
凌晨3点被电话叫醒:为什么你的FreeRTOS系统总是‘莫名其妙‘进入ERROR状态?
你的FreeRTOS项目是否也有这些症状:ERROR状态有5个入口、状态变量被10个地方修改、新人永远问"这个状态是谁改的"?根本原因是:系统没有一条"主因果链"。本文提供一套经过实战验证的系统架构方法论,核心理念源自Redux状态管理思想:将系统拆解为Event(事实层)、State(阶段层)、Reducer(唯一决策层)、Action(执行层)四层模型,建立"事件→决策→状态→行为"的单向因果
文章目录
系统主因果链:如何画出一条可解释的系统行为路径
引言:那个让你冷汗直流的现场
真实场景重现
生产环境,凌晨 3 点。现场设备异常报警,你远程连上调试。
日志显示:
TaskCommunication在第 1342 行打印了超时TIM6_IRQHandler里设置了error_flag = 1TaskMain的while(1)循环检测到这个 flag- 但
TaskSafety同时也在检测自己的超时逻辑
现场经理在电话那头问了一个致命问题:
“这个设备为什么会进入 ERROR 状态?”
你开始翻代码:
if在task_a.c,else在task_b.c- 中断里改了一个全局变量
- 定时器回调里又发了一个 Queue 消息
- 某个地方还用了
xTaskNotify
半小时后,你只能说出那句所有嵌入式工程师都说过的话:
“逻辑有点复杂,我捋一下。”
这句话本身,就是警报
“捋一下” 三个字,暴露了一个残酷事实:
你的系统,没有一条可以被完整解释的行为路径。
更致命的是,这种系统在开发期看起来一切正常,直到:
- 需求复杂度翻倍
- 团队成员增加
- 维护周期超过 6 个月
然后它会变成无人敢动的"屎山代码"。
一、什么是"系统主因果链"
1.1 主因果链 ≠ 代码调用关系
大多数工程师听到"因果分析",第一反应是:
- 谁调用了谁?
- 哪个函数先执行?
- 哪里是入口?
这是完全错误的。
在 RTOS 环境下,调用关系早就被调度器打碎了:
// 调用关系在这里已经失效
void TaskA(void *arg) {
while(1) {
xQueueReceive(q, &msg, portMAX_DELAY); // 阻塞点
process(msg); // 什么时候执行?不知道
}
}
void TIM6_IRQHandler(void) {
BaseType_t woken;
xQueueSendFromISR(q, &msg, &woken); // 什么时候触发?不知道
portYIELD_FROM_ISR(woken);
}
真正有意义的,是下面这条链:
外界刺激 → 系统感知 → 内部决策 → 系统行为 → 系统状态变化
这条链,才是系统"活着"的真实方式。
我将其定义为:
System Primary Causal Chain(系统主因果链)

1.2 健康系统的最低标准
不是所有行为都需要 100% 可解释。
但一个健康的系统,必须至少有一条显式的主因果链:
✅ 你能画出来(一张图)
✅ 你能用人话讲清楚(一句话说明)
✅ 你能对应到代码结构(精确到文件和函数)
如果三条都不满足,你的系统已经是不可维护状态。
二、没有主因果链的系统长什么样
2.1 典型错误代码结构
这是一个真实存在于 90% STM32 + FreeRTOS 项目的架构模式:
// 错误示例:分散的决策点
// ============ 文件1: stm32xxxxit.c ============
void EXTI0_IRQHandler(void) {
if(GPIO_ReadPin(...) == GPIO_PIN_RESET) {
button_pressed = 1; // 决策点1:直接改全局变量
}
EXTI_ClearITPendingBit(EXTI_IT0);
}
// ============ 文件2: main_task.c ============
void main_task(void *arg) {
while(1) {
vTaskDelay(pdMS_TO_TICKS(100));
if(button_pressed) { // 决策点2:轮询+判断
button_pressed = 0;
system_state = STATE_WORKING; // 决策点3:改状态
}
if(communication_timeout()) { // 决策点4:顺便检测
system_state = STATE_ERROR; // 决策点5:顺便改状态
}
// ...更多if
}
}
// ============ 文件3: timer_callback.c ============
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if(htim == &htim6) {
if(some_condition) { // 决策点6:定时器里做判断
system_state = STATE_IDLE; // 决策点7:又改状态
}
}
}
诊断结果:
- 状态
system_state被至少 5 个地方修改 - 没有统一的决策入口
- 每个模块都在"顺便判断"和"顺手改状态"
2.2 三个明显的症状
如果你看到下面任何一个,基本可以判定没有主因果链:
症状 1:系统进入某状态,找不到唯一入口
// system_state == ERROR 会被以下任一情况触发:
// 1. 通信超时 (在 main_task)
// 2. 看门狗复位 (在 ISR)
// 3. 人为测试模式 (在 CLI 命令)
// 4. 传感器故障 (在另一个 Task)
// 问:现在 ERROR 是怎么来的?
// 答:需要加日志去"猜"
症状 2:ERROR 状态由多个地方"顺便"触发
// 到处都是这种代码:
if(error_detected) {
current_state = ERROR; // 顺手就改了
}
// 这种代码遍布整个项目
症状 3:新人永远问:这个状态是谁改的?
