
TDOA技术在Keil环境下的代码实现
Keil是专为嵌入式系统设计的集成开发环境(IDE),提供了从软件开发到硬件仿真的所有工具。在进行项目开发时,项目管理器是一个核心组件。启动Keil uVision,可以见到一个包含多个部分的主界面。项目管理器位于界面左侧,这里列出了所有项目的文件和设置。创建一个新项目时,首先点击“Project”菜单下的“New uVision Project…”,在弹出的窗口中选择一个合适的目录保存项目文件,

简介:TDOA是一种利用时间差来确定目标位置的定位技术,在无线通信和物联网中得到广泛应用。Keil作为嵌入式开发工具,为实现TDOA提供了便利的开发环境。本文将详细介绍TDOA的基本原理以及如何在Keil环境中通过编写代码实现TDOA定位,包括信号处理、时间差计算和定位算法等关键步骤,并探讨在实际应用中如何优化算法和考虑外部因素。 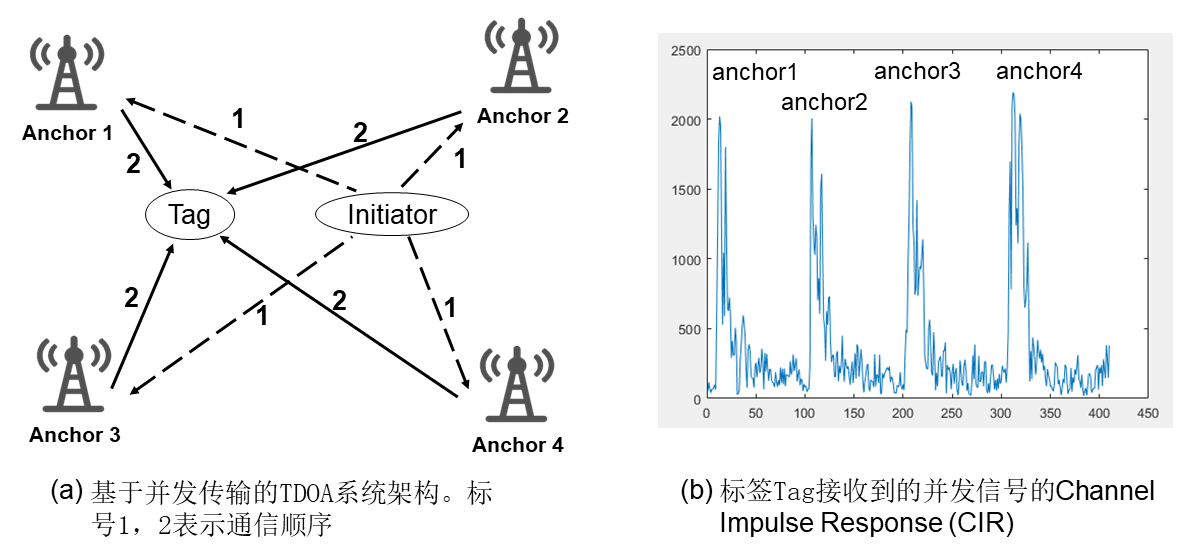
1. TDOA技术原理
TDOA(Time Difference of Arrival)技术,即到达时间差技术,是无线定位技术中应用较广的一种方法。其原理是利用测量信号源到不同接收点的时间差,并根据这些时间差计算出信号源的准确位置。
1.1 TDOA技术的基本原理
在TDOA定位系统中,首先需要在三个或以上的位置设立接收器,当信号源发射信号时,各接收点会根据信号到达的时刻进行记录。这些记录的时间信息差值,可以作为计算信号源位置的依据。
1.2 TDOA技术的优势和应用
TDOA技术的优势在于对时间的测量比对信号强度的测量更加准确和稳定,这使得它在室内定位、无线通信等领域得到广泛应用。此外,TDOA系统对发射器的要求较低,因为它主要依靠多个接收器进行定位。
1.3 TDOA技术的局限性
然而,TDOA技术也存在局限性。例如,在高噪声或干扰严重的环境中,时间差的测量会受到影响,从而影响定位精度。此外,为了获得更精确的时间差,硬件设备需要具备一定的性能和精确度。在接下来的章节中,我们将深入探讨如何通过优化硬件和算法,以及使用RTOS等手段,来克服这些局限性。
2. Keil开发工具的使用与配置
2.1 Keil软件界面介绍
2.1.1 项目管理器的使用
Keil是专为嵌入式系统设计的集成开发环境(IDE),提供了从软件开发到硬件仿真的所有工具。在进行项目开发时,项目管理器是一个核心组件。启动Keil uVision,可以见到一个包含多个部分的主界面。项目管理器位于界面左侧,这里列出了所有项目的文件和设置。
创建一个新项目时,首先点击“Project”菜单下的“New uVision Project…”,在弹出的窗口中选择一个合适的目录保存项目文件,并为其命名。之后会进入“Select Device for Target”窗口,在这里可以选择目标微控制器(MCU),根据你的硬件设备选择对应的型号。
项目创建完成后,可以添加文件到项目中。在项目窗口中,右击“Target 1”选择“Add New Item to Group ‘Source Group 1’”,在这里可以创建或添加源代码文件(.c/.cpp/.s/.asm),头文件(.h),以及其它项目需要的文件类型。
为了更好地管理项目文件,可以将文件进行分组。右击项目树中的“Source Group 1”选择“Add Group”,然后可以将相关的文件拖放到这个新建的组中。这有助于在庞大的项目中保持组织性和可读性。
2.1.2 调试界面的基本操作
调试是开发过程中的关键步骤,Keil提供了强大的调试工具。在完成代码编写后,点击工具栏的“Debug”按钮或按快捷键F5进入调试模式。调试界面主要包含以下几部分:
- Code区 :显示当前执行的源代码。
- Register区 :展示当前CPU寄存器的值。
- Memory区 :用于查看和编辑内存内容。
- Watch区 :可以添加表达式,实时监控其值。
