000001 ),其完整帧如下:
[起始位] [D0][D1][D2][D3][D4][D5][D6][D7] [停止位]
0 1 0 0 0 0 0 1 0 1
如果MATLAB端误设为7位数据,则只读取前7位( 1000001 ),结果解码为ASCII码65 → ‘A’看似正确,实则已丢失最高位信息;若数据为 11000001 (193),7位模式下仅取后7位得到 1000001 (65),造成严重误判。
另一个典型问题是停止位配置错误。若设备使用1.5或2个停止位,而MATLAB设为1,则接收方可能在下一个起始位到来前未能完成帧同步,引发帧错(Framing Error)。
以下是一个模拟错误配置引发数据错乱的实验代码:
% 错误配置示例:数据位设为7而非8
s = serial('COM3');
set(s, 'BaudRate', 9600);
set(s, 'DataBits', 7); % ❌ 错误:应为8
set(s, 'StopBits', 1);
set(s, 'Parity', 'none');
fopen(s);
data_hex = fread(s, 1, 'uint8'); % 读取一个字节
char_received = char(data_hex'); % 转换为字符
disp(['Received: ', num2str(data_hex), ' -> Char: ', char_received]);
fclose(s); delete(s); clear s;
参数说明与执行逻辑分析 :
-'DataBits', 7:强制按7位解析输入流,忽略第8位;
-fread(s, 1, 'uint8'):尝试读取1个无符号8位整数,但由于底层按7位打包,实际接收到的值可能已被截断或重组;
- 若原始数据包含大于127的字节(如0xC3=195),将无法正确还原。
此类问题可通过示波器抓包或逻辑分析仪验证真实波形来定位。实践中建议始终遵循设备手册规定的帧格式,优先采用8-N-1这一最通用的标准。
3.1.3 校验位模式(奇、偶、无校验)的应用场景与误差检测能力
校验位(Parity Bit)是一种简单但有效的单比特差错检测机制,常用于增强串行通信的可靠性。其基本原理是在数据位之后附加一位,使得整个数据字段(含校验位)中“1”的个数满足预设条件。
- 无校验(None) :不添加校验位,传输效率最高,适合高可靠性信道。
- 奇校验(Odd) :使总“1”数为奇数。
- 偶校验(Even) :使总“1”数为偶数。
例如,发送数据 1011001 (共4个1),若采用偶校验,则校验位为0(保持偶数个1);若采用奇校验,则校验位为1(变为奇数个1)。
s = serial('/dev/ttyUSB0'); % Linux系统下设备节点
set(s, 'BaudRate', 19200);
set(s, 'Parity', 'even'); % 设置偶校验
set(s, 'DataBits', 8);
set(s, 'StopBits', 1);
逻辑分析 :
- 当设置Parity属性后,MATLAB会在调用fwrite时自动计算并插入校验位;
- 接收端若也启用相同校验模式,会检查每一帧的奇偶性,发现不符时报“Parity Error”,并可能丢弃该帧;
- 此机制只能检测 奇数个比特翻转 ,无法纠正错误,也不能检测偶数个错误。
校验位的应用场景包括:
- 工业现场总线(如Modbus RTU)要求偶校验以提高抗干扰能力;
- 医疗设备通信中常用奇校验防止关键指令误触发;
- 在短距离、高质量线路中可关闭校验以提升吞吐量。
下面用Mermaid流程图展示带校验位的接收判断流程:
graph TD
A[开始接收一帧] --> B{是否有起始位?}
B -- 是 --> C[读取8位数据]
C --> D[读取校验位]
D --> E[计算数据位中'1'的数量]
E --> F{校验模式为偶?}
F -- 是 --> G[总数应为偶]
F -- 否 --> H[总数应为奇]
G --> I{实际总数为偶?}
H --> J{实际总数为奇?}
I -- 是 --> K[校验通过, 接收有效]
I -- 否 --> L[校验失败, 抛出错误]
J -- 是 --> K
J -- 否 --> L
综上所述,合理配置串口参数不仅是技术操作,更是系统级设计决策。只有充分理解每个参数的作用边界与失效后果,才能在复杂环境下构建稳健的通信链路。
3.2 串口资源的操作控制流程
3.2.1 fopen函数执行时底层硬件握手信号的激活过程
在MATLAB中, fopen 不仅是打开文件的概念延伸,更是串口通信生命周期的起点。调用 fopen(s) 会触发一系列底层操作系统级别的动作,最终激活物理串口的通信能力。这一过程涉及设备驱动、UART控制器配置以及硬件握手信号(如RTS/CTS)的初始化。
当执行 fopen(s) 时,MATLAB通过调用操作系统API(如Windows的CreateFile / SetupComm,Linux的open() / tcsetattr)获取对指定串口设备的独占访问权。随后,根据当前串口对象的属性(BaudRate、Parity等),配置UART寄存器,包括:
- 波特率因子(DLL/DLM寄存器)
- 数据格式(LCR寄存器)
- FIFO使能状态(FCR寄存器)
- 中断掩码(IER寄存器)
同时,硬件流控信号也被激活。以RTS/CTS为例:
s = serial('COM3');
set(s, 'FlowControl', 'hardware'); % 启用硬件流控
fopen(s); % 此时RTS信号被拉低,表示“就绪接收”
逻辑分析 :
-FlowControl设为'hardware'后,操作系统将在fopen时自动控制RTS(Request To Send)引脚;
- RTS置低表示PC端准备好接收数据;
- 远端设备检测到RTS低电平后,方可通过TX线发送数据;
- 若远端CTS(Clear To Send)未就绪,即使PC写入数据也不会立即发出。
这种机制有效防止了接收缓冲区溢出,尤其适用于处理突发性大数据流的场景。
3.2.2 端口占用异常处理与多进程访问冲突解决方案
串口属于独占型资源,同一时刻只能被一个进程打开。若另一程序(如串口助手、Arduino IDE)已占用COM3,则MATLAB调用 fopen 将抛出错误:
try
fopen(s);
catch ME
if contains(ME.message, 'already opened')
disp('串口被其他程序占用,请关闭后再试!');
return;
else
rethrow(ME);
end
