
嵌入式操作系统VxWorks原理与实战研究
嵌入式系统是指专为特定功能设计的计算机系统,通常嵌入在更大的设备或系统中,具备低功耗、小体积、高稳定性等特点。根据功能与实时性需求,嵌入式系统可分为实时系统与非实时系统,广泛应用于工业控制、智能家居、车载系统和医疗设备等领域。嵌入式操作系统(RTOS)是嵌入式系统的核心,负责任务调度、内存管理、设备驱动和中断响应等关键功能。其核心价值在于提供高效的资源管理和确定性的实时响应能力,确保系统在严格的时

简介:嵌入式操作系统是计算机科学的重要分支,广泛应用于工业控制、通信、医疗和航空航天等领域。VxWorks作为一款主流实时操作系统(RTOS),以其硬实时性、微内核架构和强大的多任务调度能力著称。本文围绕VxWorks的核心特性展开,涵盖事件驱动机制、设备驱动开发、网络支持、GUI设计、BSP移植等内容,并结合多篇技术论文深入分析其在实际项目中的应用。通过本论文学习,读者可全面掌握VxWorks系统设计原理与开发实践,为嵌入式实时系统开发打下坚实基础。 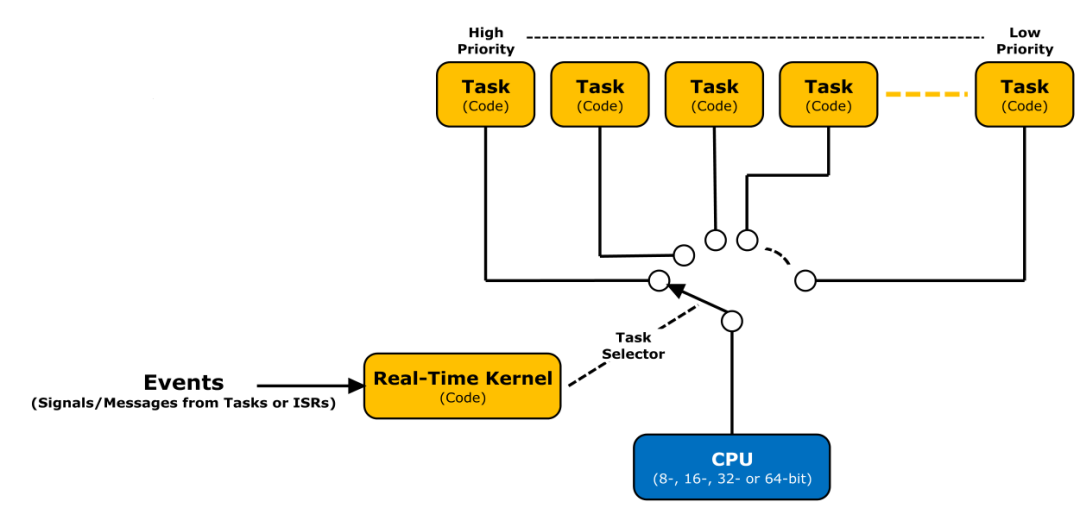
1. 嵌入式操作系统概述
嵌入式系统是指专为特定功能设计的计算机系统,通常嵌入在更大的设备或系统中,具备低功耗、小体积、高稳定性等特点。根据功能与实时性需求,嵌入式系统可分为实时系统与非实时系统,广泛应用于工业控制、智能家居、车载系统和医疗设备等领域。
嵌入式操作系统(RTOS)是嵌入式系统的核心,负责任务调度、内存管理、设备驱动和中断响应等关键功能。其核心价值在于提供高效的资源管理和确定性的实时响应能力,确保系统在严格的时间约束下可靠运行。
目前主流嵌入式操作系统包括VxWorks、FreeRTOS、QNX、μC/OS等,它们在实时性、可移植性和开发支持方面各有优势,为不同应用场景提供了多样化的选择。
2. VxWorks实时操作系统简介
2.1 VxWorks系统架构概述
VxWorks 是由美国 Wind River 公司开发的一款高性能、强实时的嵌入式操作系统,广泛应用于工业控制、通信设备、航空航天等对实时性要求极高的领域。其架构设计融合了微内核与可扩展模块化的思想,支持多任务调度、实时响应、高效资源管理等关键功能。
2.1.1 内核与系统组件结构
VxWorks 的核心是其名为 Wind 内核 的微内核系统。Wind 内核负责最基本的任务调度、中断处理、时间管理、任务通信和同步等机制。整个系统架构由以下几个主要组件构成:
| 组件名称 | 功能描述 |
|---|---|
| Wind 内核 | 提供任务调度、信号量、消息队列、事件机制等实时操作系统核心服务 |
| I/O 子系统 | 支持多种设备驱动接口,包括串口、网络、文件系统等 |
| 网络协议栈 | 集成完整的 TCP/IP 协议栈,支持 IPv4/IPv6,提供网络通信能力 |
| 文件系统 | 支持多种文件系统类型,如 dosFs、rawFs、NFS 等 |
| 板级支持包(BSP) | 提供硬件抽象层,使操作系统能够适配不同处理器平台 |
| 应用程序接口(API) | 提供 POSIX 兼容接口,便于应用程序开发和移植 |
以下是 VxWorks 系统架构的 mermaid 流程图示意:
graph TD
A[VxWorks 操作系统] --> B(Wind 内核)
A --> C(I/O 子系统)
A --> D(网络协议栈)
A --> E(文件系统)
A --> F(BSP)
B --> G[任务调度]
B --> H[中断处理]
B --> I[事件机制]
C --> J[串口通信]
C --> K[设备驱动]
D --> L[TCP/IP]
D --> M[IPv6 支持]
E --> N[dosFs]
E --> O[NFS]
2.1.2 实时性支持机制
VxWorks 的核心优势之一是其强大的实时性支持。它通过以下机制确保任务能够在规定时间内得到响应:
- 抢占式优先级调度 :高优先级任务可以中断低优先级任务的执行,从而确保关键任务优先响应。
- 确定性调度算法 :Wind 内核采用确定性调度策略,任务调度时间可预测。
- 低中断延迟 :内核对中断处理进行了高度优化,使得中断响应时间极短。
- 事件与信号量机制 :任务间通信通过事件和信号量实现,支持快速同步与异步通信。
例如,以下是一段 VxWorks 下创建两个任务,并设置不同优先级进行抢占调度的代码示例:
#include "vxWorks.h"
#include "taskLib.h"
#include "stdio.h"
void task1()
{
while (1)
{
printf("Task1 running...\n");
taskDelay(100); // 延迟100个tick
}
}
void task2()
{
while (1)
{
printf("Task2 running!!!\n");
taskDelay(50); // 延迟50个tick
}
}
void createTasks()
{
// 创建任务,优先级分别为100和90(数值越小优先级越高)
taskSpawn("t1", 100, 0, 20000, (FUNCPTR)task1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0);
taskSpawn("t2", 90, 0, 20000, (FUNCPTR)task2, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0);
}
代码逻辑分析与参数说明:
taskSpawn:用于创建任务,参数包括任务名、优先级、选项、堆栈大小及入口函数等。"t1"和"t2":任务名称,用于调试识别。100和90:任务优先级,数字越小优先级越高,因此task2将优先于task1执行。20000:堆栈大小,单位为字节。taskDelay(n):延迟 n 个 tick(系统时钟节拍),用于模拟任务执行时间。
通过此机制,VxWorks 能够在复杂环境中确保关键任务的实时响应。
2.2 VxWorks的开发环境与工具链
VxWorks 提供了完整的开发环境和工具链,支持从代码编写、编译、调试到部署的全过程。
2.2.1 Tornado开发平台
Tornado 是 VxWorks 的集成开发环境(IDE),由 Wind River 公司开发。它基于 Eclipse 架构,集成了项目管理、源码编辑、编译链接、调试仿真等功能,极大地提升了开发效率。
Tornado 的主要特点包括:
