
STM32F407微控制器开发实战教程与示例源码
本文还有配套的精品资源,点击获取简介:本教程通过提供STM32F407的示例源码,帮助初学者快速掌握基于ARM Cortex-M4内核的STM32F407微控制器的开发。教程涵盖了微控制器的概述、开发环境搭建、基础实例、中断与DMA、RTOS的使用,以及USB和网络接口的应用等关键主题。通过实践学习,初学者将逐步了解微控制器硬件资源和软件开发流程,为嵌入式系统设计打下坚实...

简介:本教程通过提供STM32F407的示例源码,帮助初学者快速掌握基于ARM Cortex-M4内核的STM32F407微控制器的开发。教程涵盖了微控制器的概述、开发环境搭建、基础实例、中断与DMA、RTOS的使用,以及USB和网络接口的应用等关键主题。通过实践学习,初学者将逐步了解微控制器硬件资源和软件开发流程,为嵌入式系统设计打下坚实基础。 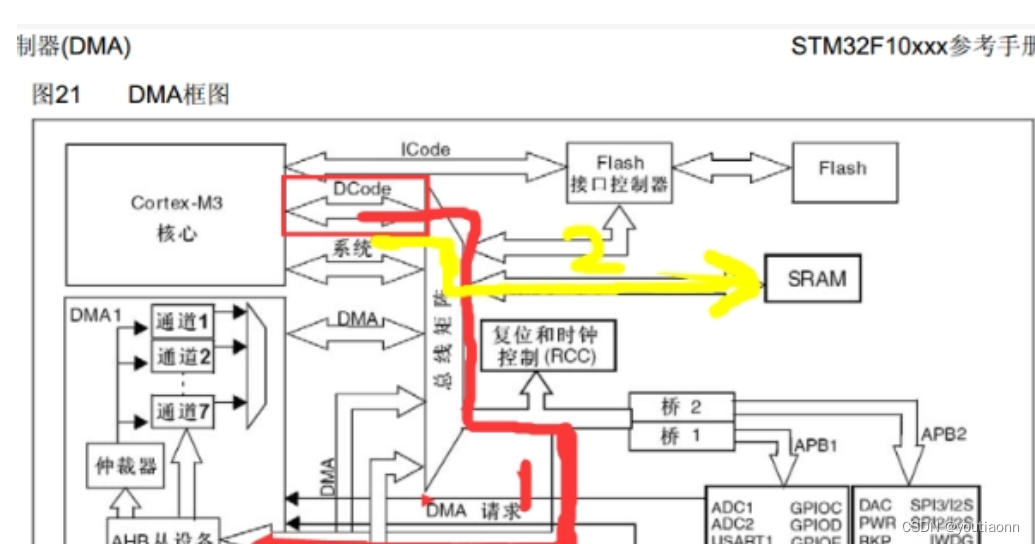
1. STM32F407微控制器概述
1.1 微控制器的简介与应用范围
STM32F407是STMicroelectronics(意法半导体)生产的一款高性能ARM Cortex-M4微控制器,广泛应用于工业控制、汽车电子、医疗设备和消费类产品中。它集成了众多功能,如180MHz的处理器核心、丰富的外设接口和大容量的内存空间,确保了高效且灵活的系统设计。
1.2 核心特性与优势
该芯片的核心特性包括:
- ARM Cortex-M4核心,集成了单精度浮点运算单元(FPU)
- 多达192 KB的RAM以及高达1MB的闪存
- 内置USB OTG、10/100 Ethernet MAC、17个定时器
- 3个12位ADC,2个12位DAC,4个SPI,2个I2C接口
这些特性为开发者提供了处理复杂任务的能力,如实时数据处理、音频处理和视频流传输等,同时其丰富的外设接口极大地方便了硬件扩展和系统集成。
1.3 设计微控制器的创新技术
STM32F407的创新技术体现在其灵活的电源管理、丰富的低功耗模式和高集成度的外设,这些都为设计者提供了更高的设计自由度。比如,它支持多种省电模式,可实现电流消耗从微安到毫安的精确控制。同时,该芯片还能支持高达21个通信接口,允许与多种传感器和通信模块无缝连接,这对于需要高速数据传输的物联网应用尤为重要。
在接下来的章节中,我们将深入了解如何搭建开发环境,并逐步讲解如何利用这些先进特性来开发功能丰富的嵌入式系统。
2. 开发环境搭建与工具使用
2.1 开发环境的选择与安装
2.1.1 安装Keil MDK-ARM
Keil MDK-ARM是由Keil公司开发的一款专门针对ARM处理器的集成开发环境(IDE),它整合了代码编辑、编译、调试等多种功能,是开发ARM微控制器程序的利器。对于STM32F407微控制器而言,Keil MDK-ARM提供了全面的支持。
安装Keil MDK-ARM的步骤如下:
- 下载Keil MDK-ARM的安装程序,访问Keil官方网站获取最新版本。
- 运行安装程序,并遵循安装向导的指引。
- 在安装过程中,需要选择要安装的组件,对于STM32F407开发,需要确保安装了对Cortex-M处理器的支持。
- 完成安装,并启动Keil uVision。
安装完成后,进行环境配置,确保安装路径下包含必要的驱动和库文件,为后续的项目创建和编译做好准备。
2.1.2 安装STM32CubeMX
STM32CubeMX是ST公司提供的图形化配置工具,它能够帮助开发者以图形化界面的方式配置STM32F407的外设和中间件,生成初始化代码,极大地简化了开发流程。安装STM32CubeMX的步骤如下:
- 访问ST官网下载STM32CubeMX安装包。
- 运行下载的安装程序,遵循安装向导的指引完成安装。
- 安装完成后,启动STM32CubeMX,并更新到最新版本。
STM32CubeMX安装成功后,通过其丰富的图形化配置界面,开发者可以直观地配置微控制器的各种参数,并且支持一键生成Keil MDK-ARM的项目框架,大大提高了项目的初始化效率。
2.1.3 配置必要的驱动程序
在使用开发板进行程序下载和调试之前,需要确保安装了正确的驱动程序。对于不同的开发板和调试器,可能需要安装不同类型的驱动程序。通用步骤如下:
- 确定开发板和调试器的型号。
- 下载相应型号的驱动程序安装包。
- 按照驱动程序安装向导完成安装。
- 重启计算机,确保驱动程序生效。
确保驱动程序安装正确后,连接开发板到电脑,检查设备管理器中是否能够正确识别开发板的调试端口(例如ST-Link端口),并进行后续的程序下载和调试工作。
2.2 工具链的使用方法
2.2.1 Keil的基本操作
Keil MDK-ARM的基本操作包括项目创建、代码编写、编译、下载和调试等步骤。以下是操作Keil MDK-ARM进行STM32F407开发的基本流程:
- 打开Keil uVision,选择“Project”菜单下的“New uVision Project...”来创建新项目。
- 在弹出的对话框中选择项目保存的位置,并为项目命名。
- 在“Select Device for Target”对话框中选择对应的微控制器型号,此处为STM32F407。