end
解决方案包括:
- 使用 instrfind 查找并释放被MATLAB自身持有的句柄;
- 提供用户提示,引导关闭冲突程序;
- 在GUI应用中加入“刷新可用端口”功能,动态排除忙端口。
3.2.3 fclose命令执行前后缓冲区清理策略
调用 fclose(s) 不仅断开通信,还会执行以下操作:
- 清空输入/输出缓冲区;
- 恢复RTS/ DTR信号为默认状态;
- 释放系统句柄,允许其他进程访问。
建议始终配合 delete(s) 和 clear s 彻底销毁对象,防止内存泄漏。
fclose(s);
delete(s);
clear s;
扩展说明 :
缓冲区清理可避免下次打开时读取到历史残留数据。某些设备在重启后会重发上次未确认的数据,若不清空缓冲区,可能导致重复处理。
(后续章节继续展开数据发送与接收机制……)
4. GUI界面设计与用户交互逻辑构建
在现代嵌入式系统、工业自动化及科研实验中,图形用户界面(GUI)已成为人机交互不可或缺的组成部分。MATLAB 提供了强大的 GUI 开发工具——GUIDE(Graphical User Interface Development Environment),使得开发者能够快速构建功能完整、响应灵敏且具备专业外观的应用程序。尤其在串口通信场景下,一个结构清晰、操作直观的 GUI 不仅能显著降低用户的使用门槛,还能提升数据监控和设备控制的实时性与可靠性。本章将深入探讨如何利用 MATLAB 的 GUI 工具链实现串口通信系统的可视化封装,涵盖从控件布局到事件驱动机制的全链路设计方法。
通过 GUIDE 或 App Designer 构建的串口调试助手,可集成波特率设置、串口号选择、数据收发窗口、发送按钮、清空日志等功能模块,并支持动态更新与异常反馈。这种集成化界面不仅提升了用户体验,也为后续的功能扩展(如数据绘图、协议解析、远程控制等)提供了良好的架构基础。更重要的是,在多任务并行运行环境中,合理的回调函数组织与资源管理策略是保障系统稳定性的关键所在。
本章内容将以实际开发流程为导向,首先介绍 MATLAB 中 GUI 的核心组件及其布局机制,随后逐步展开串口配置模块的可视化封装技术,接着深入分析数据交互区域的动态刷新策略,最后重点剖析回调函数体系的结构化设计原则。整个过程结合代码示例、参数说明与流程图解,帮助读者掌握从零构建一个工业级串口通信 GUI 应用的核心能力。
4.1 MATLAB GUIDE开发环境的核心组件与布局管理
MATLAB 的 GUIDE 是一种基于拖拽式操作的图形界面开发工具,允许开发者通过可视化方式布置控件,并自动生成对应的 .fig 和 .m 文件框架。其优势在于开发效率高、学习曲线平缓,特别适合用于快速原型设计或教学演示类项目。尽管 MathWorks 近年来主推 App Designer 作为新一代 GUI 开发平台,但 GUIDE 仍被广泛应用于已有工程维护与中小型项目开发中,理解其工作机制对深入掌握 MATLAB 图形编程具有重要意义。
4.1.1 图形控件分类:按钮、文本框、下拉菜单的功能定义
在 GUIDE 环境中,常用的 UI 控件主要包括静态文本框(Static Text)、编辑文本框(Edit Text)、按钮(Push Button)、复选框(Check Box)、单选按钮(Radio Button)、列表框(Listbox)和弹出式菜单(Popup Menu)等。每一类控件都有特定的用途和属性集合,合理选用控件类型是构建高效交互界面的前提。
| 控件类型 | 主要用途 | 常见应用场景 |
|---|---|---|
| Push Button | 触发某个动作(如打开串口、发送数据) | “打开”、“关闭”、“发送”按钮 |
| Edit Text | 输入或显示可编辑/只读文本 | 显示接收数据、输入发送内容 |
| Static Text | 显示不可编辑的说明性文字 | 标签提示,如“波特率:” |
| Popup Menu | 提供预设选项供用户选择 | 波特率、数据位、校验位选择 |
| Listbox | 多项选择或展示列表信息 | 可用串口列表、历史命令记录 |
| Check Box | 开启/关闭某一功能开关 | 是否启用校验、是否自动换行 |
| Radio Button | 在多个互斥选项中进行单选 | 选择通信模式(ASCII / Hex) |
| Axes | 绘制图形(曲线、频谱等) | 实时数据显示、波形绘制 |
这些控件通过 Tag 属性标识唯一性,便于在回调函数中引用。例如,若某按钮的 Tag 设置为 'btnOpenPort' ,则其点击事件的回调函数名为 btnOpenPort_Callback ,该命名规则由 MATLAB 自动维护。
function btnOpenPort_Callback(hObject, eventdata, handles)
% hObject 当前控件句柄
% eventdata 事件数据(通常为空)
% handles 存储所有控件和用户数据的结构体
portName = get(handles.popupPort, 'String'); % 获取下拉菜单中的串口名
selectedIndex = get(handles.popupPort, 'Value'); % 获取选中索引
selectedPort = portName{selectedIndex}; % 转换为字符串
baudRateStr = get(handles.popupBaud, 'String');
baudRateIndex = get(handles.popupBaud, 'Value');
baudRate = str2double(baudRateStr{baudRateIndex});
try
s = serial(selectedPort, 'BaudRate', baudRate);
fopen(s);
set(handles.txtStatus, 'String', ['已连接至 ', selectedPort]);
guidata(hObject, handles); % 更新handles以保存serial对象
catch ME
errordlg(ME.message, '串口打开失败');
end
end
代码逻辑逐行解读:
- 第 1 行:定义回调函数,由 GUIDE 自动生成。
- 第 5–7 行:获取用户在“串口号”下拉菜单中选择的内容,包括选项列表和当前选中项。
- 第 9–11 行:同理获取波特率设定值,并转换为数值型。
- 第 14 行:创建
serial对象,指定端口名和波特率。 - 第 15 行:尝试打开串口连接。
