
MPU6050DMP库的移植和使用
/ q30格式,long转float时的除数.解释如下在MPU6050 DMP输出的四元数等数据时,使用的是q30格式,即实际值 = 原始整数值 / 2^30。这样做的目的是用整数来表示高精度的小数,便于嵌入式系统高效处理,避免浮点运算。2的30次方(1073741824)是因为用30位来表示小数部分,范围和精度都比较合适。这两个函数配合使用,将3x3方向矩阵(如)转换为DMP初始化时需要的方向标
-
下载方法

- motion driver_6.12 是从invensense网站上下载的最新的DMP库。
- Motion Driver是传感器驱动程序层的嵌入式软件堆栈,可轻松配置和利用InvenSense运动跟踪解决方案的许多功能。
- 支持的运动设备为MPU6050 / MPU6500 / MPU9150 / MPU9250。
- 硬件和板载数字运动处理器(DMP)的许多功能都封装在可以使用和引用的模块化API中。
- Motion Driver设计为一种可轻松移植到大多数MCU的解决方案。
- Motion Driver 6.0包括一个用于ARM MCU和TI-MSP430的9轴解决方案。
- 仅6轴解决方案应继续参考运动驱动程序5.1.2,以便更容易理解软件。
使用到的文件
inv_mpu.c实现了与MPU交互的基本功能,如读写寄存器inv_mpu_dmp_motion_driver.c: 实现了与DMP交互的功能,包括:写入DMP固件到MPU、初始化、数据处理。dmpmap.hDMP寄存器映射的定义dmpKey.hDMP 寄存器映射和键值定义inv_mpu.h头文件inv_mpu_dmp_motion_driver.h: 头文件
文件路径

移植
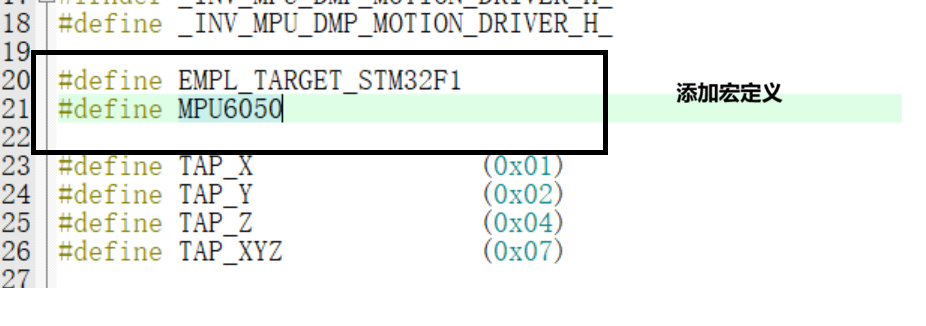
需要修改的只有inv_mpu.c、inv_mpu.h和inv_mpu_dmp_motion_driver.c,在inv_mpu_dmp_motion_driver.h中添加宏定义
inv_mpu.h

