
拒绝学生化编程——有限状态机
·
企业级嵌入式开发领域,有限状态机(Finite State Machine,简称FSM)是构建高可靠性、高可维护性软件体系的核心基石。不同于简单的线性逻辑编程,工业场景下的设备与系统,往往需要应对复杂的状态切换、异常处理、时序控制等核心需求——从工业机器人的动作流程管控,到智能传感器的工作模式切换,再到工业网关的通信状态管理,几乎所有核心业务逻辑的落地,都离不开一套健壮、可扩展的状态机设计。
缺乏规范状态机支撑的工业代码,往往会陷入“面条式逻辑”的困境:大量嵌套的条件分支、零散的状态判断、无序的流程跳转,不仅会导致代码可读性差、维护成本飙升,更会在工业现场复杂的工况下,引发不可预测的逻辑漏洞,甚至造成设备故障、生产中断等严重后果。而一个设计精良的状态机,能够将系统的所有行为抽象为“状态”与“状态流转规则”,通过明确的“进入(Entry)- 执行(Action)- 退出(Exit)”三阶段生命周期管理,让每个状态的职责边界清晰、状态间的切换逻辑可追溯,从根本上保障代码的健壮性与可测试性,适配工业级嵌入式开发的严苛要求。
因此,本期内容将从实战角度出发,详细讲解企业级嵌入式开发中状态机的核心设计范式,最后结合完整实例拆解,帮助大家掌握在实际项目中嵌入状态机的思路与方法,为后续开发提供可直接参考的模板。
一、状态机设计的核心前提:明确系统状态与流转逻辑
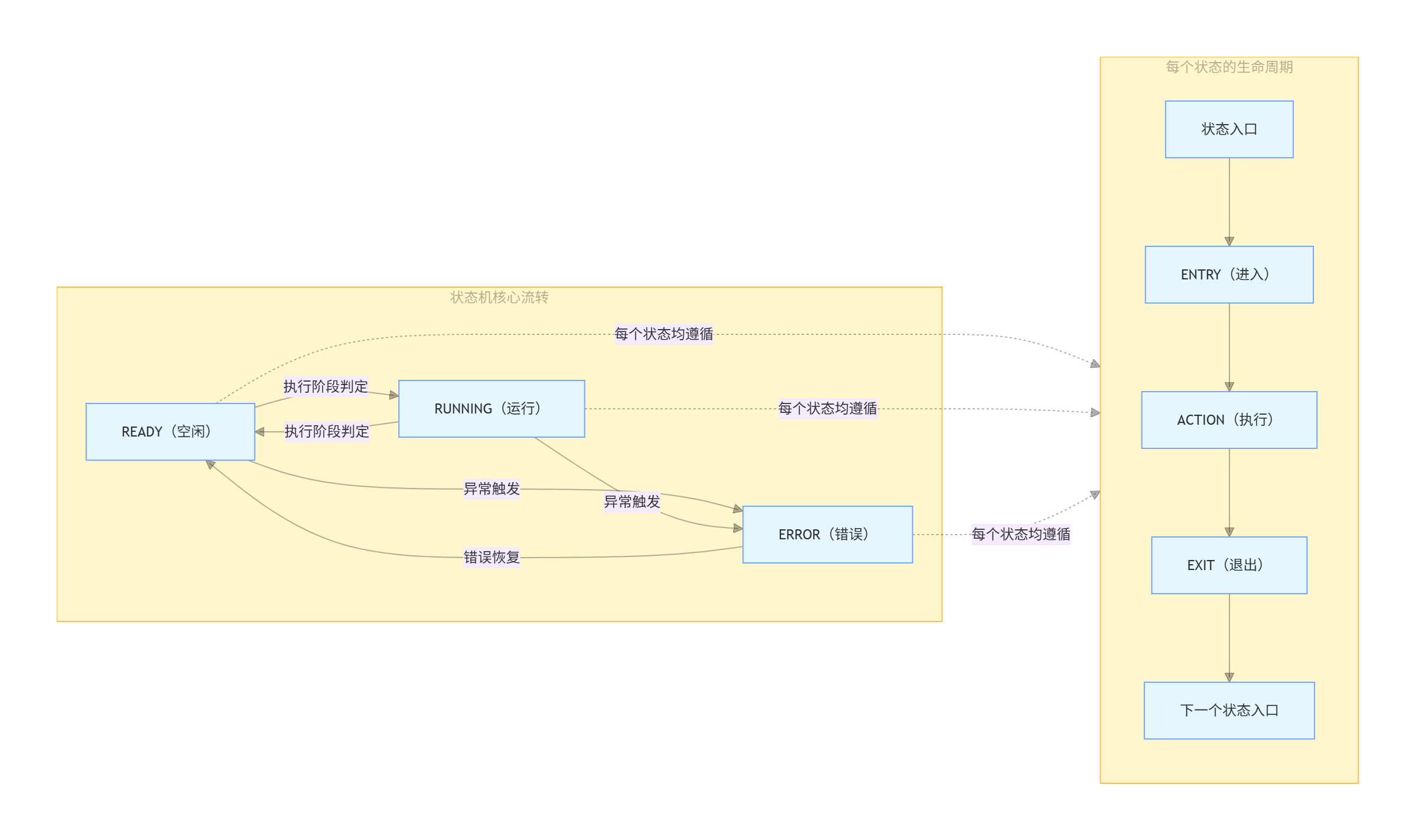
在实际嵌入式开发中,要设计出贴合项目需求的状态机,首要任务是理清三个核心问题:项目需要多少个核心状态、状态之间的切换流程是什么、每种状态的生命周期如何管理。而流程图,正是梳理这些问题、落地状态机设计的关键工具——它能将抽象的状态与流转逻辑可视化,避免后续代码开发陷入逻辑混乱。
为了让大家快速理解,我们先绘制一个简化的嵌入式设备状态流程图(如上图所示),该流程图仅定义了三个最基础且通用的核心状态:空闲(Ready)、运行(Running)、错误(ERROR),同时明确了每种核心状态对应的“进入-执行-退出”子状态(即生命周期阶段)。
讲到这里,很多新手可能会有一个误区:认为“空闲状态”就意味着设备不执行任何操作,因此只需处理“进入空闲”和“退出空闲”两个事件即可。实则不然——设备在空闲态并非完全“闲置”,只是其执行的操作不影响核心业务功能,更多是用于“监听触发条件”,为状态切换做准备。
我们举一个贴近生活的工业设备类比:一个具备加热功能的工业恒温水杯,其核心业务是“加热至指定温度”。我们可以将其抽象为两个核心状态:空闲态(未执行加热动作)、运行态(加热中)。那么这个水杯在空闲态会做什么?答案是“持续检测触发条件”——比如监听水杯上的启动按键,判断是否有用户按下;同时可能检测当前水温,确认是否需要再次启动加热。这些“不影响核心加热功能,但保障状态正常切换”的操作,就是空闲态的“执行事件”。
这里需要强调一个关键规则:状态的切换并非随机发生,仅当“执行阶段(Action)”判定满足切换条件时,才会触发当前状态的“退出阶段(Exit)”,进而进入下一个状态的“进入阶段(Entry)”,确保状态流转的有序性。
二、状态机的核心结构体设计:用代码封装生命周期
明确状态与流转逻辑后,我们需要用代码将其封装,让状态机的生命周期可管理、可扩展。在嵌入式C语言开发中,通常通过“子状态机结构体”(封装单个状态的生命周期)和“全局状态机结构体”(管理所有核心状态)来实现,以下是标准化的结构体设计方案。
2.1 子状态机结构体:封装单个状态的生命周期
子状态机的核心作用,是绑定单个核心状态(如Ready)与其对应的“进入-执行-退出”三阶段回调函数,明确每个阶段的执行逻辑。其中,进入(Entry)和退出(Exit)阶段仅执行操作、无返回值;执行(Action)阶段需判断是否切换状态,因此有返回值(目标状态)。
// 无返回值的回调函数(用于Entry/Exit阶段,仅执行操作)
typedef void(*EVENT)(void);
// 有返回值的回调函数(用于Action阶段,返回目标状态,决定是否切换状态)
typedef devFSMState_t(*ACTION)(void);
// 子状态机结构体:封装单个核心状态的生命周期