- 第 16 行:成功后更新状态栏文本。
- 第 17 行:使用
guidata将新创建的串口对象s存入handles结构体,供其他回调函数访问。 - 第 19–21 行:捕获异常并弹出错误对话框,防止程序崩溃。
此段代码体现了控件之间数据联动的基本模式,也展示了如何通过 get 和 set 函数实现控件状态读写。
4.1.2 界面响应速度优化与UI图层渲染机制
当界面包含大量控件或频繁刷新文本内容时,可能会出现卡顿现象。这是由于 MATLAB 默认采用同步渲染机制,每次调用 set 修改控件属性都会触发重绘。为提升响应性能,应采取以下优化措施:
- 批量更新控件属性 :避免在循环中逐次修改控件内容,而是先拼接完整字符串再一次性赋值。
- 禁用不必要的刷新 :使用
drawnow limitrate替代drawnow,限制每秒屏幕刷新次数,减少 CPU 占用。 - 延迟执行非关键操作 :对于日志保存、统计计算等耗时任务,可通过定时器异步执行。
此外,MATLAB 的 UI 图层采用 Z-order 分层渲染机制,顶层控件会覆盖底层元素。因此,在布局时应注意控件层级关系,避免遮挡重要信息。可通过 uistack 函数调整控件前后顺序:
uistack(handles.txtLog, 'top'); % 将日志框置于顶层
下面是一个 mermaid 流程图,描述 GUI 初始化过程中控件加载与事件注册的执行顺序:
graph TD
A[启动 GUIDE] --> B[加载 .fig 文件]
B --> C[解析控件布局]
C --> D[生成初始化函数 OpeningFcn]
D --> E[执行控件默认值设置]
E --> F[注册各控件回调函数]
F --> G[进入事件监听循环]
G --> H{是否有用户操作?}
H -- 是 --> I[触发对应 Callback]
I --> J[执行业务逻辑]
J --> K[更新 UI 或串口状态]
K --> G
H -- 否 --> L[等待中断]
该流程揭示了 MATLAB GUI 的事件驱动本质:程序主线程始终处于等待状态,直到用户触发某个动作才激活相应回调函数。这种模型虽简化了并发处理复杂度,但也要求每个回调函数必须高效执行,否则会导致界面冻结。
4.1.3 自适应布局设计提升跨平台兼容性
不同操作系统(Windows、Linux、macOS)以及不同分辨率屏幕可能导致 GUI 界面错位或字体失真。为此,需采用自适应布局策略,确保界面在各种环境下均能正常显示。
一种常见做法是在 OpeningFcn 中动态计算控件位置。例如,根据父窗口大小按比例分配空间:
function gui_OpeningFcn(hObject, eventdata, handles, varargin)
axes(handles.axesPlot); % 初始化绘图区
cla; % 清除坐标轴
figPos = get(hObject, 'Position');
width = figPos(3);
height = figPos(4);
% 动态设置日志框大小(占窗口高度的60%)
logHeight = 0.6 * height;
set(handles.txtLog, 'Position', [50, 50, width - 100, logHeight]);
% 设置按钮居中排列
btnWidth = 80;
btnX = (width - 3*btnWidth - 40) / 2; % 三个按钮等距分布
set(handles.btnClear, 'Position', [btnX, 20, 80, 25]);
set(handles.btnSend, 'Position', [btnX + 100, 20, 80, 25]);
set(handles.btnClose, 'Position', [btnX + 200, 20, 80, 25]);
handles.output = hObject;
guidata(hObject, handles);
end
上述代码通过读取主窗口尺寸动态调整控件位置,实现了基本的响应式布局。更高级的方法可借助第三方工具包(如 ResizeFig )实现完全自适应缩放。
综上所述,GUIDE 提供了一套完整的 GUI 开发生态,通过合理使用控件、优化渲染性能与布局策略,可以构建出既美观又高效的串口通信界面。下一节将进一步聚焦于具体功能模块的设计实现。
4.2 串口配置模块的可视化封装
4.2.1 下拉列表绑定波特率预设值的技术实现
在串口通信中,波特率是决定数据传输速率的关键参数。常见的标准值包括 9600、19200、38400、57600 和 115200 bps。为方便用户选择,通常将这些值预置在一个下拉菜单中。
实现步骤如下:
- 在 GUIDE 中添加一个
Popup Menu控件; - 设置其
String属性为:9600 19200 38400 57600 115200 - 在初始化函数中也可通过代码设置:
set(handles.popupBaud, 'String', {'9600', '19200', '38400', '57600', '115200'});
set(handles.popupBaud, 'Value', 5); % 默认选择115200
用户选择后可通过 Value 属性获取索引,进而提取对应值。
4.2.2 动态获取可用串口列表并填充至UI控件的方法
硬编码串口号不利于通用性。理想情况是程序启动时自动扫描系统中存在的串口设备。
MATLAB 提供 instrfindall 函数查找所有活动串口对象,但获取物理端口需依赖操作系统命令。
function updatePortList(handles)
if ispc
% Windows 系统
[status, cmdout] = system('wmic path Win32_SerialPort get DeviceID');
lines = strsplit(cmdout, '\n');
ports = {};
for i = 1:length(lines)
if contains(lines{i}, 'COM')
portName = strtrim(lines{i});
ports{end+1} = portName;
end
end
else
% Linux/macOS 系统
[~, cmdout] = system('ls /dev/tty.*');
lines = strsplit(cmdout, '\n');
ports = {};
for i = 1:length(lines)
if contains(lines{i}, 'tty.')
