
FreeRTOS内核(六)定时任务的核心机制
定时器的通用实现逻辑,这是理解 FreeRTOS 的前提:超时时间:比如设置 100ms,就是(记为),当累加到这个值时触发回调;定时器链表:所有定时器通过挂到一个链表中,且链表按从小到大排序。FreeRTOS 为了保证中断的快速退出和提高灵活性,采用了“委托”机制。被唤醒的两种情况:情况1:收到用户操作(启动/停止/修改定时器)的命令消息(来自 xTimerQueue);情况2:阻塞等待超时(无
一、 基础原理
定时器的通用实现逻辑,这是理解 FreeRTOS 的前提:
- 硬件基础:硬件定时器每隔 1ms 产生一次 SysTick 中断(FreeRTOS 的系统节拍中断),中断里会累加一个全局计数值
xTickCount(你笔记里的 “tik com x tik/Count”)。 - 软件定时器结构体:每个软件定时器对应一个结构体,核心成员:
typedef struct tmrTimerControl
{
const char * pcTimerName; /* 定时器名称(仅用于调试)*/
ListItem_t xTimerListItem; /* 定时器链表节点(核心字段)*/
TickType_t xTimerPeriodInTicks; /* 定时器周期(单位:系统节拍 Tick)*/
void * pvTimerID; /* 定时器唯一标识 ID*/
TimerCallbackFunction_t pxCallbackFunction; /* 定时器超时回调函数指针*/
#if ( configUSE_TRACE_FACILITY == 1 )
UBaseType_t uxTimerNumber; /* 定时器追踪编号(仅启用追踪功能时生效)*/
#endif
uint8_t ucStatus; /**< 定时器状态位(8 位位图,存储多个状态标识)
- 包含的核心状态:
1. 内存分配方式(静态分配/动态分配);
2. 定时器激活状态(是否处于运行中);
3. 其他内部管理状态(如是否等待删除) */
} xTIMER;超时时间:比如设置 100ms,就是xTickCount + 100(记为xExpireTime),当xTickCount累加到这个值时触发回调;
定时器链表:所有定时器通过xTimerListItem挂到一个链表中,且链表按xExpireTime从小到大排序。
- 如果不排序,每次中断都要遍历所有定时器判断是否超时;排序后只需要检查链表第一个节点(最早超时的定时器),效率极高。
二、FreeRTOS定时中断与传统RTOS的差异
1 传统做法(直接在中断中处理)
- 流程:Tick 中断发生 -> 遍历定时器链表 -> 发现超时 -> 直接调用回调函数。
- 缺点:
- 如果回调函数执行时间长,会长时间占用中断上下文,导致其他高优先级中断无法响应,破坏系统的实时性。
- 中断上下文中不能调用某些阻塞 API(如信号量、队列接收等),限制了回调函数的功能。