typedef struct devFSMStateStructType
{
unsigned char curState; // 当前绑定的核心状态(READY/RUNNING/ERROR)
unsigned char subState; // 当前执行阶段(ENTRY/ACTION/EXIT)
EVENT entry; // 进入阶段回调函数(状态激活时执行)
ACTION action; // 执行阶段回调函数(状态持续运行时执行)
EVENT exit; // 退出阶段回调函数(状态切换前执行)
} SubFSMState_t;2.2 全局状态机结构体:管理所有核心状态
全局状态机用于统一管理系统中所有的核心状态,通过子状态机数组,将每个核心状态与对应的子状态机关联,同时记录设备当前所处的核心状态,方便后续调度。
#define DEV_FSM_STATE_CAP 3 // 状态容量(对应3个核心状态:READY/RUNNING/ERROR)
// 全局状态机结构体:管理所有核心状态及其子状态机
typedef struct devFSMStructType
{
unsigned char state; // 设备当前所处的核心状态
SubFSMState_t subFSM[DEV_FSM_STATE_CAP]; // 子状态机数组(一一对应核心状态)
} DevFSM_t;三、状态机核心逻辑实现:初始化、注册与调度
结构体设计完成后,接下来实现状态机的三大核心操作:初始化(启动状态机)、回调函数注册(绑定状态与执行逻辑)、执行调度(周期性运行状态机)。这三部分逻辑是状态机正常工作的基础,需严格遵循“初始化→注册→调度”的执行顺序。
3.1 初始化:重置状态,绑定核心状态与子状态机
初始化的核心目的,是将所有子状态机重置为初始状态(进入阶段ENTRY),绑定每个子状态机与对应的核心状态,并设置设备的初始核心状态(通常为空闲态READY),为后续状态流转做好准备。
// 全局状态机实例(供整个系统调用)
DevFSM_t DevFSM;
void DevFSM_Init(void)
{
// 1. 初始化所有子状态机:阶段重置为ENTRY,回调函数置空(避免野指针)
for (int i = 0; i < DEV_FSM_STATE_CAP; i++)
{
DevFSM.subFSM[i].subState = DEV_FSM_STAGE_ENTRY;
DevFSM.subFSM[i].entry = NULL;
DevFSM.subFSM[i].action = NULL;
DevFSM.subFSM[i].exit = NULL;
}
// 2. 绑定子状态机与核心状态(一一对应,确保调度时能精准定位)
DevFSM.subFSM[DEV_FSM_INDEX_READY].curState = DEV_STATE_READY;
DevFSM.subFSM[DEV_FSM_INDEX_RUNNING].curState = DEV_STATE_RUNNING;
DevFSM.subFSM[DEV_FSM_INDEX_ERROR].curState = DEV_STATE_ERROR;
// 3. 设置设备初始状态为READY(空闲态,符合嵌入式设备启动逻辑)
DevFSM.state = DEV_STATE_READY;
}3.2 回调函数注册:灵活配置每个状态的执行逻辑
注册函数的核心作用,是将我们自定义的“进入-执行-退出”回调函数,绑定到对应的子状态机上。这样设计的优势的是“解耦”——后续修改某个状态的执行逻辑时,只需修改对应的回调函数,无需改动状态机核心调度代码,大幅提升可维护性。
// 状态机回调函数注册:为指定核心状态绑定Entry/Exit/Action回调
void DevFSM_SetFSMEvent(unsigned char state, EVENT entry, EVENT exit, ACTION action)
{
switch (state)
{
case DEV_STATE_READY: // 绑定空闲态回调函数
DevFSM.subFSM[DEV_FSM_INDEX_READY].entry = entry;