- 创建项目后,可以通过“Manage Project Items”添加源文件(.c/.cpp/.s)、头文件(.h/.hpp)等。
- 编写代码完成后,通过“Project”菜单下的“Build Target”进行编译构建。
- 构建无误后,可以通过“Flash”菜单下的“Download”下载程序到开发板。
以上步骤是使用Keil MDK-ARM进行STM32F407开发的基础流程,接下来是通过一个简单的LED闪烁程序测试来验证开发环境搭建是否成功。
2.3 硬件开发板的准备与配置
2.3.1 选择合适的开发板
在开始项目开发之前,选择一款合适的开发板至关重要。对于STM32F407微控制器而言,市场上有多种开发板可供选择,比如STM32F4 Discovery、Nucleo-F407等。选择开发板时需要考虑以下因素:
- 是否有丰富的外设接口。
- 是否包含必要的调试接口(如ST-Link)。
- 是否有配套的开发文档和示例项目。
确保开发板的功能满足开发需求后,按照开发板说明书进行硬件连接。
2.3.2 连接开发环境与硬件
完成开发板的选择和购买后,下一步是将开发板与电脑连接起来。一般来说,STM32系列的开发板会配备一个USB接口用于连接电脑,它既可以用于供电也可以用于数据传输。连接步骤如下:
- 找到开发板上的USB接口。
- 使用USB数据线连接开发板与电脑。
- 开发板连接成功后,系统可能会自动识别新的硬件,并开始安装驱动程序。
2.3.3 简单的LED闪烁程序测试
为了验证开发环境与硬件的配置是否正确,可以进行一个简单的LED闪烁测试程序。以下是创建和运行LED闪烁测试程序的步骤:
- 在Keil中创建一个新的项目,并为STM32F407选择正确的设备型号。
- 添加必要的源文件和头文件。
- 编写代码使某个GPIO管脚输出高低电平,从而控制连接的LED灯的亮灭。
- 编译并下载程序到开发板。
- 观察LED灯是否按照预期闪烁。
下面提供一个简单的LED闪烁代码示例:
#include "stm32f4xx.h"
int main(void)
{
// 1. 初始化GPIO管脚
RCC->AHB1ENR |= RCC_AHB1ENR_GPIODEN; // 使能GPIOD时钟
GPIOD->MODER &= ~(GPIO_MODER_MODER13); // 设置PD13为输出模式
GPIOD->MODER |= (GPIO_MODER_MODER13_0);
while(1)
{
// 2. 切换LED状态
GPIOD->ODR ^= GPIO_ODR_ODR_13; // 切换PD13的高低电平
for(volatile int i = 0; i < 1000000; i++); // 简单延时
}
}
通过以上步骤和代码,可以验证开发环境是否搭建成功,并对STM32F407微控制器的基本操作有所了解。接下来的章节中,我们将继续深入探讨STM32F407的各种外设和功能。
3. 基础实例演示:GPIO控制、定时器应用、串行通信、SPI/I2C通信、ADC/DAC转换
3.1 GPIO控制基础
GPIO(通用输入输出)是微控制器与外部世界交互的最基础接口。理解GPIO的工作模式和特性是学习STM32F407的首要任务。
3.1.1 GPIO的工作模式和特性
STM32F407的GPIO口功能强大,支持浮空输入、上拉/下拉输入、模拟输入、开漏输出、推挽输出、复用功能和复用开漏输出等模式。以下是GPIO的主要特性:
- 速度等级:每个GPIO口都有三种速度等级:2 MHz、25 MHz、50 MHz。
- 输出类型:支持推挽输出和开漏输出两种类型。推挽输出适用于大多数应用,而开漏输出可以用来连接多个输出设备。
- 输入特性:输入可配置为上拉/下拉,也可以浮空,或者用作模拟输入。
graph LR
A[STM32F407 GPIO口] --> B[输入模式]
A --> C[输出模式]
B --> D1[浮空输入]
B --> D2[上拉输入]
B --> D3[下拉输入]
B --> D4[模拟输入]
C --> E1[推挽输出]
C --> E2[开漏输出]
C --> E3[复用功能输出]
C --> E4[复用开漏输出]
3.1.2 简单的输入输出操作实例
要操作GPIO,通常需要使用STM32CubeMX生成初始化代码,然后在Keil中编写业务逻辑。下面是一个简单的LED闪烁代码示例:
// 假设LED连接在GPIOA的第5个引脚
#define LED_PIN GPIO_PIN_5
#define LED_GPIO_PORT GPIOA
// 初始化GPIO为输出模式
void LED_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA时钟
GPIO_InitStruct.Pin = LED_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LED_GPIO_PORT, &GPIO_InitStruct);
}
// 控制LED的开关
