
揭秘UPS的“大脑”:从零读懂嵌入式软件架构(附源代码解析)
本文拆解了一款商用UPS不间断电源的嵌入式固件架构,展示了在16位单片机(仅64KB Flash/5KB RAM)上实现电力管理的极致优化方案。固件采用四层金字塔架构(RTOS内核层、驱动层、模块层、任务层),通过自研精简RTOS、查表法优先级调度、双PI参数调节等创新设计,在资源受限条件下同时完成逆变控制、电池管理、多重保护等六大核心功能。文章详细剖析了模块化设计、任务调度机制、中断处理等关键技
你有没有过这样的经历?正在赶项目、存数据时,市电突然中断,屏幕瞬间变黑——但服务器、电脑却能平稳衔接,继续正常运行。
这背后,全靠UPS不间断电源的“默默守护”。而支撑UPS精准响应、稳定工作的核心,正是它的“大脑”——嵌入式固件。
今天,我们就来拆解一套商用UPS的真实固件源码,看看这个“电力守护者”的软件架构,是如何在极度有限的资源下,实现全方位的电力管理的。
文章来源于微信公众号:光储能源站
一、写在前面:资源受限下的极致设计
我们拆解的这套固件,来自XXX的在线式UPS,运行在一颗极其“朴素”的16位单片机上——Renesas R8C/2D,仅拥有64KB Flash(相当于一张老式软盘的容量)、5KB RAM(不到手机内存的千万分之一)。
就是在这样苛刻的资源限制下,它要同时完成6大核心任务:
- ⚡ 逆变器输出控制(电压、频率、相位同步,保证供电稳定)
- 🔋 电池充放电管理(延长电池寿命,精准把控电量)
- 🛡️ 多重保护逻辑(过压、欠压、过流等,避免设备损坏)
- 📺 LCD/LED面板显示(实时反馈UPS工作状态)
- 📡 RS232/SNMP通信协议(支持本地+网络监控)
- ⏱️ 实时任务调度(多个任务有序协作,不卡顿、不遗漏)
看似不可能完成的任务,答案就藏在它的软件架构里。
二、整体架构:四层金字塔,各司其职不混乱
这套软件的架构就像一座金字塔,从底到顶分为四层,每层职责清晰、层层调用,既保证了解耦,又提升了可维护性。
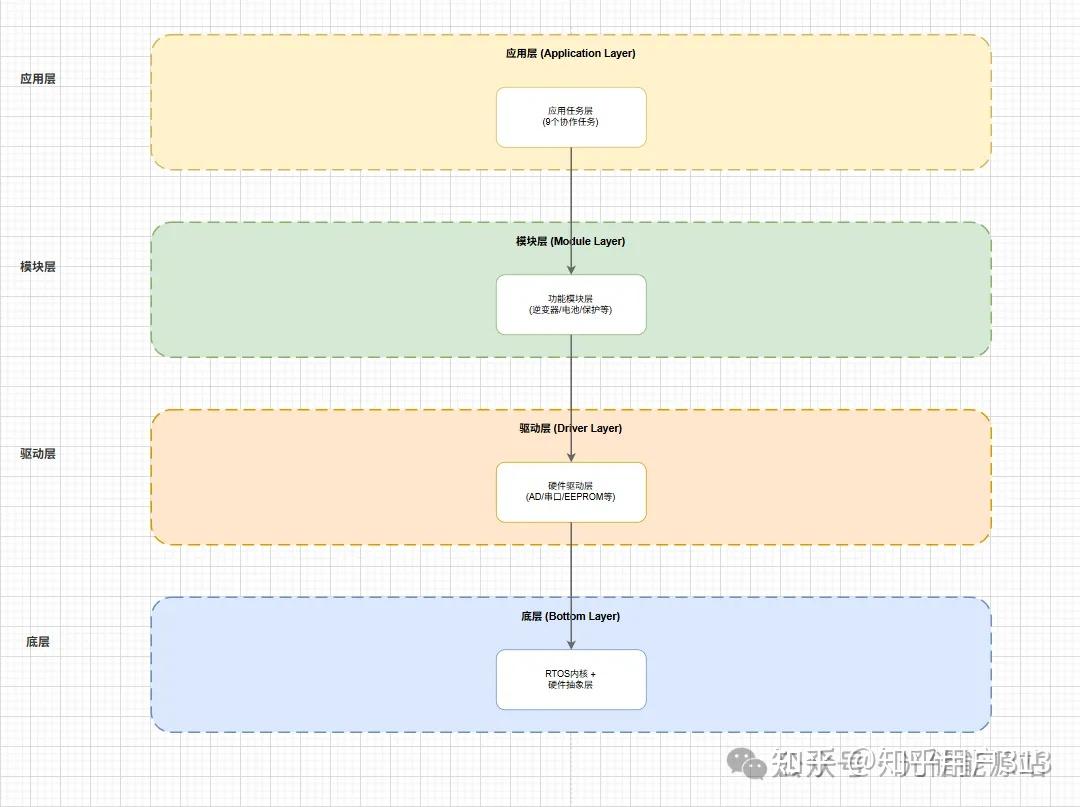