- Code Review 时没人能说清楚
- Git Blame 显示是 3 年前的某人写的
- 注释只有一行:“进入错误状态”

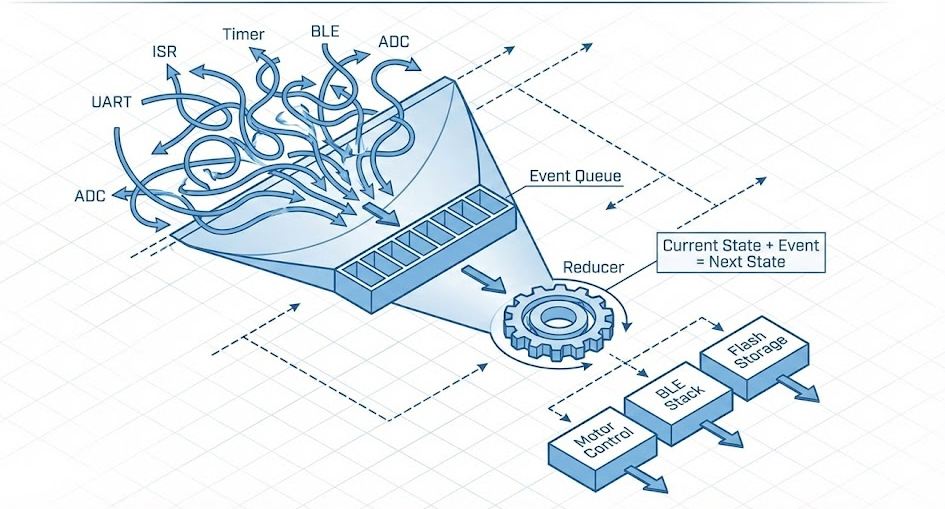
三、主因果链的物理模型:漏斗模型
3.1 漏斗模型的四层结构
想象一个物理漏斗:
┌─────────────────────────────────────┐
│ Layer 1: 外部世界(无限混乱) │
│ ┌────┐ ┌────┐ ┌────┐ ┌────┐ ┌────┐ │
│ │ISR │ │Timer│ │UART│ │BLE │ │ADC ││
│ └────┘ └────┘ └────┘ └────┘ └────┘ │
└─────────────────────────────────────┘
↓
┌─────────────────────────────────────┐
│ Layer 2: 事件收集层(过滤噪声) │
│ ┌───────────────────────────┐ │
│ │ System Event Queue │ │
│ │ - EVT_BUTTON_PRESSED │ │
│ │ - EVT_COMM_TIMEOUT │ │
│ │ - EVT_TEMP_OVER_LIMIT │ │
│ └───────────────────────────┘ │
└─────────────────────────────────────┘
↓
┌─────────────────────────────────────┐
│ Layer 3: 唯一决策层(主因果链核心) │
│ ┌──────────────────┐ │
│ │ SYSTEM REDUCER │ │
│ │ - 当前 State │ │
│ │ - 收到 Event │ │
│ │ → 决策 Next State│ │
│ └──────────────────┘ │
└─────────────────────────────────────┘
↓
┌─────────────────────────────────────┐
│ Layer 4: 行为执行层(被调度干活) │
│ ┌─────┐ ┌─────┐ ┌─────┐ │
│ │Motor│ │BLE │ │Flash│ │
│ └─────┘ └─────┘ └─────┘ │
└─────────────────────────────────────┘
3.2 事件是"事实"不是"判断"
这是理解主因果链的第一个认知跃迁。
错误做法:事件带判断
void UART_IRQHandler(void) {
if(rx_buffer[0] == 'START' && length > 10) { // 在中断里做判断
system_state = WORKING; // 直接改状态
}
}
正确做法:事件只记录事实
void UART_IRQHandler(void) {
system_event_t evt = {
.type = EVT_UART_DATA_RECEIVED, // 只说"收到数据了"
.data = rx_buffer[0]
};
xQueueSendFromISR(event_queue, &evt, NULL); // 丢给决策层
}
// 决策在 Reducer 里做
void system_reducer(system_ctx_t *ctx, const system_event_t *evt) {
switch(ctx->state) {
case SYS_IDLE:
if(evt->type == EVT_UART_DATA_RECEIVED
&& evt->data == 'START'
&& length > 10) { // 判断在这里集中做
ctx->state = SYS_WORKING;
action_start_motor();
}
break;
}
}
核心原则:
- ISR/Callback:只记录"发生了什么"
- Reducer:决定"该做什么"
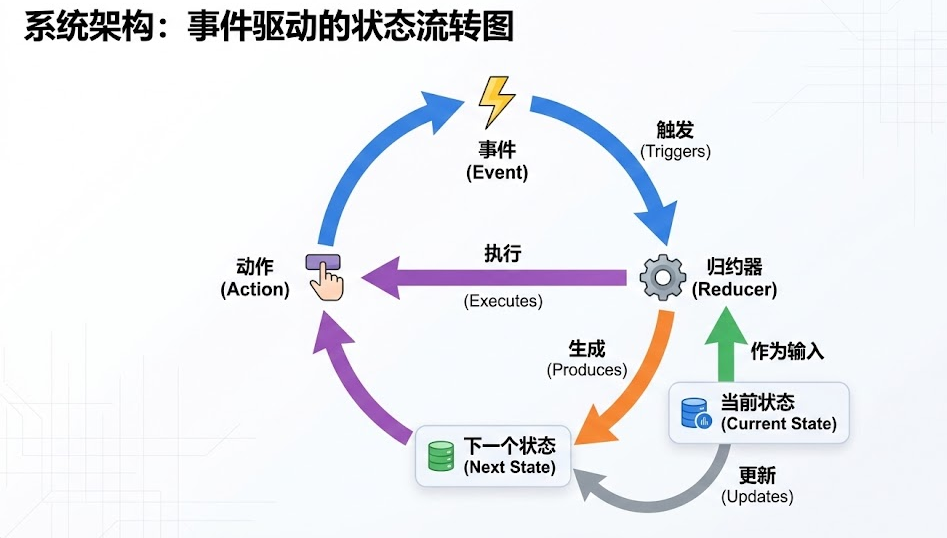
四、系统行为的四个固定角色
如果你想画出主因果链,必须先把系统角色严格定义。
我推荐下面这四个,这是在 FreeRTOS 下经过实战验证的最稳定分层。
4.1 Event:事实载体
Event 表示"发生了什么",而不是"该怎么办"。
Event 的正确命名
// ✅ 好的 Event 命名(描述事实)
EVT_BUTTON_PRESSED // 按钮被按下
EVT_UART_DATA_RECEIVED // UART 收到数据
EVT_TEMP_OVER_THRESHOLD // 温度超过阈值
EVT_COMM_TIMEOUT // 通信超时
EVT_TIMER_1S_EXPIRED // 1秒定时器到期
// ❌ 不好的 Event 命名(带决策)
EVT_SYSTEM_SHOULD_ERROR // 带判断
EVT_ENTER_WORKING_MODE // 带决策
EVT_MOTOR_STOP_NOW // 带行动指令
Event 数据结构设计
// Event 必须携带足够的上下文信息
typedef struct {
uint8_t type; // 事件类型
uint32_t timestamp; // 时间戳
uint8_t priority; // 优先级
union {
struct {
uint8_t pin_id;
} button;
struct {
uint8_t *data;
uint16_t len;
} uart;
struct {
float value;
uint8_t sensor_id;
} sensor;
} params;
} system_event_t;
4.2 State:系统所处阶段
State 表示系统当前的宏观阶段,而不是某个具体行为。
State 的正确命名
// ✅ 好的 State 命名(宏观阶段)
SYS_INIT // 初始化阶段
SYS_IDLE // 空闲待命
SYS_WORKING // 工作中
SYS_ERROR // 错误状态
SYS_MAINTENANCE // 维护模式
SYS_DFU // 固件升级
// ❌ 不好的 State 命名(具体行为)
SYS_MOTOR_RUNNING // 这是一个动作,不是状态
SYS_BLE_CONNECTING // 这是一个过程
SYS_FLASH_WRITING // 这是一个子功能
一次只能有一个 State
typedef struct {
sys_state_t current_state; // 当前状态
sys_state_t previous_state; // 上一个状态(用于状态恢复)
uint32_t state_entry_time; // 进入当前状态的时间
uint8_t error_code; // 错误码(仅在 ERROR 状态有效)
} system_state_machine_t;
4.3 Reducer:唯一决策者
这是整条主因果链的核心。
Reducer 的责任只有一个:
当前 State + 某个 Event → 下一步 State 和 Action
Reducer 的金科玉律
/**
* @brief 系统核心决策函数
* @note 金科玉律:这是整个系统中唯一允许修改 state 的地方
*
* @param ctx 系统上下文(包含当前 state)
* @param evt 触发的事件
*
* @return 无,但会触发对应的 Action
*/
void system_reducer(system_ctx_t *ctx, const system_event_t *evt) {
// 状态机的核心逻辑
switch(ctx->state_machine.current_state) {
case SYS_IDLE:
handle_idle_state(ctx, evt);
break;
case SYS_WORKING:
handle_working_state(ctx, evt);
break;
case SYS_ERROR:
handle_error_state(ctx, evt);
break;
// ...其他状态
}
}
关键原则:
- 状态变化只能发生在 reducer 内
- reducer 必须是同步的(不能阻塞)
- reducer 不直接干活,只调度 Action
4.4 Action:被调度的行为
Action 是具体干活的"工人",被 Reducer 调度。
Action 的分类
// 即时 Action(在 Reducer 里直接调用)
void action_led_blink(uint8_t times);
void action_save_error_log(uint16_t code);
// 异步 Action(发送消息给其他 Task)
void action_start_ble_advertising(void);
void action_stop_motor(void);
void action_enter_dfu_mode(void);
// 延迟 Action(启动定时器)
void action_start_timeout_check(uint32_t ms);
Action 实现示例
// Action 可以是异步的
void action_start_motor(void) {
motor_cmd_t cmd = {
.cmd = MOTOR_CMD_START,
.speed = 1000
};
xQueueSend(motor_cmd_queue, &cmd, 0);
}
// Action 可以是同步的
void action_save_error_log(uint16_t code) {
log_entry_t entry = {
.timestamp = xTaskGetTickCount(),
.error_code = code,
.state = system_ctx.state_machine.current_state
};
log_write(&entry);
}
五、STM32 + FreeRTOS 完整实现
下面是可以直接复制到工程的完整代码。
5.1 工程结构设计
project/
├── Core/
│ ├── Inc/
│ │ ├── system_event.h # Event 定义
│ │ ├── system_state.h # State 定义
│ │ ├── system_reducer.h # Reducer 接口
│ │ └── system_config.h # 系统配置
│ └── Src/
│ ├── system_event.c # Event 处理
│ ├── system_state.c # State 管理
│ ├── system_reducer.c # Reducer 实现
│ └── system_main.c # 系统主 Task
├── Drivers/
│ ├── motor/
│ ├── ble/
│ └── flash/
└── Middlewares/
└── FreeRTOS/
5.2 核心数据结构定义
system_event.h
/**
* @file system_event.h
* @brief 系统事件定义(事实层)
* @author wotaifuzao
* @date 2026-02-08
*/
#ifndef __SYSTEM_EVENT_H
#define __SYSTEM_EVENT_H
#include <stdint.h>
#include <stdbool.h>
/*
* ============================================================================
* 事件类型枚举(只描述"发生了什么",不带判断)
* ============================================================================
*/
typedef enum {
// 系统内部事件
EVT_SYSTEM_INIT_DONE = 0x00,
EVT_SYSTEM_HEARTBEAT,
