
openvela 技术揭秘(一):从单任务循环到多线程抢占
本文面向操作系统初学者,旨在用最简单易懂的方式,带您探索计算机是如何从一次只能做一件事,演进到能够同时处理多个任务的。我们将一起揭开多线程、中断和上下文切换这些核心概念的神秘面纱。
读完本文,您将理解:
-
• 为什么现代操作系统需要多线程?
-
• 什么是中断?它如何让 CPU 变得“耳聪目明”?
-
• “上下文切换”究竟切换的是什么?它如何实现任务的“无缝衔接”?
一、程序如何运行:CPU 的基本工作原理
想象一下,计算机的大脑是一个非常勤奋但头脑简单的工人,我们通常称它为中央处理器(CPU)。它的工作就是严格按照一本“指令”手册来干活。
在很多我们身边的电子设备中,比如智能手环、遥控器等,这个“大脑”通常是一个高度集成的芯片,叫做微控制器单元(MCU,Microcontroller Unit)。你可以把 MCU 看作一个迷你电脑,它把 CPU 核心、存放指令的代码存储 (Code) 和存放临时数据的内存 (RAM) 都集成在了一起。
无论是通用的 CPU 还是集成的 MCU,要让它工作,都离不开这几样东西:
-
• 指令 (Code):告诉处理器下一步该做什么。
-
• 数据 (Data):处理器在工作中需要读写的原材料。
-
• 寄存器 (Registers):处理器自带的“高速口袋”,用于临时存放正在处理的指令地址或数据。
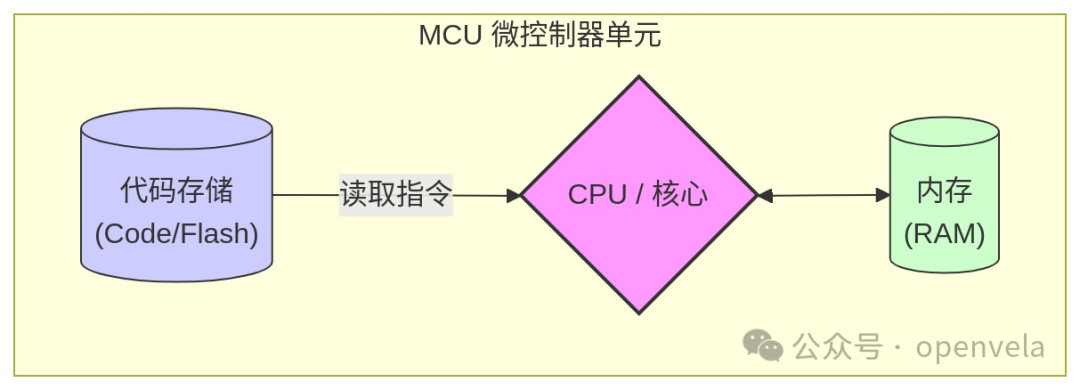
它的工作流程非常朴素:MCU/CPU 从代码存储中取出一条指令,执行它,再取出下一条,周而复始。 这就是程序运行的最基本形态。
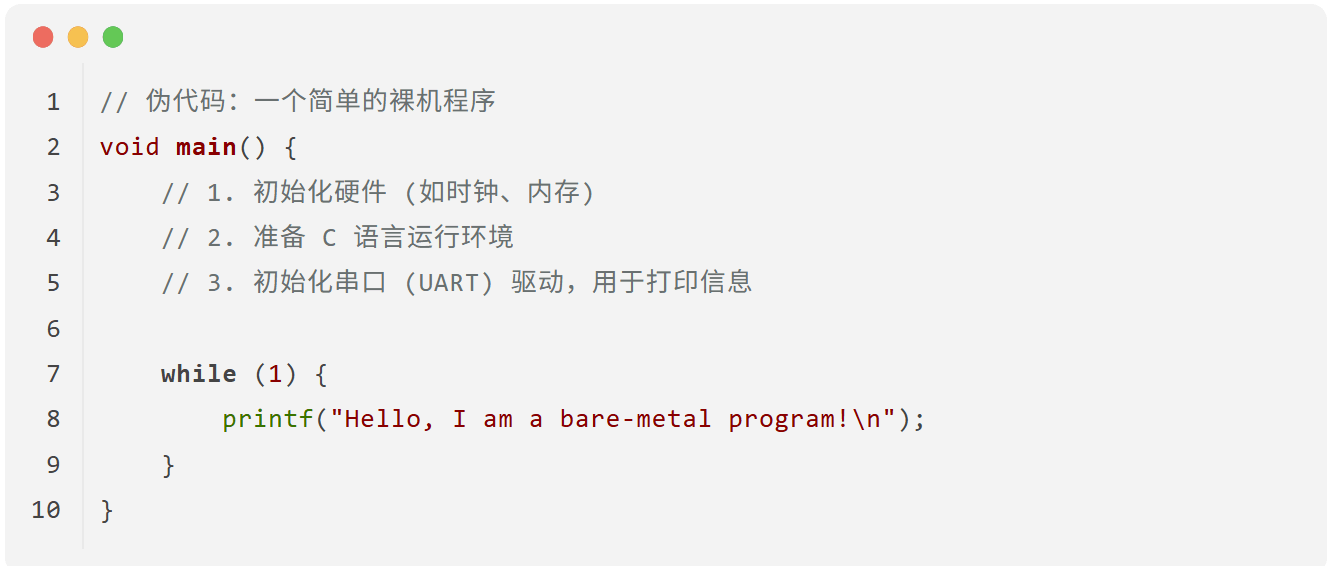
二、最初的尝试:在裸机上运行单个任务
在没有操作系统的硬件上直接运行程序,我们称之为“裸机”(Bare-metal)编程。一个最简单的裸机程序,可能就是一个无限循环:
如果觉得打印太快,我们可能会想让 CPU “等一等”。但在没有操作系统的情况下,我们没有 sleep() 这样的函数。最直接的办法是让 CPU 做一些无用功来消耗时间,这被称为“忙等待”(Busy Wait)。
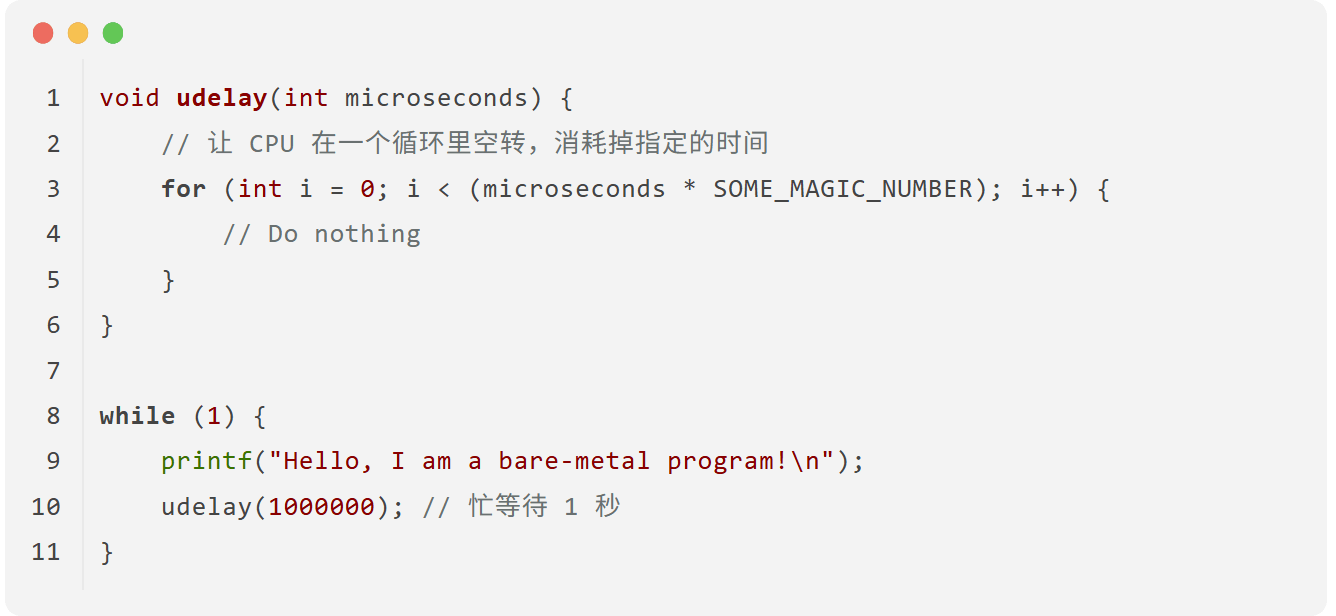
关键问题:这种方式虽然能“慢下来”,但 CPU 始终在 100% 运行,非常耗电且低效。
三、向多任务迈进:朴素的超级循环
现在,我们的裸机程序不再满足于只做一件事了。假设我们希望它能同时闪烁一个 LED 灯,并且检测一个按键是否被按下。