这种分层设计的优势,用一张表就能看明白:
| 优势 | 说明 |
|---|---|
| 解耦 | 上层不关心底层实现,底层变化不影响上层(比如换单片机,只需修改驱动层) |
| 复用 | 驱动层和模块层可直接移植到其他UPS项目,减少重复开发 |
| 测试 | 每层可独立测试,出现问题能快速定位(比如显示异常,直接查驱动层) |
| 维护 | 新人接手时,按层理解即可,无需通读全部代码 |
三、底层:自研RTOS内核,极致精简才够用
3.1 为什么不直接用FreeRTOS?
很多嵌入式开发者会问:市面上有FreeRTOS、μC/OS等成熟内核,为什么还要自己写?
答案很简单:资源不够用。
这颗MCU只有5KB RAM,而FreeRTOS光内核本身就要占用几KB,再加上任务栈、变量,根本不够用。于是工程师们量身定制了一个极简RTOS内核,整个内核只有4个文件,不到500行代码!
它的核心数据结构——任务控制块(TCB),也精简到了极致:
// 核心数据结构:任务控制块
typedef struct{
OS_STK *OSTCBStkPtr; // 栈指针(任务切换的关键)
INT16U TimerPeriod; // 定时器周期
INT16U TimerCnt; // 定时器计数
TASK_EVENT OSEvent; // 事件标志
TASK_EVENT OSEventBitMask; // 事件掩码
} OS_TCB;3.2 优先级查找:O(1)的效率魔法
任务调度的核心问题是:在多个就绪任务中,谁先占用CPU?
传统做法是遍历所有任务找最高优先级,时间复杂度是O(n)——任务越多,响应越慢。但这个自研内核用了一个巧妙的查表法,直接把时间复杂度降到O(1)。
// 优先级查找表:输入4位值,输出最低位1的位置
const INT8U OSUnMapTbl[16] = {
255, 0, 1, 0, // 0000→无, 0001→0, 0010→1, 0011→0
2 , 0, 1, 0, // 0100→2, 0101→0, 0110→1, 0111→0
3 , 0, 1, 0, // ...