- 多平台支持 :支持 Windows 和 Linux 系统。
- 可视化调试 :支持源码级调试,断点设置,变量监视等功能。
- 项目管理 :支持 BSP 工程、应用工程、内核配置工程等多类型项目构建。
- 仿真器支持 :集成 Wind River Simics 等仿真工具,便于无硬件环境下的开发。
以下是一个 Tornado 项目创建流程的简要示意:
graph LR
A[启动 Tornado IDE] --> B[创建新项目]
B --> C{项目类型}
C -->|BSP工程| D[配置硬件平台]
C -->|应用程序| E[添加任务代码]
C -->|内核定制| F[选择组件]
D --> G[编译生成镜像]
E --> G
F --> G
G --> H[下载到目标机]
2.2.2 编译器与调试工具
VxWorks 支持多种编译器工具链,主要包括:
- GNU 工具链(GCC) :开源工具链,支持多种架构。
- Diab 编译器 :Wind River 自研编译器,优化性能好,适合商业项目。
调试工具方面,Tornado 内置了:
- gdbserver :远程调试服务,支持与主机端 GDB 通信。
- WindView :性能分析工具,支持任务调度、中断响应、内存使用等实时数据可视化。
以下是一个简单的 GDB 调试示例代码:
#include "vxWorks.h"
#include "taskLib.h"
void debugTask()
{
int i = 0;
while (1)
{
i++;
if (i > 1000000)
{
i = 0;
printf("Counter reset\n");
}
}
}
void startDebug()
{
taskSpawn("dbgTask", 100, 0, 20000, (FUNCPTR)debugTask, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0);
}
代码逻辑分析与参数说明:
debugTask:一个无限循环任务,计数器i不断自增。if (i > 1000000):用于模拟条件断点,当计数器超过百万时重置。taskSpawn:启动任务,优先级为 100,堆栈大小为 20000 字节。
在 Tornado 中设置断点并运行调试,可以观察 i 的变化情况,帮助开发者分析任务执行路径和资源占用。
2.3 VxWorks在嵌入式系统中的典型应用场景
由于其优异的实时性和稳定性,VxWorks 被广泛应用于多个关键领域。
2.3.1 工业自动化控制
在工业自动化领域,VxWorks 被用于 PLC(可编程逻辑控制器)、机器人控制、传感器网络等系统中,确保生产线的实时响应与高可靠性。
例如,在一个基于 VxWorks 的工业控制系统中,主控任务负责协调多个子任务,如传感器采集、执行机构控制、状态监控等:
void controlTask()
{
while (1)
{
readSensors(); // 读取传感器数据
processControl(); // 控制执行机构
checkStatus(); // 监控系统状态
taskDelay(10); // 延迟10个tick
}
}
逻辑分析与参数说明:
readSensors():模拟读取传感器数据。processControl():根据传感器数据进行控制输出。checkStatus():检查系统是否处于异常状态。taskDelay(10):控制循环频率,确保任务周期执行。
2.3.2 网络通信设备
在路由器、交换机、基站控制器等通信设备中,VxWorks 提供了高效的网络协议栈和任务调度机制,确保数据包的低延迟处理和高吞吐量。
以下是一个网络任务示例,用于接收并处理数据包:
void networkTask()
{
char buffer[1024];
while (1)
{
if (recvData(buffer, sizeof(buffer)) > 0)
{
processData(buffer); // 处理收到的数据
}
taskDelay(5); // 短暂延迟
}
}
逻辑分析与参数说明:
recvData:模拟接收网络数据函数。processData:数据处理函数。taskDelay(5):释放 CPU 资源,防止任务长时间占用。
2.3.3 航空航天与军事系统
在航空航天和军事系统中,如飞行控制系统、雷达、导弹制导系统等,VxWorks 因其硬实时性和高可靠性成为首选操作系统。
例如,在一个飞行控制系统中,VxWorks 用于实时处理传感器数据、控制飞行姿态、执行紧急响应机制:
void flightControlTask()
{
while (1)
{
readIMU(); // 读取惯性测量单元数据
computeAttitude(); // 计算飞行姿态
adjustControlSurface(); // 调整舵面
taskDelay(1); // 极短延迟,确保高频响应
}
}
逻辑分析与参数说明:
readIMU():读取飞行姿态传感器数据。computeAttitude():进行姿态计算。adjustControlSurface():控制飞机舵面。taskDelay(1):确保任务每秒执行多次,响应迅速。
VxWorks 在这些高风险、高精度领域中,凭借其卓越的实时表现和稳定性,成为行业标准。
3. 实时性与硬实时调度机制
实时系统的核心价值在于其对时间的严格响应能力,而硬实时系统更是在任务执行的时间约束上具有不可妥协的要求。VxWorks作为业界广泛使用的硬实时操作系统(RTOS),其在任务调度和实时性保障方面的机制设计尤为关键。本章将从实时系统的定义与分类入手,逐步深入VxWorks中的任务调度策略,并对硬实时调度算法进行系统性分析,帮助读者理解VxWorks如何在复杂环境下保障任务的实时响应与系统稳定性。
3.1 实时系统的定义与分类
实时系统是一种能够在预定时间内完成任务处理的计算机系统,其核心特征是 时间约束性 。根据对时间约束的容忍程度,实时系统可分为软实时系统和硬实时系统。
3.1.1 软实时与硬实时的区别
| 特性 | 软实时系统 | 硬实时系统 |
|---|---|---|
| 时间约束容忍度 | 允许一定程度的延迟 | 严格不可延迟 |
| 应用场景 | 多媒体播放、在线交易系统 | 工业控制、航空航天、医疗设备 |
| 错误后果 | 可容忍部分错误或延迟 | 一旦错过截止时间可能导致系统失效 |
| 系统设计复杂度 | 相对较低 | 设计复杂,需高度优化与验证 |
| 实时性保障机制 | 基于优先级调度与时间片轮转 | 强调抢占式调度、确定性行为 |