DevFSM.subFSM[DEV_FSM_INDEX_READY].action = action;
DevFSM.subFSM[DEV_FSM_INDEX_READY].exit = exit;
break;
case DEV_STATE_RUNNING: // 绑定运行态回调函数
DevFSM.subFSM[DEV_FSM_INDEX_RUNNING].entry = entry;
DevFSM.subFSM[DEV_FSM_INDEX_RUNNING].action = action;
DevFSM.subFSM[DEV_FSM_INDEX_RUNNING].exit = exit;
break;
case DEV_STATE_ERROR: // 绑定错误态回调函数
DevFSM.subFSM[DEV_FSM_INDEX_ERROR].entry = entry;
DevFSM.subFSM[DEV_FSM_INDEX_ERROR].action = action;
DevFSM.subFSM[DEV_FSM_INDEX_ERROR].exit = exit;
break;
default: // 无效状态,不做操作(避免异常)
break;
}
}3.3 执行调度:状态机的核心“大脑”
状态机执行调度函数,是整个状态机的核心,需在嵌入式系统的主循环、定时器中断或单独线程中周期性调用(调用周期根据项目需求设定,如500ms/次)。其核心逻辑分为两步:定位当前子状态机、按生命周期阶段执行回调函数。
这里有一个关键设计:进入阶段(ENTRY)执行完成后,不添加break语句,直接无缝进入执行阶段(ACTION),确保状态生命周期的连续性;只有当执行阶段判定需要切换状态时,才会进入退出阶段(EXIT),完成当前状态的清理后,重置为进入阶段,等待下一次状态激活。
还有两点我想说明下,首先我在执行阶段会判断执行事件的返回值,通过返回值来确认是否需要进行状态切换,第二点就是可以看到事件并不是必须要定义的,例如我并不想定义空闲的进入事件,那么我完全可以定义空闲的进入事件为NULL
// 状态机核心调度函数:周期性执行,实现状态流转
void DevFSM_Execute(void)
{
devFSMState_t state; // 存储Action阶段返回的目标状态
int index; // 用于定位当前状态对应的子状态机索引
// 步骤1:定位当前核心状态对应的子状态机(遍历子状态机数组)
for (index = 0; index < DEV_FSM_STATE_CAP; index++)
{
if (DevFSM.subFSM[index].curState != DevFSM.state)
{
continue; // 跳过不匹配的子状态机
}
break; // 找到匹配的子状态机,退出遍历
}
// 步骤2:按“ENTRY-ACTION-EXIT”阶段执行回调函数
switch (DevFSM.subFSM[index].subState)
{
case DEV_FSM_STAGE_ENTRY:
// 执行进入阶段回调(如初始化状态相关资源)
if (DevFSM.subFSM[index].entry != NULL)
{
DevFSM.subFSM[index].entry();
}
// 进入阶段完成后,无缝切换到执行阶段(无break)
DevFSM.subFSM[index].subState = DEV_FSM_STAGE_ACTION;
case DEV_FSM_STAGE_ACTION:
// 执行核心业务逻辑(如监听触发条件、执行任务)
if (DevFSM.subFSM[index].action != NULL)
{
state = DevFSM.subFSM[index].action();
// 若返回的目标状态与当前状态不同,触发状态切换(进入EXIT阶段)
if (state != DevFSM.subFSM[index].curState)
{
DevFSM.state = state; // 更新全局核心状态
DevFSM.subFSM[index].subState = DEV_FSM_STAGE_EXIT;
