
STC90C52单片机实现84种幻彩效果编程应用
STC90C52单片机是STC系列单片机中的一种,广泛应用于各种嵌入式系统和智能设备中。它拥有丰富的功能和强大的性能,使其成为工程师们在开发新产品时的首选。无线通信技术在远程控制LED显示系统中起到了关键作用。常用的无线通信技术包括蓝牙、Wi-Fi、ZigBee等。在选择无线通信技术时,需要考虑传输距离、数据传输速率、功耗、成本等因素。

简介:本项目基于STC公司优化的STC90C52单片机,设计实现84种不同的色彩变化效果,为LED灯或显示设备增添丰富视觉表现力。通过编程实现渐变、跳变、流水灯和彗星拖尾等多种模式,每种模式具有不同的速度、颜色组合和动态效果。STC90C52单片机丰富的I/O端口与内部定时器和中断系统,使得控制LED灯阵列和实现各种动画效果变得简单。此外,该项目还可能集成了RF6B无线模块,支持远程控制幻彩模式的选择或参数调整。 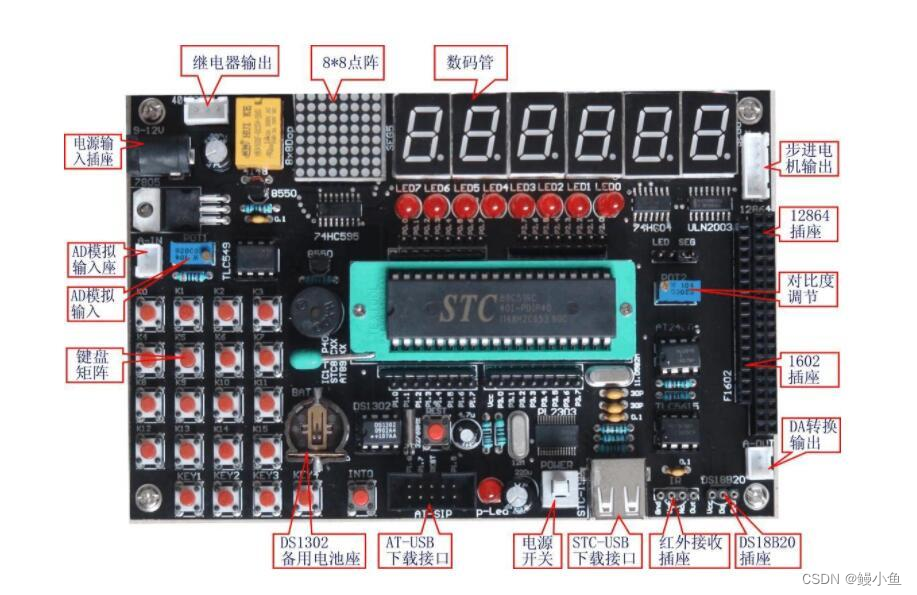
1. STC90C52单片机介绍
STC90C52单片机是STC系列单片机中的一种,广泛应用于各种嵌入式系统和智能设备中。它拥有丰富的功能和强大的性能,使其成为工程师们在开发新产品时的首选。
1.1 STC90C52单片机特点
STC90C52单片机采用8位微控制器架构,内部集成了高速Flash存储器,能存储大量程序代码,并且具有低功耗、高性能的特点。此外,STC90C52单片机还具有丰富的I/O端口,可以方便地与其他设备进行数据交换,以及128字节的RAM和定时器/计数器等资源。
1.2 STC90C52单片机应用
STC90C52单片机在各种领域都有广泛的应用,包括家用电器、工业控制、通信设备、汽车电子等。它不仅可以用于控制LED显示屏,也可以用于控制电机、传感器等设备,是实现各种智能控制系统的理想选择。
在接下来的章节中,我们将详细介绍如何使用STC90C52单片机实现84种色彩变化模式,并深入探讨其背后的理论基础和编程实践。
2. 84种色彩变化模式实现
2.1 色彩变化模式的理论基础
2.1.1 色彩学基础与RGB颜色模型
色彩学是研究色彩的产生、感知、属性及色彩的科学表现的学科。在电子显示系统中,色彩通常由红、绿、蓝(RGB)三个颜色通道组合而成。RGB颜色模型是一种加色模型,它将红色、绿色和蓝色光以不同的强度混合起来,以产生其他颜色。这种模型广泛应用于屏幕显示设备。
在RGB颜色模型中,每种颜色都可以用一个0到255的数值范围来表示其亮度。因此,每个颜色通道可以独立变化来产生丰富的色彩。例如,纯红色可以表示为RGB(255,0,0),而白色是RGB(255,255,255),黑色是RGB(0,0,0)。通过混合不同的颜色值,可以创造出超过1600万种色彩。
2.1.2 色彩变化模式的算法设计
色彩变化模式的算法设计需要考虑如何控制RGB三个颜色通道的亮度值来实现所需的色彩效果。一个基本的色彩变化模式可以通过简单的数学函数来定义,如线性插值、正弦函数变化、随机噪声等。
例如,线性插值算法可以通过以下公式实现色彩的平滑变化:
R(t) = R1 + t * (R2 - R1)
G(t) = G1 + t * (G2 - G1)
B(t) = B1 + t * (B2 - B1)
其中,R1, G1, B1是起始颜色的RGB值,R2, G2, B2是目标颜色的RGB值,t是变化的参数,取值范围为0到1。通过改变t的值,就可以得到一个从起始色到目标色的平滑色彩过渡效果。
2.2 色彩变化模式的编程实践
2.2.1 使用C语言实现色彩变化
使用C语言实现色彩变化,首先需要设置一个函数来控制单片机的I/O端口输出相应的RGB值。这通常通过编程控制硬件PWM(脉冲宽度调制)信号来完成。以下是实现色彩变化的一个简单示例:
void SetColor(int red, int green, int blue) {
// 设置PWM寄存器以产生相应的RGB值
PWM_RED = red;
PWM_GREEN = green;
PWM_BLUE = blue;
// 更新显示缓冲区
UpdateDisplay();
}
void UpdateDisplay() {
// 实际控制硬件刷新显示的函数
// ...