| 调度算法要求 | 动态调整、灵活 | 固定优先级、静态分析 |
软实时系统如视频会议、流媒体播放等,虽然也强调响应时间,但偶尔的延迟不会造成严重后果。而硬实时系统如飞机飞控、工业自动化等,若未能在指定时间内完成任务,可能导致灾难性后果。
3.1.2 实时系统的性能评估指标
实时系统的性能评估主要依赖以下几个关键指标:
- 响应时间(Response Time) :从任务被触发到其完成所需的时间。
- 调度延迟(Scheduling Latency) :从高优先级任务就绪到被调度执行的时间间隔。
- 截止时间(Deadline) :任务必须完成的最后时刻。
- 抖动(Jitter) :任务执行时间的波动程度。
- 吞吐量(Throughput) :单位时间内系统处理的任务数量。
- 可预测性(Predictability) :任务执行时间是否可预测,是否具有确定性。
这些指标构成了实时系统性能评估的核心维度。VxWorks正是通过高度优化的调度机制和内核设计,确保了在硬实时场景下的响应时间最短、调度延迟最小、抖动最低,从而满足对实时性的苛刻要求。
3.2 VxWorks中的任务调度策略
VxWorks的调度机制是其硬实时能力的基石。它支持多种调度策略,以适应不同应用场景下的实时性需求。
3.2.1 抢占式优先级调度
VxWorks采用 抢占式优先级调度(Preemptive Priority-Based Scheduling) ,这是硬实时系统中最常用的调度策略之一。其核心思想是:系统中每个任务都有一个固定的优先级,当一个高优先级任务进入就绪状态时,会立即抢占当前正在运行的低优先级任务。
代码示例:
#include "vxWorks.h"
#include "taskLib.h"
#define TASK_PRIORITY_HIGH 100
#define TASK_PRIORITY_LOW 150
void highPriorityTask()
{
while (1)
{
printf("High priority task is running\n");
taskDelay(10); // 模拟任务执行
}
}
void lowPriorityTask()
{
while (1)
{
printf("Low priority task is running\n");
taskDelay(20);
}
}
void createTasks()
{
TASK_ID highTaskId = taskSpawn("tHigh", TASK_PRIORITY_HIGH, 0, 2000, (FUNCPTR)highPriorityTask, 0,0,0,0,0,0,0,0,0,0);
TASK_ID lowTaskId = taskSpawn("tLow", TASK_PRIORITY_LOW, 0, 2000, (FUNCPTR)lowPriorityTask, 0,0,0,0,0,0,0,0,0,0);
}
逻辑分析:
taskSpawn用于创建任务,传入的第三个参数为优先级,数值越小优先级越高。highPriorityTask的优先级为100,lowPriorityTask为150,因此前者优先级更高。- 当
highPriorityTask处于运行状态时,即使lowPriorityTask正在执行,也会被抢占。 taskDelay用于模拟任务执行时间,避免任务无限运行导致系统资源耗尽。
优势与适用场景:
- 高优先级任务可以立即响应外部事件。
- 适用于中断处理、控制系统等对响应时间要求极高的场景。
3.2.2 时间片轮转调度
VxWorks还支持 时间片轮转调度(Round-Robin Scheduling) ,用于同一优先级的任务之间公平分配CPU时间。该机制通过设置时间片长度(time slice),在相同优先级的任务之间进行轮流调度。
代码示例:
#include "vxWorks.h"
#include "taskLib.h"
#define TASK_PRIORITY_EQUAL 100
#define TIME_SLICE 50
void taskA()
{
while (1)
{
printf("Task A is running\n");
taskDelay(10);
}
}
void taskB()
{
while (1)
{
printf("Task B is running\n");
taskDelay(10);
}
}
void createEqualTasks()
{
taskSpawn("tA", TASK_PRIORITY_EQUAL, VX_ROUND_ROBIN, 2000, (FUNCPTR)taskA, 0,0,0,0,0,0,0,0,0,0);
taskSpawn("tB", TASK_PRIORITY_EQUAL, VX_ROUND_ROBIN, 2000, (FUNCPTR)taskB, 0,0,0,0,0,0,0,0,0,0);
// 设置时间片长度
taskTimeSliceSet(TIME_SLICE);
}
逻辑分析:
- 两个任务使用相同的优先级(100)并设置了
VX_ROUND_ROBIN标志,启用时间片轮转机制。 taskTimeSliceSet设置每个任务可运行的时间片长度为50 ticks。- 每个任务运行一段时间后,会被调度器挂起,让另一个任务运行。
优势与适用场景:
- 同优先级任务之间公平分配CPU资源。
- 适用于多个后台任务并行运行的场景,如数据采集、日志记录等。
3.2.3 调度延迟与响应时间优化
VxWorks通过多种机制降低调度延迟与响应时间:
- 中断嵌套支持 :允许高优先级中断打断低优先级中断处理,缩短中断响应时间。
- 优先级继承机制 :防止优先级反转问题,确保高优先级任务不会被低优先级任务阻塞。
- 低延迟调度器设计 :内核调度器采用快速查找算法,提升任务切换效率。
优化示例:优先级继承机制
#include "vxWorks.h"
#include "semLib.h"
#include "taskLib.h"
SEM_ID sem;
void highPriorityTask()
{
while (1)
{
semTake(sem, WAIT_FOREVER); // 尝试获取信号量
printf("High Priority Task using shared resource\n");
semGive(sem); // 释放信号量
taskDelay(10);
}
}
void lowPriorityTask()
{
while (1)
