
探索某米扫地机STM32端代码,解锁宝藏学习资源
软件驱动更是丰富多样,有IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、
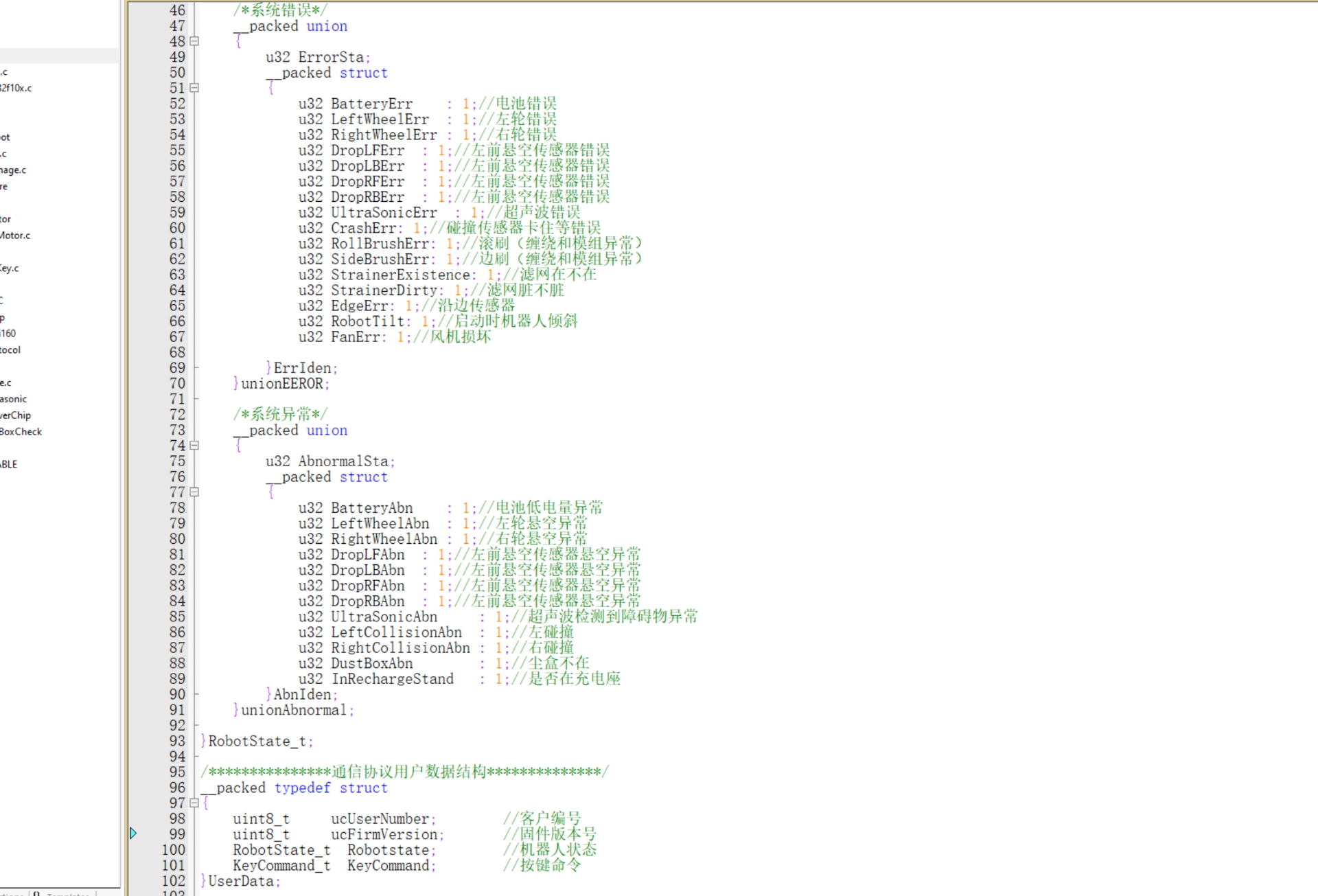
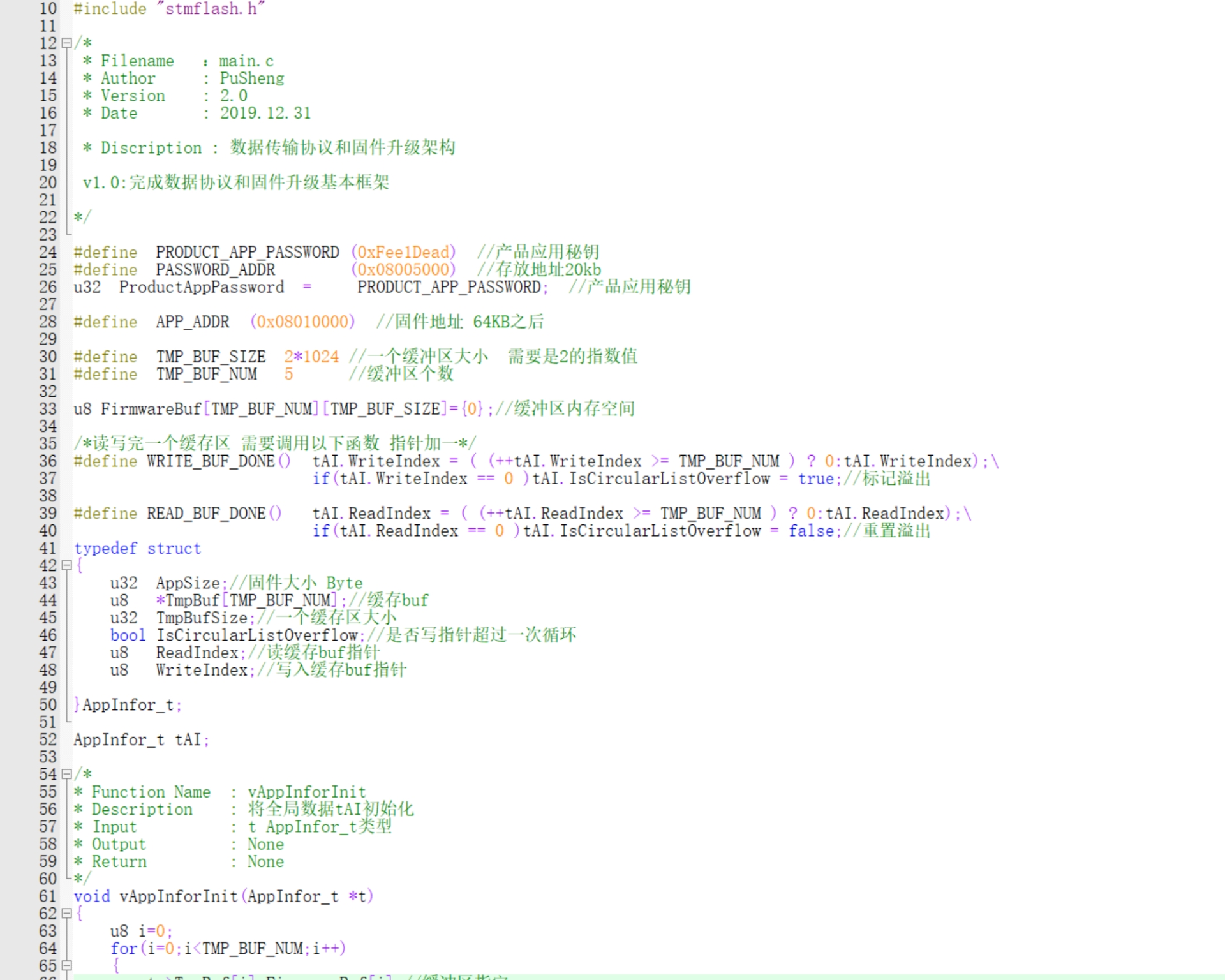
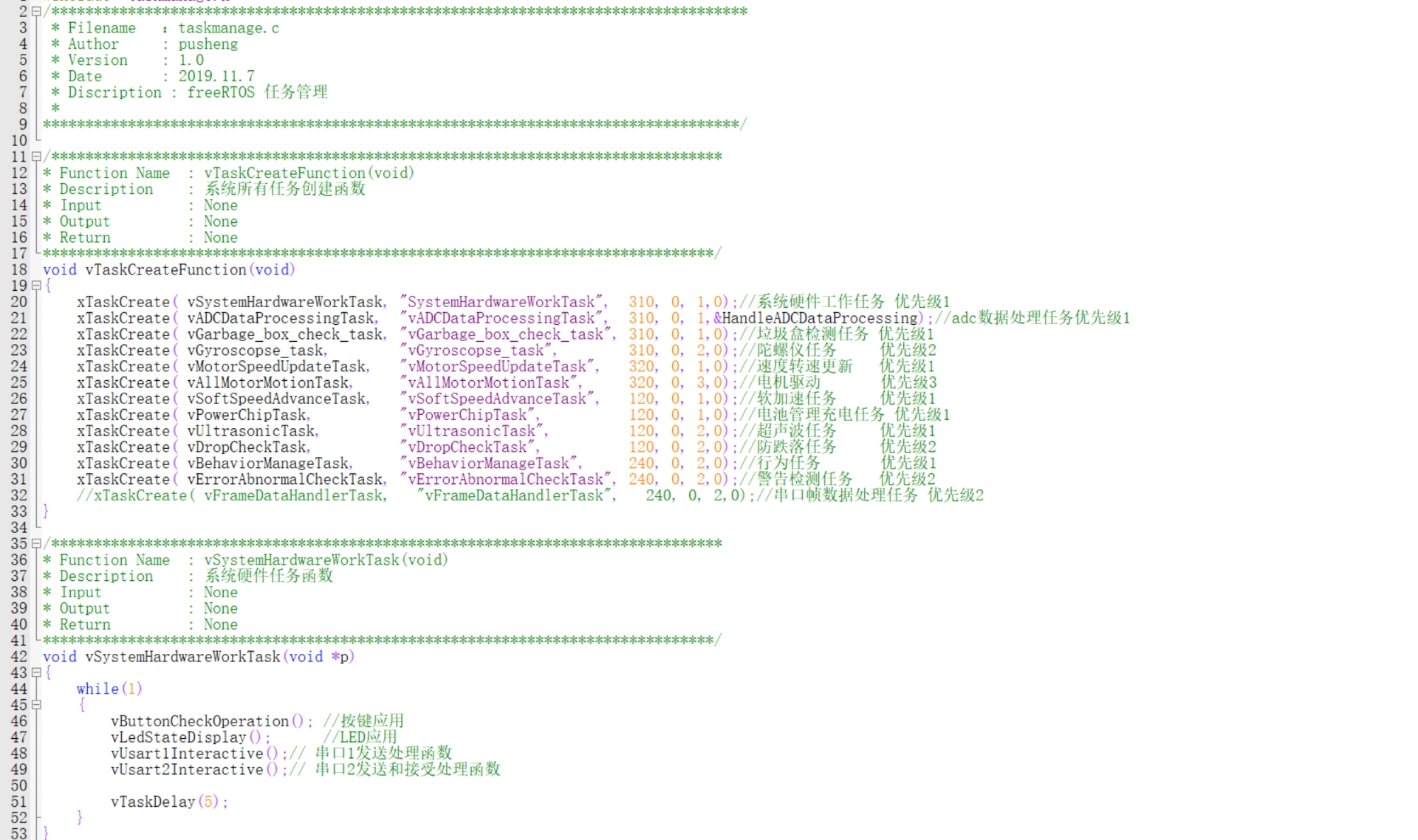
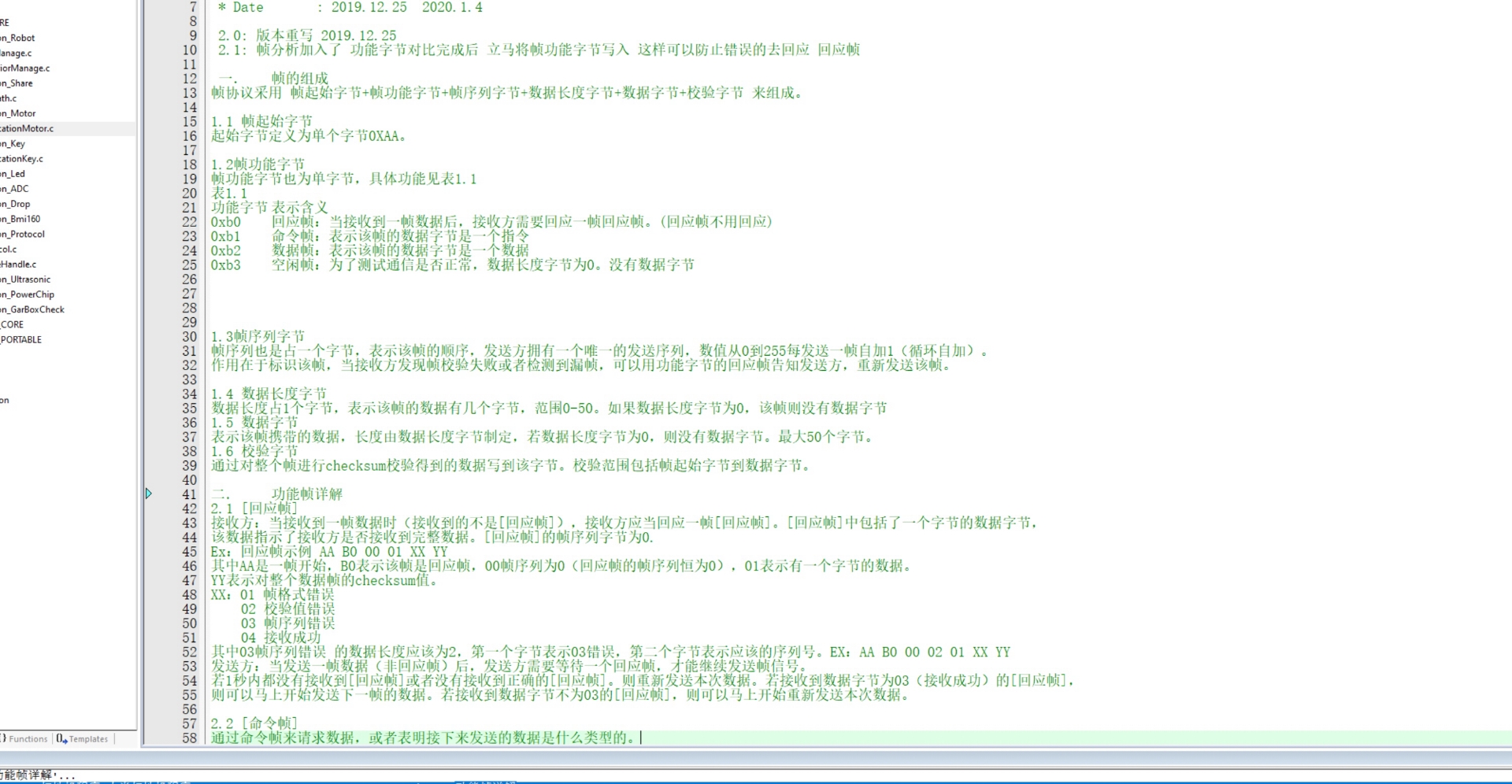