最直观的想法,就是把这些任务在 while(1) 循环里一个接一个地执行。这种结构在嵌入式领域通常被称为“超级循环”(Super-loop)。
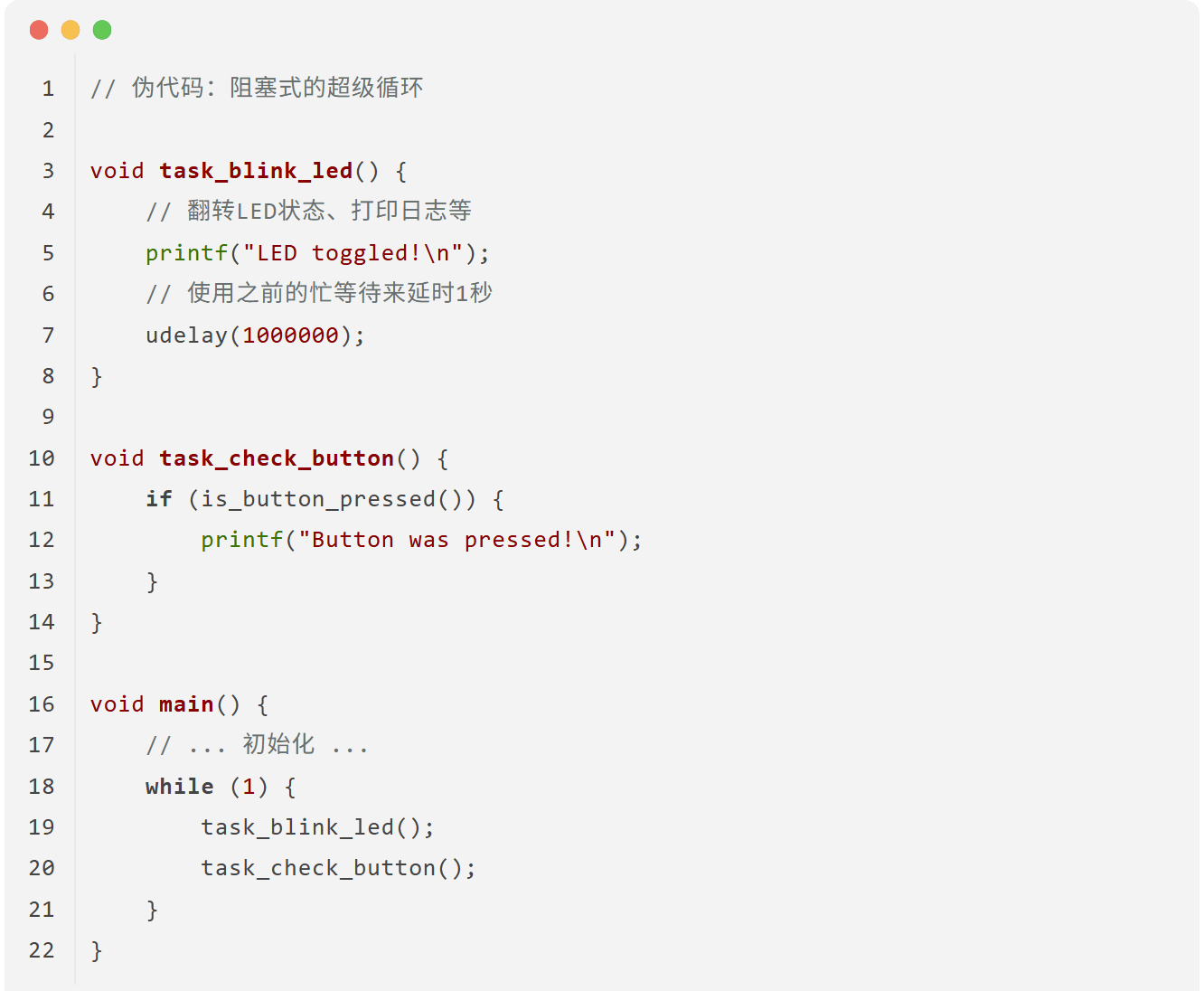
1、最初的尝试:阻塞式轮询
我们把每个任务写成一个函数,然后在主循环里依次调用它们:
这种方式简单直接,但很快就会暴露出致命问题:
关键问题:
1. 阻塞 (Blocking):
task_blink_led()函数包含了一个长达 1 秒的延时udelay()。在这 1 秒内,CPU 被完全占用,task_check_button()根本没有机会执行。这意味着,用户必须在 LED 恰好熄灭或点亮的那一瞬间按下按键,才有可能被检测到,这几乎是不可能的。整个系统响应变得极慢。2. 无优先级:即使有些任务更紧急(比如处理用户输入),它们也必须乖乖排队,等待前面的任务执行完毕。
3. CPU 持续空转:无论是执行有效任务还是在
udelay中空转,CPU 始终是 100% 繁忙的,效率极低。
2、改进:合作式调度(非阻塞)
为了解决“阻塞”问题,我们需要转变思想:任何任务都不应该长时间霸占 CPU。
每个任务都应该被拆分成许多微小的步骤,执行一小步后立刻返回,把 CPU 控制权“让”给其他任务。这就像一个懂礼貌的团队,每个人都主动“合作”,而不是一个人累倒。这种模式也常被称为“状态机”。
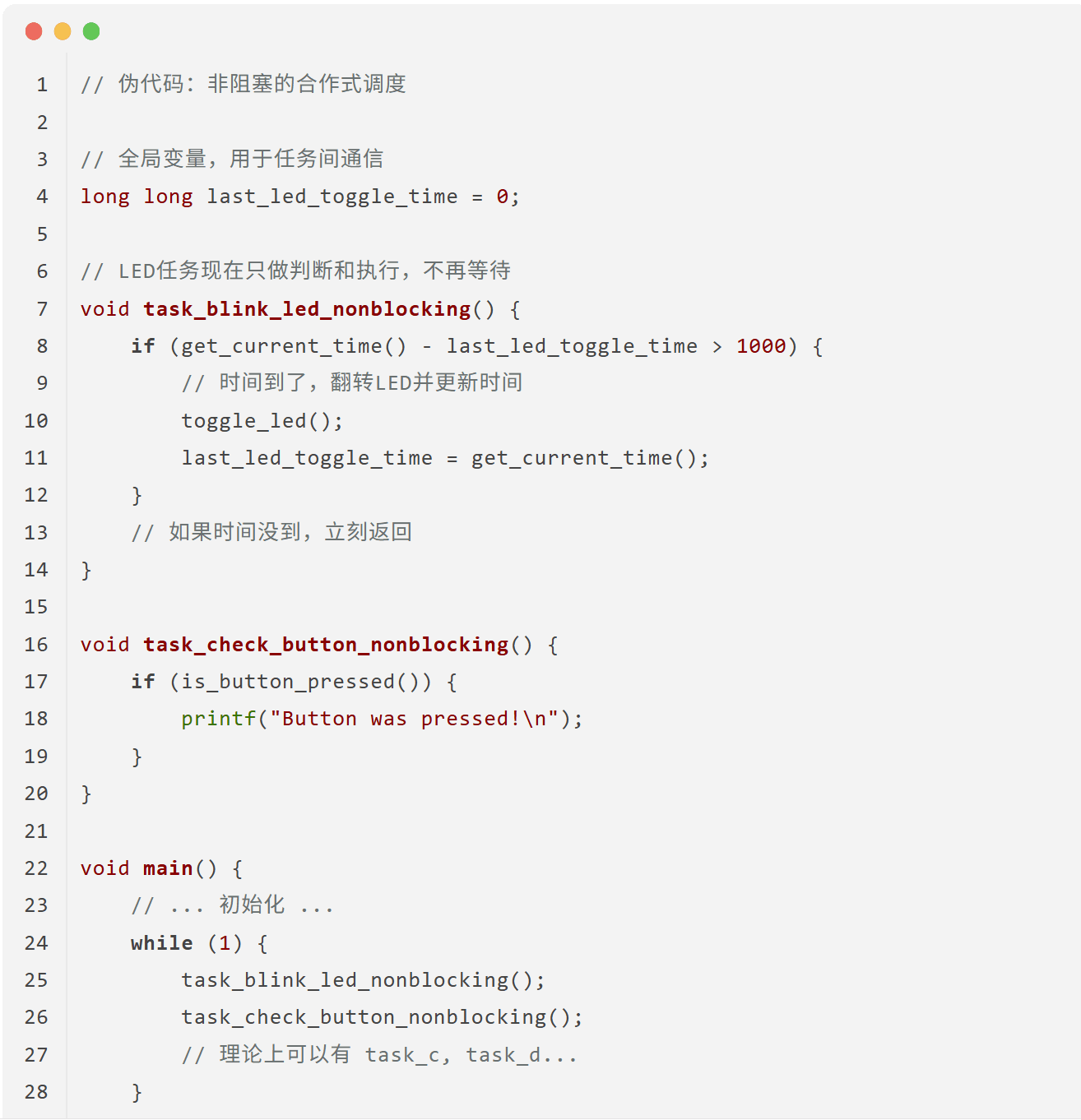
优点:
-
• 解决了阻塞问题!
task_blink_led不再有udelay,它每次被调用时只是检查一下时间,如果不满足条件就立刻返回,让task_check_button有机会执行。系统的响应性大大提高。
新的缺点:
-
1. 仍然没有抢占:如果某个任务(比如
task_c)是一个复杂的计算,需要花费很长时间,那么它依然会阻塞其他所有任务。高优先级的任务(如按键处理)仍然无法“插队”。 -
2. CPU 仍在空转:当所有任务都没什么可做时(LED还没到翻转时间,用户也没按键),
while(1)循环还在疯狂地执行,一遍遍地调用每个任务函数,做着无意义的检查。 -
3. 任务必须“自觉”:这种模式的成败,完全依赖于程序员的自觉,必须保证每个任务都不能执行太久。一个“不守规矩”的任务就会拖垮整个系统。
引出的核心矛盾: 我们希望系统在有事做的时候能快速响应,没事做的时候能停下来休息以节省功耗。
那么,当所有任务都没准备好时,我们能在
while(1)的最后加上sleep()吗?
sleep()多久合适呢?