{
semTake(sem, WAIT_FOREVER);
printf("Low Priority Task using shared resource\n");
semGive(sem);
taskDelay(100);
}
}
void createTasksWithSemaphore()
{
sem = semMCreate(SEM_Q_PRIORITY | SEM_INVERSION_SAFE); // 启用优先级继承
taskSpawn("tHigh", 100, 0, 2000, (FUNCPTR)highPriorityTask, 0,0,0,0,0,0,0,0,0,0);
taskSpawn("tLow", 150, 0, 2000, (FUNCPTR)lowPriorityTask, 0,0,0,0,0,0,0,0,0,0);
}
逻辑分析:
semMCreate使用SEM_INVERSION_SAFE标志启用优先级继承机制。- 当高优先级任务等待低优先级任务持有的信号量时,系统会临时提升低优先级任务的优先级,使其尽快释放资源。
- 这种机制防止了优先级反转问题,从而减少高优先级任务的阻塞时间。
3.3 硬实时调度算法分析
硬实时调度算法是保障系统实时性的理论基础。VxWorks的调度机制正是基于这些经典算法的实现。
3.3.1 最早截止时间优先(EDF)
最早截止时间优先(Earliest Deadline First, EDF)是一种动态优先级调度算法,任务的优先级根据其截止时间动态调整。截止时间越近的任务优先级越高。
调度流程图(Mermaid):
graph TD
A[任务就绪] --> B{是否截止时间最近?}
B -->|是| C[调度该任务]
B -->|否| D[等待]
C --> E[任务执行]
E --> F[任务完成]
F --> G[更新任务队列]
G --> A
特点:
- 适用于周期性和非周期性任务。
- 调度效率高,适合多任务动态环境。
- 但实现复杂,需不断调整任务优先级。
3.3.2 固定优先级调度(Rate-Monotonic Scheduling)
固定优先级调度(Rate-Monotonic Scheduling, RMS)是一种静态调度算法,任务优先级与其周期成反比:周期越短的任务优先级越高。
RMS调度流程图(Mermaid):
graph TD
H[系统初始化] --> I[分配任务优先级]
I --> J[任务按周期排序]
J --> K[周期短任务优先级高]
K --> L[调度器按优先级执行]
L --> M[任务执行]
M --> N[返回调度器]
特点:
- 适用于周期性任务。
- 调度确定性强,易于分析与验证。
- 但灵活性差,无法处理非周期任务。
3.3.3 多任务调度冲突与死锁预防机制
在多任务环境中,任务之间可能因共享资源访问而发生调度冲突,甚至出现死锁。VxWorks通过以下机制进行预防:
- 资源互斥访问 :使用信号量、互斥锁等机制确保资源独占访问。
- 优先级继承 :防止低优先级任务长时间持有资源导致高优先级任务阻塞。
- 死锁检测与恢复机制 :系统可配置检测死锁状态并进行任务重启或资源释放。
死锁检测流程图(Mermaid):
graph TD
O[任务A请求资源1] --> P[资源1被任务B持有]
P --> Q[任务B请求资源2]
Q --> R[资源2被任务C持有]
R --> S[任务C请求资源1]
S --> T[检测到循环等待]
T --> U[触发死锁恢复机制]
U --> V[释放资源或终止任务]
代码示例:使用互斥锁避免死锁
#include "vxWorks.h"
#include "semLib.h"
#include "taskLib.h"
SEM_ID mutex;
void taskOne()
{
while (1)
{
semTake(mutex, WAIT_FOREVER);
printf("Task One: Using Resource A\n");
semTake(mutex, WAIT_FOREVER); // 模拟嵌套锁
printf("Task One: Using Resource B\n");
semGive(mutex);
semGive(mutex);
taskDelay(100);
}
}
void taskTwo()
{
while (1)
{
semTake(mutex, WAIT_FOREVER);
printf("Task Two: Using Resource B\n");
semTake(mutex, WAIT_FOREVER);
printf("Task Two: Using Resource A\n");
semGive(mutex);
semGive(mutex);
taskDelay(100);
}
}
void createDeadlockTasks()
{
mutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE);
taskSpawn("t1", 100, 0, 2000, (FUNCPTR)taskOne, 0,0,0,0,0,0,0,0,0,0);
taskSpawn("t2", 110, 0, 2000, (FUNCPTR)taskTwo, 0,0,0,0,0,0,0,0,0,0);
}
逻辑分析:
- 使用
semMCreate创建互斥锁,并启用优先级保护和删除安全机制。 - 任务A和任务B交叉请求资源,模拟死锁场景。
- 内核通过优先级继承机制避免死锁发生。
本章深入剖析了实时系统的定义、VxWorks的任务调度机制及其背后的调度算法。通过对抢占式调度、时间片轮转、优先级继承等机制的代码示例与流程图解析,读者可清晰理解VxWorks如何在复杂多任务环境中保障硬实时性。下一章节将探讨微内核架构的设计与实现,进一步揭示VxWorks的系统结构优势。
4. 微内核架构设计与实现
微内核(Microkernel)架构作为现代嵌入式操作系统设计中的关键理念之一,以其模块化、高安全性、易扩展和高稳定性等优势,在实时系统中发挥着不可替代的作用。VxWorks 作为广泛应用于航空航天、工业控制和通信设备等关键领域的实时操作系统,其微内核架构设计在性能与可靠性之间实现了良好的平衡。本章将深入剖析微内核与宏内核的架构差异,探讨 VxWorks 微内核的核心机制,并分析其在嵌入式系统中的实现优势与实际应用案例。
4.1 微内核与宏内核的对比
4.1.1 架构设计原理
微内核与宏内核是操作系统内核的两种基本架构模式,其核心区别在于功能模块的划分与运行空间的不同。