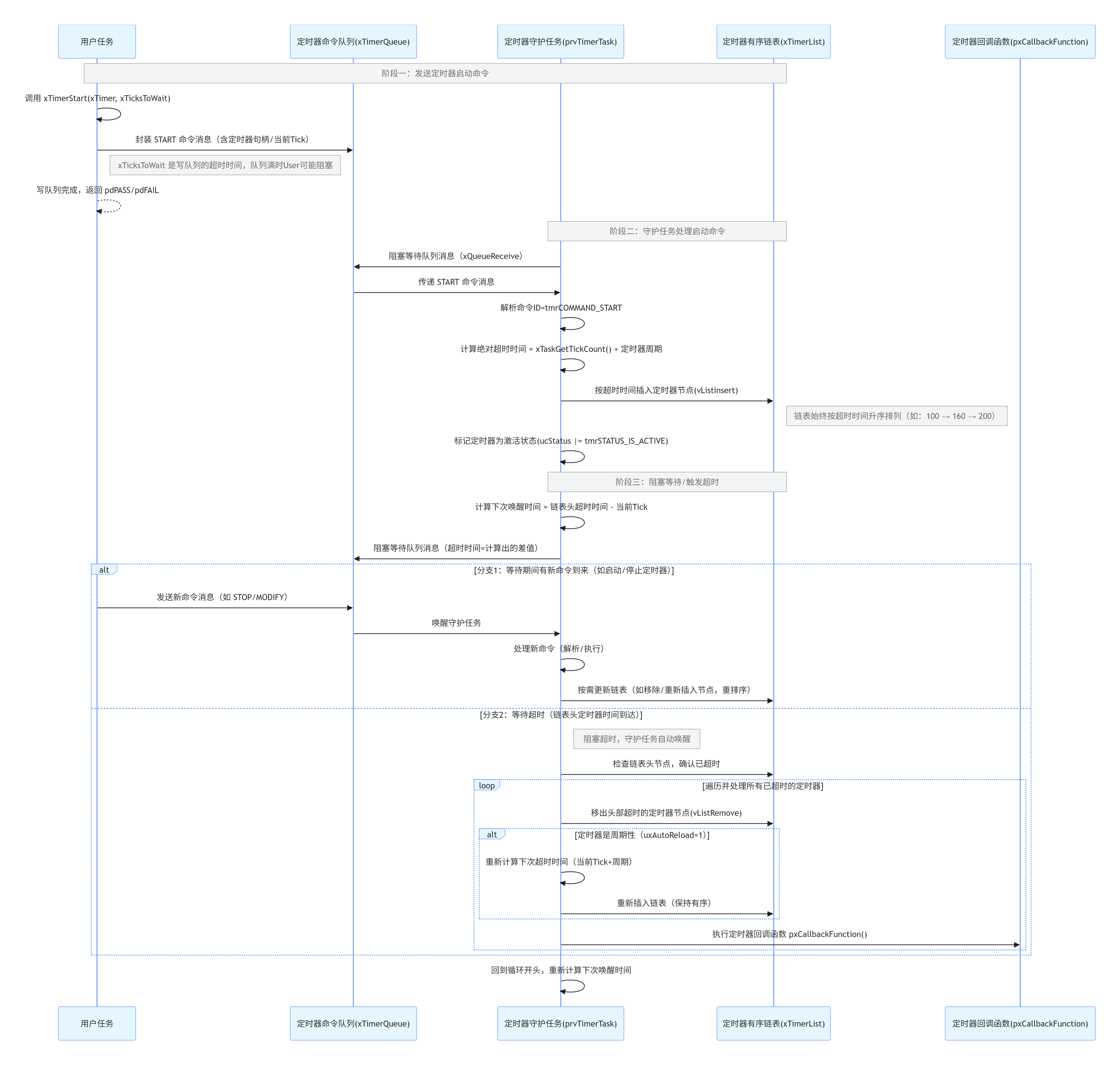
2 FreeRTOS 的做法(守护任务/daemon Task 机制)
FreeRTOS 为了保证中断的快速退出和提高灵活性,采用了“委托”机制。
- 核心组件:
- 定时器命令队列 (
xTimerQueue):用于接收创建、启动、停止、修改周期等命令。 - 定时器守护任务 (
prvTimerTask):一个优先级较高的独立任务,专门负责处理定时器逻辑。
- 定时器命令队列 (
- 工作流程:
- Tick 中断中:仅负责两件事——① 更新全局计数值 xTickCount;② 触发系统任务调度。关键点:Tick 中断不检查定时器链表、不判断定时器是否超时、也不向 xTimerQueue 发送任何消息,中断会快速退出。
- 守护任务中(优先级由
configTIMER_TASK_PRIORITY决定):- 主动计算定时器链表中“下一个最早超时的时间”,然后阻塞等待 xTimerQueue 消息(阻塞超时时间 = 计算出的超时差值);
-
被唤醒的两种情况:
情况1:收到用户操作(启动/停止/修改定时器)的命令消息(来自 xTimerQueue);
情况2:阻塞等待超时(无新命令,且链表头定时器的超时时间已到);
-
若因“阻塞超时”唤醒:主动遍历定时器链表,处理所有超时的定时器,在任务上下文中执行回调函数;
-
若因“收到命令”唤醒:处理命令(如插入/移除定时器链表节点),然后重新计算超时时间,再次阻塞等待。
- 优点:
- 中断极快退出,系统实时性高。
- 回调函数运行在任务上下文中,可以使用所有 FreeRTOS API(包括阻塞调用)。
- 可以通过配置
configTIMER_TASK_PRIORITY灵活控制定时器处理的优先级。
- 缺点:多了队列 / 任务的开销
总结一下就是:
FreeRTOS 定时器设计的核心规则 ——所有对定时器的操作(启动 / 停止 / 删除 / 修改周期)都不是直接生效,而是通过向队列发消息,由守护任务统一处理。
三,定时任务流程
底层函数基本都是适用 xTimerGenericCommand
| 步骤 | 阶段 | 执行者 | 核心动作 | 定时器状态 | 是否在链表中? | 备注 |
|---|---|---|---|---|---|---|
| 1 | 创建 | 用户任务 | xTimerCreate分配内存,初始化结构体 |
未激活 (Inactive) |
❌ 否 | 此时只是个空壳对象 |
| 2 | 发送命令 | 用户任务 | xTimerStart仅发送消息到队列 |
未激活 (Inactive) |
❌ 否 | 关键点: 函数返回时,定时器仍不在链表中! |
| 3 | 处理命令 | 守护任务 | prvProcessReceivedCommands读取队列消息,执行插入操作 |
激活 (Active) |
✅ 是 | 此刻才真正进入有序链表,开始计时 |