• 睡得太久,会错过下一个需要处理的事件(比如用户按下了按键)。
• 睡得太短,和不睡差别不大,依然在频繁唤醒、检查、继续睡,浪费能源。
我们需要一种机制,让 CPU 能够一直睡,直到有事件发生时再被唤醒。
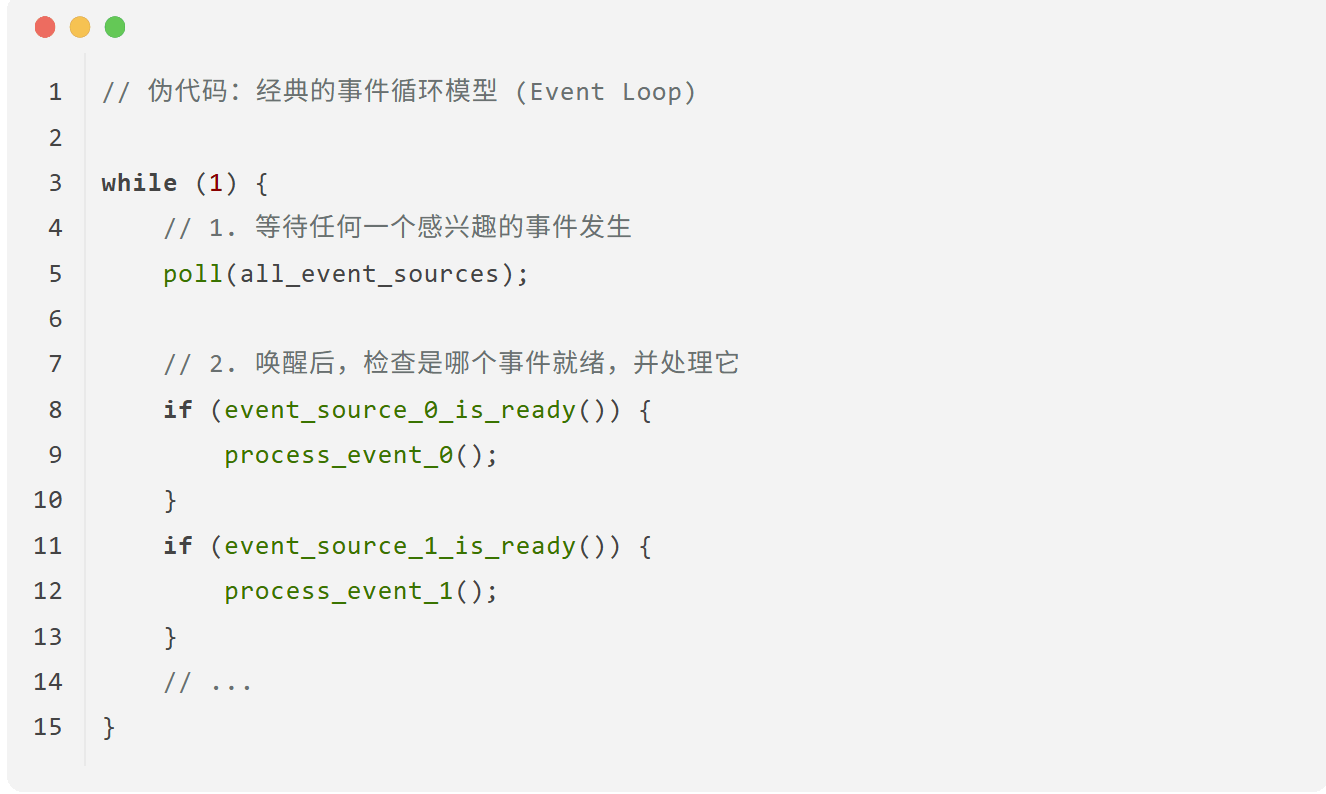
3、通向最终答案:事件驱动模型
这个矛盾并非无解。在现代操作系统和像 libuv 这样的高级库中,早已有了非常成熟的解决方案。其核心思想可以用这段经典伪代码来表示:
让我们来剖析这个模型的精髓:
-
•
poll(all_event_sources):这是整个模型的心脏。它不再是让 CPU 在while循环里空转,而是执行一个特殊的“等待”操作。这个操作会告诉系统内核:请把我挂起(暂停),直到我关心的这些事件源(all_event_sources)中有任何一个发生了事情。在我等待期间,请让 CPU 去休眠或服务其他程序。 -
• 唤醒与处理:当某个事件(比如网络数据到达、定时器到期)真的发生了,系统会“唤醒”这个
poll函数。程序从poll返回后,继续往下执行,检查到底是哪个事件发生了,并调用相应的处理函数。
这个模型优雅地解决了之前的所有问题:CPU 不再空转,实现了高效的等待;系统响应及时,因为任何一个事件的发生都能立刻唤醒程序。
从 poll 到裸机
现在,我们把这个完美的思想应用到我们的裸机环境中。
在裸机里,我们没有操作系统内核,也没有“文件描述符(fd)”,但我们有它们的硬件等价物:
| 概念 (OS/高级库) | 对应概念 (裸机硬件) |
|---|---|
|
事件源 (Event Source) |
硬件模块
(如定时器、GPIO、UART串口) |
|
等待 |
CPU休眠指令
(如 ARM 的 |
|
事件发生,唤醒 |
硬件中断信号 |
所以,上面那个经典的事件循环,在我们的裸机世界里,就“翻译”成了这样:
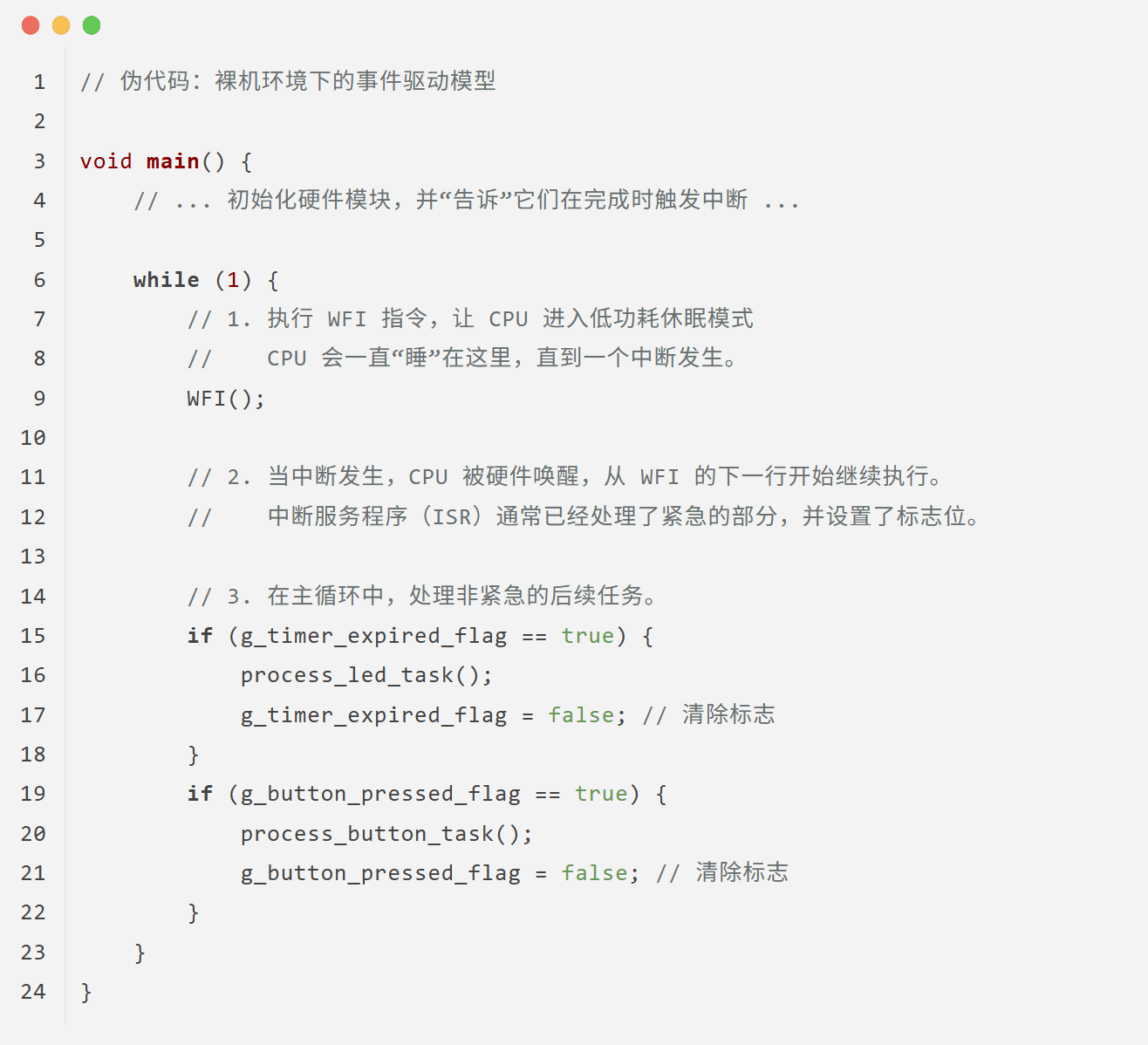
这个最终形态引出了两个终极的硬件问题,也正是我们即将揭晓的答案:
-
1. CPU 如何“休眠”? -> 通过
WFI指令。 -
2. 谁来唤醒沉睡的 CPU? -> 一个独立于 CPU 正常执行流程之外的硬件信号。
这个能“打断”CPU 当前状态(无论是沉睡还是正在执行其他代码),强制它去处理紧急事件的硬件机制,就是我们接下来要隆重介绍的主角—中断 (Interrupt)。
四、中断:唤醒沉睡 CPU 的关键
我们已经明确了目标:让 CPU 在空闲时通过 WFI 指令休眠,并在事件发生时被唤醒。但谁来扮演这个“叫醒服务”的角色呢?答案是一个由硬件直接支持的强大机制——中断(Interrupt)。
1、什么是中断
中断:是 CPU 响应系统中发生的某个异步事件时的一种机制。它会暂停当前正在执行的任务,保存工作状态,然后跳转去处理该事件。处理完成后,再精确地返回到刚才暂停的地方,恢复状态,继续执行。
这个定义可能有些抽象,让我们用一个经典的例子来理解它:
想象你正在专心阅读一本书(CPU 在执行主程序),这时门铃突然响了(一个硬件事件,如按键按下)。
-
• 暂停与标记:你不会立刻把书扔掉。你会记住你读到了第几页第几行,或者插上一枚书签(CPU 保存上下文)。
-
• 处理事件:你起身去开门,看看是谁,并处理相应的事情(CPU 跳转执行中断服务程序 ISR)。