2 , 0, 1, 0
};
// 就绪表是一个16位整数,每一位代表一个任务是否就绪
// 例如:OSRdyMap = 0x0022 = 0b00100010
// 表示优先级1和5的任务就绪,应选择优先级1
INT8U OSFindHighPrio(void) {
if(OSRdyMap & 0x000F) // 检查优先级0-3
return OSUnMapTbl[OSRdyMap & 0x000F];
else if(OSRdyMap & 0x00F0) // 检查优先级4-7
return OSUnMapTbl[(OSRdyMap>>4) & 0x000F] + 4;
// ...以此类推
}
一次查表,就能直接找到最高优先级的任务,哪怕有16个任务,响应速度也不会变慢——这就是嵌入式开发中“极致优化”的体现。
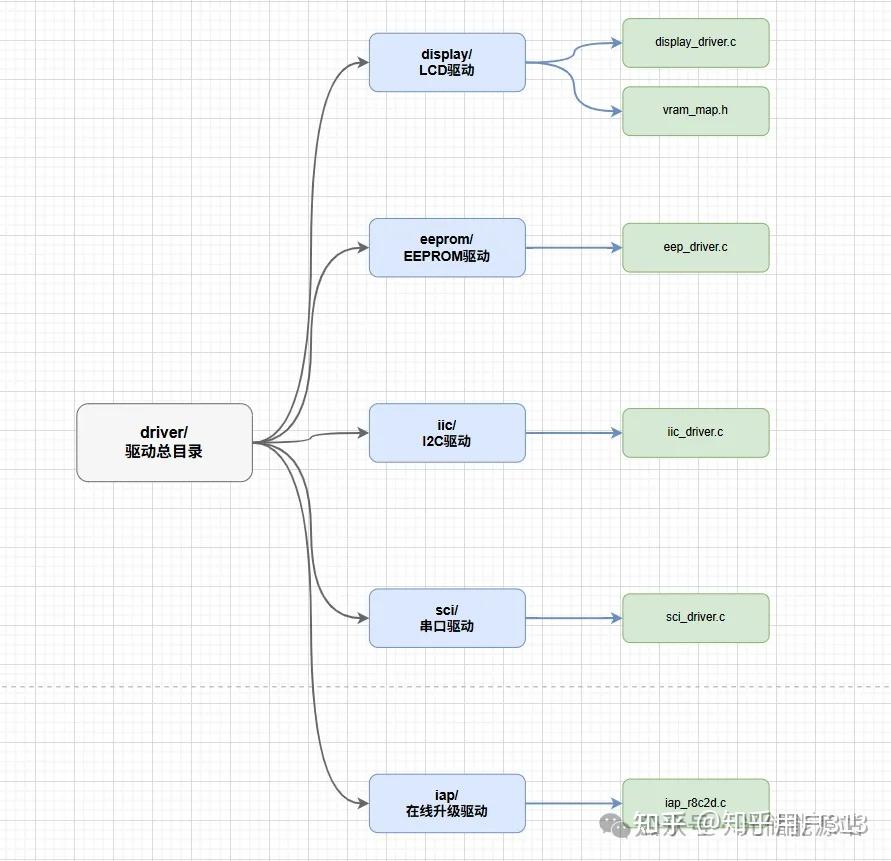
四、驱动层:硬件的“翻译官”,移植起来超简单
驱动层的核心职责,就是把复杂的硬件操作(比如操作LCD、读取AD值),封装成简单的函数接口,让上层软件不用关心硬件细节。
4.1 驱动目录结构
4.2 驱动设计模式:三文件分离
每个驱动都遵循“配置-端口-实现”的三文件分离模式,这也是它能快速移植的关键。以EEPROM驱动为例:
// 1. 配置文件:定义硬件参数(eep_config.h)
#define EEPROM_PAGE_SIZE 64
#define EEPROM_ADDR 0xA0
// 2. 硬件端口映射:定义引脚(eep_hard_ports.h)
#define EEPROM_SCL_PIN P3_0
#define EEPROM_SDA_PIN P3_1
// 3. 驱动实现:提供接口函数(eep_driver.c)
void EEPROM_Init(void);
void EEPROM_Write(INT16U addr, INT8U *data, INT16U len);
void EEPROM_Read(INT16U addr, INT8U *data, INT16U len);
如果要把这套驱动移植到另一颗单片机,只需修改“硬件端口映射”文件,不用动核心的读写逻辑——极大降低了移植成本。
五、模块层:UPS的“智能核心”,算法都在这里
模块层是整个系统的“大脑中枢”,包含了UPS所有的“智能决策”,比如逆变器如何调节电压、电池如何充电、出现故障如何保护。
5.1 模块划分:各司其职,互不干扰
| 模块 | 文件 | 核心职责 |
|---|---|---|
| 逆变器 | module_inverter.c | 输出电压调节、频率控制、相位同步 |
| 电池 | module_battery.c | 充电控制、容量计算、状态监测 |
| 母线 | module_bus.c | 直流母线电压控制 |