| 4 | 运行/触发 | 守护任务 | prvProcessExpiredTimers检查时间,执行回调 |
运行中 | ✅ 是 | 周期性定时器会在此步重新计算时间并重插链表 |
| 5 | 停止 | 用户任务 | xTimerStop发送停止消息到队列 |
未激活 (Inactive) |
❌ 否 (稍后移除) | 同启动,需等守护任务读到消息后才从链表移除 |
1.定时任务启动函数
#define xTimerStart( xTimer, xTicksToWait ) \
xTimerGenericCommand( ( xTimer ), tmrCOMMAND_START, ( xTaskGetTickCount() ), NULL, ( xTicksToWait ) )
可以看到,启动操作不是同步完成的,而是异步的。它只是通过队列发个消息给守护任务说“我要启动”。如果队列满了,调用者可以选择阻塞等待队列有空位。
以下为xTimerGenericCommand的一部分:
判断调用来源:是任务上下文 还是 中断上下文?
if( xCommandID < tmrFIRST_FROM_ISR_COMMAND )
{
// --- 任务上下文 (如 xTimerStart) ---
// 检查调度器是否正在运行
if( xTaskGetSchedulerState() == taskSCHEDULER_RUNNING )
{
// 正常发送:如果队列满,根据 xTicksToWait 决定是否阻塞
xReturn = xQueueSendToBack( xTimerQueue, &xMessage, xTicksToWait );
}
else
{
// 调度器未运行(如在 main 函数刚启动时):不能阻塞,立即发送或失败
xReturn = xQueueSendToBack( xTimerQueue, &xMessage, tmrNO_DELAY );
}
}
else
{
// --- 中断上下文 (如 xTimerStartFromISR) ---
// 使用中断安全的发送函数
xReturn = xQueueSendToBackFromISR( xTimerQueue, &xMessage, pxHigherPriorityTaskWoken );
}2.守护任务
static portTASK_FUNCTION( prvTimerTask, pvParameters )
{
TickType_t xNextExpireTime; // 存储链表中“下一个最早超时的定时器时间”
BaseType_t xListWasEmpty; // 标记定时器链表是否为空
/* Just to avoid compiler warnings. */
( void ) pvParameters; // 屏蔽参数未使用的编译警告(任务参数无意义)
#if ( configUSE_DAEMON_TASK_STARTUP_HOOK == 1 )