}
此代码段的逻辑是,通过调用 SetColor 函数,并传入RGB各颜色通道的值,单片机将这些值设置到PWM寄存器中,进而控制连接的LED灯以显示指定颜色。 UpdateDisplay 函数用于触发硬件显示更新。
2.2.2 色彩变化模式的调试与优化
在实现色彩变化之后,调试和优化是不可或缺的步骤。调试可以通过观察实际显示效果和运行逻辑代码来完成。对于性能瓶颈和显示不准确等问题,需要通过优化代码逻辑和硬件设置来解决。
例如,若色彩变化不够平滑,可能需要对色彩变化算法进行优化,比如采用更复杂的插值算法,或者提高PWM分辨率以获得更细致的颜色变化。性能优化包括减少代码中的计算量、优化内存使用,以及调整PWM频率以获得更好的视觉效果。
调试与优化是一个迭代过程,需要不断地观察、测量和改进,以达到最佳的色彩显示效果和系统性能。
3. 渐变模式设计
渐变模式是通过色彩的逐渐变化来创造视觉上的平滑过渡效果,是动态显示中的一个常见功能。在本章中,我们将深入探讨渐变模式的设计原理和编程实现。
3.1 渐变模式的理论基础
3.1.1 渐变模式的数学原理
渐变模式的数学基础主要涉及到色彩空间的插值问题。在RGB色彩空间中,任何一种颜色都可以通过红、绿、蓝三种基本颜色按照不同比例混合得到。当需要实现色彩渐变时,可以通过线性或非线性插值方法,在两种或多种颜色之间计算出一系列的中间色,这些中间色在时间上连续呈现就形成了平滑的色彩过渡效果。
3.1.2 渐变效果的色彩过渡技术
色彩过渡技术的关键在于如何高效且准确地计算出中间色彩。常用的方法包括线性插值(linear interpolation)、余弦插值(cosine interpolation)等。线性插值方法简单,但可能会导致色彩变化过于机械和缺乏自然感。余弦插值则可以提供更为平滑的色彩变化效果,适合需要细腻色彩过渡的应用场景。
3.2 渐变模式的编程实践
3.2.1 编写渐变效果控制代码
在编写渐变效果的控制代码时,首先需要定义起始颜色和结束颜色,然后根据需要过渡的步数进行循环,每次循环都计算出新的中间色,并将其显示出来。以下是一个使用C语言实现的简单线性渐变效果的示例代码。
#include <stdint.h>
// 定义一个函数来计算两种颜色之间的线性插值
uint32_t linearInterpolate(uint32_t startColor, uint32_t endColor, uint8_t step, uint8_t stepsTotal) {
uint8_t r1 = (startColor >> 16) & 0xFF;
uint8_t g1 = (startColor >> 8) & 0xFF;
uint8_t b1 = startColor & 0xFF;
uint8_t r2 = (endColor >> 16) & 0xFF;
uint8_t g2 = (endColor >> 8) & 0xFF;
uint8_t b2 = endColor & 0xFF;
// 计算每一步中间色的RGB值
uint8_t r = (r1 + (r2 - r1) * step / stepsTotal);
uint8_t g = (g1 + (g2 - g1) * step / stepsTotal);
uint8_t b = (b1 + (b2 - b1) * step / stepsTotal);
// 将计算出的RGB值组合成一个颜色值返回
return (r << 16) | (g << 8) | b;
}
// 在主函数中使用linearInterpolate函数实现渐变效果
int main() {
uint32_t startColor = 0xFF0000; // 红色
uint32_t endColor = 0x0000FF; // 蓝色
uint8_t stepsTotal = 10; // 总共的过渡步数
for (uint8_t step = 0; step <= stepsTotal; ++step) {
uint32_t currentColor = linearInterpolate(startColor, endColor, step, stepsTotal);
