
Logo、模式、特殊形状识别技术:基于C++ C#与OpenCV的模板匹配应用
最后来个冷知识:用C++的OpenCV处理200ms每帧,换成C#+EmguCV可能变成300ms。不是语言问题,而是托管代码的GC在作妖,实时系统记得用Native代码+内存池优化。模板匹配像是精准的狙击枪,特征匹配像霰弹枪——没有绝对的好坏,关键看场景。下次在便利店看到自动识别Logo的机器,说不定里面正跑着类似的代码逻辑呢。Logo识别,模式识别,特殊形状识别,模板匹配,C++/C#,ope
Logo识别,模式识别,特殊形状识别,模板匹配,C++/C#,openCV
深夜赶工写代码的时候,总想喝罐冰可乐提神。某天盯着易拉罐上的红色波浪Logo突然想:要是摄像头能自动识别这个标志,联动自动售货机补货该多有趣。这念头让我打开了OpenCV文档,折腾起模板匹配的魔法。
Logo识别,模式识别,特殊形状识别,模板匹配,C++/C#,openCV
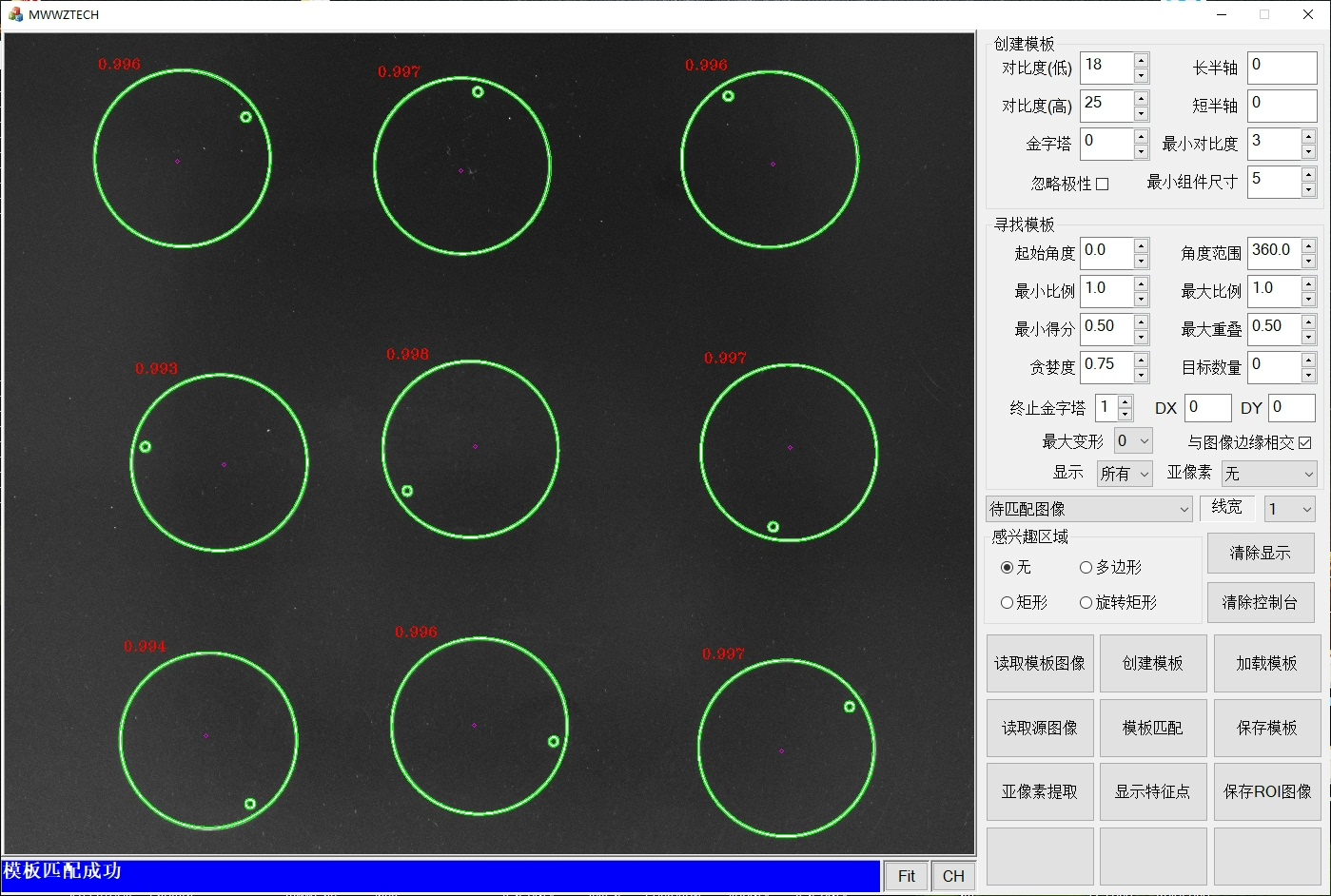
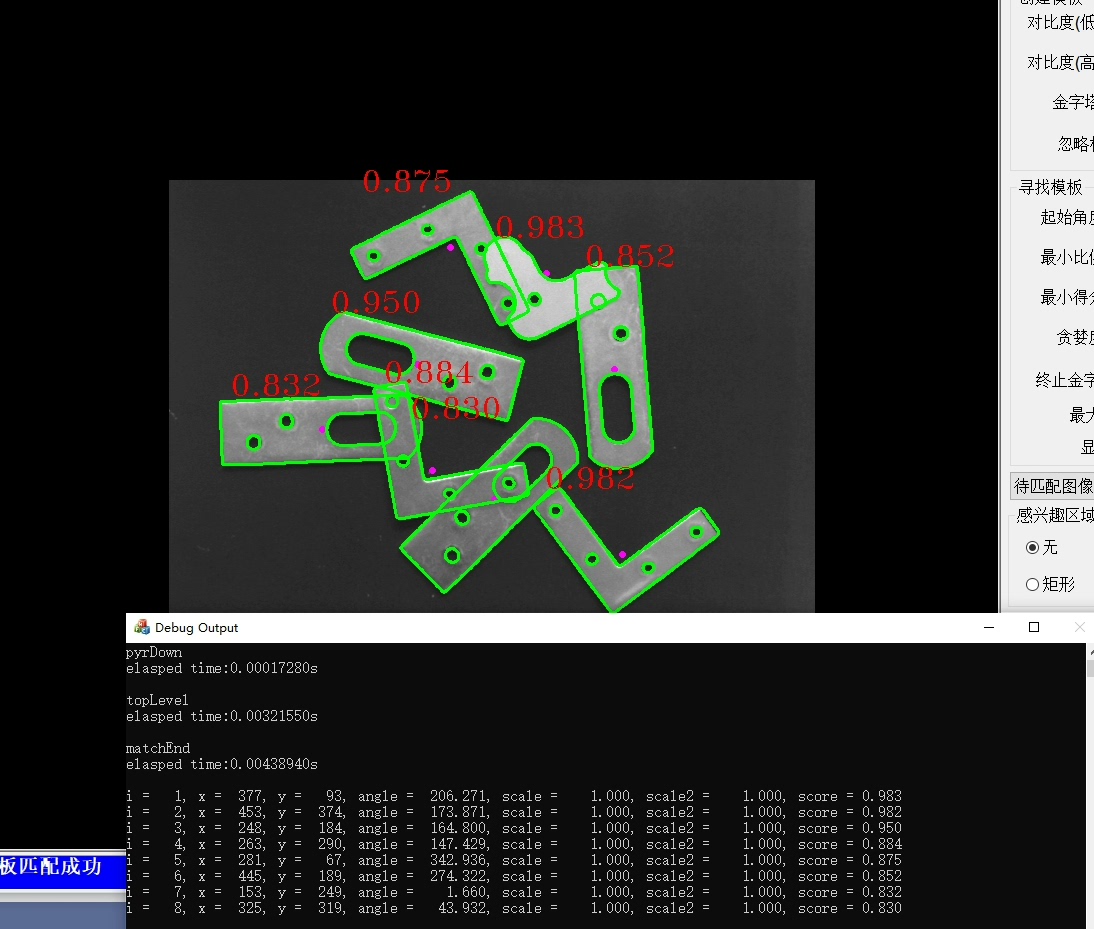
先来点直接的——模板匹配就像玩"大家来找茬"。把Logo图片存为模板,用滑动窗口在视频帧里寻找相似区域。OpenCV的matchTemplate函数用起来比点外卖还简单:
cv::Mat src = cv::imread("drink_frame.jpg");
cv::Mat templ = cv::imread("cola_logo.png");
cv::Mat result;
cv::matchTemplate(src, templ, result, cv::TM_CCOEFF_NORMED);但别急着高兴,这方法在实战中分分钟教你做人。当Logo旋转了15度或者被手指挡住半边时,匹配得分直接崩盘。这时候需要点预处理技巧:转灰度、边缘检测、高斯模糊三连击。就像给图像美颜后再相亲,成功率能提升不少:
// C#版本预处理
Image<Gray, byte> gray = currentFrame.Convert<Gray, byte>();
gray = gray.Canny(100, 50).SmoothGaussian(3);遇到异形Logo更刺激,比如星巴克的塞壬Logo。这时候模板匹配跪了,得上特征点匹配。ORB检测器比SIFT更快,适合实时检测:
vector<KeyPoint> keypoints1, keypoints2;
Mat descriptors1, descriptors2;
Ptr<ORB> orb = ORB::create();
orb->detectAndCompute(img1, noArray(), keypoints1, descriptors1);
// 暴力匹配器上线
BFMatcher matcher(NORM_HAMMING);
vector<DMatch> matches;
matcher.match(descriptors1, descriptors2, matches);但特征点太多会卡成PPT,得加个筛选机制。我常用双向匹配+距离阈值过滤,像淘金一样留下优质匹配点:
// 双向交叉验证
var forwardMatches = matcher.KnnMatch(descriptor1, descriptor2, 2);
var backwardMatches = matcher.KnnMatch(descriptor2, descriptor1, 2);
// 距离比测试
var goodMatches = forwardMatches.Where(m => m[0].Distance < 0.7 * m[1].Distance);说到实战坑点,环境光照变化绝对排前三。某次在窗边测试,下午三点和五点的识别率差30%。解决方案是转HSV色彩空间,或者用直方图均衡化:
Mat hsv;
cvtColor(frame, hsv, COLOR_BGR2HSV);
vector<Mat> channels;
split(hsv, channels);
equalizeHist(channels[2], channels[2]); // 增强亮度通道
merge(channels, hsv);最后来个冷知识:用C++的OpenCV处理200ms每帧,换成C#+EmguCV可能变成300ms。不是语言问题,而是托管代码的GC在作妖,实时系统记得用Native代码+内存池优化。
模板匹配像是精准的狙击枪,特征匹配像霰弹枪——没有绝对的好坏,关键看场景。下次在便利店看到自动识别Logo的机器,说不定里面正跑着类似的代码逻辑呢。



openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)