inv_mpu.c
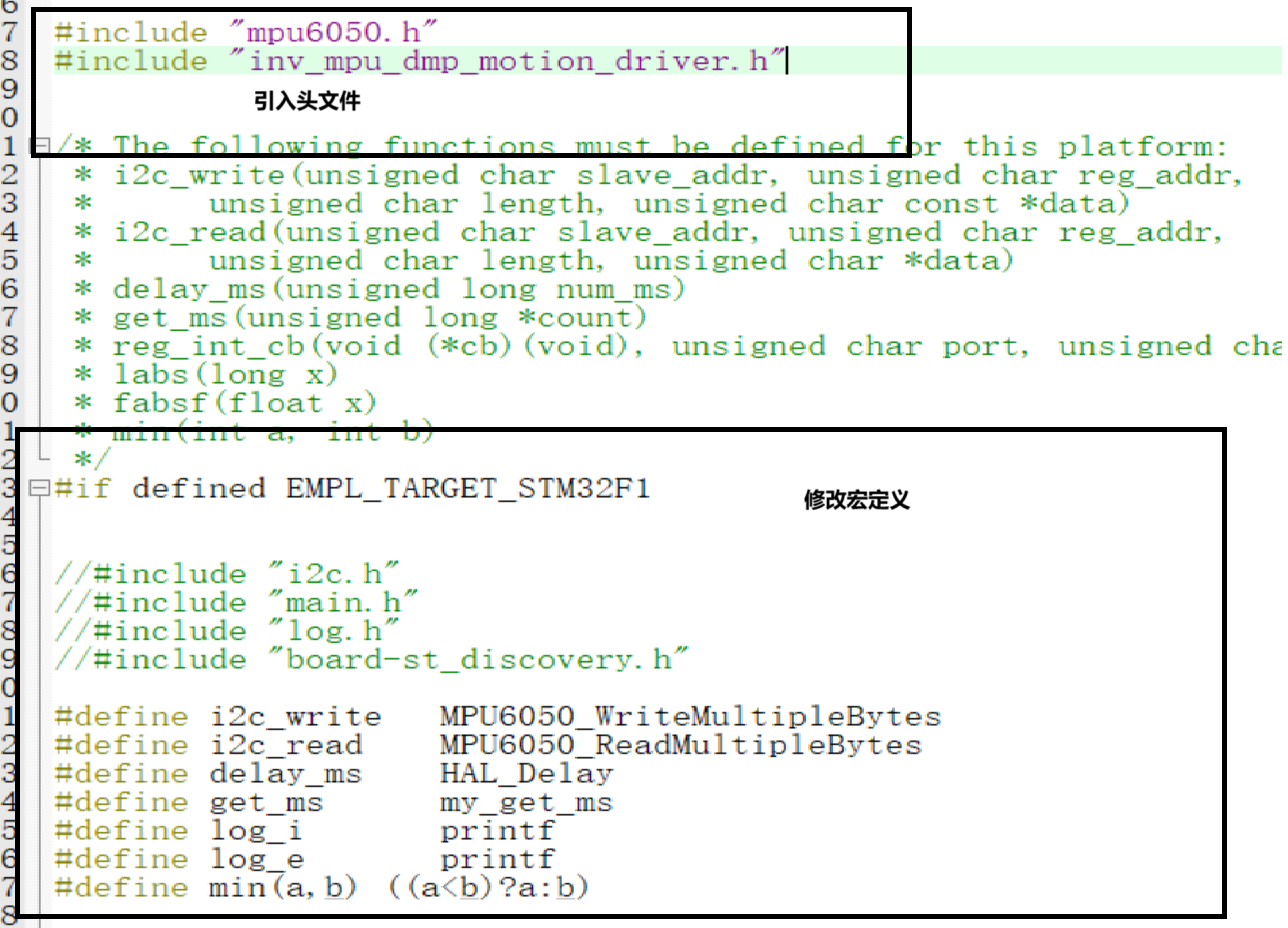
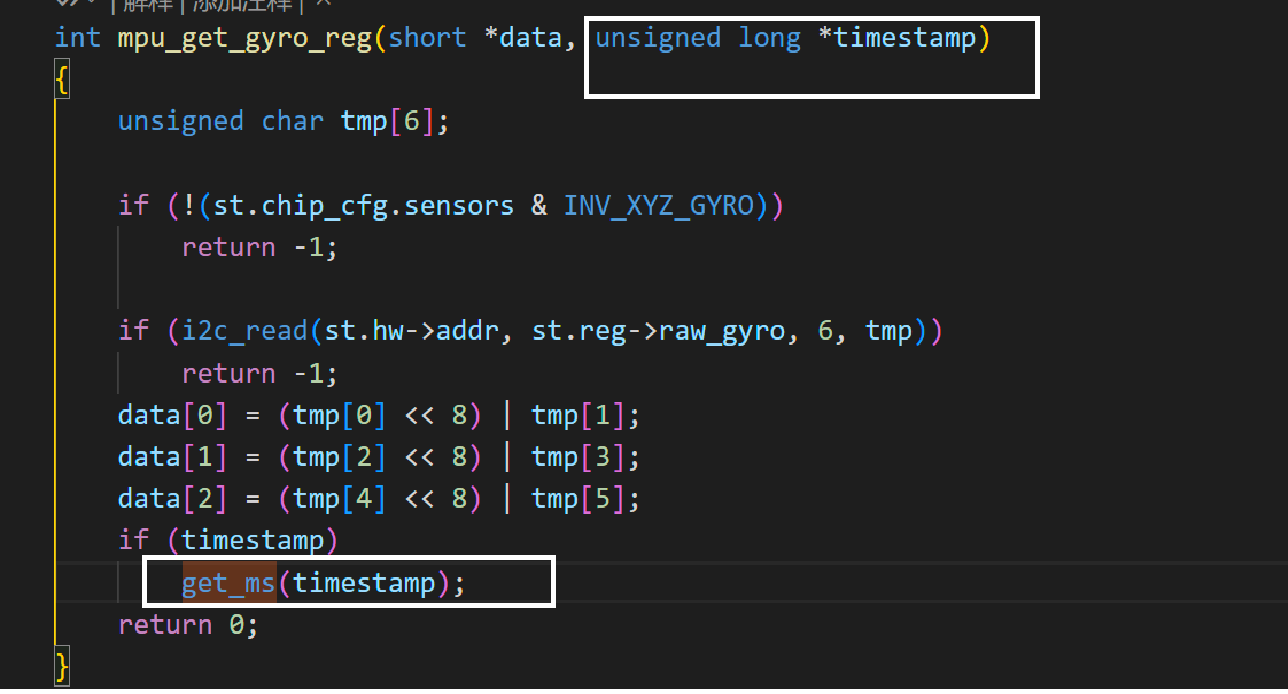
注意这些宏定义接口函数要符合文件的使用的参数顺序
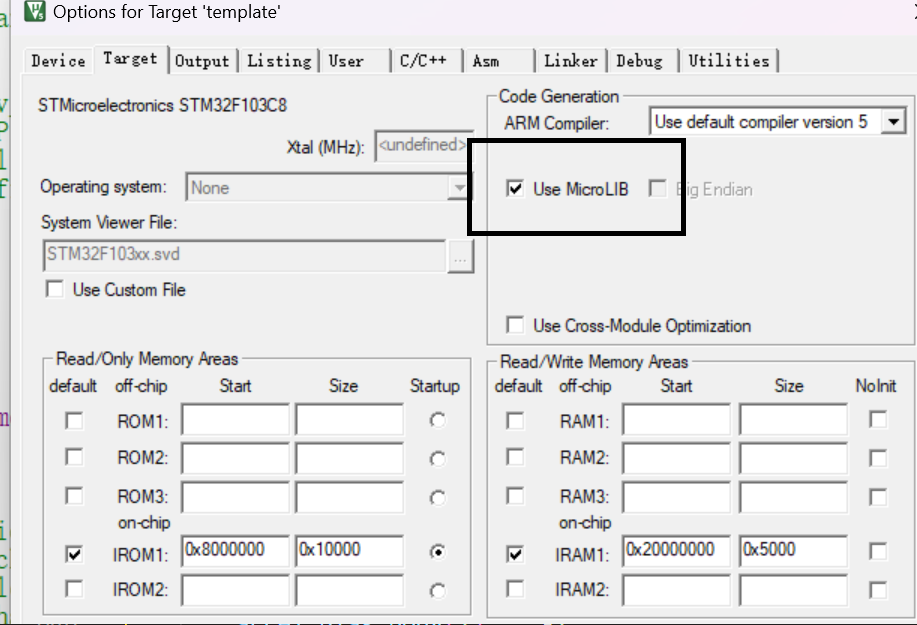
一看就是符合printf()的格式
如果重定义了printf()记得打开