| 旁路 | module_bypass.c | 旁路切换逻辑(市电异常时快速切换) |
| 其他模块 | 市电/负载/输出/保护/ECO | 市电检测、负载计算、故障保护、节能模式 |
5.2 模块设计原则:高内聚、低耦合
每个模块都遵循“自己的事自己做,不插手别人的事”的原则,模块之间只通过接口函数通信,绝不直接访问对方的变量。以逆变器模块为例:
// 模块内部结构(module_inverter.c)
// 1. 私有参数(只能本模块访问,对外隐藏)
static INT16U wInverterVoltHigh; // 过压阈值
static INT16U wInverterVoltLow; // 欠压阈值
// 2. 输出变量(供其他模块读取,不能直接修改)
INT16U wRInverterVoltNew; // 实时输出电压
// 3. 功能函数(内部实现,对外隐藏)
static void sRInverterVoltRegu(...) // PI电压调节器
{
// 增量式PI算法,实现电压精准控制
dwDelt = ((wRKp + wRKi) * wRVoltError - wRKp * wRVoltError0) >> 14;
wRNewSinAmp += dwDelt;
}
// 4. 接口函数(对外暴露,供其他模块调用)
INT16U swGetRInverterVoltNew(void) // 获取实时电压
{
return wRInverterVoltNew;
}
void sSetInverterVoltSet(INT16U volt) // 设置目标电压
{
wInverterVoltSet = volt;
}
这种设计的好处是:如果逆变器的控制算法需要修改,只需改动本模块,不会影响电池、保护等其他模块——后期维护起来极其方便。
5.3 逆变器控制:双PI参数的“智慧调节”
逆变器的核心是电压调节,既要快速响应电压变化,又要保证输出稳定。这套固件用了“双PI参数”的设计,完美解决了这个问题:
void sRInverterVoltRegu(INT16U wRTrackVolt, ...)
{
// 计算目标电压与实际电压的误差
wRVoltError = wRTrackVolt - wRInverterVoltNew;
// 关键:根据误差大小切换PI参数
if(wRVoltError >= wRErrorLimit) {
// 误差大(比如市电突然中断):用快速响应参数
wRKp = wRKp2; // 较大的比例系数,快速拉近误差
wRKi = wRKi2; // 较大的积分系数,加快响应速度
} else {
// 误差小(电压接近稳定):用精细调节参数
wRKp = wRKp1; // 较小的比例系数,避免波动
wRKi = wRKi1; // 较小的积分系数,精准稳定
}
// 增量式PI计算,调整正弦波幅值(控制输出电压)