void LED_Control(uint8_t state) {
HAL_GPIO_WritePin(LED_GPIO_PORT, LED_PIN, state ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
int main(void) {
HAL_Init(); // 初始化HAL库
LED_Init(); // 初始化LED
while (1) {
LED_Control(1); // 打开LED
HAL_Delay(500); // 延时500ms
LED_Control(0); // 关闭LED
HAL_Delay(500); // 延时500ms
}
}
在此代码中, LED_Init 函数用于初始化LED所连接的GPIO端口, LED_Control 函数用于控制LED的开关状态。在主循环中,LED每隔500ms就会闪烁一次。
3.2 定时器应用技巧
3.2.1 定时器的工作原理
STM32F407的定时器具有多种工作模式,包括定时器/计数器功能、输入捕获功能、输出比较功能以及脉冲宽度调制(PWM)模式等。定时器广泛应用于生成精确的时间延迟和测量外部事件的时间间隔。
3.2.2 创建精确的定时和计数应用
要创建精确的定时和计数应用,首先需要配置定时器的预分频器(Prescaler)和自动重装载寄存器(Auto-reload register),来确定定时器的计数频率和溢出时间。以下是一个使用定时器产生准确1秒中断的代码示例:
#define TIMера USE_TIMERA
#define TIMера_CLK_ENABLE __HAL_RCC_TIMERA_CLK_ENABLE
#define TIMERAHandlers TIMERA_HANDLER
#define TIMERAInit TIMERA_INIT
void TIMERA_Config(void) {
TIM_HandleTypeDef htimera;
TIMERA_CLK_ENABLE(); // 使能定时器时钟
TIMERAInit(&htimera); // 初始化定时器
// 计算预分频器和周期值
uint32_t prescaler = (uint32_t)((SystemCoreClock / 2) / 1000000) - 1;
uint32_t period = 1000000 / 1 - 1;
htimera.Init.Prescaler = prescaler;
htimera.Init.Period = period;
htimera.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htimera.Init.CounterMode = TIM_COUNTERMODE_UP;
HAL_TIM_Base_Init(&htimera);
HAL_NVIC_SetPriority(TIMERA_IRQn, 0, 0); // 设置中断优先级
HAL_NVIC_EnableIRQ(TIMERA_IRQn); // 使能中断
HAL_TIM_Base_Start_IT(&htimera); // 开启定时器中断
}
void TIMERAHandlers(void) {
HAL_TIM_IRQHandler(&htimera);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIMERA) {
// 1秒钟到达的处理逻辑
}
}
在该代码段中,我们首先使能了定时器的时钟,并对定时器进行了基本的初始化配置。接着,我们计算了适当的预分频值和周期值,以得到1秒钟的定时中断。最后,我们在定时器中断回调函数中处理1秒钟到达的逻辑。
通过以上两个实例,我们可以掌握GPIO控制和定时器应用的基础,这对于进一步学习STM32F407提供了坚实的基础。接下来,我们将介绍串行通信技术,这是嵌入式系统中不可或缺的部分。
4. 中断与DMA操作
4.1 中断系统的基本概念
4.1.1 中断的分类和优先级
中断系统是微控制器中不可或缺的组成部分,它允许微控制器响应紧急事件,暂时挂起当前的任务,去处理优先级更高的任务,然后再恢复到先前的执行状态。STM32F407支持多种中断源,包括外部中断、定时器中断、串行通信中断等,可以配置不同的中断优先级,确保系统按照预定的优先顺序响应。
中断可以分为两大类:硬件中断和软件中断。硬件中断通常由外部事件触发,例如按钮按下、定时器溢出等;软件中断则由执行特定指令引起,通常用于调用操作系统的特定服务。
在STM32F407中,中断优先级的配置和管理非常灵活,支持多达256个不同的优先级,其中16个为主优先级,每个主优先级下又可以设置16个子优先级。设置中断优先级的实质是在系统中为每个中断源分配一个优先级寄存器(IPR)。当中断发生时,中断优先级寄存器中的值决定着中断被处理的顺序。
4.1.2 实现外部中断的流程
实现外部中断需要几个步骤,包括配置引脚为输入模式、设置中断触发方式、配置中断优先级,最后使能中断。
