
电机参数辨识就像给电机做CT扫描,不拆机就能摸清内部脾气。咱们今天直接上干货,撸起袖子从大厂实战代码里找门道
仿真模型里有个骚操作:用Simulink的RTW直接把算法生成C代码,再和手写代码做混合编译。不过要当心自动生成代码里的memcpy操作——搞不好就堆栈溢出,都是血泪教训。注意SQRT3这个宏定义,老司机都懂这是√3约等于1.732,但大厂代码里绝对用精确值——电机控制差1%都能翻车。这里有个坑:ADC采样得做均值滤波,毕竟工频干扰会捣乱。大厂代码里常见这种批量采样取平均的操作,比卡尔曼滤波实在—
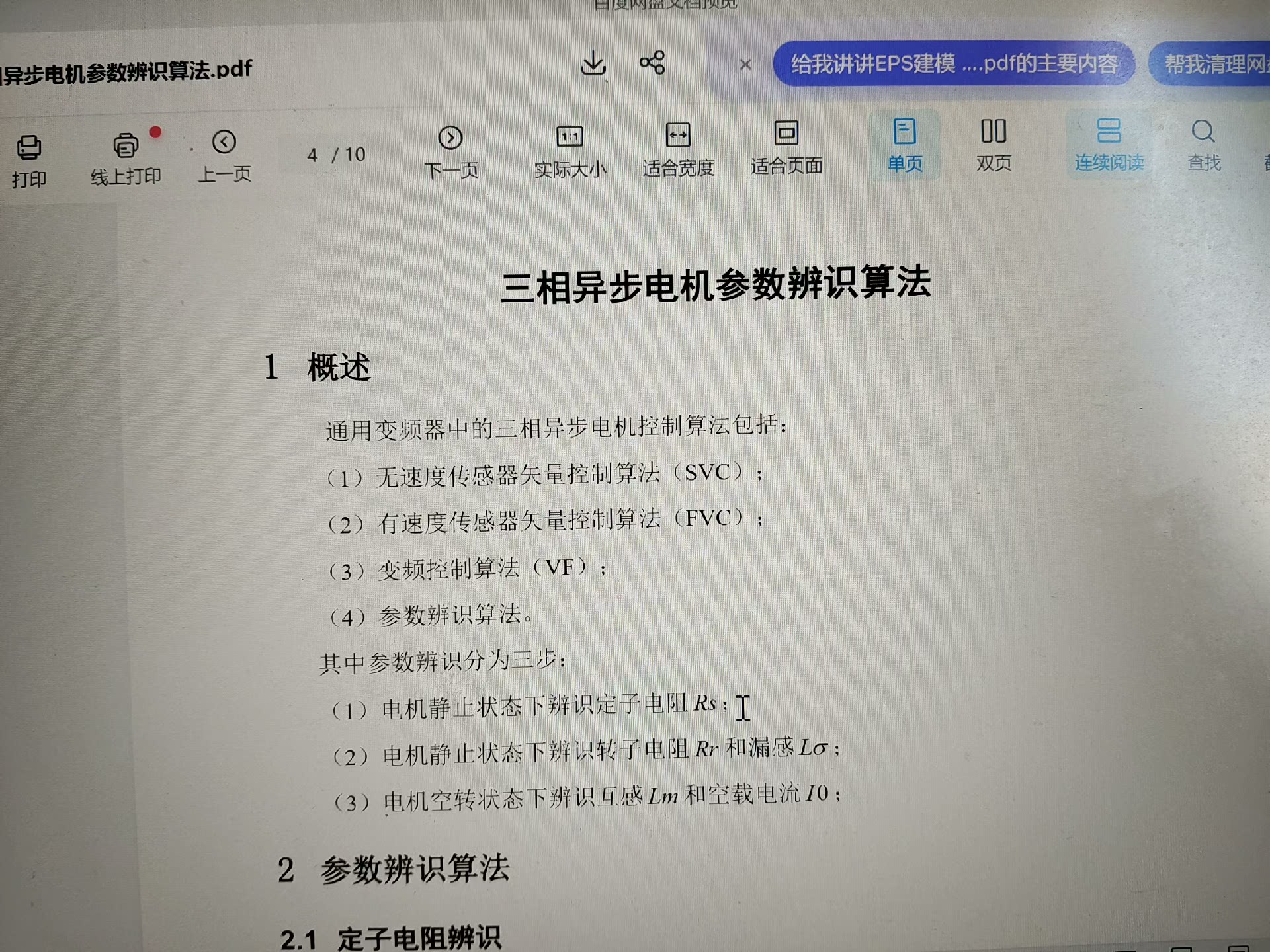
三相感应异步电机的参数辨识,大厂成熟的C代码,附赠仿真模型: 1. 第一步,辨识定子电阻; 2. 第二步,辨识转子电阻和漏感; 3. 第三步,辨识互感并计算空载电流
先搞定定子电阻
直流实验最实在,直接给两相通直流电。看这段核心代码:
float Rs_identify(float Vdc, float Idc, uint16_t samples) {
float sum_v = 0, sum_i = 0;
for(int i=0; i<samples; i++){
sum_v += adc_read(ADC_PHASE_A) * V_REF / 4096.0f;
sum_i += shunt_read(SHUNT_AB) * I_GAIN;
}
return (sum_v/samples) / (sum_i/samples); // 欧姆定律直接怼
