
动态仿生机制优化算法无人机应用【附代码】
在迭代中后期,动态引入鸽群的地磁导航和地标算子,并加入惯性权重因子,增强粒子在局部区域的精细搜索能力。此外,根据一阶线性时变差分方程理论,对改进算法的位置更新公式进行了稳定性分析,证明了该算法在数学上的收敛性,并计算了其时间复杂度,确保了其在嵌入式系统中的可实现性。仿真实验设置了包含静态山峰和动态雷达威胁区的复杂场景,结果显示,改进后的多目标算法能够生成一组多样化的路径方案供决策者选择,且在面对突

✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅成品或者定制,扫描文章底部微信二维码。
(1) 混合动态仿生优化算法的机理与改进
随着无人机任务环境的日益复杂,单一的仿生算法往往难以兼顾全局探索与局部开发。本研究首先分析了灰狼优化算法(GWO)和鸽群优化算法(PIO)的生物学机理,针对灰狼算法收敛速度快但易早熟、鸽群算法后期精度不足的问题,提出了一种混合动态仿生优化策略。该策略引入了“动态切换机制”,在迭代初期模仿灰狼的包围和狩猎行为,利用其收敛因子线性递减的特性快速压缩搜索空间;在迭代中后期,动态引入鸽群的地磁导航和地标算子,并加入惯性权重因子,增强粒子在局部区域的精细搜索能力。此外,根据一阶线性时变差分方程理论,对改进算法的位置更新公式进行了稳定性分析,证明了该算法在数学上的收敛性,并计算了其时间复杂度,确保了其在嵌入式系统中的可实现性。
**((2) 基于高维建模的无人机三维路径规划
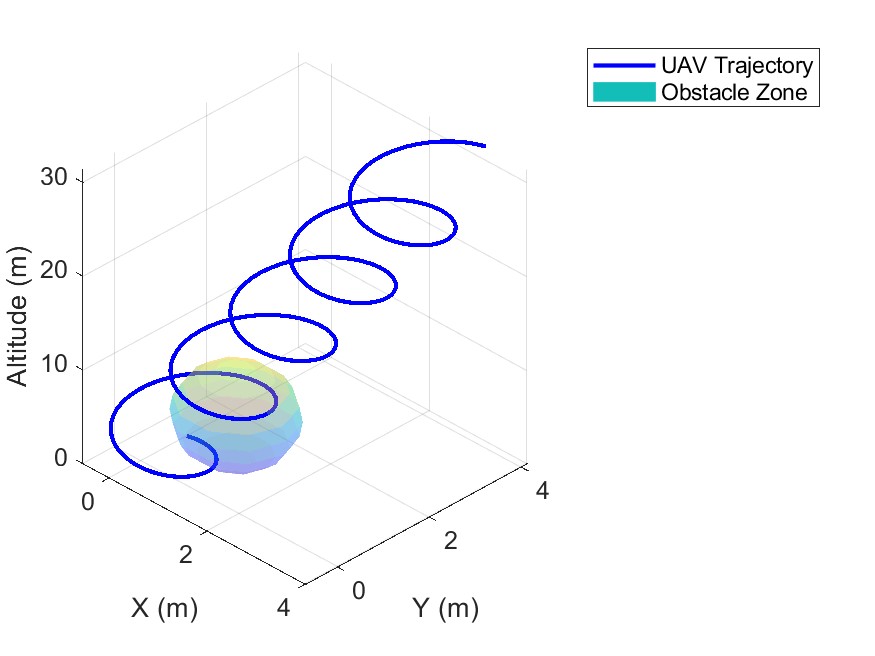
针对无人机在复杂山地或城市环境中的三维路径规划问题,本文构建了一个高维单目标优化模型。将路径规划转化为一系列三维空间坐标点的寻优问题,目标函数综合考虑了路径长度、飞行高度安全限制、爬升/俯冲角度约束以及最小转弯半径。为了处理这些复杂的非线性约束,采用惩罚函数法将有约束优化转化为无约束优化。针对传统算法在高维空间中“维数灾难”导致的搜索效率低下,研究提出了一种基于动态收敛因子和自适应权重的策略。通过限制种群初始化的范围,并利用混沌映射生成初始解,提高了初始种群的遍历性。在寻优过程中,利用算法的最优值理论,证明了所提出的多策略改进算法能够在有限的迭代次数内收敛到满足工程要求的稳态解,有效规划出一条既安全又节能的三维飞行轨迹。
(3) 多目标帕累托排序与动态环境适应性
考虑到无人机任务往往涉及多个相互冲突的目标(如最短时间、最小能耗、最低被发现概率),研究进一步扩展了动态仿生算法,设计了多目标帕累托排序鲸鱼优化算法(MO-WOA)。引入了帕累托支配概念和外部档案库机制来存储非支配解集,并采用基于网格密度的剔除策略来维护档案库的多样性,防止“数据爆炸”。结合无人机地空通信模型,将通信连接质量作为新的优化目标纳入考量。仿真实验设置了包含静态山峰和动态雷达威胁区的复杂场景,结果显示,改进后的多目标算法能够生成一组多样化的路径方案供决策者选择,且在面对突发威胁时,算法具备良好的动态重规划能力,能够实时调整航迹以规避风险,验证了其在动态环境下的鲁棒性和实用性。
function uav_path_planning_bionic()
clc; clear; close all;
StartPos = [0, 0, 0];
TargetPos = [100, 100, 50];
NumWaypoints = 10;
NumVars = NumWaypoints * 3;
PopSize = 40;
MaxIter = 100;
Limits = [0, 100; 0, 100; 0, 60];
% Initialize Population (Wolf/Pigeon Hybrid)
Alpha_Pos = zeros(1, NumVars); Alpha_Score = inf;
Beta_Pos = zeros(1, NumVars); Beta_Score = inf;
Delta_Pos = zeros(1, NumVars); Delta_Score = inf;
Positions = rand(PopSize, NumVars) .* 100;
for t = 1:MaxIter
a = 2 - t * (2 / MaxIter); % Linear decrease
for i = 1:PopSize
% Evaluate Fitness (Path Length + Threat Avoidance)
fitness = calculate_cost(Positions(i,:), StartPos, TargetPos);
if fitness < Alpha_Score