displayColor(currentColor); // 假设有一个函数用于显示颜色
}
return 0;
}
在上述代码中, linearInterpolate 函数负责计算两种颜色之间的线性插值。每次调用该函数时,都会返回一个中间色彩值,通过在主函数中循环调用 linearInterpolate 并显示得到的颜色,即可实现简单的色彩渐变效果。
3.2.2 渐变模式的用户交互设计
实现渐变模式时,还需要考虑用户的交互设计,以便用户可以轻松地自定义渐变效果。这可能包括选择起始颜色和结束颜色、设置过渡速度和步数等功能。通过为用户提供一个图形化界面,可以让渐变效果的设置更加直观和便捷。
// 伪代码:用户设置起始颜色和结束颜色
startColor = getUserDefinedColor("Start Color: ");
endColor = getUserDefinedColor("End Color: ");
stepsTotal = getUserDefinedSteps("Total Steps: ");
以上伪代码展示了如何通过用户输入来获取起始颜色、结束颜色和过渡步数。 getUserDefinedColor 和 getUserDefinedSteps 函数需要实现用户输入的处理逻辑,而 displayColor 函数负责将计算得到的中间色彩值显示在屏幕上。
渐变模式的用户交互设计应该尽量减少用户的操作难度,提供清晰的指示和反馈,以增强用户体验。在实际应用中,还可以考虑加入动画效果、预设模式和快捷设置等功能来丰富用户的选择和操作体验。
4. 跳变模式设计
4.1 跳变模式的理论基础
4.1.1 跳变模式的特点与设计目标
跳变模式是一种在视觉上实现色彩迅速改变的技术,其主要特点在于色彩的瞬间变化和高对比度的视觉效果。设计此类模式时的目标是实现尽可能平滑和无延迟的色彩切换。为了达到这些目标,设计师必须考虑如何优化代码和硬件配置来减少色彩切换所需的时间。
4.1.2 跳变效果的实现算法
跳变效果的实现通常依赖于预先计算好的色彩数据表和高效的色彩更新策略。算法设计的要点包括:
- 色彩数据的存储方式:为了快速访问,通常采用数组的形式存储颜色值。
- 色彩更新的顺序:为了减少闪烁和色彩混合的视觉残留,应设计合理的更新顺序。
在具体实现时,算法会涉及到色彩值的计算和存储结构的设计。以8种色彩为例,可以定义一个数组,每个元素包含RGB三色的值,通过索引访问不同的色彩数据。
4.2 跳变模式的编程实践
4.2.1 实现色彩快速切换的代码逻辑
#include <reg52.h> // 包含STC90C52的寄存器定义
// 定义色彩数据结构体
typedef struct {
unsigned char r;
unsigned char g;
unsigned char b;
} Color;
// 预先定义色彩数据表
Color colorTable[] = {
{255, 0, 0}, // 红色
{0, 255, 0}, // 绿色
{0, 0, 255}, // 蓝色
// ... 其他色彩
};
// 当前色彩索引
unsigned char colorIndex = 0;
// 更新显示色彩
void UpdateLEDColor() {
Color color = colorTable[colorIndex];
// 此处添加设置LED显示颜色的代码
// 例如: SetLEDColor(color.r, color.g, color.b);
// 更新索引值,实现循环跳变
colorIndex = (colorIndex + 1) % sizeof(colorTable) / sizeof(colorTable[0]);
}
void main() {
while (1) {
UpdateLEDColor();
// 可以添加延时函数来控制跳变速度
// Delay();
}
}
在上述代码中,我们首先定义了一个色彩结构体 Color ,然后创建了一个色彩表 colorTable ,通过 UpdateLEDColor() 函数循环更新显示色彩。在实际的硬件操作中,还需要编写 SetLEDColor() 函数来控制LED显示颜色,并在 main() 函数的无限循环中不断调用 UpdateLEDColor() 来实现连续的色彩跳变。