-
• 返回与继续:事情处理完后,你回到座位,根据书签找到原来的位置,继续阅读(CPU 恢复上下文,返回主程序)。
整个过程无缝衔接,你既没有错过门口的紧急事件,也没有丢失看书的进度。中断,就是这样一个由硬件保障的、高效的事件处理流程。
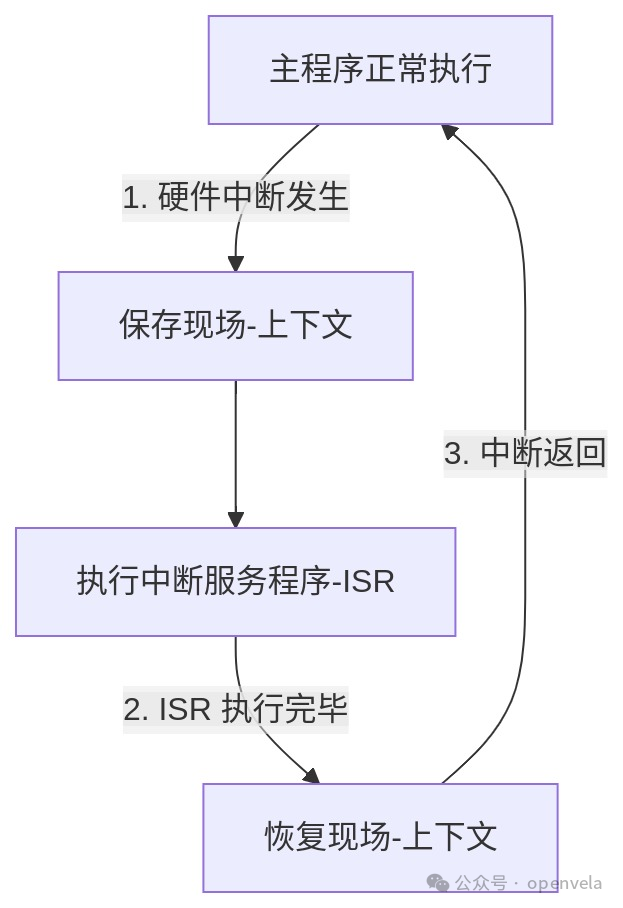
2、中断的执行流程
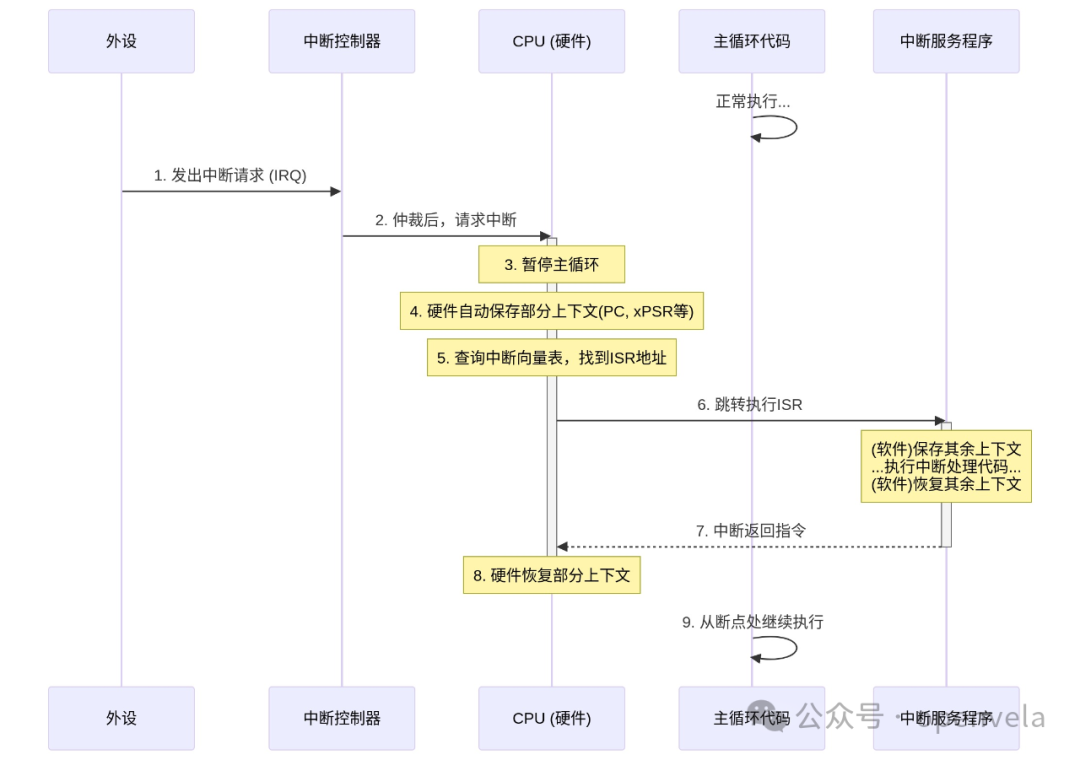
这个“接电话”的过程,在硬件和软件层面是一场精确的协同工作。其详细步骤如下:
-
1. 中断请求 (IRQ):一个外设(如 UART 串口)完成了它的工作(比如收到了一个数据字节),便向中断控制器(如 ARM Cortex-M 中的 NVIC) 发出一个“我需要关注”的信号。
-
2. 仲裁与派发:中断控制器像一个总调度员,它根据这个中断请求的优先级,决定是否要打扰 CPU。
-
3. CPU 响应:在执行完当前指令后,CPU 会检查中断控制器的信号。一旦发现有合法的请求,它就会暂停当前任务。
-
4. 上下文保存 (硬件):CPU 会自动将程序计数器(PC)、状态寄存器等核心现场信息压入当前任务的栈中。这个动作由硬件完成,以确保速度和原子性。
-
5. 查找处理函数:CPU 从中断控制器得知是哪个中断源触发了事件(即“中断号”),然后以此为索引,在中断向量表中找到对应的处理函数地址。这张表就像一个预设的紧急联系簿。
-
6. 跳转至 ISR:CPU 跳转到该地址,开始执行为该中断编写的中断服务程序(ISR)。为确保 ISR 不会“污染”主程序的运行环境,程序员通常会在 ISR 的开头,用软件手动保存一些可能会用到的通用寄存器。
-
7. 执行中断处理:在这里,我们执行真正的事件处理代码。这里有一条黄金法则:保持 ISR 简短、快速。因为在 ISR 运行时,更低优先级的中断是被屏蔽的,过长的 ISR 会降低整个系统的响应能力。
-
8. 上下文恢复:ISR 的结尾,软件手动恢复第 6 步保存的通用寄存器。
-
9. 中断返回:执行一条特殊的中断返回指令,CPU 硬件会自动从栈中弹出第 4 步保存的核心现场,程序指针(PC)指回被打断的地方,主程序继续执行,仿佛一切都未曾发生。
3、 中断驱动的新模型
有了中断,我们的 while(1) 循环终于可以安心地休眠了。基于中断,我们演化出两种典型的编程模型。
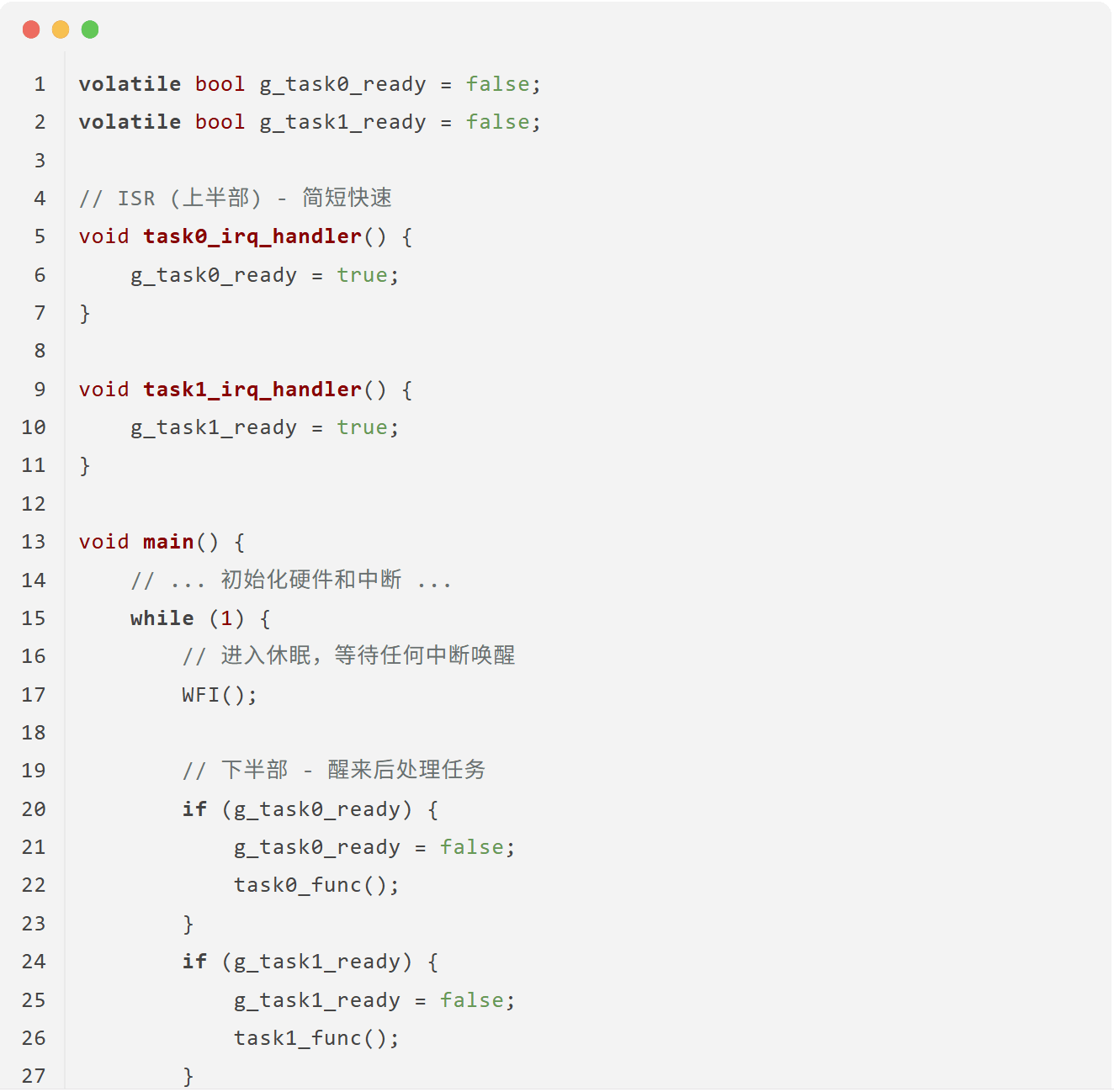
模型 1:ISR 置位标志,主循环处理(推荐范式)
这是嵌入式系统中最稳健、最常用的架构,它将中断处理清晰地分为“上半部”和“下半部”。
-
• 上半部 (Top-Half):即 ISR,只做最紧急的事:清除中断标志、读取数据、设置一个全局标志位,然后迅速退出。
-
• 下半部 (Bottom-Half):即主循环,在被
WFI唤醒后,轮流检查这些标志位,执行那些不那么紧急、但可能更耗时的业务逻辑。
模型 2:在 ISR 中完成所有工作(应避免)
这个模型将所有任务逻辑都放在 ISR 里。
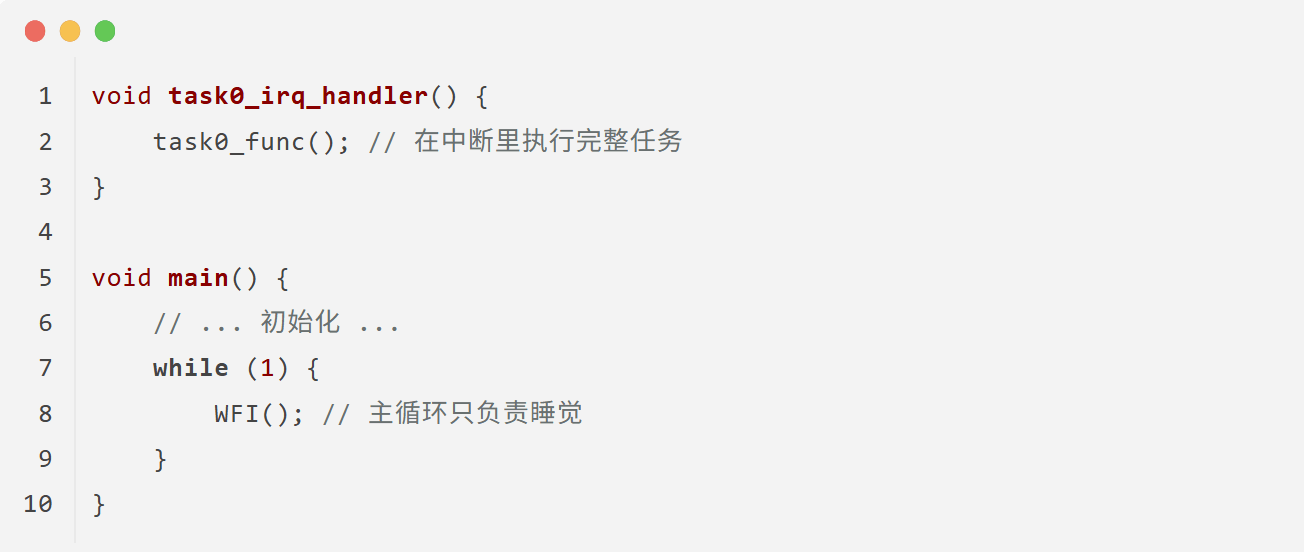
为何模型 1 是更优的选择? 因为系统的实时性取决于对最高优先级事件的响应速度。如果在一个冗长的 ISR(如模型 2 的 task0_irq_handler)中执行时,一个更紧急的中断(如电源掉电)发生,系统将无法及时响应。因此,保证 ISR 的短小是保证系统稳定可靠的基石。