// 按键事件
EVT_BUTTON_PRESSED,
EVT_BUTTON_LONG_PRESSED,
EVT_BUTTON_RELEASED,
// 通信事件
EVT_UART_DATA_RECEIVED,
EVT_COMM_TIMEOUT,
EVT_BLE_CONNECTED,
EVT_BLE_DISCONNECTED,
// 传感器事件
EVT_TEMP_OVER_THRESHOLD,
EVT_TEMP_NORMAL,
EVT_SENSOR_FAILURE,
// 定时器事件
EVT_TIMER_1S_EXPIRED,
EVT_TIMER_WATCHDOG,
// 错误事件
EVT_ERROR_DETECTED,
EVT_ERROR_RECOVERED,
EVT_MAX
} system_event_type_t;
/*
* ============================================================================
* 事件参数联合体(携带上下文信息)
* ============================================================================
*/
typedef struct {
uint8_t pin_id;
uint32_t press_duration_ms;
} button_event_params_t;
typedef struct {
uint8_t *data;
uint16_t length;
uint8_t interface_id; // UART1, UART2, etc.
} comm_event_params_t;
typedef struct {
float value;
uint8_t sensor_id;
uint8_t unit; // 0=Celsius, 1=Humidity%, etc.
} sensor_event_params_t;
typedef struct {
uint16_t error_code;
uint8_t module_id; // 哪个模块报错
char description[32];
} error_event_params_t;
/*
* ============================================================================
* 系统事件结构(核心数据结构)
* ============================================================================
*/
typedef struct {
system_event_type_t type; // 事件类型
uint32_t timestamp; // 时间戳(FreeRTOS ticks)
uint8_t priority; // 优先级 (0-255, 越高越优先)
uint8_t source; // 事件来源(ISR, Task, Timer)
union {
button_event_params_t button;
comm_event_params_t comm;
sensor_event_params_t sensor;
error_event_params_t error;
uint8_t raw[16]; // 通用数据缓存
} params;
} system_event_t;
/*
* ============================================================================
* 事件队列配置
* ============================================================================
*/
#define SYSTEM_EVENT_QUEUE_SIZE 32 // 队列深度
#define SYSTEM_EVENT_PRIORITY_LOW 0
#define SYSTEM_EVENT_PRIORITY_NORMAL 128
#define SYSTEM_EVENT_PRIORITY_HIGH 255
#endif /* __SYSTEM_EVENT_H */
system_state.h
/**
* @file system_state.h
* @brief 系统状态定义(阶段层)
* @author wotaifuzao
* @date 2026-02-08
*/
#ifndef __SYSTEM_STATE_H
#define __SYSTEM_STATE_H
#include <stdint.h>
#include <stdbool.h>
/*
* ============================================================================
* 系统状态枚举(宏观阶段,不是具体行为)
* ============================================================================
*/
typedef enum {
// 初始化阶段
SYS_STATE_INIT = 0x00,
SYS_STATE_HARDWARE_CHECK,
SYS_STATE_SELF_TEST,
// 正常运行阶段
SYS_STATE_IDLE, // 空闲待命
SYS_STATE_WORKING, // 正常工作
SYS_STATE_PAUSED, // 暂停
// 异常状态
SYS_STATE_ERROR, // 错误状态
SYS_STATE_FATAL_ERROR, // 致命错误(不可恢复)
SYS_STATE_MAINTENANCE, // 维护模式
// 特殊模式
SYS_STATE_DFU, // 固件升级
SYS_STATE_CALIBRATION, // 校准模式
SYS_STATE_MAX
} system_state_t;
/*
* ============================================================================
* 系统状态机上下文
* ============================================================================
*/
typedef struct {
system_state_t current_state; // 当前状态
system_state_t previous_state; // 上一个状态
uint32_t state_entry_time; // 进入当前状态的时间戳
uint32_t state_duration_ms; // 在当前状态停留的时长
uint16_t error_code; // 错误码(仅在 ERROR 状态有效)
uint8_t error_count; // 错误计数(用于错误恢复判断)
bool state_changed; // 状态变化标志(用于 Action)
} system_state_machine_t;
/*
* ============================================================================
* 状态工具函数
* ============================================================================
*/
const char* system_state_to_string(system_state_t state);
bool system_is_error_state(system_state_t state);
bool system_is_working_state(system_state_t state);
#endif /* __SYSTEM_STATE_H */
system_reducer.h
/**
* @file system_reducer.h
* @brief 系统核心决策器(唯一决策层)
* @author wotaifuzao
* @date 2026-02-08
* @note 这是整个系统中唯一允许修改 system_state 的地方
*/
#ifndef __SYSTEM_REDUCER_H
#define __SYSTEM_REDUCER_H
#include "system_event.h"
#include "system_state.h"
/*
* ============================================================================
* 系统全局上下文(包含状态机)
* ============================================================================
*/
typedef struct {
system_state_machine_t state_machine;
// 系统配置(运行时可调)
struct {
uint32_t comm_timeout_ms;
float temp_threshold;
bool auto_recovery_enabled;
} config;
// 系统统计信息
struct {
uint32_t total_events_processed;
uint32_t state_change_count;
uint32_t error_count;
} stats;
// 硬件抽象接口
struct {
void (*led_on)(uint8_t led_id);
void (*led_off)(uint8_t led_id);
void (*motor_start)(uint16_t speed);
void (*motor_stop)(void);
void (*save_log)(const char* msg);
} hal;
} system_context_t;
/*
* ============================================================================
* Reducer 核心接口
* ============================================================================
*/
/**
* @brief 系统核心决策函数
* @note ⚠️ 金科玉律:这是整个系统中唯一允许修改 state 的地方
*
* @param ctx 系统上下文(包含当前 state)
* @param evt 触发的事件
* @return 无,但会通过 ctx->hal 触发对应的 Action
*/
void system_reducer(system_context_t *ctx, const system_event_t *evt);
/*
* ============================================================================
* 辅助调试接口
* ============================================================================
*/
void system_dump_state(const system_context_t *ctx);
const char* system_event_to_string(system_event_type_t type);
#endif /* __SYSTEM_REDUCER_H */
5.3 系统主循环实现
system_main.c
/**
* @file system_main.c
* @brief 系统主任务(事件分发 + Reducer 调度)
* @author wotaifuzao
* @date 2026-02-08
*/
#include "system_main.h"
#include "system_event.h"