break; // 退出当前switch,下次调度执行EXIT阶段
}
}
break; // 若无需切换状态,保持在ACTION阶段,下次调度继续执行
case DEV_FSM_STAGE_EXIT:
// 执行退出阶段回调(如清理状态相关资源)
if (DevFSM.subFSM[index].exit != NULL)
{
DevFSM.subFSM[index].exit();
}
// 退出阶段完成后,重置为ENTRY阶段,等待下一次状态激活
DevFSM.subFSM[index].subState = DEV_FSM_STAGE_ENTRY;
break;
default:
break;
}
}四、实战实例:状态机在嵌入式设备中的完整应用
结合上面的结构体设计和核心逻辑,我们以“简化版工业恒温水杯”为例,实现一个完整的状态机应用实例。实例中,我们将完善Ready态和Running态的回调函数,模拟设备的状态流转过程,同时补充Error态的基础实现,让整个实例更贴合实际开发场景。
4.1 各状态回调函数实现
回调函数是状态机的“业务逻辑载体”,我们根据每个状态的职责,实现对应的进入、执行、退出逻辑(用printf打印日志,模拟业务执行;用Sleep模拟耗时操作,贴合嵌入式设备实际工况)。
// 提前声明状态枚举(实际开发中建议放在头文件中)
typedef enum {
DEV_STATE_READY = 0, // 空闲态
DEV_STATE_RUNNING = 1, // 运行态(加热中)
DEV_STATE_ERROR = 2 // 错误态(如水温异常)
} devFSMState_t;
// 提前声明阶段枚举
typedef enum {
DEV_FSM_STAGE_ENTRY = 0, // 进入阶段
DEV_FSM_STAGE_ACTION = 1, // 执行阶段
DEV_FSM_STAGE_EXIT = 2 // 退出阶段
} devFSMStage_t;
// 提前声明子状态机索引(与核心状态一一对应)
#define DEV_FSM_INDEX_READY 0
#define DEV_FSM_INDEX_RUNNING 1
#define DEV_FSM_INDEX_ERROR 2
// (结构体定义、全局状态机实例、初始化/注册/调度函数,此处省略,同前文)
// -------------------------- Ready状态回调函数(空闲态)--------------------------
// 进入Ready态:模拟空闲态初始化(如重置水温检测标志)
static void DevFSM_EntryReady(void)
{
printf("[ READY ]: 进入空闲态,初始化水温检测模块...\r\n");
Sleep(500); // 模拟初始化耗时(嵌入式环境可替换为delay_ms(500))
}
// 退出Ready态:模拟空闲态资源清理(如停止水温预检测)
static void DevFSM_ExitReady(void)
{
printf("[ READY ]: 退出空闲态,停止水温预检测...\r\n");
Sleep(500); // 模拟清理耗时
}
// 执行Ready态:模拟监听启动按键(核心逻辑),满足条件则切换到Running态
static devFSMState_t DevFSM_ActionReady(void)
{
devFSMState_t targetState = DEV_STATE_READY; // 默认保持空闲态
static int keyPressCount = 0; // 模拟按键按下次数(仅用于演示)
// 模拟业务逻辑:每执行3次,模拟按键被按下(触发状态切换)
keyPressCount++;
printf("[ READY ]: 执行空闲态逻辑,监听启动按键(第%d次检测)...\r\n", keyPressCount);
Sleep(3000); // 模拟检测周期(每3秒检测一次按键)
if (keyPressCount >= 3)
{
printf("[ READY ]: 检测到启动按键按下,准备切换到加热态(Running)...\r\n");