4、新的挑战
中断机制极大地提升了系统的效率和响应能力,但当我们试图用它来构建一个更复杂的系统时,一系列新的、更高维度的问题也随之浮现:
-
1. 高优先级任务被阻塞:在主循环的
if-else结构中,任务的执行顺序是固定的。一个高优先级的任务,即使被中断唤醒,也可能要排队等待一个低优先级的长任务执行完毕。我们实现了中断抢占,但主循环中的任务逻辑仍然是顺序执行,无法抢占。 -
2. 编程模型不直观:为了使用中断,我们不得不将一个线性的业务逻辑(如
读取->处理->发送)拆散成状态机和标志位,这让代码变得复杂和难以维护。 -
3. 缺乏公平调度:当有多个同优先级的任务准备就绪时,简单的
if判断无法保证它们能公平地分享 CPU 时间。 -
4. 系统脆弱:所有任务都在一个共享的地址空间中运行,没有隔离。一个任务的 bug(如死循环、栈溢出)足以让整个系统崩溃。
我们解决了一个底层问题,却引出了一系列上层应用层面的挑战。这些关于任务调度、抢占、同步与通信、资源管理的复杂问题,已经超出了简单 while(1) + 中断所能优雅处理的范畴。
是时候引入一个专业的“系统管家”了。这,正是实时操作系统(RTOS)将要登场的舞台。
五、RTOS 的核心:多线程与上下文切换
我们终于来到了 RTOS 的大门前。前文遇到的任务优先级错乱、编程模型复杂等一系列问题,都将被这个新引入的“系统管家”所解决。而 RTOS 施展魔法的核心技巧,就是多线程(Multithreading)。
1、多线程,究竟多了什么
当我们说“多线程”时,并不仅仅指有多个任务函数。while(1) 里的多个 if 分支也像是多个任务,但它们共享着同一个运行环境。多线程的精髓在于,每个线程都拥有自己独立的运行环境,当它们之间切换时,彼此的运行状态不会互相干扰。
这个独立的运行环境,在操作系统中被称为上下文(Context)。
让我们通过一个具体的例子来理解“上下文”到底是什么。假设我们有两个线程,task0 和 task1:
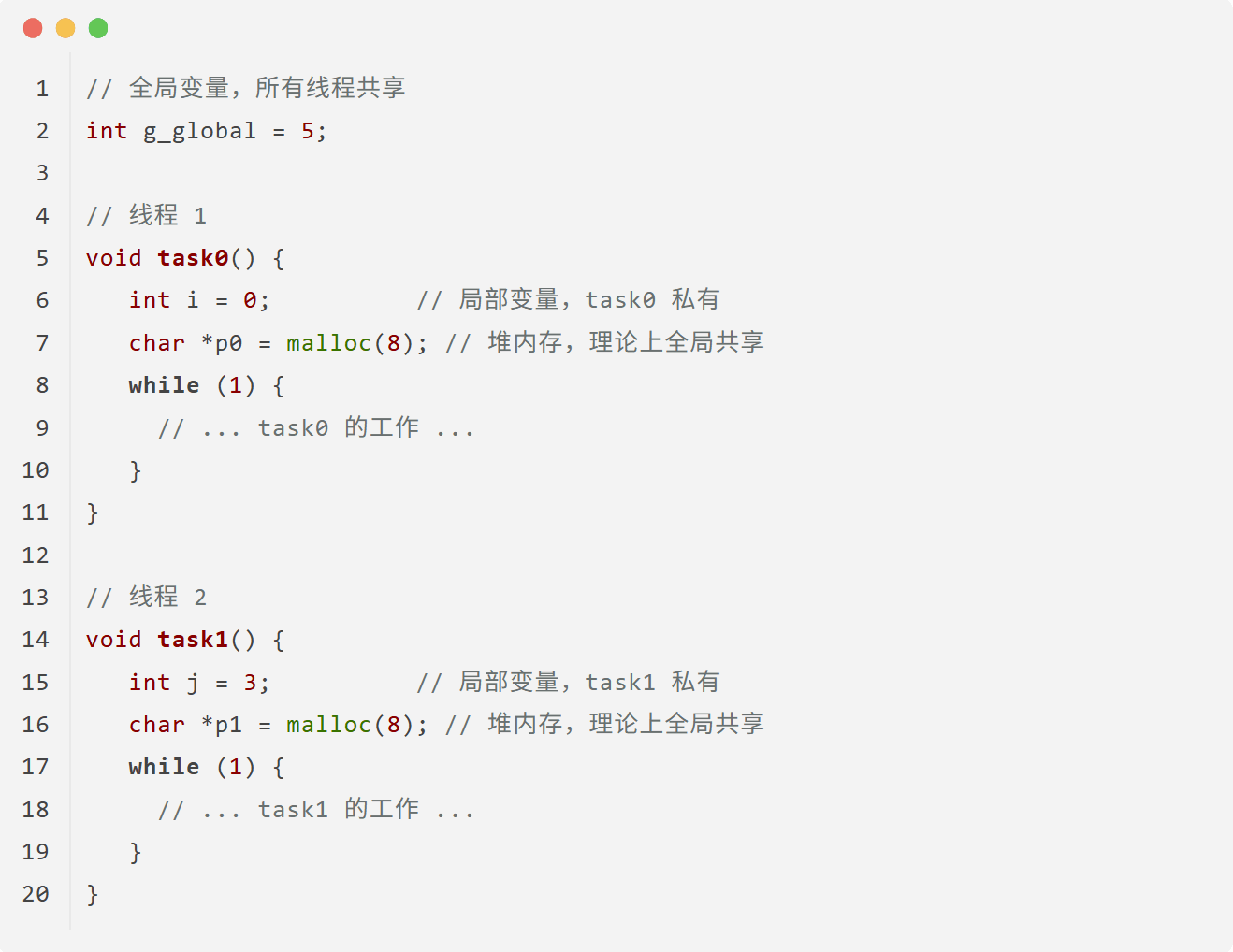
当操作系统决定将 CPU 从 task0 切换给 task1 时,需要保存哪些东西,才能在未来切回 task0 时让它完美续上呢?
-
• 保存代码?不需要。代码段是只读的,所有线程共享。
-
• 保存全局变量
g_global?不需要。它不属于任何一个特定线程,是公共财产。 -
• 保存堆(Heap)内存?不需要。
malloc分配的内存由内存管理器统一管理,属于全局资源池。 -
• 保存局部变量
i,j?需要!i是task0的私人财产,j是task1的。它们通常存储在各自的栈(Stack)上。所以,每个线程必须有自己独立的栈空间。
最关键的是,CPU 在那一瞬间的“思维状态”——寄存器。这包括:
-
• 通用寄存器:存放着计算的中间结果。
-
• 程序计数器 (PC):记录着下一条要执行的指令地址(即“我执行到哪里了”)。
-
• 栈指针 (SP):指向当前线程的栈顶。
-
• 特殊寄存器:如浮点运算寄存器 (FPU) 等。
结论: 线程的上下文,本质上就是 CPU 核心寄存器集合的快照。每个线程真正独有的私有财产,是它自己的栈空间,以及在被换出时保存在栈上的那份上下文副本。