首先,需要在NVIC(嵌套向量中断控制器)中启用中断,并为中断指定优先级。之后,配置GPIO引脚为输入模式,并在EXTI(外部中断控制器)中设置该引脚的中断触发方式(上升沿触发、下降沿触发、上升/下降沿触发或高/低电平触发)。
示例代码如下:
// 使能GPIO和EXTI时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOx, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
// 配置GPIO引脚为输入模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_x;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOx, &GPIO_InitStructure);
// 将GPIO引脚配置为中断输入
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOx, EXTI_PinSourcex);
// 配置中断触发方式和使能中断
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Linex;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; // 或者EXTI_Trigger_Falling, EXTI_Trigger_Rising_Falling
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
// 配置中断优先级
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTIx_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01; // 主优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; // 子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
在上述代码中, GPIOx 和 GPIO_Pin_x 应当被替换为相应的引脚配置。配置完成后,编写中断服务函数来响应中断事件。
4.2 中断服务程序的编写
4.2.1 编写高效的中断处理函数
编写高效的中断服务函数是保证系统稳定运行的关键。高效的中断服务函数应尽可能简短和快速,仅做必要的处理,例如,设置标志位或释放信号量等。对于复杂的工作,应该通过信号量或消息队列的方式,让主程序在合适的时间执行。
例如,对于一个按钮按下的事件,中断服务函数可以仅仅是这样的:
void EXTIx_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Linex) != RESET)
{
// 做必要的处理,例如设置一个事件标志
EventFlag = 1;
// 清除中断标志位
EXTI_ClearITPendingBit(EXTI_Linex);
}
}
4.2.2 中断与低功耗模式的结合使用
为了节能,STM32F407支持多种低功耗模式。当中断发生时,系统可以从低功耗模式中唤醒。为了实现这一点,需要在配置中断时选择唤醒事件,或者在中断服务函数中根据需要将微控制器从低功耗模式唤醒。
代码示例如下:
// 使能睡眠模式下中断能唤醒系统
SCB->SCR |= SCB_SCR_SEVONPEND_Msk;
// 确保中断优先级高于睡眠模式允许的最低优先级
NVIC_SetPriority(SysTick_IRQn, 0x00); // SysTick作为低功耗模式唤醒源
// 进入低功耗模式
PWR_EnterSTOPMode(PWR_Regulator_ON, PWR_STOPEntry_WFI);
在上述代码中, PWR_EnterSTOPMode 函数用于进入低功耗模式, WFI (Wait For Interrupt)指令会等待中断发生来唤醒微控制器。根据实际应用,可以将低功耗模式和中断处理结合起来,达到既省电又响应快速的效果。
4.3 DMA传输技术的应用
4.3.1 DMA的工作机制
DMA(直接内存访问)技术允许外部设备直接访问微控制器的内存,无需CPU介入。这样一来,数据可以快速地在内存和外设之间传输,极大提高了数据处理的效率,尤其适合大量数据的传输。
STM32F407的DMA控制器支持多种传输模式,例如内存到内存、内存到外设和外设到内存。每个通道可以配置为不同的传输方向和优先级,并且可以触发中断。
4.3.2 利用DMA优化数据传输
利用DMA进行数据传输时,需要配置DMA通道,设置源地址、目标地址和传输数据量等参数,然后启动DMA传输。当传输完成时,可以通过DMA中断来处理数据传输完成后的事务。
示例代码如下:
// 使能DMA时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMAx, ENABLE);
// 配置DMA传输
DMA_InitTypeDef DMA_InitStructure;