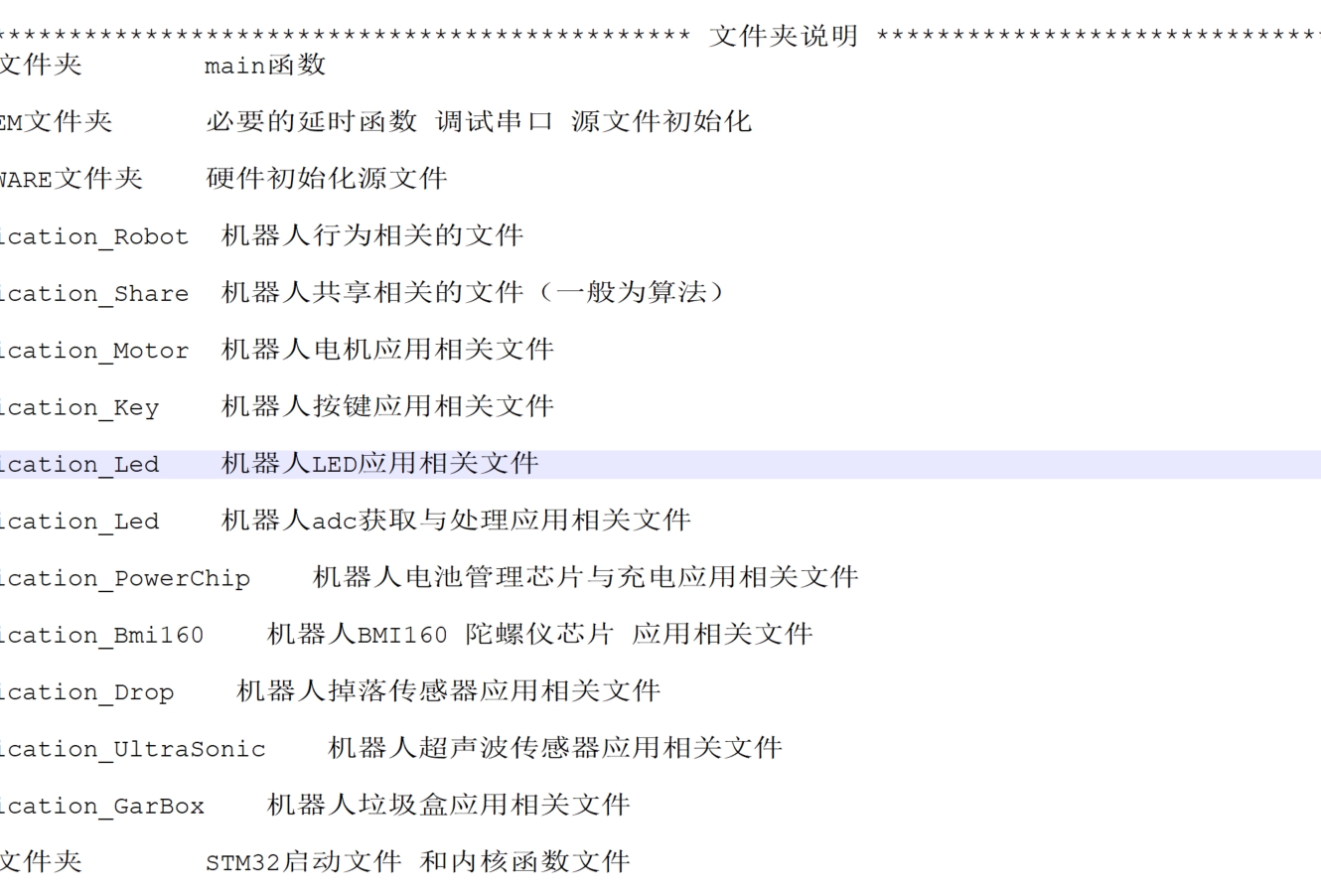
某米扫地机。 大厂程序源码。 STM32端代码能实现延边避障防跌 落充电等功能 适合需要学习项目与代码规范的工程师 硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。 软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。 代码注释清晰、代码规范好、每个函数必有输入输出范围参数解释。
最近发现了超棒的某米扫地机STM32端代码,必须来和大家分享一下!这可是大厂程序源码,含金量超高。