targetState = DEV_STATE_RUNNING; // 切换到运行态
keyPressCount = 0; // 重置按键计数
}
return targetState; // 返回目标状态
}
// -------------------------- Running状态回调函数(加热中)--------------------------
// 进入Running态:模拟加热模块初始化(如启动加热管)
static void DevFSM_EntryRunning(void)
{
printf("[ RUNNING ]: 进入加热态,启动加热管,开始加热...\r\n");
Sleep(1000); // 模拟加热管启动耗时
}
// 退出Running态:模拟加热模块关闭(如关闭加热管)
static void DevFSM_ExitRunning(void)
{
printf("[ RUNNING ]: 退出加热态,关闭加热管,停止加热...\r\n");
Sleep(1000); // 模拟加热管关闭耗时
}
// 执行Running态:模拟加热过程,检测水温,达标则切换回Ready态
static devFSMState_t DevFSM_ActionRunning(void)
{
devFSMState_t targetState = DEV_STATE_RUNNING; // 默认保持加热态
static int temperature = 25; // 模拟初始水温(25℃)
// 模拟加热逻辑:每次执行水温升高10℃,达到85℃则停止加热(切换回空闲态)
temperature += 10;
printf("[ RUNNING ]: 执行加热逻辑,当前水温:%d℃(目标85℃)...\r\n", temperature);
Sleep(3000); // 模拟加热周期(每3秒检测一次水温)
if (temperature >= 85)
{
printf("[ RUNNING ]: 水温达到目标(85℃),准备切换回空闲态(Ready)...\r\n");
targetState = DEV_STATE_READY; // 切换回空闲态
temperature = 25; // 重置水温(模拟下次加热)
}
// 模拟错误处理:若水温异常过高(超过100℃),切换到Error态(此处简化处理)
if (temperature > 100)
{
printf("[ RUNNING ]: 警告!水温异常过高(%d℃),切换到错误态(Error)...\r\n", temperature);
targetState = DEV_STATE_ERROR;
}
return targetState;
}
// -------------------------- Error状态回调函数(错误态)--------------------------
// 进入Error态:模拟错误提示(如点亮报警灯)
static void DevFSM_EntryError(void)
{
printf("[ ERROR ]: 进入错误态,点亮报警灯,提示水温异常!\r\n");
Sleep(500);
}
// 退出Error态:模拟错误解除(如熄灭报警灯)
static void DevFSM_ExitError(void)
{
printf("[ ERROR ]: 退出错误态,熄灭报警灯,错误已解除...\r\n");
Sleep(500);
}
// 执行Error态:模拟错误处理(如持续报警,等待人工干预)
static devFSMState_t DevFSM_ActionError(void)
{
printf("[ ERROR ]: 执行错误态逻辑,持续报警,等待人工干预...\r\n");
Sleep(5000); // 模拟报警周期(每5秒提示一次错误)
// 简化处理:此处默认等待人工干预后,切换回空闲态(实际开发可根据需求修改)
static int errorCount = 0;
errorCount++;
if (errorCount >= 2)
{
printf("[ ERROR ]: 人工干预解除错误,准备切换回空闲态(Ready)...\r\n");