4.2.2 跳变模式的响应性能优化
为了进一步提高跳变模式的性能,需要对代码和硬件进行优化,以下是具体措施:
- 代码层面: 优化色彩数据访问方式,减少不必要的计算。利用编译器优化指令,减少函数调用开销。
- 硬件层面: 使用高速的微控制器和高响应速度的LED芯片,确保硬件上的色彩更新速度跟得上软件的处理速度。
- 固件层面: 合理安排中断优先级和中断服务程序,避免在色彩切换的关键时刻执行耗时的操作。
- 算法层面: 采用更高效的数据结构,减少数据访问次数,通过算法预测下一跳色彩数据。
通过上述的编程实践和性能优化,跳变模式可以更加流畅地在各种显示设备上呈现,为用户提供更为生动和吸引人的视觉体验。
5. 流水灯模式设计
5.1 流水灯模式的理论基础
5.1.1 流水灯模式的工作原理
流水灯模式是最基础且广为人知的LED灯光效果之一。它模拟了流水的动态效果,通过连续点亮和熄灭一组LED灯来产生光线移动的错觉。流水灯模式的工作原理实际上是在时间上控制LED灯的点亮顺序和熄灭顺序,使其看起来像是流动的光。
5.1.2 灯光效果的时间控制理论
灯光效果的时间控制是流水灯模式的核心。通过精确控制每个LED灯的点亮时长,可以控制光线移动的速度。时间控制的理论依据是时间间隔与移动速度成反比,即时间间隔越短,灯光移动的速度越快。为了达到流畅的视觉效果,时间间隔需要经过精确计算并且稳定执行。
5.2 流水灯模式的编程实践
5.2.1 流水灯效果的代码实现
为了实现流水灯效果,我们可以使用C语言编写程序控制STC90C52单片机。下面的代码展示了如何控制8个LED灯实现简单的流水灯效果。
#include <REGX52.H>
// 延时函数,用于控制流水灯的速度
void delay(unsigned int ms) {
unsigned int i, j;
for (i = ms; i > 0; i--)
for (j = 110; j > 0; j--);
}
// 主函数
void main() {
while (1) {
P1 = 0xFE; // 1111 1110 第一个灯亮,其余灯灭
delay(500); // 延时500ms
P1 = 0xFD; // 1111 1101 第二个灯亮,其余灯灭
delay(500);
// 以此类推,点亮后续的LED灯
P1 = 0xFB;
delay(500);
P1 = 0xF7;
delay(500);
P1 = 0xEF;
delay(500);
P1 = 0xDF;
delay(500);
P1 = 0xBF;
delay(500);
P1 = 0x7F;
delay(500);
}
}
5.2.2 流水灯模式的创意扩展
创意扩展是技术实现和艺术表达之间的桥梁。在流水灯模式的基础上,可以进一步探索多种创意扩展的可能性。例如,可以引入颜色变化,使得流水灯不仅是简单的亮灭,而是在流动的过程中改变色彩,创造出更为丰富的视觉效果。此外,通过调整延时的时间,可以实现不同的流水灯速度,从缓慢的溪流到快速的瀑布,都能给观众带来不同的视觉体验。
通过结合理论与实践,流水灯模式设计不仅能提供基础的视觉效果,还能通过创意的引入让整个设计更加吸引人。这要求设计者在编程时具备良好的逻辑思维和艺术修养,使得最终的产品或应用不仅功能性强,而且具有美感。
6. 彗星拖尾模式设计
6.1 彗星拖尾模式的理论基础
6.1.1 彗星拖尾效果的视觉原理
彗星拖尾效果是一种视觉模拟技术,它模仿了天体运动中彗星在太空中留下光迹的自然现象。在单片机控制的LED显示系统中,彗星拖尾效果通过控制LED的点亮顺序和持续时间,使得LED点阵上呈现出动态的拖尾效果,增强了视觉冲击力。
在视觉原理上,彗星拖尾效果利用了人眼的视觉暂留特性,通过在短时间内快速地切换LED灯的亮灭状态,形成一个连续的发光路径。在该路径上,我们可以通过控制LED点亮的顺序和持续时间来模拟拖尾的长度和速度。
6.1.2 拖尾长度与速度的算法分析
在设计彗星拖尾模式时,需要考虑的关键算法因素包括拖尾的长度和速度。拖尾的长度与速度通常由两个参数控制:一是LED点亮的间隔时间;二是拖尾LED的数量。
- LED点亮的间隔时间决定了拖尾的密度,间隔时间越短,拖尾越密集,视觉效果越连续。