它能实现延边避障、防跌落、充电等一系列实用功能。对于咱们这些需要学习项目与代码规范的工程师来说,简直就是福音。
硬件驱动方面涵盖了陀螺仪姿态传感器bmi160、电源管理bq24733等。就拿陀螺仪姿态传感器bmi160来说,它能精准感知扫地机的姿态变化,为实现各种避障动作提供关键数据支持。
某米扫地机。 大厂程序源码。 STM32端代码能实现延边避障防跌 落充电等功能 适合需要学习项目与代码规范的工程师 硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。 软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。 代码注释清晰、代码规范好、每个函数必有输入输出范围参数解释。
软件驱动更是丰富多样,有IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。这里简单说下IIC,它是一种常用的通信协议,在代码里用于设备间的数据传输,比如传感器和主控芯片之间的数据交互。
重点表扬一下这份代码的注释,清晰得不得了!每个函数都必有输入输出范围参数解释。就像这样一个简单的函数示例:
// 计算扫地机移动距离的函数
int calculateDistance(int startPos, int endPos) {
// startPos是起始位置,endPos是结束位置
return endPos - startPos;
}从这个函数就能很清楚看到输入参数是起始位置和结束位置,输出就是计算出的距离差值。代码规范也很好,看着赏心悦目,学起来超轻松。
有了这份代码,咱们学习项目和代码规范就有了很好的参考范例,赶紧一起研究起来吧!

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)