Alpha_Score = fitness; Alpha_Pos = Positions(i,:);
elseif fitness < Beta_Score
Beta_Score = fitness; Beta_Pos = Positions(i,:);
elseif fitness < Delta_Score
Delta_Score = fitness; Delta_Pos = Positions(i,:);
end
end
% Update Positions (Hybrid Mechanism)
for i = 1:PopSize
for j = 1:NumVars
% GWO Strategy
r1 = rand; r2 = rand;
A1 = 2*a*r1 - a; C1 = 2*r2;
D_alpha = abs(C1*Alpha_Pos(j) - Positions(i,j));
X1 = Alpha_Pos(j) - A1*D_alpha;
% Dynamic Pigeon Strategy injection at later stages
if t > MaxIter * 0.5 && rand < 0.3
X_new = X1 + (rand-0.5)*2 * (Alpha_Pos(j) - Positions(i,j));
else
r1=rand; r2=rand; A2=2*a*r1-a; C2=2*r2;
D_beta = abs(C2*Beta_Pos(j) - Positions(i,j));
X2 = Beta_Pos(j) - A2*D_beta;
r1=rand; r2=rand; A3=2*a*r1-a; C3=2*r2;
D_delta = abs(C3*Delta_Pos(j) - Positions(i,j));
X3 = Delta_Pos(j) - A3*D_delta;
X_new = (X1 + X2 + X3) / 3;
end
Positions(i,j) = X_new;
end
end
% Boundary Check
Positions = max(Positions, 0);
end
fprintf('Best Path Cost: %.4f\n', Alpha_Score);
plot_path(StartPos, TargetPos, Alpha_Pos);
end
function cost = calculate_cost(vars, start_p, end_p)
pts = reshape(vars, [], 3);
pts = [start_p; pts; end_p];
len = 0;
threat = 0;
Obstacle = [50, 50, 20, 15]; % x,y,z,radius
for k = 1:size(pts,1)-1
seg_len = norm(pts(k,:) - pts(k+1,:));
len = len + seg_len;
% Simple collision check sample
mid = (pts(k,:) + pts(k+1,:))/2;
dist_obs = norm(mid - Obstacle(1:3));
if dist_obs < Obstacle(4)
threat = threat + 1000;
end
end
smoothness = 0; % Simplified
cost = len + threat + smoothness;
end
function plot_path(s, e, waypoints)
pts = reshape(waypoints, [], 3);
pts = [s; pts; e];
plot3(pts(:,1), pts(:,2), pts(:,3), 'b-o', 'LineWidth', 2); hold on;
[x,y,z] = sphere;
surf(x*15+50, y*15+50, z*15+20, 'FaceAlpha', 0.3, 'EdgeColor', 'none');
grid on; xlabel('X'); ylabel('Y'); zlabel('Z');
title('Optimized UAV Trajectory');
end
成品代码50-200,定制300起,可以直接沟通
👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇👇

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)