- 拖尾LED的数量则直接影响拖尾的长度。当拖尾LED的数量越多,拖尾看起来就越长。
算法上,我们可以通过设置一个时间阈值和长度阈值来控制拖尾效果。例如,当拖尾LED的数量达到设定的长度阈值,或者时间超过了设定的阈值时,重新开始拖尾的生成过程。
6.2 彗星拖尾模式的编程实践
6.2.1 编写彗星拖尾效果代码
为了实现彗星拖尾效果,我们需要编写一段代码,控制特定的LED灯点亮,并根据算法逐步移动点亮的LED灯。以下是一个简单的C语言代码示例:
#include <reg52.h> // 包含STC90C52单片机的寄存器定义
// 假设使用的是一个8x8的LED点阵,定义相关的端口控制LED
sbit LATCH = P2^0; // 锁存器控制端口
sbit CLK = P2^1; // 时钟控制端口
sbit DATA = P2^2; // 数据输入端口
// 控制LED点阵显示函数
void Display(int row, int col, unsigned char pattern) {
// 发送行地址和列数据到LED点阵显示驱动器
// 这里省略了发送地址和数据的具体实现代码
}
// 彗星拖尾效果函数
void CometTailEffect(int startRow, int startCol, int length) {
int i;
unsigned char pattern = 0x01; // 初始点亮的LED位
for (i = 0; i < length; i++) {
Display(startRow, startCol + i, pattern); // 显示当前拖尾点
pattern <<= 1; // 移动到下一个LED点
// 需要确保移位后不会超出点阵范围
if (pattern == 0) pattern = 0x01;
// 延时函数模拟拖尾效果的速度
Delay(10); // 延时函数实现略
}
}
int main() {
while (1) {
CometTailEffect(0, 0, 8); // 从(0,0)位置开始,拖尾长度为8
}
}
该代码示例中, CometTailEffect 函数负责实现彗星拖尾效果,它接受起始位置、起始列索引和拖尾长度作为参数。函数通过循环移位和显示来模拟拖尾效果。
6.2.2 模式细节的微调与优化
为了实现更平滑且更适应于不同应用场景的彗星拖尾效果,我们可以对基本的拖尾算法进行调整和优化。以下是几种可能的优化措施:
-
速度调整 :通过改变延时函数的参数,可以调整拖尾的速度。在不同的应用场景下,用户可能需要不同的拖尾速度,因此可以提供一个速度参数来动态调整。
c void CometTailEffect(int startRow, int startCol, int length, int speed) { // 其他代码与上面一致 for (i = 0; i < length; i++) { Display(startRow, startCol + i, pattern); pattern <<= 1; if (pattern == 0) pattern = 0x01; Delay(speed); // 根据速度参数来调整延时 } } -
尾部消散效果 :在现实世界中,彗星的拖尾并非始终保持亮度一致,它会随着时间慢慢消散。为了模拟这一现象,我们可以在点亮每个LED点后逐渐减小其亮度。
-
多种拖尾模式 :根据应用需求,可以设计不同的拖尾模式,如短而快的拖尾、长而慢的拖尾等,为用户提供更丰富的选择。
以上代码和优化措施的实现,需要根据具体的硬件平台和显示需求进行调整。编程人员需要在实际的硬件上进行调试,测试拖尾效果是否符合预期,并根据测试结果进行相应的微调。
7. 高级应用技术
7.1 SPI接口应用
7.1.1 SPI接口的技术原理与工作模式
SPI(Serial Peripheral Interface)是一种高速的,全双工,同步的通信总线。它被广泛用于微控制器(MCU)和外围设备之间的通信,如ADC、DAC、传感器和实时时钟等。SPI总线由四个信号线组成:串行数据输出(MISO)、串行数据输入(MOSI)、串行时钟(SCLK)和片选(CS)。