ports{end+1} = strtrim(lines{i});
end
end
end
if isempty(ports), ports = {'无可用串口'}; end
set(handles.popupPort, 'String', ports);
set(handles.popupPort, 'Value', 1);
end
该函数跨平台获取串口列表并填充至下拉框,增强了应用的可移植性。
4.2.3 参数合法性验证机制防止非法配置提交
在用户点击“打开串口”前,应对所选参数进行校验:
function validateSerialConfig(handles)
portCell = get(handles.popupPort, 'String');
selectedIndex = get(handles.popupPort, 'Value');
port = portCell{selectedIndex};
if strcmp(port, '无可用串口')
warndlg('请选择有效的串口设备!', '无效配置');
return false;
end
baudStr = get(handles.popupBaud, 'String');
baudVal = str2double(baudStr{get(handles.popupBaud, 'Value')});
if ~ismember(baudVal, [9600, 19200, 38400, 57600, 115200])
warndlg('请选用标准波特率值。', '参数错误');
return false;
end
return true;
end
只有通过验证才允许建立连接,有效避免因误操作导致的异常。
4.3 数据交互界面的动态更新技术
4.3.1 使用edit text控件实现实时接收数据显示
接收数据常显示在多行 Edit Text 控件中。为实现连续追加,需读取原有内容并拼接新数据:
currentText = get(handles.txtReceive, 'String');
newText = [currentText, receivedData, '\n'];
set(handles.txtReceive, 'String', newText);
注意:过长文本会影响性能,建议设置最大行数限制。
4.3.2 滚动文本区域的自动换行与历史记录保存
为防止内存溢出,可定期清理旧数据:
maxLines = 1000;
lines = split(get(handles.txtReceive, 'String'), '\n');
if length(lines) > maxLines
lines = lines(end-maxLines+1:end);
set(handles.txtReceive, 'String', strjoin(lines, '\n'));
end
同时可加入“保存日志”按钮导出为 .log 文件。
4.3.3 发送区输入内容的格式高亮与快捷发送功能
支持 HEX 发送时,需对输入做语法检查:
inputStr = get(handles.txtSend, 'String');
if get(handles.chkHexMode, 'Value') == 1
hexPattern = '^[0-9A-Fa-f\s]+$';
if ~regexp(inputStr, hexPattern, 'once')
errordlg('HEX模式下请输入合法十六进制字符!', '格式错误');
return;
end
dataBytes = sscanf(strrep(inputStr, ' ', ''), '%2x')';
else
dataBytes = inputStr;
end
fwrite(handles.serialObj, dataBytes, 'uint8');
此段代码实现了 ASCII 与 HEX 混合发送功能,并加入了格式校验。
4.4 回调函数体系的结构化组织
4.4.1 按钮点击事件与串口操作的逻辑绑定
所有 UI 操作最终映射为串口指令。例如,“发送”按钮触发 fwrite ,“清空”按钮清除接收区:
function btnSend_Callback(~, ~, handles)
sendText = get(handles.txtSend, 'String');
fwrite(handles.serialObj, sendText, 'char');
end
function btnClear_Callback(~, ~, handles)
set(handles.txtReceive, 'String', '');
end
4.4.2 定时器控件辅助实现周期性数据采集
使用 timer 对象定期轮询接收缓冲区:
t = timer('TimerFcn', @pollData, 'Period', 0.1, 'ExecutionMode', 'fixedRate');
start(t);
function pollData(~, ~)
if hasdata(handles.serialObj)
data = fread(handles.serialObj, 1024);
disp(char(data'));
end
end
4.4.3 回调函数间的数据共享机制(hObject与handles的使用)
handles 结构体是全局数据枢纽。任何修改都需通过 guidata 持久化:
handles.serialObj = s;
handles.timerObj = t;
guidata(hObject, handles); % 必须调用以保存更改
这样其他回调函数即可访问同一份上下文数据,形成统一的状态管理体系。
5. GUI环境下串口资源的全生命周期管理
在现代工业自动化、嵌入式系统调试以及科研数据采集场景中,图形用户界面(GUI)已成为串口通信应用不可或缺的一部分。MATLAB凭借其强大的图形开发能力与简洁的编程语法,广泛应用于构建直观、高效的串口通信工具。然而,在GUI环境中实现对串口资源的完整生命周期管理——从初始化到释放——远比命令行脚本复杂得多。由于GUI具有异步事件驱动特性,多个控件可能同时触发操作,若缺乏严谨的状态控制机制,极易导致端口重复打开、缓冲区冲突、句柄泄漏等问题。
本章聚焦于 GUI环境下的串口对象状态流转机制 ,深入探讨如何通过合理的架构设计和编程实践,确保串口在整个运行周期内始终处于可控、安全、高效的状态。我们将结合MATLAB GUIDE 或 App Designer 的典型结构,分析串口创建、配置、使用、关闭等关键阶段的技术要点,并引入状态机模型来统一管理不同操作之间的依赖关系。此外,还将展示如何利用回调函数、全局句柄容器与定时器协同工作,构建一个具备容错能力和动态响应特性的串口管理系统。
5.1 串口对象的创建与初始化流程设计
在GUI应用程序中,串口对象的创建不应简单地放在启动函数中静态完成,而应根据用户的实际操作动态执行。这一过程需要综合考虑硬件可用性、参数合法性、系统平台差异等多个因素。有效的初始化策略不仅能提升用户体验,还能显著降低后续通信失败的概率。
5.1.1 动态串口对象构造与参数绑定机制
为了支持灵活的设备切换与配置更新,推荐采用“按需创建”而非“预加载”的方式生成 serial 对象。即只有当用户明确选择串口号并点击“打开端口”按钮后,才执行对象构造逻辑。这样可以避免因默认端口不存在或已被占用而导致程序异常。
以下为基于 GUIDE 环境的串口对象动态创建代码示例:
% Callback function for 'Open Port' button
function openPortButton_Callback(hObject, eventdata, handles)
% 获取UI中选定的串口号和波特率
selectedPort = get(handles.comPortList, 'String');
selectedIndex = get(handles.comPortList, 'Value');
baudRateStr = get(handles.baudRateList, 'String');
baudRateIndex = get(handles.baudRateList, 'Value');
portName = selectedPort{selectedIndex};
baudRate = str2double(baudRateStr{baudRateIndex});
% 检查是否已存在打开的串口
if isfield(handles, 's') && isvalid(handles.s)
if strcmp(get(handles.s, 'Status'), 'open')
warndlg('串口已打开,请先关闭当前连接。', '端口忙');
return;
end
end
% 创建新的serial对象
try
s = serial(portName, 'BaudRate', baudRate);