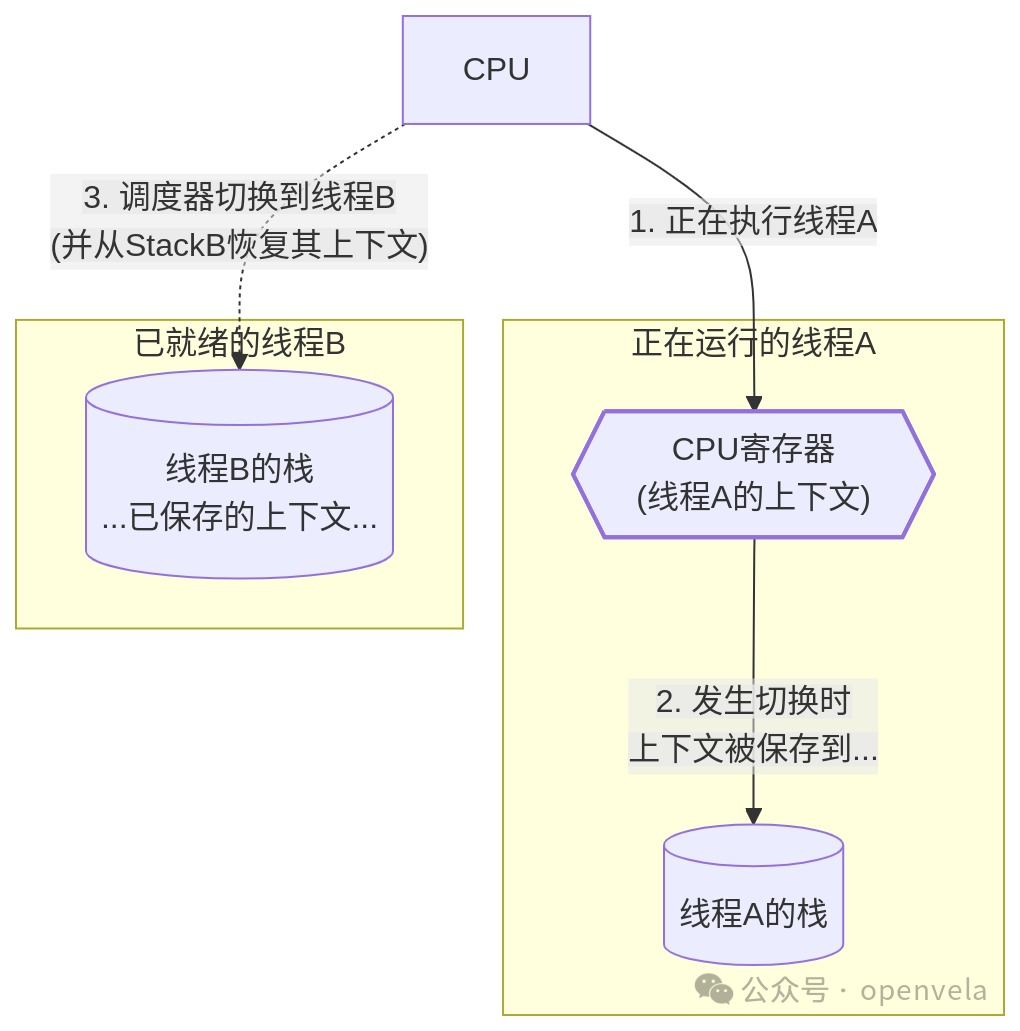
2、上下文切换流程
上下文切换(Context Switch) 就是 RTOS 调度器执行的“换人”操作。它远比普通的中断处理要复杂,因为中断返回时是回到同一个任务,而上下文切换后是去执行一个全新的任务。
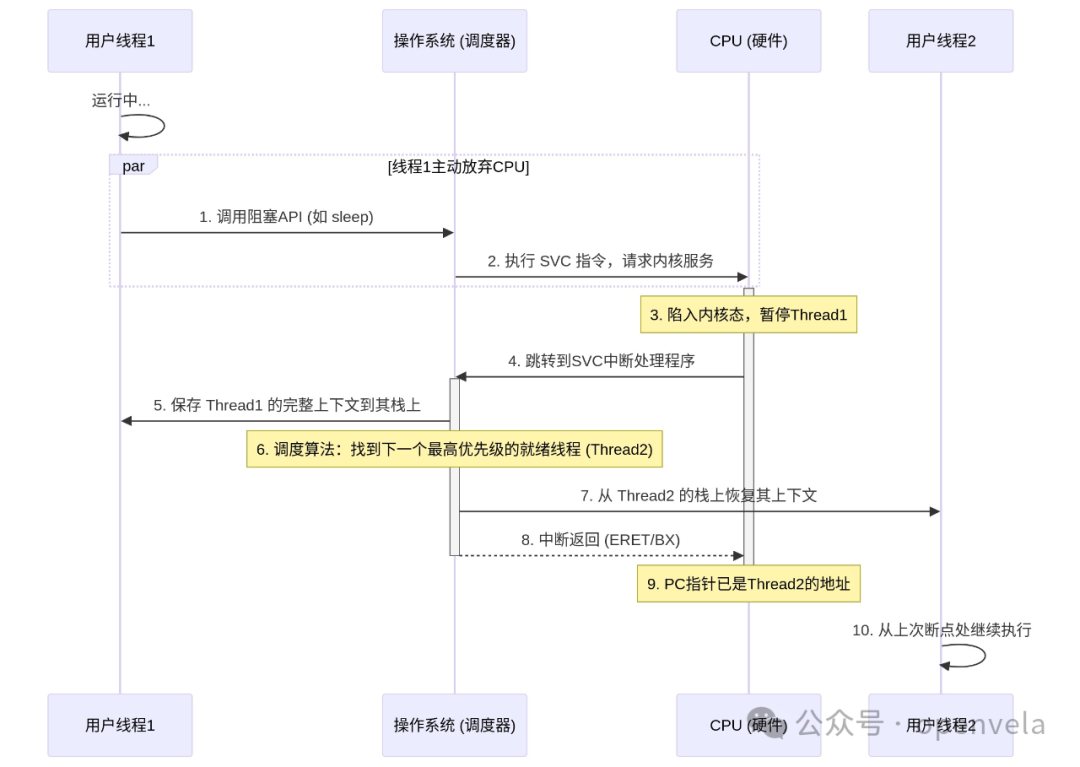
现代 RTOS 通常将这个核心操作统一在中断处理流程中完成,以确保原子性和一致性。一个典型的(由线程主动发起的)切换流程如下:
-
1. 发起切换:
Thread1在执行中调用了wait()或sleep()等会引起阻塞的 API。 -
2. 陷入内核:这个 API 会通过一条软件中断指令(如 ARM 架构的
SVC)请求操作系统服务。这是受控地从用户态进入内核态的“官方通道”。 -
3. CPU 响应:CPU 暂停
Thread1,跳转到SVC中断的处理入口。 -
4. 保存旧上下文:RTOS 调度器开始工作。它首先将
Thread1的完整上下文(所有需要保存的寄存器)保存到Thread1的私有栈上。 -
5. 寻找新任务:调度器根据调度算法(如优先级),找到下一个最应该运行的线程,即
Thread2。 -
6. 切换栈指针:调度器将 CPU 的栈指针(SP)指向
Thread2的私有栈。(可能先切换到中断栈,再操作,保证安全) -
7. 恢复新上下文:调度器从
Thread2的栈上,恢复Thread2上一次被换出时保存的上下文到 CPU 的寄存器中。 -
8. 中断返回:执行中断返回指令。此时,由于 PC、SP 等所有寄存器都已经是
Thread2的了,程序会从Thread2上次被中断的地方,继续执行下去,仿佛什么都没发生过。
对于 CPU 而言,它只是感觉执行了一次中断;但对于用户程序而言,执行流已经神奇地从一个函数“跳”到了另一个函数。
3、切换时机:主动让出与被动抢占
上下文切换的发生,分为两种情况:
主动切换(Cooperative)
线程自己调用 sleep(), wait(), sched_yield() (主动让出) 等 API,自愿放弃 CPU。这是一种协作式的调度,需要线程“自觉”。
被动切换(Preemptive)
这才是保证系统实时性的关键。切换由外部硬件中断触发,不由当前运行的线程决定,实现了“抢占”。
我们来看一个经典场景:一个低优先级的日志线程(LOG)正在运行,此时一个高优先级的音频线程(AUDIO)需要的数据已经由 DMA 准备好了。
-
1.
LOG线程正在while(1)中运行。 -
2. DMA 控制器完成数据传输,触发一次硬件中断。
-
3. CPU 立即暂停
LOG线程,跳转到 DMA 的中断服务程序(ISR)。 -
4. 在 ISR 中,驱动程序唤醒了正在等待数据的
AUDIO线程(例如通过post一个信号量)。 -
5. ISR 返回前,调度器介入检查。它发现一个更高优先级的
AUDIO线程已经就绪。 -
6. 调度器立即决定进行上下文切换:保存
LOG的上下文,恢复AUDIO的上下文。 -
7. 中断返回后,CPU 开始执行的是高优先级的
AUDIO线程,而不是回到之前的LOG线程。
如果没有被动切换(抢占)会怎样? 如果系统不支持抢占,那么即使 AUDIO 线程被唤醒,它也必须等到 LOG 线程主动放弃 CPU 后才能运行。如果 LOG 线程是一个忙等循环,AUDIO 线程将永远无法执行,导致严重的实时性问题(如音频卡顿)。