#include "system_state.h"
#include "system_reducer.h"
#include "cmsis_os.h"
/*
* ============================================================================
* 全局变量
* ============================================================================
*/
static osMessageQueueId_t system_event_queue_handle = NULL;
static system_context_t g_system_ctx;
/*
* ============================================================================
* 系统主任务(主因果链的核心循环)
* ============================================================================
*/
/**
* @brief 系统主任务函数
* @note
* 这是系统的"心脏",所有事件最终都会汇聚到这里
* 所有决策都从这里发出
* 系统行为在这里可解释、可追踪
*
* @param argument 任务参数(未使用)
*/
void system_task(void *argument)
{
system_event_t evt;
osStatus_t status;
// 初始化系统上下文
system_context_init(&g_system_ctx);
// 发送初始化完成事件(自己给自己发消息)
system_event_t init_evt = {
.type = EVT_SYSTEM_INIT_DONE,
.timestamp = osKernelGetTickCount(),
.priority = SYSTEM_EVENT_PRIORITY_HIGH,
.source = 0 // Task
};
osMessageQueuePut(system_event_queue_handle, &init_evt, 0, 0);
// ========================================
// 主循环:系统唯一的决策入口
// ========================================
while(1) {
// 阻塞等待事件(这里是系统的"心跳暂停点")
status = osMessageQueueGet(
system_event_queue_handle,
&evt,
NULL,
osWaitForever // 永久阻塞,直到有事件
);
if(status == osOK) {
// ========================================
// 核心决策点:唯一的地方修改系统状态
// ========================================
system_reducer(&g_system_ctx, &evt);
// 更新统计信息
g_system_ctx.stats.total_events_processed++;
// 调试输出(可选,生产环境可关闭)
#ifdef DEBUG_SYSTEM_STATE
system_dump_event(&evt);
system_dump_state(&g_system_ctx);
#endif
}
}
}
/*
* ============================================================================
* 系统上下文初始化
* ============================================================================
*/
static void system_context_init(system_context_t *ctx)
{
memset(ctx, 0, sizeof(system_context_t));
// 初始化状态机
ctx->state_machine.current_state = SYS_STATE_INIT;
ctx->state_machine.previous_state = SYS_STATE_INIT;
ctx->state_machine.state_entry_time = osKernelGetTickCount();
ctx->state_machine.error_count = 0;
// 初始化默认配置
ctx->config.comm_timeout_ms = 5000;
ctx->config.temp_threshold = 80.0f;
ctx->config.auto_recovery_enabled = true;
// 注册硬件抽象接口(根据实际硬件修改)
ctx->hal.led_on = hal_led_on;
ctx->hal.led_off = hal_led_off;
ctx->hal.motor_start = hal_motor_start;
ctx->hal.motor_stop = hal_motor_stop;
ctx->hal.save_log = hal_save_log;
}
/*
* ============================================================================
* 事件发送接口(供其他模块调用)
* ============================================================================
*/
/**
* @brief 发送系统事件(从 Task 中调用)
* @param evt 事件指针
* @return osOK 成功,osError 其他错误
*/
osStatus_t system_send_event(const system_event_t *evt)
{
return osMessageQueuePut(system_event_queue_handle, evt, 0, 0);
}
/**
* @brief 发送系统事件(从 ISR 中调用)
* @param evt 事件指针
* @return osOK 成功,osError 其他错误
*/
osStatus_t system_send_event_from_isr(const system_event_t *evt)
{
return osMessageQueuePut(system_event_queue_handle, evt, 0, 0);
}
/*
* ============================================================================
* FreeRTOS 任务创建(在 main.c 或 MX_FREERTOS_Init 中调用)
* ============================================================================
*/
void system_task_init(void)
{
osThreadAttr_t attr = {0};
// 创建事件队列
system_event_queue_handle = osMessageQueueNew(
SYSTEM_EVENT_QUEUE_SIZE,
sizeof(system_event_t),
NULL
);
// 创建系统主任务
attr.name = "system_task";
attr.stack_size = 512 * 4; // 2KB stack
attr.priority = osPriorityNormal;
osThreadNew(system_task, NULL, &attr);
}
5.4 Reducer 完整实现
system_reducer.c
/**
* @file system_reducer.c
* @brief 系统核心决策器实现
* @author wotaifuzao
* @date 2026-02-08
* @warning 这是整个系统中唯一允许修改 system_state 的地方
*/
#include "system_reducer.h"
#include <stdio.h>
#include <string.h>
/*
* ============================================================================
* 内部辅助函数
* ============================================================================
*/
/**
* @brief 状态切换(唯一的状态修改入口)
* @note 所有状态变化必须通过这个函数
*/
static void state_transition(
system_context_t *ctx,
system_state_t new_state
) {
if(ctx->state_machine.current_state == new_state) {
return; // 状态未变化,直接返回
}
// 记录状态变化
ctx->state_machine.previous_state = ctx->state_machine.current_state;
ctx->state_machine.current_state = new_state;
ctx->state_machine.state_entry_time = osKernelGetTickCount();
ctx->state_machine.state_changed = true;
// 更新统计
ctx->stats.state_change_count++;
// 触发状态进入/退出 Action(可选)
system_on_state_changed(ctx, new_state);
}
/**
* @brief 进入错误状态的统一处理
*/
static void enter_error_state(
system_context_t *ctx,
uint16_t error_code,
const char *description
) {
ctx->state_machine.error_code = error_code;
ctx->state_machine.error_count++;
// 保存错误日志
if(ctx->hal.save_log) {
char log_buf[128];
snprintf(log_buf, sizeof(log_buf),
"ERROR: 0x%04X - %s", error_code, description);
ctx->hal.save_log(log_buf);
}
// 状态切换
state_transition(ctx, SYS_STATE_ERROR);
}
/*
* ============================================================================
* Reducer 核心实现(状态机逻辑)
* ============================================================================
*/
/**
* @brief 处理 INIT 状态
*/
static void handle_init_state(
system_context_t *ctx,
const system_event_t *evt
) {
switch(evt->type) {
case EVT_SYSTEM_INIT_DONE:
// 初始化完成,进入硬件检查
state_transition(ctx, SYS_STATE_HARDWARE_CHECK);
// 触发硬件检查 Action
