
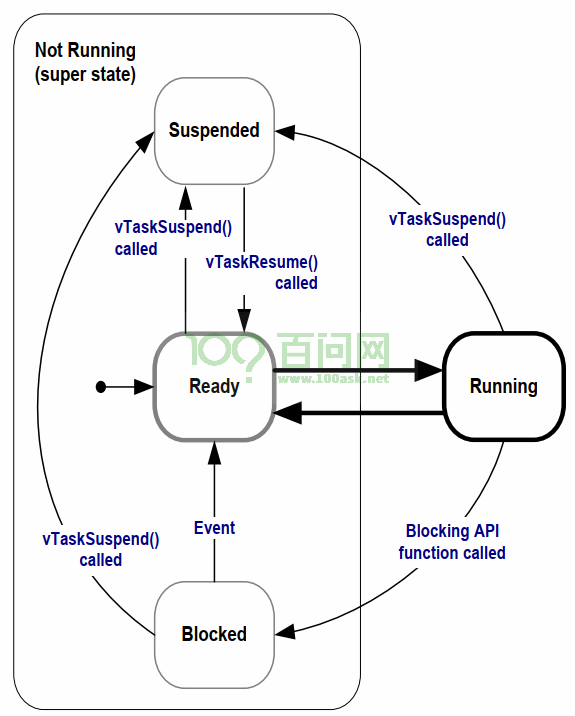
FreeRTOS任务状态
内容来源于b站 韦东山-FreeRTOS教程。阻塞blocked(等待某些event)全部代码freertos.c。suspended(暂停)
·
内容来源于b站 韦东山-FreeRTOS教程
Ready/Running
阻塞blocked(等待某些event)
suspended(暂停)
核心代码:
else
{
/* 要么suspend,要么resume */
if(brunning == 1)
{
vTaskSuspend(xSoundTaskHandle);//暂停
brunning = 0;
}
else
{
vTaskResume(xSoundTaskHandle);//恢复
brunning = 1;
}
}全部代码freertos.c
/* USER CODE BEGIN Header */
#include "driver_led.h"
#include "driver_lcd.h"
#include "driver_mpu6050.h"
#include "driver_timer.h"
#include "driver_ds18b20.h"
#include "driver_dht11.h"
#include "driver_active_buzzer.h"
#include "driver_passive_buzzer.h"
#include "driver_color_led.h"
#include "driver_ir_receiver.h"
#include "driver_ir_sender.h"
#include "driver_light_sensor.h"
#include "driver_ir_obstacle.h"
#include "driver_ultrasonic_sr04.h"
#include "driver_spiflash_w25q64.h"
#include "driver_rotary_encoder.h"
#include "driver_motor.h"
#include "driver_key.h"
#include "driver_uart.h"
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
static StackType_t g_pucStackOfLightTask[128];
static StaticTask_t g_TCBofLightTask;
static TaskHandle_t xLightTaskHandle;
static StackType_t g_pucStackOfColorTask[128];
static StaticTask_t g_TCBofColorTask;
static TaskHandle_t xColorTaskHandle;
/* USER CODE END Variables */
/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {
.name = "defaultTask",
.stack_size = 128 * 4,
.priority = (osPriority_t) osPriorityNormal,
};
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void *argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* creation of defaultTask */
defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* 创建任务:声 */
//extern void PlayMusic(void *params);
//ret = xTaskCreate(PlayMusic,"SoundTask",128,NULL,osPriorityNormal,&xSoundTaskHandle);
/* 创建任务:光 */
xLightTaskHandle = xTaskCreateStatic(Led_Test,"LightTask",128,NULL,osPriorityNormal,g_pucStackOfLightTask,&g_TCBofLightTask);
/* 创建任务:色 */
xColorTaskHandle = xTaskCreateStatic(ColorLED_Test,"ColorTask",128,NULL,osPriorityNormal,g_pucStackOfColorTask,&g_TCBofColorTask);
/* USER CODE END RTOS_THREADS */
/* USER CODE BEGIN RTOS_EVENTS */
/* add events, ... */
/* USER CODE END RTOS_EVENTS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
uint8_t dev, data;
int len;
int status;
int brunning;
TaskHandle_t xSoundTaskHandle = NULL;
BaseType_t ret;
LCD_Init();
LCD_Clear();
IRReceiver_Init();
LCD_PrintString(0,0,"waiting control");
while (1)
{
/* 读取红外遥控器 */
if(IRReceiver_Read(&dev,&data)==0)
{
if(data == 0xa8)/* play */
{
/* 创建播放音乐的任务 */
extern void PlayMusic(void *params);
if(xSoundTaskHandle == NULL)
{
LCD_ClearLine(0,0);
LCD_PrintString(0,0,"create task");
ret = xTaskCreate(PlayMusic,"SoundTask",128,NULL,osPriorityNormal+1,&xSoundTaskHandle);
brunning = 1;
}
else
{
/* 要么suspend,要么resume */
if(brunning == 1)
{
vTaskSuspend(xSoundTaskHandle);//暂停
LCD_ClearLine(0,0);
LCD_PrintString(0,0,"suspend task");
PassiveBuzzer_Control(0);/* 停止蜂鸣器 */
brunning = 0;
}
else
{
LCD_ClearLine(0,0);
LCD_PrintString(0,0,"resume task");
vTaskResume(xSoundTaskHandle);//恢复
brunning = 1;
}
}
}
else if(data == 0xa2)/* power */
{
/* 删除播放音乐的任务 */
if(xSoundTaskHandle != NULL)
{
LCD_ClearLine(0,0);
LCD_PrintString(0,0,"delete task");
vTaskDelete(xSoundTaskHandle);
PassiveBuzzer_Control(0);
xSoundTaskHandle = NULL;
}
}
}
}
/* USER CODE END StartDefaultTask */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 0
0 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)