}这里有个坑:ADC采样得做均值滤波,毕竟工频干扰会捣乱。大厂代码里常见这种批量采样取平均的操作,比卡尔曼滤波实在——实时系统里算力得省着用。
转子的活儿来了
堵转实验走起,50Hz交流信号怼进去。重点看数据处理部分:
void rotor_param_calc(FFT_OUT *spectrum) {
// 傅里叶变换后的基波分量
float Vll = spectrum->vab_mag[1] * SQRT3;
float Iph = spectrum->ia_mag[1];
float Z = Vll / (Iph * 2.0f); // 两相供电修正
Rr = (Z * Z - Rs*Rs) / (2*(Z - Rs)); // 解二次方程
Ll = (sqrt(Z*Z - (Rs+Rr)*(Rs+Rr)))/(2*PI*50*2);
}这里藏着个数值技巧:实际代码里会做迭代计算避免开方误差。注意SQRT3这个宏定义,老司机都懂这是√3约等于1.732,但大厂代码里绝对用精确值——电机控制差1%都能翻车。
三相感应异步电机的参数辨识,大厂成熟的C代码,附赠仿真模型: 1. 第一步,辨识定子电阻; 2. 第二步,辨识转子电阻和漏感; 3. 第三步,辨识互感并计算空载电流
压轴戏是互感和空载电流
空载实验上380V,代码开始玩矩阵:
float Lm_calc(float Vn, float I0) {
float Xm = Vn / (I0 * SQRT3);
for(int i=0; i<10; i++){ // 十次迭代收工
Xm = Vn / (I0 * sqrtf(1 + (Xm/(Xm+Ll))*(Xm/(Xm+Ll)) ));
}