- Call Stack区 :显示函数调用堆栈信息。
- Variables区 :列出当前作用域的变量。
为了定位代码中的问题,可以使用断点、单步执行、变量监视和逻辑分析器等功能。在需要停止程序执行的位置点击代码行左侧,可以设置断点。使用单步执行(F11)可以逐行执行代码,查看程序在各个执行点的状态。
代码块示例 :
void main(void)
{
// 这里是一个简单的例子,演示如何使用断点和单步执行
uint32_t value = 0;
value = 10; // 这里设置断点,观察变量value的变化
while(1)
{
// 这里可以添加其他逻辑
}
}
调试时,先按F5启动调试,当执行到断点位置时程序会自动暂停。此时可以通过观察变量的值或修改它们来测试不同的执行路径。调试界面的使用,对于确保程序按照预期运行至关重要,能够帮助开发者快速定位和修复bug。
2.2 Keil环境下代码编译与烧录
2.2.1 编译器设置与优化
代码编写完成后,需要编译成可以在目标微控制器上运行的机器码。在Keil中,编译设置可以通过“Project”菜单中的“Options for Target”选项进行配置。
在“Options for Target”窗口中,有几个重要的标签页:
- Target标签 :可以设置代码的起始地址,链接器脚本等。
- Output标签 :这里可以指定编译生成的输出文件,如HEX文件,用于烧录到微控制器。
- C/C++标签 :用于配置编译器的优化级别,代码警告和错误设置。
- Debug标签 :在这里选择调试器类型和调试信息的详细程度。
编译器优化级别的设置非常重要,它关系到最终代码的效率和大小。通常有以下几种优化级别:
- Level 0 :不进行优化,便于调试。
- Level 1 :进行基本优化,但不影响调试。
- Level 2 :进行更高级的优化,但仍然保持可调试性。
- Level 3 :进行最高级别的优化,适合发布版本,但可能会增加调试难度。
选择正确的优化级别能够显著提高程序的性能,但过于激进的优化可能会导致程序行为的不可预测性,特别是在进行底层硬件操作时。
代码逻辑分析 :
void delay(uint32_t time)
{
volatile uint32_t i, j;
for(i = 0; i < time; i++)
{
for(j = 0; j < 1000; j++)
{
// 空循环,用于延时
}
}
}
在这个例子中, delay 函数使用嵌套循环产生延时。如果设置较高的编译优化级别,编译器可能会优化掉这个延时,因为它看起来像是无用代码。为了防止这种情况,需要告诉编译器这段代码是故意为之,可以使用 volatile 关键字标记变量,告诉编译器这些变量的值可能会在程序运行时改变。
2.2.2 烧录工具的使用方法
在编译完成后,我们需要将生成的HEX文件烧录到目标硬件上。Keil提供了一个集成的调试器和程序下载器,可以简化烧录过程。首先确保你的硬件开发板已经与电脑连接并且驱动程序已经正确安装。
点击工具栏的“Flash”按钮或按快捷键Ctrl+F开始烧录。如果一切设置正确,Keil将自动下载程序到目标设备。在烧录过程中,你可能需要按下开发板上的复位按钮或使用外部调试器进行复位,以确保设备处于可烧录的状态。
烧录完成后,可以通过按下开发板上的复位按钮或者在Keil中点击“Debug”按钮来运行程序。
使用Keil的烧录工具可以快速有效地将代码部署到目标硬件上。需要注意的是,不同的开发板可能有不同的烧录要求,应当参考开发板手册中的指南进行操作。适当的烧录方法不仅能够减少开发时间,还可以提高程序的可靠性和稳定性。
3. 信号时间戳记录与处理
3.1 时间戳获取技术
3.1.1 时钟同步技术
时间戳获取是时间差定位(TDOA)技术中的核心环节,确保在不同接收点间对信号的到达时间进行精确同步是实现准确定位的前提。时钟同步技术在这一过程中扮演着至关重要的角色。