实战剖析:模拟器中的“假”中断与 API 的演进
-
• 模拟抢占:在 PC 上的仿真环境(SIM)中,模拟真实的硬件中断非常困难。早期的仿真器没有中断抢占,导致一个现象:一个低优先级的
while(1)忙等循环,能“饿死”一个高优先级的 Shell 线程。解决方案是引入CONFIG_SIM_WALLTIME_SIGNAL,它利用宿主机的定时器,周期性地向仿真进程发送signal。仿真进程捕获这个signal,并在signal的处理函数中执行一次调度,从而模拟了“时钟节拍中断(Tick)”,强制实现了抢占。 -
• 统一切换:在早期的 openvela 版本中,主动切换(直接调用汇编)和被动切换(在中断中处理)的实现是分开的。这导致维护困难,常常改了一处忘了另一处。因此,在后续的迭代中,主动切换也被统一为通过触发软中断
SVC来进入中断路径完成,确保了所有上下文切换都走同一套核心代码,大大提升了系统的一致性和可维护性。
4、保护共享资源:临界区与调度锁
多线程带来了并行的便利,也带来了访问冲突的风险。当多个线程需要访问同一个资源(如一个全局变量、一个外设)时,必须进行保护。RTOS 提供了不同粒度的保护机制:
-
• 禁止/允许调度 (
sched_lock()/sched_unlock())-
• 作用:在这对函数之间,调度器不会进行线程切换。
-
• 特点:它只是“劝告”调度器不要换人,但并不能阻止硬件中断的发生。ISR 依然会执行。这是一种较轻量级的锁,用于保护不希望被其他线程打断的短小代码片段。
-
-
• 临界区 (
enter_critical_section()/leave_critical_section())-
• 作用:在单核 CPU 上,这通常通过关闭全局中断来实现。
-
• 特点:这是最强的保护。一旦进入临界区,不仅线程切换被禁止,所有(可屏蔽的)硬件中断也都被屏蔽了。这能保证一小段代码的绝对原子性,但必须极快地执行并退出,否则会严重影响系统响应。
-
-
• 自旋锁 (
spin_lock_irqsave()/spin_unlock_irqrestore())-
• 作用:在多核系统中,它能防止其他核心同时进入临界区;在单核系统中,其效果等同于临界区(关中断)。
-
• 核心原则:持有任何一种锁,尤其是在临界区内,绝不能执行任何可能引起休眠或阻塞的操作(如
sleep,wait),否则极易导致系统死锁。
-
开发者视角:API 与底层实现
在单核 CPU 上,
enter_critical_section()和spin_lock_irqsave()这两组 API 的最终效果是等价的,它们都依赖于底层的关中断操作,通常由up_irq_save()/up_irq_restore()这样的函数实现。尽管功能上等价,但我们应该尽量使用
enter_critical_section或spin_lock这样更高级别的抽象,而不是直接调用up_irq_save。因为上层 API 语义更清晰,且具备更好的可移植性。
5、 线程是越多越好吗
既然线程这么好用,我们是不是该为每个功能模块都创建一个线程?比如一个音频播放器 decoder + resample + filter + output,是否应该创建 4 个线程?