dwDelt = ((wRKp + wRKi) * wRVoltError - wRKp * wRVoltError0) >> 14;
wRNewSinAmp += dwDelt;
}
简单说:误差大时“猛踩油门”,快速响应;误差小时“轻踩刹车”,精准稳定——这就是UPS输出电压能保持平稳的核心原因。
六、任务层:九大任务协作,有序不混乱
模块层提供了核心算法,而任务层则负责调度这些算法,让它们在合适的时间执行。系统共有9个任务,按优先级从高到低排列,确保关键任务优先执行。
6.1 任务全景图
| 优先级 | 任务名 | 周期 | 核心职责 |
|---|---|---|---|
| 0(最高) | sTaskModeSwitch | 1秒 | UPS模式切换(市电↔电池↔旁路) |
| 1 | sTaskOnOff | 1秒 | 开关机控制,保障设备安全启停 |
| 2 | sTaskUtility | 4毫秒 | 市电质量检测(电压、频率是否正常) |
| 3 | sTaskPanel | 500毫秒 | LCD/LED面板显示更新,反馈工作状态 |
| 4 | sTaskOutput | 10毫秒 | 输出电压控制,调用逆变器模块算法 |
| 5 | sTaskMisc | 4毫秒 | 风扇、温度等杂项控制,保障设备散热 |
| 6 | sTaskUart1 | 10毫秒 | SNMP网络通信,支持远程监控 |
| 7 | sTaskSavePara | 1秒 | 参数保存到EEPROM,防止断电丢失 |
| 8(最低) | sTaskUart0 | 事件驱动 | RS232本地通信,支持本地调试 |
6.2 任务的工作方式:无限循环+事件驱动
每个任务都是一个无限循环,不会主动退出,而是通过“等待事件”来触发执行——这样既能保证实时性,又能节省CPU资源。以模式切换任务为例:
void sTaskModeSwitch(void)
{
while(1) {
// 等待定时器事件(每1秒触发一次)
OSMaskEventPend(OS_EVENTID_TIMER);
// 执行模式切换逻辑
if(市电正常 && 当前是电池模式) {
切换到市电模式(); // 市电恢复,切换回市电供电
}
else if(市电异常 && 当前是市电模式) {
切换到电池模式(); // 市电中断,切换到电池供电
}
// 任务结束,自动让出CPU,给其他任务执行
}
}6.3 任务间通信:事件标志“握手”
任务之间不会直接调用,而是通过“事件标志”来通信,这样能最大限度降低耦合。比如市电检测任务发现市电异常,会通知模式切换任务:
// 任务A:市电检测任务(sTaskUtility)
void sTaskUtility(void)
{
while(1) {
OSMaskEventPend(OS_EVENTID_TIMER); // 每4毫秒检测一次
if(检测到市电异常()) {
// 发送“市电异常”事件,通知模式切换任务