ctx->hal.led_on(LED_POWER);
break;
default:
// INIT 状态忽略其他事件
break;
}
}
/**
* @brief 处理 IDLE 状态
*/
static void handle_idle_state(
system_context_t *ctx,
const system_event_t *evt
) {
switch(evt->type) {
case EVT_BUTTON_PRESSED:
// 按钮触发,进入工作状态
state_transition(ctx, SYS_STATE_WORKING);
// 触发启动 Action
ctx->hal.motor_start(1000);
ctx->hal.led_on(LED_WORKING);
break;
case EVT_TIMER_1S_EXPIRED:
// 心跳事件(保持系统活跃)
// 这里不改变状态,只是记录
break;
case EVT_ERROR_DETECTED:
// 进入错误状态
enter_error_state(ctx,
evt->params.error.error_code,
evt->params.error.description);
break;
case EVT_BLE_CONNECTED:
// BLE 连接不改变工作状态,只是记录
// 可以在这里触发通知 Action
break;
default:
break;
}
}
/**
* @brief 处理 WORKING 状态
*/
static void handle_working_state(
system_context_t *ctx,
const system_event_t *evt
) {
switch(evt->type) {
case EVT_BUTTON_PRESSED:
// 工作中按按钮,暂停工作
state_transition(ctx, SYS_STATE_PAUSED);
// 触发暂停 Action
ctx->hal.motor_stop();
ctx->hal.led_off(LED_WORKING);
ctx->hal.led_on(LED_PAUSED);
break;
case EVT_COMM_TIMEOUT:
// 通信超时,进入错误状态
enter_error_state(ctx,
0x0101, // 通信超时错误码
"Communication timeout");
ctx->hal.motor_stop();
ctx->hal.led_on(LED_ERROR);
break;
case EVT_TEMP_OVER_THRESHOLD:
// 温度超限,进入错误状态
enter_error_state(ctx,
0x0201, // 温度超限错误码
"Temperature over threshold");
ctx->hal.motor_stop();
ctx->hal.led_on(LED_ERROR);
break;
case EVT_TIMER_WATCHDOG:
// 看门狗超时(可能是某个任务卡死了)
enter_error_state(ctx,
0x0301,
"Watchdog timeout");
break;
default:
break;
}
}
/**
* @brief 处理 ERROR 状态
*/
static void handle_error_state(
system_context_t *ctx,
const system_event_t *evt
) {
switch(evt->type) {
case EVT_BUTTON_LONG_PRESSED:
// 长按按钮,尝试恢复
if(ctx->config.auto_recovery_enabled &&
ctx->state_machine.error_count < 3) {
// 错误次数少,允许恢复
state_transition(ctx, SYS_STATE_IDLE);
ctx->hal.led_off(LED_ERROR);
ctx->hal.led_on(LED_POWER);
} else {
// 错误次数过多,进入致命错误状态
state_transition(ctx, SYS_STATE_FATAL_ERROR);
// 致命错误需要重启才能恢复
ctx->hal.save_log("FATAL ERROR: Recovery failed");
}
break;
case EVT_ERROR_RECOVERED:
// 错误已恢复,返回 IDLE
state_transition(ctx, SYS_STATE_IDLE);
ctx->hal.led_off(LED_ERROR);
ctx->hal.led_on(LED_POWER);
break;
case EVT_TIMER_1S_EXPIRED:
// 错误状态下的心跳(闪烁 LED)
static uint8_t toggle = 0;
if(toggle) {
ctx->hal.led_on(LED_ERROR);
} else {
ctx->hal.led_off(LED_ERROR);
}
toggle = !toggle;
break;
default:
// ERROR 状态忽略大部分事件
// 这是一种"故障保护"机制
break;
}
}
/*
* ============================================================================
* 公共接口实现
* ============================================================================
*/
/**
* @brief 系统核心决策函数(主因果链的核心)
* @note 金科玉律:这是整个系统中唯一允许修改 state 的地方
*/
void system_reducer(system_context_t *ctx, const system_event_t *evt)
{
if(!ctx || !evt) {
return;
}
// 重置状态变化标志
ctx->state_machine.state_changed = false;
// 根据当前状态分发事件
switch(ctx->state_machine.current_state) {
case SYS_STATE_INIT:
handle_init_state(ctx, evt);
break;
case SYS_STATE_IDLE:
handle_idle_state(ctx, evt);
break;
case SYS_STATE_WORKING:
handle_working_state(ctx, evt);
break;
case SYS_STATE_PAUSED:
// 类似 IDLE,但可能需要不同的按钮行为
handle_idle_state(ctx, evt); // 复用 IDLE 逻辑
break;
case SYS_STATE_ERROR:
handle_error_state(ctx, evt);
break;
case SYS_STATE_FATAL_ERROR:
// 致命错误状态,不处理任何事件
// 只能通过系统重启恢复
break;
default:
// 未知状态,进入错误状态
enter_error_state(ctx, 0xFFFF, "Unknown state");
break;
}
}
/**
* @brief 状态变化回调(可选)
*/
static void system_on_state_changed(
system_context_t *ctx,
system_state_t new_state
) {
// 这里可以添加状态切换时的通用逻辑
// 比如记录日志、更新 UI 等
char log_buf[64];
snprintf(log_buf, sizeof(log_buf),
"State: %s -> %s",
system_state_to_string(ctx->state_machine.previous_state),
system_state_to_string(new_state));
ctx->hal.save_log(log_buf);
}
/*
* ============================================================================
* 辅助调试函数
* ============================================================================
*/
const char* system_state_to_string(system_state_t state) {
switch(state) {
case SYS_STATE_INIT: return "INIT";
case SYS_STATE_HARDWARE_CHECK: return "HW_CHECK";
case SYS_STATE_SELF_TEST: return "SELF_TEST";
case SYS_STATE_IDLE: return "IDLE";
case SYS_STATE_WORKING: return "WORKING";
case SYS_STATE_PAUSED: return "PAUSED";
case SYS_STATE_ERROR: return "ERROR";
case SYS_STATE_FATAL_ERROR: return "FATAL";
case SYS_STATE_MAINTENANCE: return "MAINT";
case SYS_STATE_DFU: return "DFU";
case SYS_STATE_CALIBRATION: return "CALIB";
default: return "UNKNOWN";
}
}
void system_dump_state(const system_context_t *ctx) {
printf("=== System State ===\n");
printf("Current: %s\n", system_state_to_string(ctx->state_machine.current_state));
printf("Previous: %s\n", system_state_to_string(ctx->state_machine.previous_state));
printf("Duration: %lu ms\n", ctx->state_machine.state_duration_ms);
printf("Errors: %u\n", ctx->state_machine.error_count);
printf("Events processed: %lu\n", ctx->stats.total_events_processed);
printf("====================\n");
}
5.5 ISR 接入规范
stm32xxxxit.c(标准 ISR 实现)
/**
* @file stm32xxxxit.c
* @brief 中断服务程序(只收集事件,不做决策)
* @author wotaifuzao
* @date 2026-02-08
* @note ISR 中只做一件事:将外部事件转换为系统事件并发送到队列
*/
#include "main.h"
#include "system_event.h"
#include "cmsis_os.h"
/*
* ============================================================================
* 外部中断线 0 中断(假设连接到按钮)
* ============================================================================
*/
void EXTI0_IRQHandler(void)
{
// ========================================