| 特性 | 微内核 | 宏内核 |
|---|---|---|
| 核心功能 | 仅保留基本任务调度、进程间通信(IPC)和内存管理 | 包含完整的系统服务(文件系统、驱动、网络协议栈等) |
| 模块化 | 服务模块运行在用户空间,通过IPC通信 | 所有模块运行在内核空间 |
| 性能 | 由于IPC频繁调用,性能相对较低 | 系统调用直接在内核完成,性能更高 |
| 安全性 | 模块崩溃不会影响内核,系统更稳定 | 内核模块崩溃可能导致系统崩溃 |
| 可扩展性 | 易于添加或移除服务模块 | 扩展需修改内核代码,复杂度高 |
从架构设计角度出发,微内核将非核心功能如文件系统、网络协议栈等剥离出内核,运行于用户空间。这样做的好处是提高了系统的稳定性和可维护性,但代价是增加了 IPC 通信的开销。
4.1.2 安全性与稳定性分析
在嵌入式系统中,尤其是实时控制系统,系统的稳定性和容错能力至关重要。微内核通过隔离核心功能与外围服务,有效降低了内核崩溃的风险。
- 安全性提升 :由于非核心服务运行在用户态,即使某一服务模块崩溃,也不会直接影响内核的运行。
- 故障隔离能力强 :微内核设计允许系统将故障限制在特定模块,避免系统整体瘫痪。
- 权限控制更细粒度 :用户空间模块拥有更小的权限范围,提升了系统的安全性。
相比之下,宏内核一旦某个模块(如驱动程序)出现错误,可能直接导致整个系统崩溃。这也是为何在航空航天、工业控制等对可靠性要求极高的场景中,微内核架构更受青睐的原因之一。
4.2 VxWorks微内核机制
4.2.1 核心功能模块划分
VxWorks 的微内核架构将操作系统划分为多个独立的模块,每个模块只承担特定的功能,并通过 IPC 机制进行通信。
VxWorks 微内核的主要核心模块包括:
- 任务管理(Task Management) :负责任务的创建、调度、销毁。
- 中断管理(Interrupt Management) :处理硬件中断,确保实时响应。
- 内存管理(Memory Management) :负责内存的分配与回收,支持虚拟内存机制。
- 进程间通信(IPC) :包括消息队列、信号量、事件组等机制。
- 调度器(Scheduler) :采用抢占式优先级调度,支持硬实时调度。
这些核心模块构成了 VxWorks 微内核的基石,其余功能如网络协议栈、文件系统等作为可选组件运行于用户空间。
4.2.2 任务间通信(IPC)机制
VxWorks 提供了丰富的 IPC 机制来支持模块间的通信,主要包括:
- 消息队列(Message Queue)
- 信号量(Semaphore)
- 事件组(Event Group)
- 共享内存(Shared Memory)
下面以消息队列为例,展示 VxWorks 中的 IPC 使用方式:
#include <vxWorks.h>
#include <msgQLib.h>
#define MSG_LENGTH 20
#define MSG_COUNT 10
MSG_Q_ID msgQId;
void senderTask(void)
{
char message[MSG_LENGTH] = "Hello from sender!";
msgQSend(msgQId, message, MSG_LENGTH, WAIT_FOREVER, MSG_PRI_NORMAL);
}
void receiverTask(void)
{
char message[MSG_LENGTH];
msgQReceive(msgQId, message, MSG_LENGTH, WAIT_FOREVER);
printf("Received message: %s\n", message);
}
void createMessageQueue(void)
{
msgQId = msgQCreate(MSG_COUNT, MSG_LENGTH, MSG_Q_FIFO);
if (msgQId == NULL)
printf("Failed to create message queue.\n");
}
代码逻辑分析 :
- msgQCreate :创建一个消息队列,最多可容纳
MSG_COUNT个消息,每个消息长度为MSG_LENGTH,采用 FIFO 排队方式。 - msgQSend :发送消息到队列中,
WAIT_FOREVER表示如果队列满则等待直到可用。 - msgQReceive :从队列中接收消息,同样采用阻塞方式等待消息到达。
参数说明 :
MSG_Q_FIFO:先进先出的排队策略。MSG_PRI_NORMAL:普通优先级的消息发送。WAIT_FOREVER:表示任务在发送或接收消息时,若队列无消息或已满,则无限期等待。
VxWorks 的 IPC 机制不仅支持模块间通信,还为任务调度和资源管理提供了灵活的协同机制。
4.3 微内核在嵌入式系统中的实现优势
4.3.1 模块化扩展能力
微内核的最大优势之一是其高度模块化的设计。VxWorks 的组件可以按需加载,开发者可以根据具体应用需求选择启用或关闭某些功能模块,从而实现系统的最小化部署。
例如,VxWorks 支持通过 Wind River 的 Workbench 工具进行模块化配置,开发者可以在图形界面中选择需要的功能组件,如网络协议栈、文件系统、图形库等。
模块化配置的优势 :
- 减少系统占用空间 :仅加载必要的模块,节省宝贵的嵌入式资源。
- 提高系统灵活性 :不同项目可基于同一内核快速构建定制化系统。
- 便于维护与升级 :模块独立,便于定位问题和更新功能。
4.3.2 内存占用与性能优化
虽然微内核因 IPC 通信导致性能开销,但 VxWorks 在设计上做了大量优化,以减少 IPC 的延迟和资源消耗。
- 快速消息传递机制 :VxWorks 的 IPC 实现采用了高效的内核机制,减少上下文切换开销。
- 内存管理优化 :通过静态内存分配和动态内存池机制,提高内存使用效率。
- 裁剪机制 :根据应用场景裁剪内核,降低内存占用。
下面展示一个内存分配的示例:
#include <vxWorks.h>
#include <memPartLib.h>
MEM_PART_ID myMemPool;
void createMemoryPool(void)
{
myMemPool = memPartCreate((char *)malloc(1024 * 1024), 1024 * 1024);
if (myMemPool == NULL)
printf("Failed to create memory pool.\n");