传统上,时钟同步可以分为两大类:基于同步信号的同步方法和基于时间传递的同步方法。基于同步信号的方法中,如NTP(网络时间协议),GPS(全球定位系统)等,它们依赖于外部信号的精确时间信息以同步本地时钟。而基于时间传递的方法,则通过测量时间间隔来计算时间差,利用双向或多向时间传输的方式来校正时钟偏差。
在TDOA应用场景中,通常会采用基于时间传递的方法。这是因为许多应用场合下,外部同步信号可能不可靠或不精确。基于时间传递的方法可以使用高精度的信号传输模型,如无线电信号,来进行时间测量和同步。通常利用特定的信号特征,如信号前沿,或者特定的协议帧,来标记时间戳。
在实际操作中,接收器通常会内置高精度时钟,例如晶振(晶振频率稳定性可达百万分之一以上),并在接收到特定信号时通过软件方式记录时间戳。为了进一步提升精度,会定期利用外部时钟信号进行校准。
3.1.2 时间戳标记方法
时间戳的标记方法直接影响到TDOA定位的准确性。在信号处理过程中,时间戳的准确记录是至关重要的。由于信号在传播过程中会产生失真,所以标记时间戳时需要选择合适的信号特征点。
常见的标记方法包括:
- 信号前沿检测:检测信号上升沿的过零点作为时间戳标记点。
- 相关峰值检测:当信号与已知模板信号的相关系数达到最大值时,标记为时间戳。
- 信号能量检测:在信号能量超过预设阈值的时刻标记时间戳。
以下是使用信号能量检测标记时间戳的简单伪代码示例:
// 假设 signal 是接收到的信号数据数组,threshold 是能量阈值
for (int i = 0; i < signal_length; i++) {
if (signal[i] > threshold) {
// 当检测到信号能量超过阈值时记录时间戳
time_stamp = i;
break;
}
}
在标记时间戳时,还需考虑到信号的噪声和多径效应等干扰因素,以确保所标记的时间戳尽可能地准确。在实际应用中,这些干扰可能需要通过复杂的算法来预测和补偿。
3.2 时间戳数据的后处理
3.2.1 数据滤波与异常值处理
获取的时间戳数据往往包含了噪声和异常值,这些因素会影响到最终的定位结果。因此,在进行时间差计算之前,需要对数据进行滤波和异常值处理。滤波技术可以有效去除信号中的高频噪声,而异常值的检测和处理则可以帮助识别和排除由于硬件故障或其他非典型情况导致的错误数据。
常见的数据滤波方法有:
- 均值滤波:通过计算时间戳周围的多个样本值的平均数来平滑信号。
- 中值滤波:用时间戳周围的样本值的中值代替当前值,以减少异常值的影响。
- 高斯滤波:使用高斯分布函数对信号进行加权平均,以减少噪声干扰。
伪代码示例展示了一个简单的中值滤波过程:
// 对于时间戳数组 time_stamps
for (int i = window/2; i < time_stamp_length - window/2; i++) {
// 创建一个大小为 window 的临时数组
int temp_window[window];
for (int j = 0; j < window; j++) {
temp_window[j] = time_stamps[i - window/2 + j];
}
// 对临时数组进行排序
sort_array(temp_window, window);
// 用中值替换原时间戳数组中的值
time_stamps[i] = temp_window[window/2];
}
异常值的处理通常涉及统计方法,比如标准差法、Z-分数法等。这种方法通过对数据集进行统计分析,识别那些与大多数数据明显不符的值,并进行适当的处理。
3.2.2 时间戳同步精度分析
时间戳同步精度分析是为了评估同步过程中的误差范围和系统的整体表现。精度分析通常需要对时间戳数据进行统计分析,并计算平均误差、标准差等统计量。
对时间戳数据的精度分析可以通过以下步骤进行:
- 收集同步时间戳数据。
- 计算数据集中的时间戳差异(即两两时间戳之间的差值)。
- 计算差异数据的平均值和标准差。
- 分析误差来源,比如时钟偏差、信号传播延迟和处理延迟等。
- 根据分析结果,调整同步算法和参数,以优化同步精度。
具体精度分析的代码示例如下:
// 假设 reference_time_stamps 是参考时间戳数组
// target_time_stamps 是需要分析同步精度的目标时间戳数组
double average_error = 0.0;
double std_deviation = 0.0;
int N = reference_time_stamps.length;
for (int i = 0; i < N; i++) {
double error = target_time_stamps[i] - reference_time_stamps[i];
average_error += error;
}
average_error /= N;
for (int i = 0; i < N; i++) {
double error = target_time_stamps[i] - reference_time_stamps[i];
std_deviation += (error - average_error) * (error - average_error);
}
std_deviation = sqrt(std_deviation / N);
printf("Average Error: %f\n", average_error);
printf("Standard Deviation: %f\n", std_deviation);
通过上述分析,可以对同步精度进行量化评估,并通过优化算法和硬件设备配置,减少系统误差,提高时间戳同步的精度。
在本章节中,我们深入了解了时间戳获取技术和数据后处理方法,为实现准确的时间差定位打下了坚实的基础。通过这些技术,我们能够确保时间戳的准确性和时间差计算的精度,为后续章节中的算法实现和应用优化提供保障。
4. 时间差的算法计算
4.1 时间差计算理论基础
时间差(Time Difference of Arrival,TDOA)是定位技术中一个关键参数,它的精确计算直接影响定位的准确性。理解TDOA的理论基础是实现有效定位的前提。
4.1.1 时间差定义与测量方法
时间差是指一个信号在两个或多个接收点上到达的时间差异。为了测量时间差,首先需要对信号进行同步采样。在实践中,这通常是通过同步时钟或使用时钟同步技术来实现的。测量信号到达不同接收器的时间戳,然后计算两个时间戳之间的差值,就可以得到时间差。
时间差的测量通常分为两个步骤:时间戳的记录和时间差的计算。时间戳记录需要准确的时钟同步和快速的信号处理能力。时间差的计算则需要精确的算法来减小误差。
4.1.2 时间同步误差的来源与控制
时间同步误差主要是由于信号传播延迟和时钟偏差造成的。为了控制这些误差,我们需要考虑以下几个方面:
- 时钟同步技术:可以使用GPS时钟同步或网络时间协议(NTP)来同步多个接收器的时钟。
- 传播模型:建立准确的信号传播模型,以预测和补偿传播延迟。
- 误差估计和补偿:通过测量和统计分析,估计时间同步误差,并对时间差进行补偿。
4.2 时间差算法的实现与优化
在计算时间差时,算法的选择至关重要,它影响到计算的准确性以及系统的实时性能。
4.2.1 时间差估计算法
时间差估计算法有很多种,常见的包括:
- 互相关法 :通过计算两个信号的互相关函数来估计时间差。这种方法具有较高的时间分辨率。
- 能量检测法 :检测信号能量峰值以确定到达时间。这种方法计算简单,但对噪声敏感。
- 波达方向法(DOA) :结合角度和时间信息来估计时间差。
实现这些算法时,可以考虑在软件中使用数字信号处理技术。例如,在Keil开发环境中编写C代码,利用其浮点处理能力来提高时间差的计算精度。