// 第一步:硬件层处理(清除中断标志)
// ========================================
if(LL_EXTI_IsActiveFlag_0_31(LL_EXTI_LINE_0)) {
LL_EXTI_ClearFlag_0_31(LL_EXTI_LINE_0);
// ========================================
// 第二步:软件层处理(发送事件)
// 注意:这里不做任何判断,只记录事实
// ========================================
// 防抖处理(可选,根据实际需求)
static uint32_t last_interrupt_time = 0;
uint32_t current_time = HAL_GetTick();
if(current_time - last_interrupt_time < 50) {
return; // 防抖,忽略 50ms 内的多次中断
}
last_interrupt_time = current_time;
// 构造系统事件
system_event_t evt = {
.type = EVT_BUTTON_PRESSED,
.timestamp = osKernelGetTickCount(),
.priority = SYSTEM_EVENT_PRIORITY_NORMAL,
.source = 1, // ISR
.params.button.pin_id = 0,
.params.button.press_duration_ms = 0 // 需要在释放时计算
};
// ========================================
// 第三步:发送到系统事件队列
// 使用 FromISR 版本的 API
// ========================================
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
osMessageQueuePut(system_event_queue_handle, &evt, 0, 0);
// 如果唤醒了更高优先级的任务,请求上下文切换
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
}
/*
* ============================================================================
* UART1 全局中断
* ============================================================================
*/
void USART1_IRQHandler(void)
{
// ========================================
// 第一步:硬件层处理(检查中断源)
// ========================================
if(LL_USART_IsActiveFlag_RXNE_RXFNE(USART1)) {
// 读取接收到的数据
uint8_t data = LL_USART_ReceiveData8(USART1);
// 将数据存入环形缓冲区(假设已有实现)
ring_buffer_push(&uart1_rx_buffer, data);
// ========================================
// 第二步:判断是否接收完整帧
// 注意:这里只检测帧结束,不解析内容
// ========================================
if(is_frame_complete(&uart1_rx_buffer)) {
// 构造系统事件
system_event_t evt = {
.type = EVT_UART_DATA_RECEIVED,
.timestamp = osKernelGetTickCount(),
.priority = SYSTEM_EVENT_PRIORITY_HIGH,
.source = 1, // ISR
};
// 拷贝数据到事件(注意栈大小限制)
evt.params.comm.data = uart1_rx_buffer.buffer;
evt.params.comm.length = uart1_rx_buffer.count;
evt.params.comm.interface_id = 1; // UART1
// ========================================
// 第三步:发送到系统事件队列
// ========================================
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
osMessageQueuePut(system_event_queue_handle, &evt, 0, 0);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
// 清除中断标志
LL_USART_ClearFlag_RXNE_RXFNE(USART1);
}
}
/*
* ============================================================================
* TIM6 定时器中断(假设用于周期性检测)
* ============================================================================
*/
void TIM6_DAC_IRQHandler(void)
{
if(LL_TIM_IsActiveFlag_UPDATE(TIM6)) {
// 清除中断标志
LL_TIM_ClearFlag_UPDATE(TIM6);
// ========================================
// 发送定时器事件
// 注意:定时器中断也应该只发送事件
// ========================================
static uint32_t tick_count = 0;
tick_count++;
system_event_t evt;
if(tick_count % 1000 == 0) {
// 每 1000 次中断发送一次 1 秒事件
evt.type = EVT_TIMER_1S_EXPIRED;
evt.timestamp = osKernelGetTickCount();
evt.priority = SYSTEM_EVENT_PRIORITY_LOW;
evt.source = 1;
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
osMessageQueuePut(system_event_queue_handle, &evt, 0, 0);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
}
}
/*
* ============================================================================
* 看门狗中断(如果使能)
* ============================================================================
*/
void WWDG_IRQHandler(void)
{
// 看门狗中断意味着系统卡死了
// 这里只能发送紧急事件,然后等待复位
system_event_t evt = {
.type = EVT_ERROR_DETECTED,
.timestamp = osKernelGetTickCount(),
.priority = SYSTEM_EVENT_PRIORITY_HIGH,
.source = 1,
};
evt.params.error.error_code = 0x0301; // 看门狗错误
evt.params.error.module_id = 0xFF; // 系统级
strncpy(evt.params.error.description,
"Watchdog timeout",
sizeof(evt.params.error.description));
osMessageQueuePut(system_event_queue_handle, &evt, 0, 0);
}
5.6 完整工程示例
main.c(系统启动)
/**
* @file main.c
* @brief 系统入口
* @author wotaifuzao
* @date 2026-02-08
*/
#include "main.h"
#include "cmsis_os.h"
#include "system_main.h"
/*
* ============================================================================
* 函数原型
* ============================================================================
*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_TIM6_Init(void);
/*
* ============================================================================
* 主函数
* ============================================================================
*/
int main(void)
{
// ========================================
// 第一步:硬件初始化
// ========================================
HAL_Init();
SystemClock_Config();
// 初始化外设
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM6_Init();
// ========================================
// 第二步:创建系统主任务(主因果链)
// ========================================
system_task_init();
// ========================================
// 第三步:启动 FreeRTOS 调度器
// 注意:调度器启动后,main() 线程会消失
// ========================================
osKernelStart();
// 永远不会执行到这里
while (1);
}
/*
* ============================================================================
* 硬件初始化函数
* ============================================================================
*/
void SystemClock_Config(void)
{
// 时钟配置(由 STM32CubeMX 生成)
// ...
}
static void MX_GPIO_Init(void)
{
// GPIO 初始化
// ...
}
static void MX_USART1_UART_Init(void)
{
// UART 初始化
// ...
}
static void MX_TIM6_Init(void)
{
// 定时器初始化(用于 1ms 周期性任务)
// ...