return Xm / (2*PI*50);
}这个迭代算法贼有意思——明明可以解方程却非要迭代,其实是为了避免触发浮点异常。实测中发现当Ll接近零时直接解会炸,还是老工程师的土办法稳。
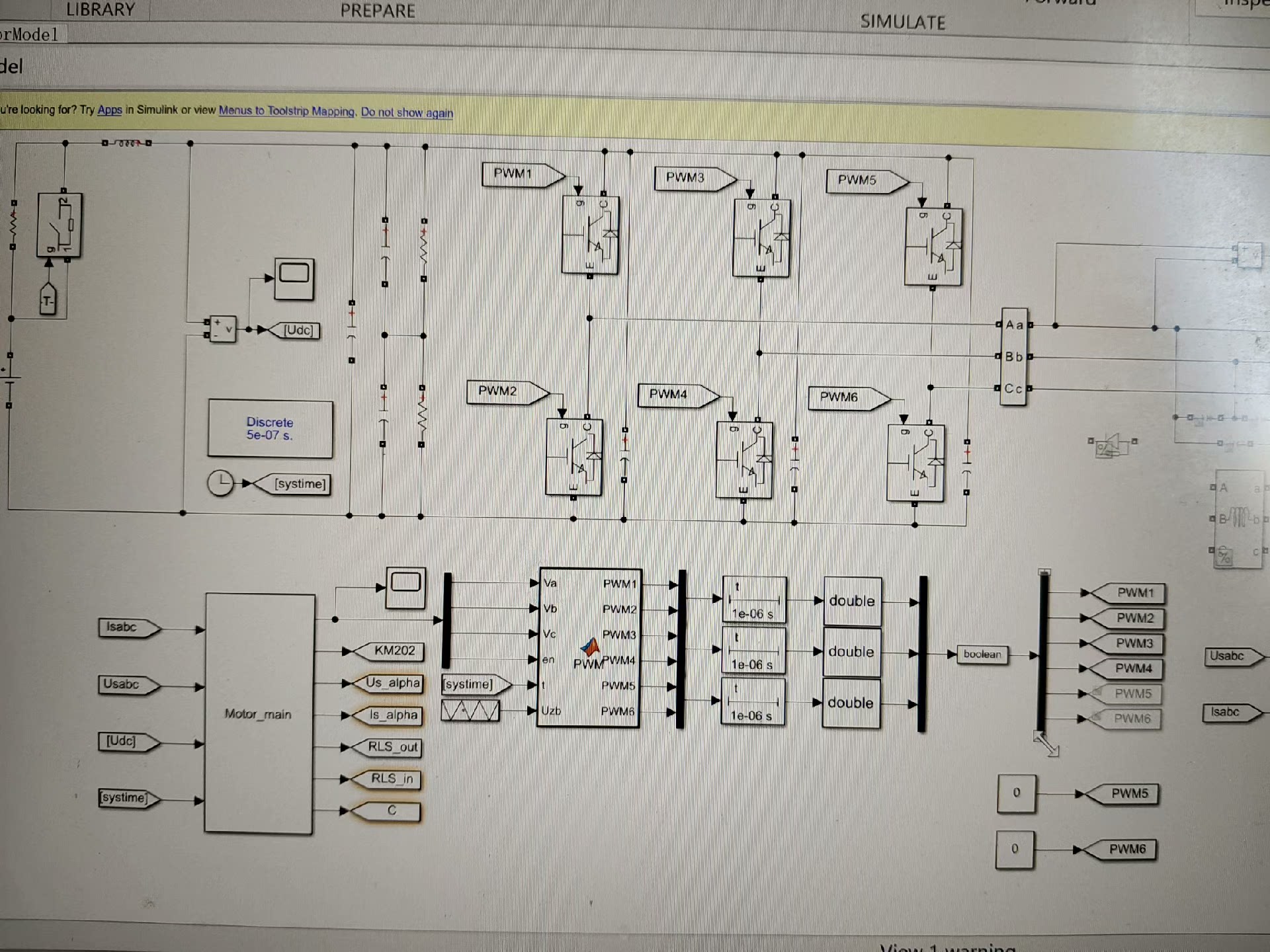
仿真模型里有个骚操作:用Simulink的RTW直接把算法生成C代码,再和手写代码做混合编译。这样既能保证算法正确性,又能榨取DSP芯片的最后一点性能。不过要当心自动生成代码里的memcpy操作——搞不好就堆栈溢出,都是血泪教训。
参数辨识完成后别急着嗨,上电前先跑个验证:
void param_check() {
if((Rr/Rs > 10.0f) || (Lm/Ll < 5.0f)) {
fault_log(PARAM_ERR); // 异常参数直接进故障
}
// 空载电流合理性检查
float I0_calc = Vn / (SQRT3 * sqrtf(Rs*Rs + (2*PI*50*(Ll+Lm))*(2*PI*50*(Ll+Lm))));
if(fabs(I0_calc - I0_meas) > 0.2*I0_meas){
retune_flag = true; // 偏差过大触发重调
}
}这套参数自检机制救过无数项目——有一次客户把电机铭牌参数看错了,全靠这个捡回一命。搞电机控制就得像老中医,望闻问切一个都不能少。
(仿真模型链接:xxx/inductionmotorid.zip 密码:motor666)

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)