errorCount = 0;
return DEV_STATE_READY;
}
return DEV_STATE_ERROR; // 默认保持错误态
}4.2 系统启动与主循环:状态机调度入口
最后,实现状态机的测试函数和主函数,完成“初始化→注册→调度”的完整流程,模拟嵌入式系统的启动与运行过程。
// 状态机测试函数:初始化、注册回调、启动调度
void DevFSM_Test()
{
// 1. 初始化状态机(重置状态,绑定核心状态与子状态机)
DevFSM_Init();
printf("状态机初始化完成,初始状态:空闲态(Ready)\r\n");
Sleep(1000);
// 2. 注册所有状态的回调函数(绑定状态与业务逻辑)
DevFSM_SetFSMEvent(DEV_STATE_READY, DevFSM_EntryReady, DevFSM_ExitReady, DevFSM_ActionReady);
DevFSM_SetFSMEvent(DEV_STATE_RUNNING, DevFSM_EntryRunning, DevFSM_ExitRunning, DevFSM_ActionRunning);
DevFSM_SetFSMEvent(DEV_STATE_ERROR, DevFSM_EntryError, DevFSM_ExitError, DevFSM_ActionError);
printf("所有状态回调函数注册完成,启动状态机调度...\r\n");
Sleep(1000);
// 3. 主循环:周期性执行状态机调度(模拟嵌入式系统主循环)
while (1)
{
Sleep(500); // 调度周期(每500ms调度一次状态机)
DevFSM_Execute(); // 执行状态机调度
}
}
// 程序入口(嵌入式系统可替换为main函数或启动任务)
int main()
{
DevFSM_Test(); // 启动状态机测试
return 0;
}五、实战开发注意事项
通过上述实例,我们可以发现:企业级嵌入式开发中,状态机的核心价值在于“解耦”和“规范”——将复杂的业务逻辑拆分为一个个独立的状态,每个状态的职责单一,状态间的切换逻辑可追溯。结合实战经验,补充几个关键注意事项,帮助大家规避常见坑:
- 状态划分要“精准适度”:核心状态不宜过多(避免状态机复杂度过高),也不宜过少(避免状态职责模糊);优先划分“稳定的核心状态”,再考虑细分辅助状态。
- 回调函数要“职责单一”:Entry阶段仅做“状态激活相关的初始化”,Exit阶段仅做“状态退出相关的清理”,Action阶段仅做“核心业务逻辑与状态判断”,避免一个回调函数处理过多逻辑。
- 异常处理要“全面”:必须为Error态设计完整的回调逻辑,同时在每个状态的Action阶段,增加异常检测(如资源异常、信号异常),确保系统能从异常状态中恢复,或进入安全状态。
- 调度周期要“合理”:根据业务需求设定调度周期,周期过短会占用过多CPU资源,周期过长会导致状态切换不及时,建议结合设备工况(如检测频率、任务耗时)动态调整。
总结
企业级嵌入式开发中,状态机并非“可选功能”,而是保障软件健壮性、可维护性的“必备工具”。本文从状态机的核心价值出发,梳理了“明确状态逻辑→设计结构体→实现核心调度→落地实战实例”的完整设计流程,核心是通过“状态封装”和“生命周期管理”,解决工业场景下复杂流程的管控问题。
实际开发中,大家无需拘泥于本文的简化实例,可根据项目需求(如多状态、嵌套状态机、异步事件触发)灵活扩展——比如增加状态流转的条件判断、完善异常处理逻辑、引入状态机框架(如QM)提升开发效率。但无论如何扩展,“状态清晰、职责单一、流转可控”这三个核心原则,始终是状态机设计的关键,也是避开“面条式逻辑”、构建高可靠嵌入式软件的核心前提。
本期最后,如果大家在最后有不明白的地方欢迎加入Q群:1082401078 一起交流分享,更多资料也可以进群获取。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 21
21 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)