4.2.2 算法精度提升策略
为了提高算法的精度,可以采取以下策略:
- 滤波处理 :应用低通滤波或带通滤波器来减少噪声影响。
- 参数优化 :通过实验和理论计算来调整算法参数,优化算法性能。
- 数据融合 :将不同算法的结果进行融合,利用它们各自的优势,提高时间差的估算精度。
为了在代码中展示如何实现这些策略,下面以互相关法为例,给出一个简化的代码示例,以及其背后的逻辑分析。
// 伪代码:互相关法计算时间差
// input_signal1, input_signal2: 接收到的两个信号样本数组
// N: 信号样本长度
// result: 时间差估算结果
void calculate_time_difference(float* input_signal1, float* input_signal2, int N, float* result) {
float max_correlation = 0;
int delay = 0;
// 通过滑动窗口计算互相关
for (int i = 0; i < N; ++i) {
float corr = 0;
for (int j = 0; j < N; ++j) {
if (i + j < N) {
corr += input_signal1[j] * input_signal2[i + j];
}
}
if (corr > max_correlation) {
max_correlation = corr;
delay = i;
}
}
// 计算时间差,通常需要将延迟转换为时间单位
*result = (float)delay / sampling_rate;
}
// 代码逻辑分析:
// 该函数通过滑动窗口的方式对两个信号进行互相关计算,寻找最匹配的窗口位置。
// max_correlation变量用于记录最大的互相关值,而delay变量记录该值对应的样本偏移。
// 最后,根据得到的延迟样本数和采样率将样本数转换为实际时间差。
上述代码段展示了如何用C语言实现互相关法来估算时间差。需要注意的是,在实际应用中,信号可能会受到各种噪声的影响,因此需要在算法实现时加入适当的数据滤波和参数优化步骤。此外,根据应用需求,还可以通过硬件加速如DSP或FPGA来进一步提升计算效率和精度。
5. 定位算法应用与用户界面
5.1 定位算法的原理与应用
定位技术是TDOA系统的核心,它直接关系到最终定位精度和用户体验。在众多的定位算法中,三角测量法和最小二乘法在TDOA系统中得到了广泛应用。
5.1.1 三角测量法的原理与实现
三角测量法是一种几何定位技术,它利用三个或三个以上信号接收点与目标源之间的距离差来确定目标源的位置。其基本原理是,已知三个点的位置和它们到目标点的距离差,就可以构成三个圆,这三个圆的交点就是目标点的位置。
为了提高计算的精度和效率,需要合理选择测量点并优化计算过程。在实现过程中,首先要测量出信号到达各个传感器的时间差,然后根据信号传播速度和已知的传感器位置计算出距离差。
// 伪代码示例:三角测量法计算
void calculatePositionByTriangulation() {
// sensorLocations: 已知的传感器位置数组
// timeDifferences: 测量到的时间差数组
Position targetPosition = calculateTargetPosition(sensorLocations, timeDifferences);
displayPosition(targetPosition);
}
Position calculateTargetPosition(Position[] sensorLocations, Time[] timeDifferences) {
// 实现三角测量计算的细节
// ...