}
/*
* ============================================================================
* FreeRTOS 任务钩子(可选)
* ============================================================================
*/
void vApplicationIdleHook(void)
{
// 空闲任务钩子(用于低功耗)
__WFI();
}
void vApplicationMallocFailedHook(void)
{
// 内存分配失败处理
system_event_t evt = {
.type = EVT_ERROR_DETECTED,
.timestamp = osKernelGetTickCount(),
.priority = SYSTEM_EVENT_PRIORITY_HIGH,
};
evt.params.error.error_code = 0x0401; // 内存错误
strncpy(evt.params.error.description,
"Malloc failed",
sizeof(evt.params.error.description));
system_send_event(&evt);
}
六、如何"画"一条主因果链
6.1 绘制方法论
这是很多文章没有写清楚的地方。
你画的不是函数,而是因果
❌ 错误的画法: 函数调用流程图
main()
↓
system_task()
↓
xQueueReceive()
↓
system_reducer()
↓
handle_idle_state()
这种图毫无意义,因为:
- 没有体现状态变化
- 没有体现决策逻辑
- 没有体现因果链
✅ 正确的画法: 事件-状态决策图
当前状态: IDLE
↓
收到事件: EVT_BUTTON_PRESSED
↓
进入 Reducer: handle_idle_state()
↓
判断逻辑:
if(evt->type == EVT_BUTTON_PRESSED) {
next_state = WORKING;
action_start_motor();
}
↓
状态变化: IDLE → WORKING
↓
触发 Action:
- motor_start(1000)
- led_on(LED_WORKING)
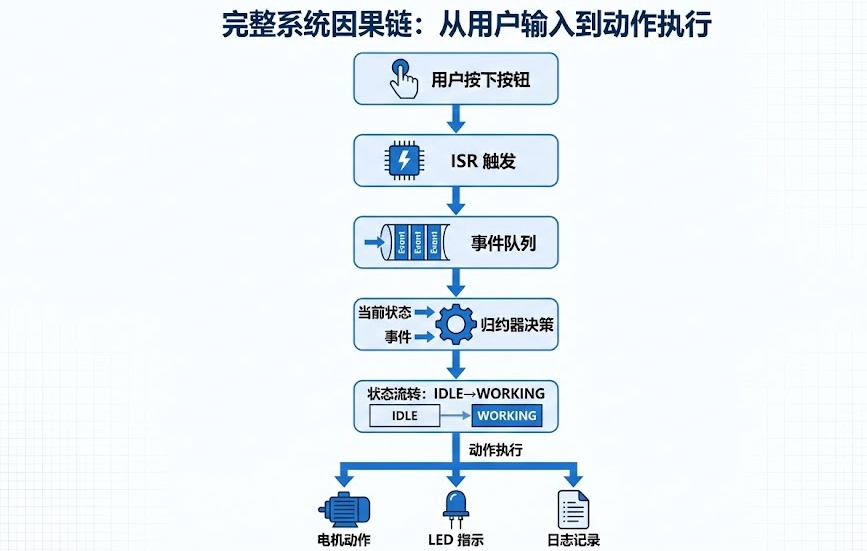
一个完整的实例
假设我们要画"按钮启动电机"的完整因果链:
Step 1: 从外部事件开始
物理世界:
用户按下按钮
↓
硬件层:
EXTI0_IRQHandler 被触发
↓
事件层:
EVT_BUTTON_PRESSED 被发送到队列
Step 2: 进入决策层
事件队列:
[EVT_BUTTON_PRESSED] 等待处理
↓
系统主循环:
system_task 从队列中取出事件
↓
Reducer 决策:
当前状态: IDLE
收到事件: EVT_BUTTON_PRESSED
→ 决策: 切换到 WORKING 状态
Step 3: 状态变化 + 触发行为
状态变化:
IDLE → WORKING
↓
Action 执行:
1. motor_start(1000) // 启动电机
2. led_on(LED_WORKING) // 点亮工作指示灯
3. log("State: WORKING") // 记录日志
↓
系统进入新状态:
等待下一个事件...
6.2 自检验证标准
如果你无法用下面这句话描述系统:
“在 XXX 状态下,收到 YYY 事件,系统一定会做 ZZZ”
说明主因果链没有成立。
验证清单
- 每个状态都能画出决策树
- 每个事件都有明确的来源(ISR / Timer / Task)
- 每个状态变化都能追溯到 Reducer
- 每个 Action 都由状态变化触发
- 系统中没有"隐形"的状态修改点
一个反例检查
// ❌ 违反主因果链的代码
void some_task(void) {
if(error_detected) {
current_state = ERROR; // 直接改状态!
}
}
诊断问题:
- 这个状态变化在 Reducer 之外
- 无法画出完整的因果链
- 系统行为不可解释
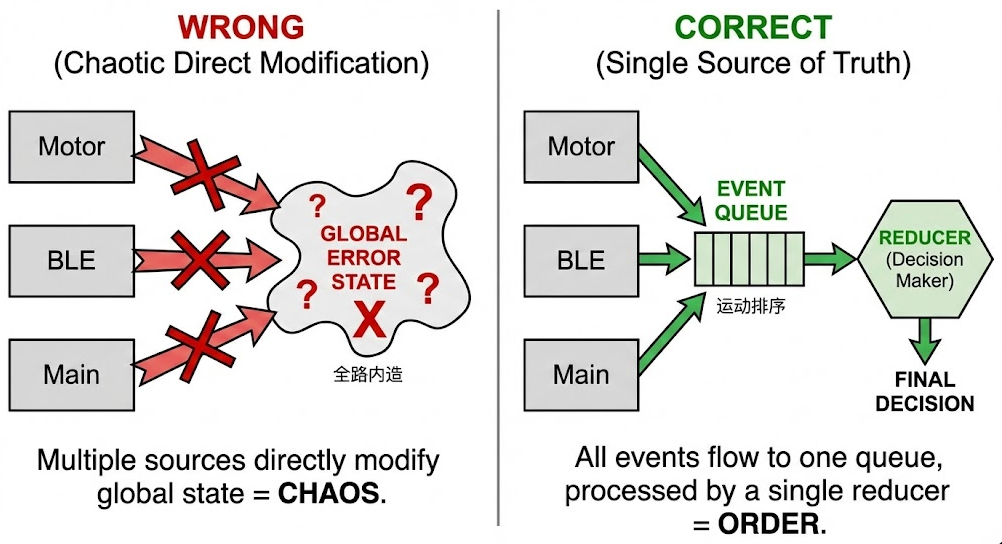
七、常见三个致命坑
7.1 状态被多模块修改
错误示例
// 文件1: motor.c
void motor_task(void) {
if(motor_overheat()) {
system_state = ERROR; // ❌ 决策点1
}
}
// 文件2: ble.c
void ble_task(void) {
if(connection_timeout()) {
system_state = ERROR; // ❌ 决策点2
}
}
// 文件3: main.c
void main_task(void) {
if(watchdog_timeout()) {
system_state = ERROR; // ❌ 决策点3
}
}
问题分析
- ERROR 状态有 3 个入口
- 无法回答:“当前 ERROR 是怎么来的?”