}
void* allocateMemory(size_t size)
{
return memPartAlloc(myMemPool, size);
}
void freeMemory(void* ptr)
{
memPartFree(myMemPool, ptr);
}
代码逻辑分析 :
- memPartCreate :创建一个内存池,大小为 1MB。
- memPartAlloc :从内存池中分配指定大小的内存块。
- memPartFree :释放已分配的内存块。
参数说明 :
malloc(1024 * 1024):动态分配 1MB 内存作为内存池的基础。memPartCreate:返回内存池句柄,用于后续分配和释放操作。
通过内存池机制,VxWorks 可以有效减少内存碎片,提高内存使用效率。
4.4 微内核在VxWorks中的实际应用案例
4.4.1 系统启动流程分析
VxWorks 的系统启动流程高度模块化,微内核负责初始化基本硬件和任务调度机制,随后加载外围模块。
graph TD
A[系统上电] --> B[Bootloader加载]
B --> C[微内核初始化]
C --> D[初始化任务管理器]
D --> E[初始化中断和内存管理]
E --> F[创建根任务]
F --> G[加载外围模块]
G --> H[网络协议栈]
G --> I[文件系统]
G --> J[设备驱动]
H --> K[系统就绪]
I --> K
J --> K
流程说明 :
- Bootloader加载 :引导程序负责将 VxWorks 映像加载到内存中。
- 微内核初始化 :完成内核基本结构的初始化。
- 任务管理器初始化 :创建初始任务(根任务)。
- 外围模块加载 :按需加载网络、文件系统、驱动等模块。
- 系统就绪 :所有模块加载完成后,系统进入运行状态。
该流程体现了微内核架构的灵活性和可扩展性。
4.4.2 内核裁剪与定制
VxWorks 支持强大的内核裁剪机制,开发者可以根据具体需求移除不必要的功能模块,以实现最小系统运行。
例如,若目标设备仅需任务调度和基本通信功能,可以裁剪掉网络协议栈和文件系统模块。
裁剪步骤 (基于 Workbench 工具):
- 打开 Workbench,进入项目配置界面。
- 选择“Component Selection”选项卡。
- 取消勾选“INCLUDE_NETWORKING”和“INCLUDE_FILESYSTEM”。
- 重新编译生成内核镜像。
裁剪后的系统将显著减少内存占用和启动时间,适用于资源受限的嵌入式设备。
通过本章的深入分析,我们了解了微内核与宏内核在架构设计、安全性、稳定性等方面的区别,并结合 VxWorks 的具体实现,展示了其微内核机制、IPC 通信方式、模块化优势以及在实际系统中的应用。下一章我们将进一步探讨 WindML 事件驱动模型,以及其在 GUI 与系统事件处理中的应用机制。
5. WindML事件驱动模型分析
WindML(Wind Media Library)作为VxWorks平台中的核心事件驱动图形处理框架,广泛应用于嵌入式系统的图形用户界面(GUI)和系统级事件处理中。本章将深入剖析WindML的事件驱动模型,包括其基本原理、框架结构、事件处理机制,以及其在实际应用中的协同调度与响应策略。
5.1 事件驱动模型的基本原理
事件驱动模型是现代嵌入式系统中常见的程序控制机制,它通过响应外部事件(如用户输入、硬件中断、定时器触发等)来驱动程序执行流程。在VxWorks环境下,WindML通过高效的事件驱动架构实现对GUI和系统事件的统一调度与处理。
5.1.1 事件循环与回调机制
事件驱动模型的核心在于 事件循环(Event Loop) 与 回调函数(Callback Function) 。在WindML中,事件循环持续监听事件队列中的事件,一旦检测到事件发生,便调用相应的回调函数进行处理。
void eventLoop(void)
{
EVENT event;
while (TRUE) {
if (eventQueueGet(&eventQueue, &event, WAIT_FOREVER) == OK) {
if (eventHandlerTable[event.type]) {
eventHandlerTable[event.type](&event); // 调用回调函数
}
}
}
}
代码解释:
-eventQueueGet:从事件队列中取出事件,WAIT_FOREVER表示无限等待直到有事件到达。
-eventHandlerTable:事件处理函数表,根据事件类型调用相应的回调函数。
- 该循环持续运行,确保系统能够实时响应各种事件。
事件处理流程图(Mermaid)
graph TD
A[事件发生] --> B{事件队列是否为空?}
B -- 是 --> C[等待事件]
B -- 否 --> D[取出事件]
D --> E[查找事件处理函数]
E --> F[执行回调函数]
F --> G[事件处理完成]
G --> A
5.1.2 事件队列与优先级处理
WindML中的事件队列支持 优先级划分 ,确保高优先级事件(如用户交互、系统错误等)能够优先被处理,从而提升系统的响应性能。
| 优先级等级 | 事件类型 | 示例 |
|---|---|---|
| 高 | 用户输入事件 | 按键、触摸屏点击 |
| 中 | 系统状态变更事件 | 网络连接状态变化 |
| 低 | 后台任务通知 | 日志写入、定时任务执行完成 |
参数说明:
- 高优先级事件可中断当前正在处理的低优先级事件。
- WindML通过eventQueuePrioritySet()函数设置事件队列的优先级调度策略。
5.2 WindML框架结构解析
WindML作为VxWorks中的图形和事件处理中间件,采用模块化设计,具备良好的扩展性和跨平台兼容性。
5.2.1 WindML的组件构成
WindML框架主要由以下几个核心组件构成:
- 事件管理器(Event Manager) :负责事件的捕获、分发与回调处理。
- 图形引擎(Graphics Engine) :提供基本图形绘制接口,如窗口、控件、字体等。
- 输入设备接口(Input Device Interface) :支持多种输入设备(如键盘、触摸屏)的接入与事件生成。
- 窗口系统(Window System) :实现窗口管理、布局控制与图形合成。
- 资源管理器(Resource Manager) :管理图像、字体、颜色等图形资源。
WindML组件结构图(Mermaid)
graph TD
A[WindML 应用] --> B[事件管理器]