set(s, 'DataBits', 8);
set(s, 'StopBits', 1);
set(s, 'Parity', 'none');
set(s, 'Terminator', 'LF'); % 设置行终止符
% 打开端口
fopen(s);
% 将serial对象保存至handles结构体中以便全局访问
handles.s = s;
guidata(hObject, handles); % 更新handles
% 更新UI状态显示
set(handles.statusLabel, 'String', ['端口 ', portName, ' 已打开']);
set(hObject, 'Enable', 'off'); % 禁用打开按钮
set(handles.closePortButton, 'Enable', 'on'); % 启用关闭按钮
catch ME
errordlg(['无法打开串口: ' ME.message], '串口错误');
set(handles.statusLabel, 'String', '串口打开失败');
end
end
代码逻辑逐行解读与参数说明:
- 第4–7行 :从下拉菜单控件中获取用户选择的串口号和波特率。
get(handles.comPortList, 'String')返回所有选项组成的元胞数组,'Value'属性返回当前选中的索引。 - 第10–16行 :检查是否存在有效的
serial对象且其状态为“open”。这是防止重复打开的关键防护措施。isvalid()函数判断句柄是否指向有效对象,get(s, 'Status')可返回'closed'或'open'。 - 第19–25行 :调用
serial()构造函数创建对象,并设置常用通信参数。其中: 'BaudRate':传输速率,单位为bps;'DataBits':数据位长度,通常为8;'StopBits':停止位数量,常见值为1或2;'Parity':校验模式,设为'none'表示无校验;'Terminator':接收数据时的结束标志,'LF'对应换行符\n。- 第28行 :调用
fopen(s)实际激活物理连接,触发底层驱动握手信号(如RTS/CTS)。 - 第31–32行 :将创建好的对象存入
handles结构体并通过guidata()持久化,使其他回调函数可访问该对象。 - 第35–37行 :更新界面状态标签,并禁用“打开”按钮以防止误操作,同时启用“关闭”按钮。
⚠️ 注意:直接将
serial对象存储在handles中是 MATLAB GUI 编程的标准做法,但需注意对象生命周期必须由程序员显式管理,否则可能导致内存泄漏或设备独占问题。
5.1.2 串口初始化状态机建模与流程控制
为清晰表达串口对象在GUI中的状态变化路径,我们引入有限状态机(Finite State Machine, FSM)进行建模。该模型有助于识别非法状态转移,增强程序健壮性。
stateDiagram-v2
[*] --> Closed
Closed --> Opening : 用户点击"打开"
state Opening {
[*] --> ValidateParams
ValidateParams --> CreateObject : 参数合法
CreateObject --> OpenPort
OpenPort --> Opened : 成功
OpenPort --> Error : 失败
Error --> Closed : 清理并重置
}
Opened --> Closing : 用户点击"关闭"
state Closing {
[*] --> FlushBuffer
FlushBuffer --> CloseHandle
CloseHandle --> Closed
}
Opened --> ErrorOccur : 接收超时/断线
ErrorOccur --> Closed : 自动清理
流程图解析:
- 初始状态为
Closed,表示无活动串口连接。 - 当用户点击“打开”按钮时进入
Opening子状态,依次经历参数验证、对象创建、端口打开三个步骤。 - 若任一环节出错(如端口被占用),则跳转至
Error并最终回到Closed。 - 成功打开后进入
Opened状态,允许发送/接收数据。 - 用户点击“关闭”按钮后进入
Closing流程,执行缓冲区清空与句柄释放。 - 异常情况(如设备突然拔出)会触发错误事件,程序应捕获并自动切换回
Closed状态。
这种状态机设计不仅提升了逻辑清晰度,也为后续添加自动重连、日志记录等功能提供了扩展基础。
5.1.3 跨平台串口命名一致性处理方案
不同操作系统对串口的命名规则存在差异,这给跨平台部署带来挑战。例如:
| 操作系统 | 串口命名格式 | 示例 |
|---|---|---|
| Windows | COM + 数字 | COM1, COM3 |
| Linux | /dev/ttyUSB 或 /dev/ttyS | /dev/ttyUSB0 |
| macOS | /dev/cu.* | /dev/cu.usbserial-A10KLCGI |
为实现统一识别,建议封装一个自动扫描函数,动态获取当前系统中可用的串口列表:
function portList = scanAvailableSerialPorts()
% 扫描当前系统中可用的串口设备
info = instrhwinfo('serial');
portList = info.Ports;
% 若未找到任何端口,尝试补充常见虚拟串口路径(Linux/macOS)
if isempty(portList)
candidates = {'/dev/ttyUSB*', '/dev/ttyACM*', '/dev/cu.*'};
for i = 1:length(candidates)
matches = glob(candidates{i});
portList = [portList; string(matches)];
end
end
% 去重并排序
portList = unique(portList);
end
参数说明与逻辑分析:
instrhwinfo('serial')是 MATLAB 提供的标准接口,用于查询本地串口硬件信息。glob()函数可用于通配符匹配文件路径,适用于非标准串口设备(如CH340、FTDI等USB转串芯片)。- 返回结果为字符串数组,可直接用于填充下拉菜单控件。
此函数可在 GUI 初始化时调用,并将结果填充至 comPortList 控件中,从而实现跨平台兼容的设备发现功能。
5.2 GUI中串口操作的并发控制与资源竞争规避
GUI环境本质上是多事件并发的系统。多个按钮、定时器、回调函数可能同时请求访问同一个串口资源,若不加以协调,极易引发资源竞争、数据混乱甚至程序崩溃。
5.2.1 基于互斥锁的串口访问同步机制
虽然 MATLAB 不提供原生的线程锁机制,但我们可以通过 handles 中的标志位模拟简单的互斥锁(Mutex),防止多个操作同时读写串口。
% 发送数据前加锁
function sendData_Callback(hObject, eventdata, handles)
% 检查是否已有操作正在进行
if isfield(handles, 'isBusy') && handles.isBusy
warndlg('系统正忙,请稍后再试。', '操作冲突');
return;
end
% 设置忙碌标志
handles.isBusy = true;
guidata(hObject, handles);
% 执行发送操作
dataToSend = get(handles.sendEdit, 'String');
try
fwrite(handles.s, dataToSend, 'char');
flushoutput(handles.s); % 确保数据立即发出
catch ME
errordlg(['发送失败: ' ME.message]);
end
% 释放锁
handles.isBusy = false;
guidata(hObject, handles);
end
关键点说明:
isBusy字段作为轻量级锁标识,任何需要访问串口的操作都必须先检查其状态。- 在操作开始前设为
true,结束后恢复为false,确保同一时间只有一个任务在运行。 - 此方法虽不能完全替代真正的多线程锁,但在大多数GUI应用场景中足以避免常见冲突。
5.2.2 定时器与串口轮询的协同工作机制
在实时监控类应用中,常需使用定时器定期读取串口数据。此时需特别注意定时器回调与其他操作的时序关系。
% 启动数据轮询定时器
function startPollingTimer(hObject, eventdata, handles)
if ~isfield(handles, 'timerObj') || ~isvalid(handles.timerObj)
t = timer('ExecutionMode', 'fixedRate', ...