return targetPosition;
}
5.1.2 最小二乘法在TDOA中的应用
最小二乘法是一种数学优化技术,它通过最小化误差的平方和寻找数据的最佳函数匹配。在TDOA中,最小二乘法可以用来根据时间差数据计算出最可能的目标位置,即使在存在测量误差的情况下。
最小二乘法的关键在于构建一个目标函数,该函数基于时间差数据和假定位置来计算误差。通过不断调整假定位置,直到误差函数最小,从而获得最佳估计位置。
// 伪代码示例:最小二乘法计算
void calculatePositionByLeastSquares() {
// initialGuess: 初始位置猜测
Position estimatedPosition = leastSquaresOptimization(initialGuess);
displayPosition(estimatedPosition);
}
Position leastSquaresOptimization(Position initialGuess) {
// 实现最小二乘法优化的细节
// ...
return estimatedPosition;
}
5.2 结果展示与用户界面设计
5.2.1 定位结果的图形化展示
用户界面应该直观地展示定位结果,图形化方法是最直观的方式之一。在设计时,可以采用地图叠加的方式来显示目标位置,通过不同颜色或标记区分不同的定位精度和状态。
例如,可以使用Web技术如HTML5和Canvas或SVG来绘制动态地图和标记。此外,为了适应不同的设备和分辨率,设计应保证响应式布局。
5.2.2 用户交互界面的设计要点
用户交互界面(UI)设计的核心是简洁、直观和易用性。在UI设计中,重要的是提供清晰的指示和反馈,确保用户可以轻松开始定位过程,了解当前进度,并获取结果。
为了提高用户体验,设计者需要考虑以下要点:
- 直观的操作按钮和菜单,方便用户执行操作
- 清晰的进度指示和状态消息,告知用户系统状态和预期的操作结果
- 优化响应时间,减少用户等待时间
- 提供帮助文档和常见问题解答(FAQ),以帮助用户快速解决问题
graph TB
A[开始定位] --> B[等待输入]
B --> C{检查输入有效性}
C -->|有效| D[执行定位]
C -->|无效| E[显示错误消息]
D --> F[获取结果]
F --> G[显示结果]
E --> B
G --> H{是否继续定位}
H -->|是| B
H -->|否| I[结束定位]
通过上面的流程图,可以清楚地表达用户通过UI进行定位操作的整个过程。在实际开发中,这个流程需要与后端逻辑紧密配合,确保所有步骤都能顺畅执行。
综上所述,定位算法的应用和用户界面设计是实现TDOA系统用户友好体验的关键环节。正确的算法选择和精确的实现能够提高定位精度,而合理的设计UI则能够提升用户满意度,保证用户能够轻松使用系统。下一章我们将讨论信号噪声与多径效应对定位精度的影响以及如何进行有效的处理。
简介:TDOA是一种利用时间差来确定目标位置的定位技术,在无线通信和物联网中得到广泛应用。Keil作为嵌入式开发工具,为实现TDOA提供了便利的开发环境。本文将详细介绍TDOA的基本原理以及如何在Keil环境中通过编写代码实现TDOA定位,包括信号处理、时间差计算和定位算法等关键步骤,并探讨在实际应用中如何优化算法和考虑外部因素。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 29
29 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)