SPI接口有四种不同的工作模式,这四种模式主要由两个参数来确定:时钟极性(CPOL)和时钟相位(CPHA)。具体模式如下:
- 模式0(CPOL=0, CPHA=0):SCLK在空闲时为低电平,在第一个时钟沿采样数据,第二个时钟沿输出数据。
- 模式1(CPOL=0, CPHA=1):SCLK在空闲时为低电平,在第一个时钟沿采样数据,第二个时钟沿输出数据。
- 模式2(CPOL=1, CPHA=0):SCLK在空闲时为高电平,在第一个时钟沿采样数据,第二个时钟沿输出数据。
- 模式3(CPOL=1, CPHA=1):SCLK在空闲时为高电平,在第一个时钟沿采样数据,第二个时钟沿输出数据。
7.1.2 SPI在LED显示系统中的应用案例
在LED显示系统中,SPI接口常用于与LED驱动芯片通信,实现对LED的精确控制。以下是一个应用案例:
// SPI初始化函数
void SPI_Init() {
// 初始化SPI相关参数(略)
}
// SPI发送数据函数
void SPI_SendData(uint8_t data) {
// 发送数据到SPI总线(略)
}
// 主函数
int main() {
// 初始化SPI接口
SPI_Init();
// 配置LED显示参数(略)
// 控制LED显示
while (1) {
// 根据需要发送数据到LED驱动芯片
SPI_SendData(data);
}
return 0;
}
7.2 LED驱动技术应用
7.2.1 LED驱动技术要点与挑战
LED驱动技术是实现LED显示效果的关键技术之一。其要点包括恒流驱动、亮度调节、色度控制等。挑战主要包括提高驱动效率,降低功耗,以及实现更复杂的显示效果。
7.2.2 驱动技术在色彩变化中的优化
在色彩变化中,LED驱动技术可以通过调整电流大小来改变LED的亮度,通过调整RGB三基色的电流比例来改变LED的颜色。此外,还可以采用PWM(脉冲宽度调制)技术,通过调整脉冲宽度来改变电流大小,从而实现更精细的亮度和色彩调节。
// PWM设置函数
void PWM_Set(uint8_t channel, uint8_t dutyCycle) {
// 根据通道和占空比设置PWM(略)
}
// 驱动LED函数
void LED_Drive(uint8_t red, uint8_t green, uint8_t blue, uint8_t brightness) {
// 根据RGB值和亮度设置LED驱动电流(略)
}
7.3 无线通信技术应用
7.3.1 无线通信技术概述与选择
无线通信技术在远程控制LED显示系统中起到了关键作用。常用的无线通信技术包括蓝牙、Wi-Fi、ZigBee等。在选择无线通信技术时,需要考虑传输距离、数据传输速率、功耗、成本等因素。
7.3.2 无线技术在远程控制中的实现
以下是一个使用Wi-Fi进行远程控制LED显示系统的例子:
// Wi-Fi初始化函数
void WiFi_Init() {
// 初始化Wi-Fi模块(略)
}
// Wi-Fi接收数据函数
void WiFi_ReceiveData() {
// 接收远程指令(略)
}
// 主函数
int main() {
// 初始化Wi-Fi
WiFi_Init();
// 初始化SPI和LED驱动(略)
// 开始接收远程指令
while (1) {
WiFi_ReceiveData();
}
return 0;
}
通过Wi-Fi模块接收远程指令,然后通过SPI接口将指令传输给LED驱动芯片,实现远程控制LED显示系统的目标。
简介:本项目基于STC公司优化的STC90C52单片机,设计实现84种不同的色彩变化效果,为LED灯或显示设备增添丰富视觉表现力。通过编程实现渐变、跳变、流水灯和彗星拖尾等多种模式,每种模式具有不同的速度、颜色组合和动态效果。STC90C52单片机丰富的I/O端口与内部定时器和中断系统,使得控制LED灯阵列和实现各种动画效果变得简单。此外,该项目还可能集成了RF6B无线模块,支持远程控制幻彩模式的选择或参数调整。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 9
9 0
0- 0



 已为社区贡献47条内容
已为社区贡献47条内容

所有评论(0)