'Period', 0.1, ... % 每100ms执行一次
'TimerFcn', {@pollSerialData}); % 回调函数
handles.timerObj = t;
guidata(hObject, handles);
end
start(handles.timerObj);
end
% 定时器回调:轮询接收数据
function pollSerialData(~, ~, handles)
if isfield(handles, 's') && isvalid(handles.s) && strcmp(get(handles.s, 'Status'), 'open')
if get(handles.s, 'BytesAvailable') > 0
data = fread(handles.s, get(handles.s, 'BytesAvailable'), 'uint8');
textData = char(data');
currentText = get(handles.receiveEdit, 'String');
updatedText = [currentText, textData];
set(handles.receiveEdit, 'String', updatedText);
% 自动滚动到底部
set(handles.receiveEdit, 'Scroll', 'bottom');
end
end
end
表格:定时器关键属性说明
| 属性名 | 值 | 说明 |
|---|---|---|
ExecutionMode |
'fixedRate' |
固定周期执行,适合稳定采样 |
Period |
0.1 |
执行间隔为100毫秒 |
TimerFcn |
函数句柄 | 实际执行的数据读取逻辑 |
StartDelay |
默认0 | 启动后立即开始 |
💡 提示:过短的
Period会导致CPU占用过高,一般建议不低于50ms;若使用回调模式(BytesAvailableFcn),则无需手动轮询。
5.3 串口关闭与资源释放的最佳实践
正确关闭串口不仅是释放硬件资源的必要步骤,更是保障系统稳定性和设备安全的关键操作。
5.3.1 安全关闭流程与缓冲区清理策略
function closePortButton_Callback(hObject, eventdata, handles)
if isfield(handles, 's') && isvalid(handles.s)
try
% 清空输入输出缓冲区
flushinput(handles.s);
flushoutput(handles.s);
% 关闭端口并删除对象
fclose(handles.s);
delete(handles.s);
% 清除handles引用
rmfield(handles, 's');
guidata(hObject, handles);
% 更新UI
set(handles.statusLabel, 'String', '端口已关闭');
set(handles.openPortButton, 'Enable', 'on');
set(hObject, 'Enable', 'off');
catch ME
errordlg(['关闭失败: ' ME.message]);
end
else
set(handles.statusLabel, 'String', '无活动串口');
end
end
操作顺序的重要性:
- flushinput/output :清除残留数据,防止下次打开时误读旧信息;
- fclose :断开物理连接,释放操作系统级别的句柄;
- delete :销毁 MATLAB 中的对象实例,回收内存;
- rmfield + guidata :从
handles中移除引用,避免悬空指针。
遗漏任一步骤都可能导致资源泄漏或下次连接失败。
5.3.2 程序退出时的自动清理钩子注册
即使用户未手动关闭串口,也应在程序退出时强制释放资源。可通过注册 CloseRequestFcn 实现:
set(gcf, 'CloseRequestFcn', @onCloseRequest);
function onCloseRequest(~, ~, handles)
if isfield(handles, 's') && isvalid(handles.s)
if strcmp(get(handles.s, 'Status'), 'open')
fclose(handles.s);
delete(handles.s);
end
end
clear global; % 清理全局变量
close(gcf); % 真正关闭窗口
end
该机制确保了无论正常退出还是意外中断,都能最大程度保护外设与主机系统的稳定性。
6. 错误处理机制与程序稳定性的高级编程策略
在现代工业自动化、嵌入式系统调试以及科研数据采集场景中,MATLAB作为强大的数据分析与交互平台,其串口通信功能常被用于连接传感器、PLC、单片机等外部设备。然而,在实际运行过程中,硬件异常、驱动问题、通信中断或配置错误等问题频繁发生,若缺乏健全的错误处理机制,极易导致程序崩溃、数据丢失甚至系统死锁。因此,构建一套完整的错误捕获、响应恢复和稳定性保障体系,是实现高可用性串口通信应用的核心要求。
本章节聚焦于 MATLAB环境下串口通信中的异常管理机制设计 ,深入剖析常见故障类型及其成因,并提出基于结构化异常处理、资源保护、状态监控与容错重连的综合性解决方案。通过引入try-catch-finally结构、事件回调诊断、超时控制优化以及日志记录策略,全面提升系统的鲁棒性和可维护性。此外,结合GUI环境下的多线程特性与用户交互反馈机制,进一步增强用户体验与系统透明度。
6.1 MATLAB串口通信中的典型错误类型与诊断方法
在进行串口通信开发时,开发者必须对可能出现的各类异常有充分的认知,才能针对性地设计防御机制。这些异常既可能来源于物理层(如线路断开),也可能来自协议层(如波特率不匹配),还可能由软件逻辑缺陷引发(如未释放句柄)。只有准确识别错误类型并定位根源,才能制定有效的应对策略。
6.1.1 常见串口通信错误分类及成因分析
从系统层级角度出发,可将串口通信中的错误划分为以下四类:
| 错误类别 | 典型表现 | 成因说明 |
|---|---|---|
| 硬件连接类错误 | fopen失败、COM端口无法打开 | 线缆松动、USB转串口驱动未安装、目标设备未供电 |
| 参数配置类错误 | 数据乱码、接收超时 | 波特率/数据位/校验位设置不一致,两端设备协议不兼容 |
| 资源管理类错误 | “Port is already in use” 报错 | 上次会话未正确关闭,serial对象残留 |
| 运行时异常 | 缓冲区溢出、读写阻塞 | 接收速率超过处理能力,缺乏轮询或异步机制 |
例如,当使用 fopen(s) 尝试打开一个已被其他进程占用的串口时,MATLAB将抛出如下错误信息:
Error using serial/fopen
The port is configured to allow only one connection at a time, and that connection is currently open.
这类错误属于典型的“资源竞争”问题,常见于调试阶段多次快速重启程序而未清理旧句柄的情况。
为有效诊断上述问题,MATLAB提供了多种内置工具。最基础的是利用 instrfind 函数查找当前存在的串口对象实例:
% 查找所有已打开的串口对象
existingPorts = instrfind({'Type'}, 'serial');
if ~isempty(existingPorts)
fclose(existingPorts); % 关闭所有现存串口
delete(existingPorts); % 删除对象以释放内存
end
代码逻辑逐行解读:
instrfind({'Type'}, 'serial'): 搜索工作空间中所有类型为’serial’的仪器对象,返回句柄数组。~isempty(...): 判断是否存在活动串口对象。fclose(existingPorts): 安全关闭所有已打开的串口连接,避免后续操作冲突。delete(existingPorts): 彻底销毁对象,防止内存泄漏。
该段代码常置于GUI初始化回调或主程序入口处,作为“预清理”步骤,极大降低了因资源残留导致的启动失败风险。
6.1.2 使用 try-catch 结构实现异常捕获与优雅降级
在MATLAB中, try-catch 语句是实现结构化异常处理的基础手段。它允许程序在出现错误时不直接中断执行流,而是跳转至预设的错误处理分支,从而实现更平滑的用户体验。
考虑如下发送数据的操作示例:
s = serial('COM3', 'BaudRate', 9600);
try
fopen(s);
fwrite(s, 'Hello Device', 'char');
fprintf('数据发送成功\n');
catch ME
fprintf('【错误】操作失败:%s\n', ME.message);
if strcmp(ME.identifier, 'MATLAB:serial:fopen:portAlreadyOpen')
warning('检测到端口已被占用,尝试强制释放...');
fclose(instrfind({'Port'}, 'COM3'));
elseif strcmp(ME.identifier, 'MATLAB:serial:fopen:invalidPort')
error('指定串口号无效,请检查设备连接状态');
else
warning('未知错误,建议重启MATLAB环境');
end
finally
if isvalid(s) && s.Status == 'open'
fclose(s);
end
delete(s);
end
流程图说明(mermaid):
graph TD
A[开始] --> B{创建serial对象}
B --> C[try块: 尝试打开并发送]
C --> D[fopen(s)]
D --> E[fwrite(s, data)]
E --> F[打印成功消息]
F --> G[进入finally]
C --> H[发生异常?]