A --> C[图形引擎]
A --> D[输入设备接口]
A --> E[窗口系统]
A --> F[资源管理器]
B --> G[VxWorks 内核]
C --> G
D --> G
E --> G
F --> G
5.2.2 事件处理流程与任务调度协同
WindML的事件处理流程与VxWorks的任务调度机制紧密协同,确保在高并发场景下依然保持良好的响应性能。
WindML事件处理流程:
- 事件生成 :由输入设备或系统模块触发事件(如按键按下)。
- 事件注册 :事件管理器将事件封装后放入事件队列。
- 事件调度 :事件循环从队列中取出事件,判断优先级并决定是否立即处理。
- 回调执行 :调用注册的回调函数进行事件处理。
- 任务切换 :若事件处理涉及多任务交互,WindML会通过VxWorks的任务调度机制切换任务上下文。
STATUS eventRegister(EVENT_HANDLER handler, int priority)
{
if (eventQueueCreate(&eventQueue, MAX_EVENTS, priority) != OK) {
return ERROR;
}
eventHandlerTable[priority] = handler;
return OK;
}
逻辑分析:
-eventQueueCreate创建具有优先级的事件队列。
-eventHandlerTable用于存储事件类型对应的回调函数。
- 通过注册机制,实现事件处理的动态绑定与优先级控制。
5.3 WindML在GUI与系统事件处理中的应用
WindML不仅用于图形界面交互,还广泛应用于系统级事件处理,如硬件状态监控、异常处理、用户输入响应等。
5.3.1 图形界面交互处理
在嵌入式设备中,WindML支持创建多窗口、多控件的GUI应用。例如,一个简单的按钮点击事件处理流程如下:
void buttonClickHandler(EVENT *event)
{
printf("Button clicked at %d, %d\n", event->x, event->y);
}
void createButton(void)
{
WND wnd = wndCreate("Click Me", 100, 100, 200, 50);
wndSetCallback(wnd, EVENT_TYPE_MOUSE_CLICK, buttonClickHandler);
wndShow(wnd);
}
逐行解读:
-wndCreate创建一个按钮窗口,位置为(100,100),尺寸为200x50。
-wndSetCallback注册点击事件的回调函数。
-wndShow显示窗口。
GUI控件事件响应流程图(Mermaid)
graph LR
A[用户点击按钮] --> B[生成鼠标点击事件]
B --> C[事件管理器捕获事件]
C --> D[事件队列排队]
D --> E[事件循环取出事件]
E --> F[调用buttonClickHandler]
F --> G[输出点击坐标信息]
5.3.2 设备事件响应机制
WindML不仅限于图形界面事件处理,还支持系统级设备事件的响应。例如,当检测到串口有数据到达时,系统可以触发事件并调用处理函数。
void serialDataHandler(EVENT *event)
{
char buffer[128];
int bytesRead = serialRead(event->fd, buffer, sizeof(buffer));
printf("Received: %s\n", buffer);
}
void registerSerialEvent(int fd)
{
eventRegisterFd(fd, EVENT_TYPE_SERIAL_DATA, serialDataHandler);
}
代码逻辑说明:
-serialDataHandler处理串口数据接收。
-eventRegisterFd将文件描述符与事件处理函数绑定,实现事件驱动的数据处理。
- 这种机制避免了传统的轮询方式,提高了系统效率。
设备事件响应性能对比表
| 处理方式 | 响应延迟(ms) | CPU占用率 | 适用场景 |
|---|---|---|---|
| 事件驱动 | <1 | 低 | 实时性强的嵌入式系统 |
| 轮询方式 | 5~10 | 高 | 简单系统或非关键任务 |
| 中断驱动 | <0.5 | 中 | 关键硬件事件处理 |
分析:
- WindML结合事件驱动与中断机制,既保证了低延迟响应,又降低了CPU资源占用。
- 在VxWorks系统中,WindML与底层中断机制无缝集成,形成高效的事件响应链。
总结与后续章节衔接
通过本章对WindML事件驱动模型的详细分析,我们了解到其在嵌入式系统中的关键作用,尤其是在GUI交互与系统事件处理方面的高效性与灵活性。WindML的设计不仅满足了实时性的要求,也通过模块化结构提供了良好的可扩展性。
在下一章中,我们将进入实际开发阶段,介绍VxWorks嵌入式系统的开发全流程,包括系统需求分析、BSP开发、应用程序集成与系统优化部署等内容,进一步提升读者在真实项目中的开发能力与问题解决能力。
6. VxWorks嵌入式系统开发全流程实战
本章将围绕VxWorks嵌入式系统的实际开发流程展开,涵盖从系统需求分析到部署维护的完整开发周期。通过一个实际项目案例,帮助开发者理解VxWorks在嵌入式系统开发中的具体应用方式,掌握从架构设计到调试优化的全流程技术要点。
6.1 系统需求分析与架构设计
6.1.1 功能需求定义
在开发VxWorks嵌入式系统之前,首先需要明确系统的功能需求。例如,一个工业自动化控制系统可能需要实现以下功能:
- 实时采集多个传感器数据;
- 控制执行机构(如电机、阀门);
- 支持远程通信(如TCP/IP、CAN总线);
- 提供人机界面(GUI)进行状态监控与操作;
- 支持异常处理与日志记录。
需求定义阶段需与硬件工程师、软件工程师及系统集成人员共同完成,形成明确的《系统需求规格说明书》。
6.1.2 系统模块划分与接口设计
根据功能需求,系统可划分为以下模块:
| 模块名称 | 功能描述 | 与其他模块接口 |
|---|---|---|
| 数据采集模块 | 读取传感器数据 | 与主控模块通信 |
| 控制执行模块 | 控制执行器动作 | 接收主控模块指令 |
| 通信模块 | 实现网络通信 | 提供TCP/IP、CAN接口 |
| GUI模块 | 显示状态与操作界面 | 调用数据采集模块数据 |