OSEventSend(PRIO_MODE_SWITCH, OS_EVENTID_UTILITY_FAIL);
}
}
}
// 任务B:模式切换任务(sTaskModeSwitch)
void sTaskModeSwitch(void)
{
while(1) {
// 等待定时器事件 或 市电异常事件
event = OSMaskEventPend(OS_EVENTID_TIMER | OS_EVENTID_UTILITY_FAIL);
if(event & OS_EVENTID_UTILITY_FAIL) {
切换到电池模式(); // 收到事件,立即执行切换
}
}
}七、中断服务程序:实时响应的“紧急通道”
有些事情必须“立即响应”,不能等任务轮询——比如AD采样、PWM生成,这就是中断的职责。中断就像一条“紧急通道”,一旦触发,CPU会暂停当前任务,优先执行中断程序。
7.1 核心中断列表
| 中断 | 触发时机 | 核心职责 |
|---|---|---|
| isr_sine_point.c | 每个PWM周期 | AD采样、正弦波生成(最核心的中断) |
| isr_zero_cross.c | 过零点 | 频率/相位测量,保证输出与市电同步 |
| isr_uart.c | 串口收发 | 通信数据缓冲,避免数据丢失 |
| isr_500us_tick.c | 每500μs | 系统滴答、任务调度,保证任务周期准确 |
7.2 中断与任务的配合:快慢分离
中断负责“快速采集、快速响应”,任务负责“慢速处理、逻辑决策”,两者配合,既保证了实时性,又避免了CPU资源浪费:
// 中断:快速采集(必须快,不能占用太多时间)
void isr_sine_point(void)
{
// 读取AD值(电压、电流),快速完成
wInvVoltAD = ADC_read();
wInvCurrAD = ADC_read();
// 生成PWM信号,控制逆变器输出
PWM_update(wSinTable[wIndex]);
}
// 任务:慢速处理(可以稍慢,负责算法逻辑)
void sTaskOutput(void)
{
while(1) {
OSMaskEventPend(OS_EVENTID_TIMER); // 每10毫秒执行一次
// 电压调节算法(调用模块层函数)
sRInverterVoltRegu(wTargetVolt, ...);
}
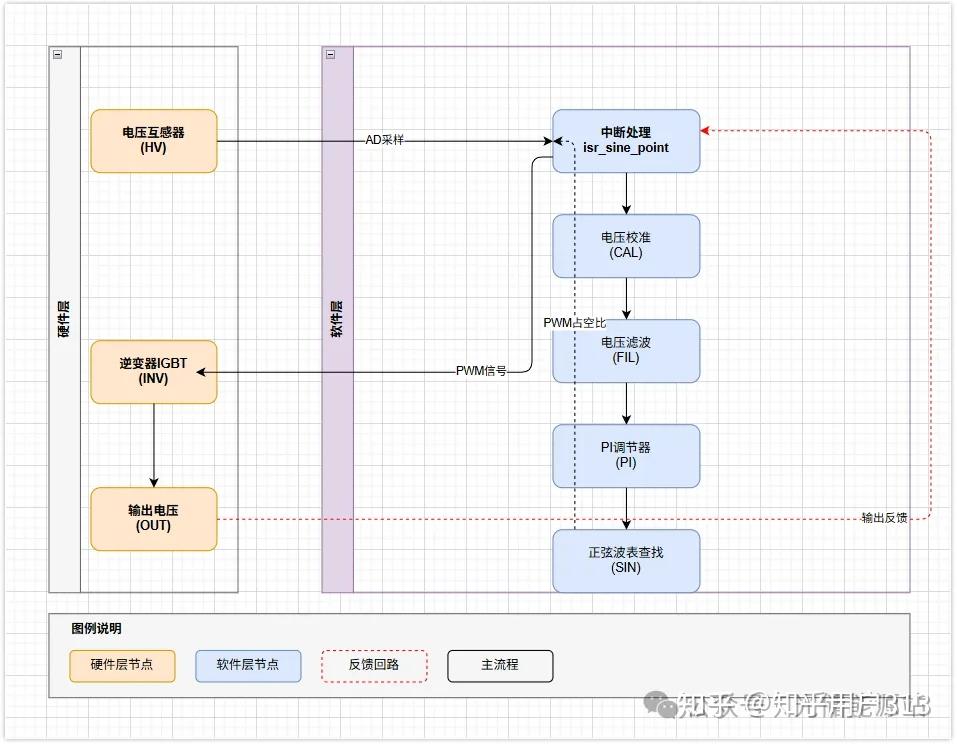
}八、数据流:从AD采样到PWM输出的完整闭环
我们可以追踪一个完整的控制闭环,看看UPS是如何精准控制输出电压的——整个闭环在几十微秒内完成,确保电压稳定:
九、通信协议:UPS的“对外语言”
UPS需要与外界通信——接受监控、配置参数,甚至远程关机,这就需要一套标准的通信协议。
9.1 VPCP协议:UPS的核心通信协议