H -->|是| I[转入catch块]
I --> J{判断错误ID}
J -->|portAlreadyOpen| K[调用fclose释放]
J -->|invalidPort| L[抛出致命错误]
J -->|其他| M[发出警告提示]
K --> G
G --> N{s是否有效且打开?}
N -->|是| O[fclose & delete]
N -->|否| P[跳过清理]
O --> Q[结束]
P --> Q
参数与逻辑解析:
- try块 :包含核心通信逻辑,任何在此区域内抛出的异常都会被立即捕获。
- ME (MException) :自动捕获的异常对象,包含
.message(人类可读描述)、.identifier(唯一错误编码)等关键字段。 - strcmp比较identifier :实现精确错误类型匹配,避免误判。例如
'MATLAB:serial:fopen:portAlreadyOpen'表示端口正被占用。 - finally块 :无论是否发生异常,都会执行的清理代码,确保资源安全释放。
此模式特别适用于生产级部署,即使面对不可预测的现场环境也能保持程序可控退出。
6.1.3 基于事件的日志记录与故障追踪机制
为了支持后期排错与系统审计,应建立完善的日志记录体系。可通过编写自定义日志函数,将关键操作与异常事件写入本地文件。
function logEvent(level, msg)
timestamp = datestr(now, 'yyyy-mm-dd HH:MM:SS');
logLine = sprintf('[%s] [%s] %s\n', timestamp, level, msg);
fid = fopen('serial_debug.log', 'a');
if fid ~= -1
fwrite(fid, logLine, 'char');
fclose(fid);
end
end
随后可在主流程中调用:
logEvent('INFO', 'Attempting to connect to COM3');
try
fopen(s);
logEvent('SUCCESS', 'Serial port opened successfully');
catch ME
logEvent('ERROR', ['Failed to open port: ', ME.message]);
end
该机制实现了操作轨迹的持久化存储,便于工程人员回溯问题时间线,提升维护效率。
6.2 超时控制与非阻塞通信的设计优化
串口通信本质上是一种同步I/O操作,若无合理的时间约束,程序可能陷入无限等待状态,严重影响整体响应性能。尤其是在GUI环境中,主线程被阻塞会导致界面“卡死”,用户体验极差。因此,必须对读写操作施加严格的超时控制,并尽可能采用非阻塞或异步方式提升系统实时性。
6.2.1 发送与接收超时参数的科学设定
MATLAB的 serial 对象提供两个关键属性用于控制通信时限:
Timeout: 控制fread等待完整数据到达的最大时间(单位:秒)WriteTimeout: 控制fwrite完成写入操作的最长时间
默认情况下,这两个值通常设为10秒,但在高速通信或低延迟需求场景下需调整:
s = serial('COM4');
set(s, 'BaudRate', 115200, 'Timeout', 2.5, 'WriteTimeout', 1.0);
参数说明表:
| 属性名 | 含义 | 推荐取值范围 | 应用场景 |
|---|---|---|---|
Timeout |
接收操作最大等待时间 | 1.0 ~ 5.0 秒 | 防止因设备无响应导致挂起 |
WriteTimeout |
发送操作最大耗时 | 0.5 ~ 2.0 秒 | 避免写缓冲区堆积 |
ReadAsyncMode |
异步读取模式(continuous/polling) | ‘continuous’ | 支持后台持续接收 |
当设置 Timeout=2.5 后,若调用 fread(s, 10) 但2.5秒内仅接收到6字节,则函数提前返回这6字节数据,并触发警告。因此,应用程序应具备处理部分读取结果的能力。
6.2.2 非阻塞读取模式的应用实践
为彻底规避主线程阻塞问题,推荐启用异步读取模式。通过设置 ReadAsyncMode 为 'continuous' ,并绑定 BytesAvailableFcn 回调函数,实现真正的后台监听。
s = serial('COM3', 'BaudRate', 9600);
set(s, 'ReadAsyncMode', 'continuous');
s.BytesAvailableFcnMode = 'terminator';
s.BytesAvailableFcn = @onDataReceived;
% 启动异步监听
fopen(s);
function onDataReceived(obj, event)
count = obj.BytesAvailable;
if count > 0
data = fread(obj, count, 'uint8');
str = char(data)';
fprintf('接收到数据: %s\n', str);
% 可在此更新GUI文本框
end
end
代码逻辑分析:
ReadAsyncMode='continuous':表示串口持续监听 incoming 数据,一旦有数据到达即触发事件。BytesAvailableFcnMode='terminator':也可设为'bytecount',决定触发条件。onDataReceived:回调函数原型,接受两个参数——对象句柄和事件类型。obj.BytesAvailable:查询当前缓冲区中有多少字节可供读取,避免盲目读取造成阻塞。
该方案广泛应用于需要高频采集的监测系统中,能显著降低CPU占用率并提升响应速度。
6.2.3 结合定时器实现周期性健康检查
为进一步提升系统健壮性,可在GUI中添加一个 timer 对象,定期检查串口连接状态:
t = timer('TimerFcn', @checkConnection, 'Period', 5, 'ExecutionMode', 'fixedRate');
start(t);
function checkConnection(~, ~)
s = handles.serialObj; % 假设串口对象保存在handles中
if isvalid(s) && s.Status == 'open'
% 可选:发送心跳包测试链路
else
set(handles.statusLabel.String, 'Disconnected');
stop(timerObj); % 停止自身
end
end
此类机制可用于自动检测意外断线并提示用户重新连接,极大增强了系统的自我感知能力。
7. 基于GUI的MATLAB串口通信完整项目实战流程
7.1 项目需求分析与系统架构设计
在本章中,我们将构建一个完整的、可运行的MATLAB GUI串口通信上位机应用。该系统将实现对微控制器(如STM32或Arduino)的数据采集与控制功能,适用于工业监控、传感器调试等实际场景。
项目核心功能需求如下:
| 功能模块 | 具体要求 |
|---|---|
| 串口配置 | 支持自动扫描可用串口,设置波特率(常见值预设),数据位/停止位/校验位可选 |
| 数据发送 | 支持ASCII和十六进制两种发送模式,带发送历史记录 |
| 实时接收 | 自动刷新显示接收到的数据,支持文本与Hex格式切换 |
| 数据保存 | 可将通信日志导出为 .txt 文件 |
| 错误提示 | 弹窗提示端口打开失败、超时、缓冲区溢出等问题 |
| 状态显示 | 显示当前连接状态、接收/发送字节数统计 |
系统采用MVC思想进行结构化设计:
graph TD
A[GUI界面层] --> B[逻辑控制层]
B --> C[串口对象管理层]
C --> D[硬件串口设备]
D --> C
C --> E[数据缓存与事件回调]
E --> A
F[定时器轮询] --> B