- 无法针对不同错误做不同处理
正确做法
// 所有模块只发送事件,不修改状态
void motor_task(void) {
if(motor_overheat()) {
system_event_t evt = {
.type = EVT_ERROR_DETECTED,
.params.error.error_code = 0x0201,
.params.error.module_id = MOTOR_MODULE
};
system_send_event(&evt); // ✅ 只发送事件
}
}
// Reducer 统一决策
void system_reducer(ctx, evt) {
if(evt->type == EVT_ERROR_DETECTED) {
switch(evt->params.error.module_id) {
case MOTOR_MODULE:
ctx->error_detail = "Motor overheat";
break;
case BLE_MODULE:
ctx->error_detail = "BLE timeout";
break;
}
state_transition(ctx, SYS_STATE_ERROR); // ✅ 唯一的状态修改点
}
}
7.2 一个 Event 触发多决策
错误示例
// ❌ 一个事件被多个任务处理
void system_task(void) {
system_event_t evt;
xQueueReceive(q, &evt, portMAX_DELAY);
// 决策点1
if(evt.type == EVT_TIMER_1S) {
do_something();
}
}
void another_task(void) {
system_event_t evt;
xQueueReceive(q, &evt, portMAX_DELAY);
// 决策点2(处理同一个事件!)
if(evt.type == EVT_TIMER_1S) {
do_another_thing();
}
}
问题分析
- 一个事件有 2 个决策点
- 两个决策可能冲突
- 系统行为不可预测
正确做法
// ✅ 事件只在一个地方处理
void system_reducer(ctx, evt) {
if(evt->type == EVT_TIMER_1S) {
// 唯一的决策点
if(ctx->state == WORKING) {
action_update_display();
}
if(ctx->state == ERROR) {
action_toggle_error_led();
}
// 所有相关决策都在这里集中做
}
}
核心原则:
- Event 可以广播(通知多个模块)
- 但决策只能有一个中心
7.3 把 Action 当成状态
错误示例
// ❌ 把过程当作状态
typedef enum {
STATE_IDLE,
STATE_MOTOR_STARTING, // 这是一个过程,不是状态
STATE_MOTOR_RUNNING,
STATE_BLE_CONNECTING, // 这也是一个过程
STATE_BLE_CONNECTED
} system_state_t;
问题分析
MOTOR_STARTING是一个瞬态过程,可能只持续 100msBLE_CONNECTING是一个等待过程,不是系统阶段- 状态爆炸:每个动作都变成一个状态
- 无法体现系统的宏观阶段
正确做法
// ✅ 宏观阶段 + 动作状态分离
typedef enum {
// 系统宏观阶段(State)
SYS_IDLE,
SYS_WORKING,
SYS_ERROR
} system_state_t;
// 动作执行状态(Action 的内部状态,不进入主状态机)
typedef enum {
ACTION_IDLE,
ACTION_EXECUTING,
ACTION_COMPLETED,
ACTION_FAILED
} action_status_t;
// Reducer 决策
void system_reducer(ctx, evt) {
switch(ctx->state) {
case SYS_IDLE:
if(evt->type == EVT_BUTTON_PRESSED) {
state_transition(ctx, SYS_WORKING);
action_start_motor(); // 启动动作,但不改变系统状态
}
break;
}
}
区分原则:
- State:系统的宏观阶段(INIT / IDLE / WORKING / ERROR)
- Action:具体的行为过程(电机启动 / BLE 连接 / Flash 写入)
八、为什么这套架构长期稳定
因为它满足三点:
8.1 行为可解释
// 你可以清晰地回答:"系统为什么会进入 ERROR 状态?"
答:在 WORKING 状态下,收到 EVT_COMM_TIMEOUT 事件,Reducer 决策进入 ERROR。
// 进一步:"为什么会有 EVT_COMM_TIMEOUT?"
答:UART 接收超时(可以在 ISR 层追溯)。
// 再进一步:"进入 ERROR 后做了什么?"
答:停止电机、点亮错误 LED、保存错误日志。
8.2 逻辑可视化
你可以画出一张图,让新人在 10 分钟内理解整个系统的运行逻辑。
这张图会成为团队的核心文档。
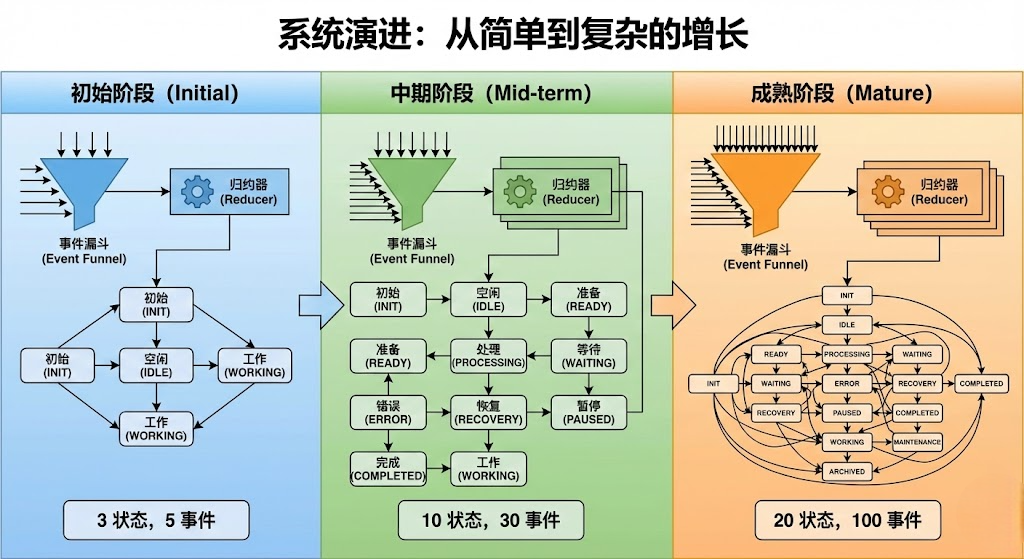
8.3 架构可演进
- 初期:3 个状态,5 个事件
- 中期:10 个状态,30 个事件
- 后期:20 个状态,100 个事件
但主因果链的结构不变,只是内容增加。
这也是 Zephyr RTOS、Redux(前端状态管理)、Actor Model(分布式系统) 背后的同一套思想。
九、总结与互动
核心心法
代码可以分散,但系统的因果链必须集中。
当你能画出系统的主因果链时,你才真正开始**“设计系统”,而不是"堆功能"**。
检验标准
你的系统是否满足:
- ✅ 能否用一句话描述"在 XXX 状态下,收到 YYY 事件,系统一定会做 ZZZ"?
- ✅ 能否画出一张完整的事件-状态决策图?
- ✅ 能否精确到代码:状态变化发生在哪个文件的哪一行?
- ✅ 新人能否在 10 分钟内看懂系统行为?
如果有一条不满足,说明系统架构需要重构。
互动讨论
请在评论区回答以下问题(我会逐条回复):
- 你现在的项目,能画出一条主因果链吗?如果能,发一张图看看?
- 你遇到过哪些"状态莫名奇妙变了"的坑?最后是怎么排查出来的?
- 除了 FreeRTOS,你用过哪些类似的状态管理模式?(比如 Zephyr、Redux、自己造轮子)
- 你觉得这套模式最大的难点是什么? 是理解概念还是落地实施?
👇 如果这篇文章对你有帮助:
- 点个赞,让更多嵌入式工程师看到
- 收藏起来,项目启动时翻出来看看
- 关注我,下一篇我会讲"如何用工具自动生成主因果链文档"
🔥 挑战一下:
在评论区用一句话描述你项目的核心因果链:
“我的系统在 ___ 状态下,收到 ___ 事件,会 ___”
相关推荐

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 16
16 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)