{
extern void vApplicationDaemonTaskStartupHook( void );
/* 应用层钩子函数:守护任务启动时执行(可选)
* 用途:开发者可以在守护任务启动后、正式工作前执行初始化逻辑
* 比如初始化定时器相关的硬件/全局变量 */
vApplicationDaemonTaskStartupHook();
}
#endif /* configUSE_DAEMON_TASK_STARTUP_HOOK */
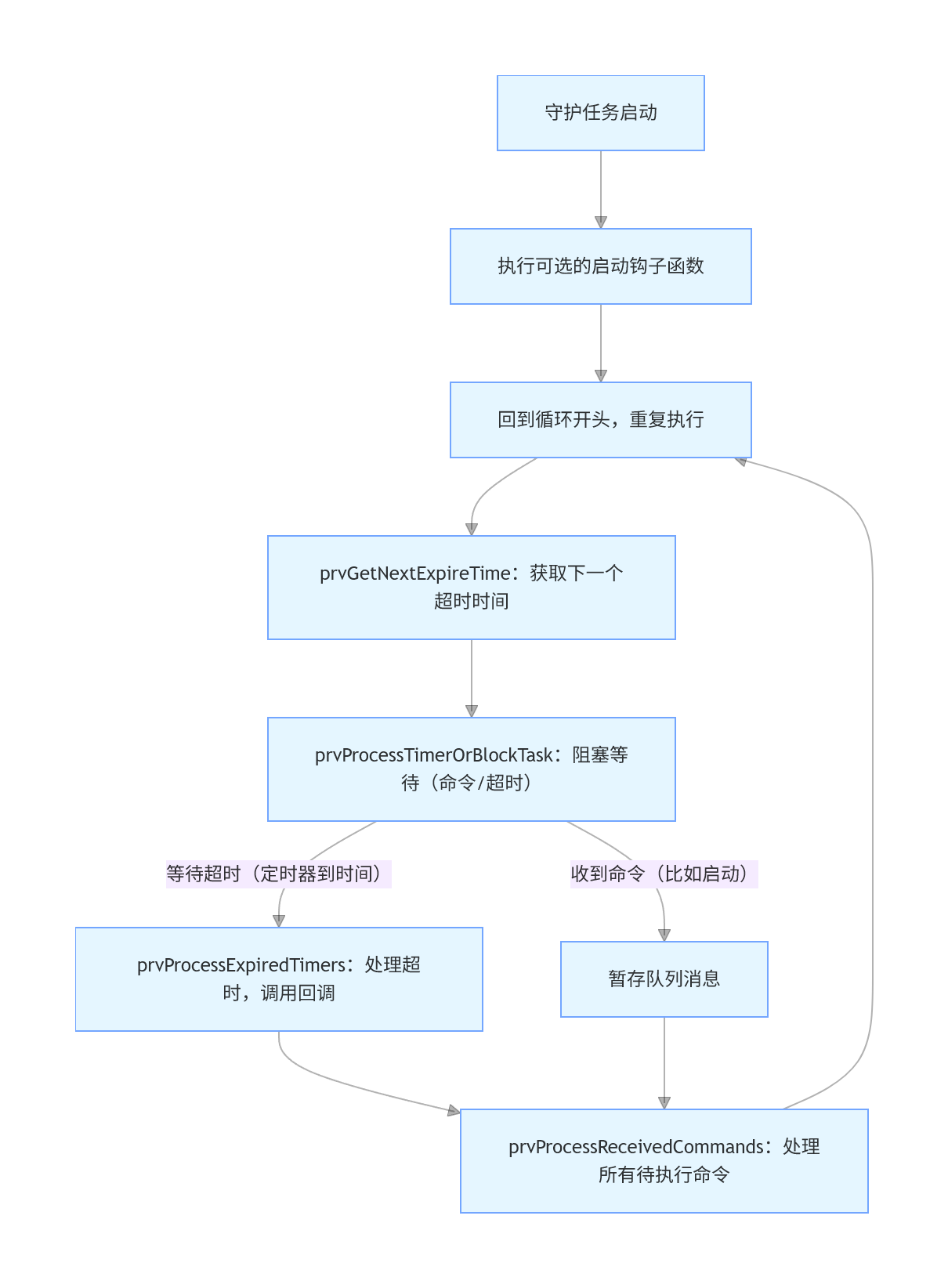
// 死循环:守护任务的核心(任务一旦启动,永远运行)
for( ; ; )
{
/* 步骤1:查询定时器链表,获取关键信息
* 1. 检查定时器链表(xTimerList)是否为空 → 结果存入xListWasEmpty
* 2. 如果链表非空,计算“下一个最早超时的定时器时间” → 存入xNextExpireTime
* (链表已按超时时间排序,只需取第一个节点的超时时间) */
xNextExpireTime = prvGetNextExpireTime( &xListWasEmpty );
/* 步骤2:核心逻辑——阻塞等待/处理超时
* 作用:
* 1. 如果链表为空 → 阻塞等待xTimerQueue的命令(启动/停止等);
* 2. 如果链表非空 → 阻塞等待“xNextExpireTime时间” 或 “xTimerQueue有命令”(二者满足其一就唤醒);
* 3. 如果等待超时(即xNextExpireTime到了)→ 立即处理已超时的定时器(调用回调函数);
* 这就是你之前问的“精华逻辑”:既等命令,又等超时,二选一唤醒 */
prvProcessTimerOrBlockTask( xNextExpireTime, xListWasEmpty );
/* 步骤3:处理命令队列中的所有待执行命令
* 包括:启动定时器(插入链表)、停止定时器(移除链表)、修改周期、删除定时器等
* 你之前问的“启动定时器时插入链表”,就是在这个函数里执行的! */
prvProcessReceivedCommands();
}
}关键数据结构:有序链表
- 存储方式:所有激活的定时器挂载在同一个双向链表 (
xActiveTimerList) 中。 - 排序规则:严格按照绝对超时时间 (
ExpireTime) 从小到大排序。 - 优化效果:
- 链表头永远是最早过期的定时器。
- 检查超时无需遍历全表,只需看头节点 ( O(1)O(1) 复杂度)。
注意注意:prvProcessReceivedCommands中也实现了处理ISR任务通知中的队列消息
四、定时任务总结

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 13
13 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)