| 主控模块 | 协调各模块运行 | 调度任务、协调通信 |
模块之间的接口应通过清晰的函数定义或消息传递机制实现,确保模块之间低耦合、高内聚。
6.2 板级支持包(BSP)开发与调试
6.2.1 BSP的作用与结构
BSP(Board Support Package)是VxWorks系统与硬件平台之间的接口层,负责初始化硬件、提供底层驱动支持。BSP通常包括以下内容:
- 启动代码(Bootloader);
- CPU初始化;
- 内存配置;
- 中断控制器配置;
- 串口、网口、定时器等外设驱动。
BSP的结构如下:
bsp/
├── config.h # 系统配置宏定义
├── sysLib.c # 系统初始化函数
├── intCtlr.c # 中断控制器驱动
├── timerDrv.c # 定时器驱动
├── serialDrv.c # 串口驱动
└── Makefile # 编译脚本
6.2.2 驱动开发与硬件适配
以串口驱动为例,开发者需要实现串口初始化、发送与接收函数。以下是一个简化的串口初始化函数示例:
void serialInit(int channel) {
volatile UINT8 *uartReg = (UINT8 *)UART_BASE_ADDR[channel];
// 设置波特率
uartReg[BAUD_REG] = BAUD_115200;
// 设置数据位、停止位、校验位
uartReg[LINE_CTRL_REG] = DATA_8BIT | STOP_1BIT | PARITY_NONE;
// 使能接收中断
uartReg[INT_ENABLE_REG] |= RX_READY_INT_ENABLE;
// 注册中断服务程序
intConnect(INUM_TO_IVEC(UART_INT_VEC[channel]), uartIsr, channel);
intEnable(UART_INT_LVL[channel]);
}
参数说明:
channel:串口通道编号;UART_BASE_ADDR:串口寄存器基地址;intConnect:注册中断服务函数;intEnable:使能中断。
开发过程中,需配合示波器、逻辑分析仪等工具进行调试,确保驱动功能稳定可靠。
6.3 应用程序开发与集成
6.3.1 多任务应用程序设计
VxWorks支持多任务并发执行。开发者可以使用 taskSpawn 函数创建任务:
int taskId = taskSpawn("tMyTask", 100, VX_FP_TASK, 2000, (FUNCPTR)myTaskEntry, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0);
参数说明:
"tMyTask":任务名称;100:任务优先级(数值越小优先级越高);VX_FP_TASK:任务属性,表示支持浮点运算;2000:任务堆栈大小;myTaskEntry:任务入口函数;- 后续为传递给任务的参数。
任务入口函数示例如下:
void myTaskEntry(int arg1, int arg2) {
while (1) {
// 执行任务逻辑
printf("Task running...\n");
taskDelay(sysClkRateGet() * 1); // 延时1秒
}
}
6.3.2 任务调度与同步机制应用
VxWorks提供了多种任务同步机制,如信号量、消息队列、事件组等。以下是一个使用信号量进行任务同步的示例:
SEM_ID semId = semBCreate(SEM_Q_PRIORITY, SEM_EMPTY); // 创建二值信号量
// 任务A等待信号量
void taskA() {
while (1) {
semTake(semId, WAIT_FOREVER);
printf("Task A received signal.\n");
}
}
// 任务B释放信号量
void taskB() {
while (1) {
taskDelay(sysClkRateGet() * 2);
semGive(semId); // 发送信号给任务A
}
}
上述代码中,任务A等待信号量,任务B每隔2秒发送一次信号,实现任务间的同步控制。
6.4 系统测试与优化部署
6.4.1 实时性测试方法
为了评估系统的实时性能,可以使用VxWorks提供的 tickLib 和 sysClkRateGet 进行时间戳记录,测试任务响应延迟:
UINT32 start, end;
start = tickGet();
// 执行测试代码
end = tickGet();
printf("Time cost: %d ticks\n", end - start);
此外,还可以使用 timex 工具进行更复杂的性能分析,评估中断响应时间、任务切换延迟等指标。
6.4.2 性能调优与问题定位
常见性能问题包括:
- 任务调度不均;
- 内存泄漏;
- 中断处理延迟;
- 死锁或资源竞争。
调优方法包括:
- 使用
memShow检查内存使用情况; - 使用
taskShow查看任务状态; - 使用
wdCreate创建看门狗定时器监控任务状态; - 分析调用栈和堆栈使用情况。
6.4.3 系统部署与维护策略
系统部署后,需建立完善的维护机制,包括:
- 远程升级机制(OTA);
- 日志记录与分析;
- 故障自恢复机制;
- 版本管理与配置管理。
例如,可通过VxWorks的 bootApp 机制实现应用程序的远程更新:
bootStringToStruct("0x100000 myApp.out", &bootParams); // 解析启动参数
bootLoad(); // 加载应用程序
部署完成后,建议定期进行系统健康检查和性能评估,确保系统长期稳定运行。
简介:嵌入式操作系统是计算机科学的重要分支,广泛应用于工业控制、通信、医疗和航空航天等领域。VxWorks作为一款主流实时操作系统(RTOS),以其硬实时性、微内核架构和强大的多任务调度能力著称。本文围绕VxWorks的核心特性展开,涵盖事件驱动机制、设备驱动开发、网络支持、GUI设计、BSP移植等内容,并结合多篇技术论文深入分析其在实际项目中的应用。通过本论文学习,读者可全面掌握VxWorks系统设计原理与开发实践,为嵌入式实时系统开发打下坚实基础。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐

 28
28 0
0- 0



 已为社区贡献63条内容
已为社区贡献63条内容

所有评论(0)