DMA_InitStructure.DMA_Channel = DMA_Channel_x;
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)peripheral_address;
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)memory_address;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory; // 或者DMA_DIR_MemoryToPeripheral
DMA_InitStructure.DMA_BufferSize = buffer_size;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Enable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word; // 或者HalfWord, Byte
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Word; // 或者HalfWord, Byte
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;
DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_HalfFull;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(DMAy_Streamx, &DMA_InitStructure);
// 使能DMA传输完成中断
DMA_ITConfig(DMAy_Streamx, DMA_IT_TC, ENABLE);
// 使能DMA流
DMA_Cmd(DMAy_Streamx, ENABLE);
// 在中断服务函数中处理DMA传输完成事件
void DMAy_Streamx_IRQHandler(void)
{
if(DMA_GetITStatus(DMAy_Streamx, DMA_IT_TCIF))
{
// 处理DMA传输完成事件
DMA_ClearITPendingBit(DMAy_Streamx, DMA_IT_TCIF);
// 可以在这里关闭DMA或外设,或者执行其他操作
}
}
在上述代码中,DMA相关的寄存器和参数需要根据实际的硬件环境来配置,例如DMA_Channel_x和DMAy_Streamx等。通过合理配置DMA传输,可以显著降低CPU的负担,尤其是在数据吞吐量大的应用场景中,能够提高系统的整体性能。
4.4 小结
在本章节中,我们深入探讨了中断与DMA操作的相关概念和应用。通过上述内容,您应该对STM32F407的中断系统有了更深刻的理解,学会了如何配置和使用中断,以及如何编写高效的中断服务函数。此外,我们也介绍了如何利用DMA进行高效的数据传输,以及如何将中断与低功耗模式结合起来使用。掌握这些知识将帮助您构建更加高效和响应迅速的嵌入式应用。
5. 实时操作系统(RTOS)概念与应用
随着微控制器应用的复杂性日益增长,实时操作系统(RTOS)已经成为现代嵌入式开发中不可或缺的组成部分。RTOS提供了多任务管理和调度机制,以实现更加高效和可靠的任务执行。本章将探讨RTOS的基本理论知识,并演示其在STM32F407微控制器上的应用。
5.1 RTOS的基本理论知识
实时操作系统(RTOS)为实时应用提供了管理多个并发执行任务的能力,它是嵌入式系统设计中的关键组成部分,尤其是对于那些对时间响应有严格要求的应用。
5.1.1 实时操作系统的核心概念
RTOS的核心是能够保证任务在指定的时间内响应。它具有任务管理、时间管理、同步机制和通信机制。任务管理负责任务的创建、删除、挂起和恢复等操作;时间管理则确保任务按照预定的时间执行;同步机制防止任务之间的冲突;通信机制则允许任务间共享数据或信息。
5.1.2 任务管理与调度机制
任务管理涉及任务状态的管理,包括就绪、运行、阻塞和挂起等状态。调度机制决定了哪一个任务被赋予处理器时间片执行。在RTOS中,调度器通常基于优先级的抢占式调度或时间片轮转调度。
5.2 RTOS在STM32F407上的实现
STM32F407作为一款高性能的ARM Cortex-M4微控制器,它能够很好地支持RTOS。下面是将RTOS应用于STM32F407的具体步骤。
5.2.1 移植和配置FreeRTOS
FreeRTOS是一个流行的开源RTOS,广泛应用于各种微控制器和处理器平台。首先,我们需要获取FreeRTOS的源代码,并将其移植到STM32F407上。这通常涉及到设置硬件抽象层(HAL)和针对STM32的特定驱动代码。
// FreeRTOSConfig.h 示例代码片段
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/* Kernel include files. */
#include "stm32f4xx.h"
// 其他必要的FreeRTOS核心文件和配置...