答案是:否定的。线程并非“免费的午餐”,其数量需要权衡。
-
• 开销增加:每个线程都需要独立的栈空间,消耗宝贵的 RAM。上下文切换本身也需要消耗 CPU 时间。
-
• 同步复杂:线程越多,它们之间需要同步和通信的地方就越多,使用的锁、信号量也越多,增加了代码复杂度和死锁的风险。
-
• 维护困难:过多的线程会让系统的数据流和控制流变得难以追踪和调试。
合理的线程设计是一种艺术。通常,我们会将功能内聚、耦合度高的模块放在一个线程里,而为独立的、需要并行执行或有不同实时性要求的功能创建不同的线程。例如,将 decoder 和 resample 放在一个线程,而将 output(与硬件直接交互)放在另一个高优先级线程中,可能是一种更优的设计。
6、隔离的边界:从线程到进程
多线程为我们提供了任务隔离的初步手段,每个线程关心自己的逻辑。但这层隔离非常薄弱,因为在大多数 MCU 的 RTOS 中:
-
• 所有线程共享同一个内存地址空间。
-
• 一个线程的非法内存访问(如数组越界、野指针)可以轻易地破坏另一个线程的数据,甚至内核本身,导致整个系统崩溃。
为了实现更强的隔离,操作系统引入了进程(Process)的概念。不同操作系统对进程和线程的实现和隔离程度有很大差异,尤其取决于是否存在内存管理单元(MMU)。
下面这个表格清晰地展示了 openvela (无 MMU) 和 Linux (有 MMU) 的区别:
| 系统 | 进程 | 同一进程内的线程 | API |
|---|---|---|---|
| openvela (无MMU) |
地址空间共享 |
FD 共享 |
进程:task_create线程: pthread_create |
| Linux (有MMU) | 地址空间不共享
|
FD 共享 |
进程:fork线程: pthread_create |
从表中可以看出:
-
• 在有 MMU 的 Linux 系统上,进程拥有独立的虚拟地址空间,实现了硬件级别的内存隔离,一个进程崩溃不会影响其他进程,健壮性极高。
-
• 而在没有 MMU 的 openvela 上,“进程”是一个“软”概念。
task_create创建的“进程”和pthread_create创建的“线程”仍然共享同一个物理地址空间。它们的主要区别在于资源所有权(如文件描述符表是否独立)的划分,隔离性远弱于 Linux 进程。
六、RTOS 的内存基石:线程栈、中断栈与 Idle 栈
上一章我们了解到,每个线程的独立性来自于它私有的上下文,而这个上下文就保存在它自己的栈上。在 RTOS 中,栈的管理是一门必修课,它直接关系到系统的稳定性和内存使用效率。一个典型的 RTOS 环境中,主要存在三种不同角色的栈。
1、线程栈
这是我们最熟悉的栈。系统中的每一个线程(或任务)都必须拥有一个独立的栈空间。
-
• 作用:
-
• 存储函数调用时的局部变量、参数和返回地址。
-
• 在线程被切换出去时,用于保存其完整的上下文(CPU 寄存器快照)。
-
-
• 来源:线程栈的内存从哪里来?通常有两种方式:
-
• 由调用者提供 (静态/预分配):开发者预先分配一块内存(例如一个全局数组,位于
.data或.bss段),然后将其地址和大小传递给线程创建函数。-
1. openvela API:
task_create_with_stack() -
2. POSIX API:
pthread_create(),需在pthread_attr_t属性中设置stackaddr字段。
-
-
• 由系统动态分配:调用者只指定需要的栈大小,由操作系统在创建线程时从堆(Heap)中
malloc一块内存作为线程栈。-
1. openvela API:
task_create() -
2. POSIX API:
pthread_create(),pthread_attr_t属性中的stackaddr字段为NULL。
-
-
-
• 挑战:为线程分配合理大小的栈是嵌入式开发中的一个经典难题。栈太小会导致“栈溢出”,这是最隐蔽也最致命的 bug 之一;栈太大则会浪费宝贵的 RAM 资源。
2、Idle 线程与 Idle 栈
每个 RTOS 都有一个特殊的“空闲线程” (Idle Thread),它也被认为是系统中的“最后一个线程”。
-
• 作用:当就绪队列中没有任何用户线程可以运行时,调度器就会选择 Idle 线程来执行。它标志着 CPU 当前“无事可做”。
- • 特性:
-
• 最低优先级:Idle 线程的优先级总是被设置为系统中的最低级,确保任何一个用户线程只要就绪,就能立即抢占它。
-
• 永不阻塞:Idle 线程是一个永不休眠、永不等待任何资源的
while(1)循环。因此,绝不允许在 Idle 线程中调用wait/sleep等任何可能引起阻塞的 API。 -
• 节能:一个设计良好的 Idle 线程并不会在
while(1)中空转浪费 CPU,而是会执行WFI(Wait For Interrupt) 这样的指令,让 CPU 进入低功耗的睡眠状态,直到下一次硬件中断将其唤醒。
-
-
• Idle 栈:作为系统启动后创建的第一个线程(在 openvela 中,由
nx_start函数演变而来),Idle 线程同样需要自己的栈空间。这个栈通常不大,且为了保证系统最基本的功能可以运行,它和中断栈一样,都是通过链接脚本在编译时就静态分配好的。
3、中断栈 (Interrupt Stack)
这是一个非常关键但容易被忽视的概念。
-
• 问题:想象一个场景,一个线程 A 的栈空间只剩几十个字节了,此时突然发生一个中断。中断服务程序(ISR)本身也需要栈空间来运行,如果这个 ISR 嵌套层级较深或定义了较大的局部变量,它压栈时就会轻易地“踩过界”,摧毁线程 A 的栈数据,导致系统在中断返回后行为异常甚至崩溃。
-
• 解决方案:为了彻底隔离中断处理和线程执行,RTOS 引入了中断栈。这是一个系统级的、所有中断共享的、独立的栈空间。
-
• 工作模式:
-
• 使用独立中断栈 (推荐):通过配置项(如
CONFIG_ARCH_INTERRUPTSTACK=2048)启用并指定大小。当任何硬件中断发生时,CPU 在执行 ISR 之前,会先自动(或由内核辅助)将栈指针(SP)切换到这个预留的中断栈。中断处理完成后,再切回原来的线程栈。 -
• 复用被中断的线程栈:如果配置项为
CONFIG_ARCH_INTERRUPTSTACK=0,系统将不设独立的中断栈。中断发生时,ISR 会直接使用当前被中断线程的栈。
-
-
• 优势:使用独立中断栈的好处是巨大的。它使得计算每个线程的栈大小时,无需再考虑最坏情况下中断嵌套所需的栈空间,大大简化了栈大小的估算,并从根本上杜绝了中断压栈“踩坏”线程栈的风险,极大地提升了系统稳定性。与 Idle 栈一样,中断栈也是一块静态预留的内存,必须在链接脚本中明确为其指定位置和大小。
七、疑难解析:深入调度与上下文细节
本章我们以问答的形式,解答一些关于 RTOS 内部机制的常见深度问题,帮助您将理论知识与具体的代码实现联系起来。
Q1: 中断是不是只有一个单独的栈空间,所有任务和线程都共用?
答:这个问题可以分解为三个清晰的要点:
-
1. 线程栈是私有的:每个线程(Task 或 Thread)都有自己独立的栈,它们之间不共享。这是线程独立运行的基础。
-
2. 中断栈是唯一的(如果启用):当系统配置了独立中断栈时(例如,通过
CONFIG_ARCH_INTERRUPTSTACK配置),这个中断栈在整个系统中只有一个。所有的硬件中断(无论中断源是什么,也无论当时哪个线程正在运行)在响应时,都会切换到这同一个中断栈上进行处理。它是一个系统级的公共安全区。 -
3. 这是可配置的:开发者可以根据项目需求,选择是否启用独立中断栈。
-
1. 启用 (主流选择):这是绝大多数项目的推荐做法。它能从根本上杜绝中断处理“踩坏”线程栈的风险,极大地提升了系统稳定性,并简化了开发者对每个线程栈大小的估算。
-
2. 不启用(复用线程栈):当中断发生时,中断服务程序会直接使用当前被中断线程的栈。这种方式可以节省一块静态分配的 RAM,但它将中断嵌套可能导致的栈溢出风险转嫁给了每个线程,对线程栈大小的估算要求变得极为苛刻和复杂。
-
Q2: 以 ARMv8-M 架构为例,硬件不是会自动压栈吗?为什么 exception_common 这样的中断入口函数里还需要对 R2, R3 等寄存器进行操作?
答:这个问题触及了硬件和软件协同完成上下文切换的核心。
首先,您说得对,ARM Cortex-M 架构的 CPU 硬件在响应异常(包括中断)时,会自动将一部分寄存器(如 xPSR, PC, LR, R12, R3-R0)压入当前线程的栈中,这被称为“硬件自动保存的上下文”。
但是,这并不完整!一个线程的完整上下文还包括 R4-R11 等通用寄存器以及 BASEPRI 等特殊功能寄存器。硬件只做了“一半”的工作,剩下的一半必须由操作系统在中断处理函数中通过软件来完成。
在 exception_common 这样的通用异常处理入口,您看到的对 R2, R3 等寄存器的操作,并非是重复压栈,而是巧妙地利用这些已被硬件保存的寄存器作为“临时工”,去完成保存“另一半”上下文的工作。
例如:
-
• 在进入
exception_common时,R2和R3的原始值已经被硬件安全地保存在了栈上。 -
• 此时,软件代码可以放心地覆盖
R2和R3的当前值,用它们来执行保存任务。比如,用R2来读取并暂存BASEPRI寄存器的值,用R3来获取正确的栈指针地址(R13/SP)。 -
• 然后,软件再将
R4-R11以及R2,R3中暂存的BASEPRI等值,一并存入到线程栈上预留的完整上下文区域。
所以,这些指令是软件保存上下文流程的一部分,是完成完整上下文切换所必需的步骤,而非硬件行为的冗余。
Q3: 调度器的时间片轮转(Round-Robin)是如何实现的?
答:时间片轮转是为了保证相同优先级的多个线程能够公平地分享 CPU 时间,防止一个“劳模”线程永久霸占 CPU,而“饿死”同级的其他线程。
其核心实现非常巧妙,可以概括为一次**“出队再入队”**的操作,具体流程如下:
-
1. 时钟中断触发:系统的时钟节拍中断(Tick)周期性地发生。在时钟中断的 ISR 中,当前运行线程的时间片计数器会减一。
-
2. 时间片耗尽:当一个线程的时间片耗尽时(计数器减到 0),调度器会启动一次 round-robin 调度,例如调用
nxsched_process_roundrobin()。 -
3. 重新排队:这个函数会调用更底层的
nxsched_reprioritize_rtr(),其核心逻辑是(正如您的笔记所描述):-
• 将当前这个时间片耗尽的线程,从它所在优先级的就绪队列的头部移除 (
rm task from ready queue)。 -
• 再将它添加到同一个优先级就绪队列的尾部 (
add task to ready queue 同优先级Task的后面插入)。
-
-
4. 切换到新线程:完成重新排队后,调度器会自然地选择当前优先级队列头部的新线程来执行。
通过这个简单的“队头拿到队尾”的操作,就保证了该优先级下的所有线程都能轮流获得执行机会,实现了公平调度。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐
 0
0 0
0- 0



 已为社区贡献186条内容
已为社区贡献186条内容

所有评论(0)