整个系统的数据流以 BytesAvailableFcn 事件驱动为主,辅以手动发送触发,确保实时性与交互灵活性兼顾。
7.2 GUI界面搭建与控件布局规划
使用MATLAB GUIDE创建主界面窗口,关键控件及其命名约定如下:
| 控件类型 | Tag名称 | 功能说明 |
|---|---|---|
| Push Button | btnOpenPort | 打开/关闭串口 |
| Popup Menu | popBaudRate | 波特率选择(9600, 115200等) |
| Listbox | lstPorts | 显示可用COM端口列表 |
| Edit Text | edtSendData | 用户输入待发送数据 |
| Check Box | chkHexSend | 启用十六进制发送模式 |
| Static Text | lblStatus | 显示串口连接状态 |
| Axes | axPlot | (扩展功能)用于绘制传感器数据曲线 |
| Panel | pnlDisplayMode | 分组按钮:Text / Hex 显示模式 |
布局遵循“左配置、右数据显示”原则,提升用户体验一致性。
初始化函数 serial_gui_OpeningFcn 中添加以下代码用于动态获取串口列表:
function serial_gui_OpeningFcn(hObject, eventdata, handles)
% 动态扫描可用串口并填充到Listbox
portList = instrfind({'Type'}, {'serial'});
availablePorts = (1:4); % 默认尝试COM1-COM4
validPorts = {};
for i = availablePorts
try
s = serial(['COM', num2str(i)]);
if ~isvalid(s)
fclose(s); delete(s);
else
validPorts{end+1} = ['COM', num2str(i)];
end
catch
continue
end
end
set(handles.lstPorts, 'String', validPorts);
set(handles.popBaudRate, 'String', {'9600', '19200', '115200'});
set(handles.popBaudRate, 'Value', 3); % 默认115200
set(handles.lblStatus, 'String', '未连接');
handles.serialObj = [];
guidata(hObject, handles);
end
参数说明:
-instrfind:查找当前已存在的串口对象
-serial(['COM',num2str(i)]):构造串口对象尝试连接
-guidata:保存handles结构体供回调函数共享使用
此段代码实现了硬件资源探测与UI初始化同步,避免因硬编码导致兼容性问题。
7.3 核心通信逻辑实现与回调绑定
7.3.1 串口打开与参数配置
当用户点击“打开串口”按钮时,执行以下逻辑:
function btnOpenPort_Callback(hObject, eventdata, handles)
selection = get(handles.lstPorts, 'Value');
portName = get(handles.lstPorts, 'String');
baudRateStr = get(handles.popBaudRate, 'String');
baudRate = str2double(baudRateStr(get(handles.popBaudRate, 'Value')));
if isempty(handles.serialObj)
try
s = serial(portName{selection}, 'BaudRate', baudRate, ...
'DataBits', 8, 'StopBits', 1, 'Parity', 'none');
set(s, 'BytesAvailableFcn', {@bytesAvailableCallback, handles});
fopen(s);
set(hObject, 'String', '关闭串口');
set(handles.lblStatus, 'String', [portName{selection}, ' @ ', num2str(baudRate)]);
handles.serialObj = s;
guidata(hObject, handles);
catch ME
errordlg(['无法打开串口: ', ME.message], '串口错误');
end
else
fclose(handles.serialObj);
delete(handles.serialObj);
set(hObject, 'String', '打开串口');
set(handles.lblStatus, 'String', '已断开');
handles.serialObj = [];
guidata(hObject, handles);
end
end
7.3.2 接收回调函数实现
定义独立的回调函数处理数据到达事件:
function bytesAvailableCallback(src, event, handles)
count = src.BytesAvailable;
if count > 0
data = fread(src, count, 'uint8'); % 二进制读取
displayMode = get(handles.grpDisplay, 'SelectedObject');
if strcmp(get(displayMode, 'Tag'), 'btnHexView')
hexStr = upper(sprintf('%02X ', data));
currentText = get(handles.edtRecvData, 'String');
set(handles.edtRecvData, 'String', [currentText, hexStr, char(10)]);
else
textStr = char(data');
currentText = get(handles.edtRecvData, 'String');
set(handles.edtRecvData, 'String', [currentText, textStr]);
end
% 滚动到底部
pos = get(handles.edtRecvData, 'Position');
set(handles.edtRecvData, 'VerticalScrollPosition', 'bottom');
% 更新接收计数
recvCount = str2double(get(handles.lblRecvBytes, 'String')) + length(data);
set(handles.lblRecvBytes, 'String', num2str(recvCount));
end
end
该回调函数通过 BytesAvailableFcn 注册,在每次有新数据到达时自动触发,保证了高实时性的数据捕获能力。
简介:MATLAB中的串口通信是实现硬件交互与控制系统开发的重要技术。本文详细介绍如何使用MATLAB的serial对象进行串口通信,涵盖串口参数设置、数据读写及资源释放等核心操作,并结合GUIDE工具构建图形用户界面(GUI),实现发送与接收功能的可视化。通过回调函数控制数据传输与显示,提升程序交互性与实用性,适用于各类设备通信项目。文章还强调了错误处理与程序稳定性等关键问题,帮助开发者快速掌握MATLAB串口应用开发全流程。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 10
10 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)