/* The following lines can be used to modify the default RTOS kernel settings. */
#define configUSE_PREEMPTION 1 // 启用抢占式调度
#define configUSE_IDLE_HOOK 1 // 启用空闲任务钩子
#define configUSE_TICKLESS_IDLE 0 // 禁用无时钟空闲模式
// 其他配置参数...
#endif /* FREERTOS_CONFIG_H */
5.2.2 创建和管理任务
在配置完RTOS后,我们便可以创建和管理任务。在FreeRTOS中,任务是通过 xTaskCreate 函数创建的,而任务管理则通过 vTaskDelete 、 vTaskSuspend 和 vTaskResume 等函数进行。
void vTaskFunction(void *pvParameters)
{
for(;;)
{
// 执行任务相关的代码...
}
}
int main(void)
{
// 初始化硬件和RTOS...
xTaskCreate(vTaskFunction, "Task 1", 128, NULL, 1, NULL);
xTaskCreate(vTaskFunction, "Task 2", 128, NULL, 1, NULL);
// 启动调度器
vTaskStartScheduler();
// 如果调度器未能启动,则进入死循环
for(;;);
}
5.3 应用实例:多任务编程实践
设计一个多任务应用方案,我们可以通过实际编码来加深对RTOS在STM32F407上应用的理解。
5.3.1 设计一个多任务应用方案
假设我们需要在一个STM32F407系统上执行两个任务:一个用于读取ADC值并更新到一个缓冲区,另一个负责将缓冲区内的数据通过串行通信发送出去。
5.3.2 实现任务间通信与同步
任务间的通信可以通过队列、信号量等机制来实现。在本例中,我们使用队列来同步ADC任务和串行通信任务。
// ADC任务示例代码
void vADCTask(void *pvParameters)
{
QueueHandle_t xQueue;
uint16_t adcValue;
xQueue = xQueueCreate(10, sizeof(uint16_t));
while(1)
{
// 读取ADC值
adcValue = readADC();
// 将ADC值发送到队列
xQueueSend(xQueue, &adcValue, portMAX_DELAY);
}
}
// 串行通信任务示例代码
void vSerialTask(void *pvParameters)
{
QueueHandle_t xQueue;
uint16_t adcValue;
xQueue = xQueueCreate(10, sizeof(uint16_t));
while(1)
{
// 等待队列中的ADC值
if (xQueueReceive(xQueue, &adcValue, portMAX_DELAY) == pdTRUE)
{
// 发送ADC值通过串行端口
sendOverSerial(adcValue);
}
}
}
通过上述章节,我们详细探讨了RTOS的基本理论知识,并结合STM32F407的硬件特性,演示了如何在该平台上实现RTOS的基本功能。通过实际的编程案例,我们可以看到RTOS能够有效地管理多个并发任务,确保系统资源的合理分配和高效使用。这种多任务编程模型是现代嵌入式系统设计的核心,它提供了应对复杂应用需求的灵活性和可扩展性。在下一章节,我们将深入了解STM32F407的USB接口应用。
简介:本教程通过提供STM32F407的示例源码,帮助初学者快速掌握基于ARM Cortex-M4内核的STM32F407微控制器的开发。教程涵盖了微控制器的概述、开发环境搭建、基础实例、中断与DMA、RTOS的使用,以及USB和网络接口的应用等关键主题。通过实践学习,初学者将逐步了解微控制器硬件资源和软件开发流程,为嵌入式系统设计打下坚实基础。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 26
26 0
0- 0



 已为社区贡献85条内容
已为社区贡献85条内容

所有评论(0)