这套固件实现了自定义的VPCP协议,帧结构清晰,便于解析:

常用命令也很简洁,比如:
#define CMD_GET_STATUS 0x01 // 获取UPS工作状态
#define CMD_GET_VOLTAGE 0x02 // 获取输出电压
#define CMD_SET_VOLTAGE 0x03 // 设置目标电压
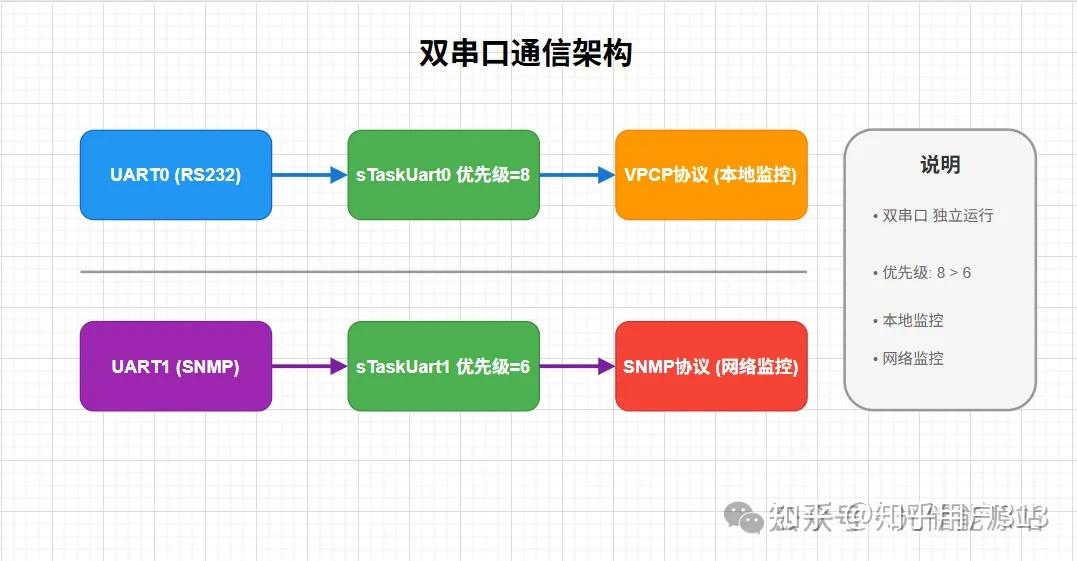
#define CMD_SHUTDOWN 0x04 // 远程关机命令9.2 双串口设计:本地+网络双监控
系统设计了两个串口,分别负责本地和网络监控,满足不同场景需求:
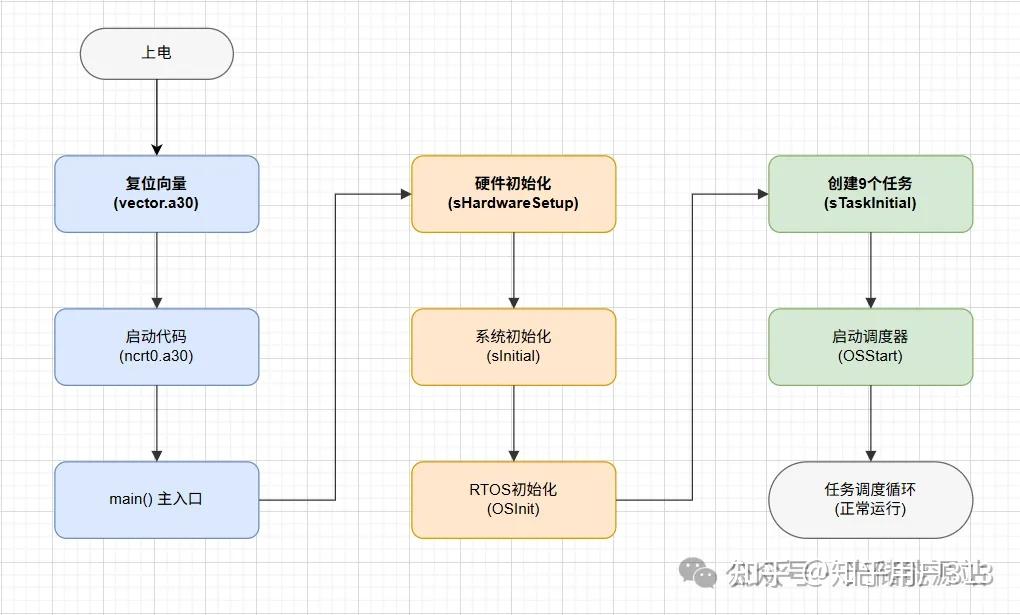
十、启动流程:从上电到运行,一步都不能少
UPS上电后,不是直接进入工作状态,而是要经过一系列初始化流程,确保系统稳定启动:
十一、设计亮点总结:极致优化,稳字当头
这套固件最让人佩服的,不是复杂的算法,而是在资源极度受限的情况下,做到了“极致优化”和“稳定可靠”,总结下来有三大亮点:
11.1 资源优化:每1字节都用在刀刃上
| 优化点 | 手法 | 效果 |
|---|---|---|
| RTOS内核 | 自研极简版,仅保留核心功能 | 仅占几百字节,节省大量RAM |
| 任务栈 | 静态分配,共享空间 | 所有任务栈总共仅1.5KB |
| 优先级查找 | 查表法 | 时间复杂度O(1),响应更快 |
| 常量存储 | 放在Flash中,不占用RAM | 最大化节省宝贵的RAM资源 |
11.2 可靠性设计:多重保障,杜绝故障
- 看门狗:防止程序跑飞,出现异常自动复位
- 参数校验:读取EEPROM数据时,验证有效性,避免错误参数导致故障
- 多重保护:涵盖过压、欠压、过流、短路、过温等,全方位保护UPS和负载
- 故障记录:自动记录历史故障,便于后期诊断和维护
11.3 可维护性设计:分工清晰,便于迭代
- 分层架构:四层结构,职责清晰,新人易上手
- 模块化:高内聚、低耦合,修改一个模块不影响其他模块
- 接口封装:隐藏底层实现细节,上层调用更简单
- 配置分离:参数集中管理,修改参数无需改动核心代码
十二、写在最后
拆解完这套UPS固件,我最大的感受是:好的嵌入式软件,从来不是“炫技”,而是“务实”。
没有华丽的框架,没有复杂的设计模式,只有几百行精简的内核、清晰的分层架构、精准的算法优化——工程师们用最朴素的代码,在极其有限的资源下,实现了稳定可靠的电力保护功能。
如果这篇文章对你有帮助,欢迎点赞、在看、转发,让更多人看到。
欢迎关注微信公众号:光储能源站

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 14
14 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)