无论读写顺序都是 设备地址 -->寄存器地址-->字长-->内容或者缓冲区
所以你定义的接口也要符合该规范
比如:



void my_get_ms(unsigned long *time) { *time = HAL_GetTick(); }记得在头文件中声明

inv_mpu_dmp_motion_driver.h
inv_mpu_dmp_motion_driver.c
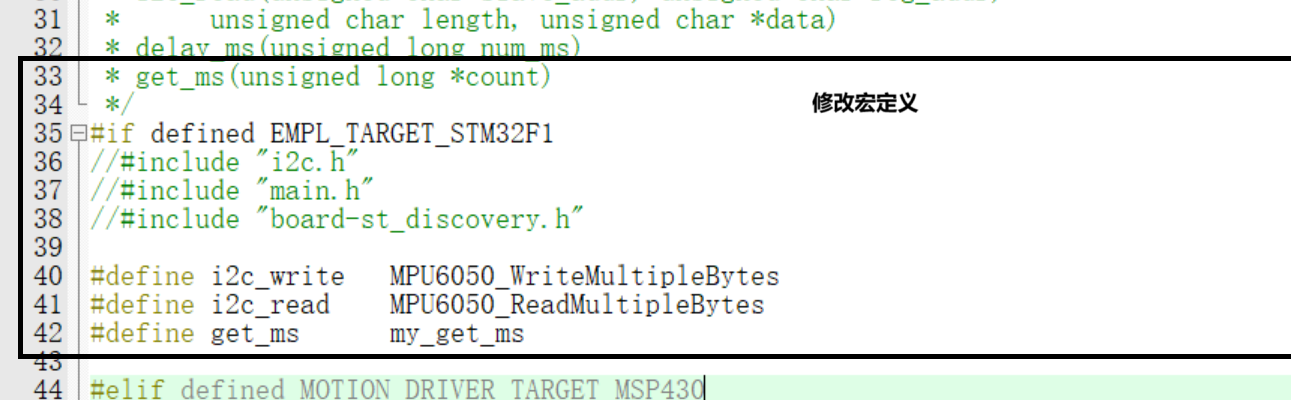
移植,其实主要是修改宏定义和添加自己型号得单片机和MPU型号的宏定义,然后剩下就跟着报错修改就行了;
DMP使用以及修改

由图可知DMP对获得到的陀螺仪和加速度计数据,经过处理后输出到FIFO,因此我们直接对FIFO进行读取即可
在 inv_mpu.c中添加以下代码
代码解析
1、浮点数的定义
// q30格式,long转float时的除数. #define q30 1073741824.0f解释如下
- 在MPU6050 DMP输出的四元数等数据时,使用的是q30格式,即实际值 = 原始整数值 / 2^30。
- 这样做的目的是用整数来表示高精度的小数,便于嵌入式系统高效处理,避免浮点运算。
- 2的30次方(1073741824)是因为用30位来表示小数部分,范围和精度都比较合适。
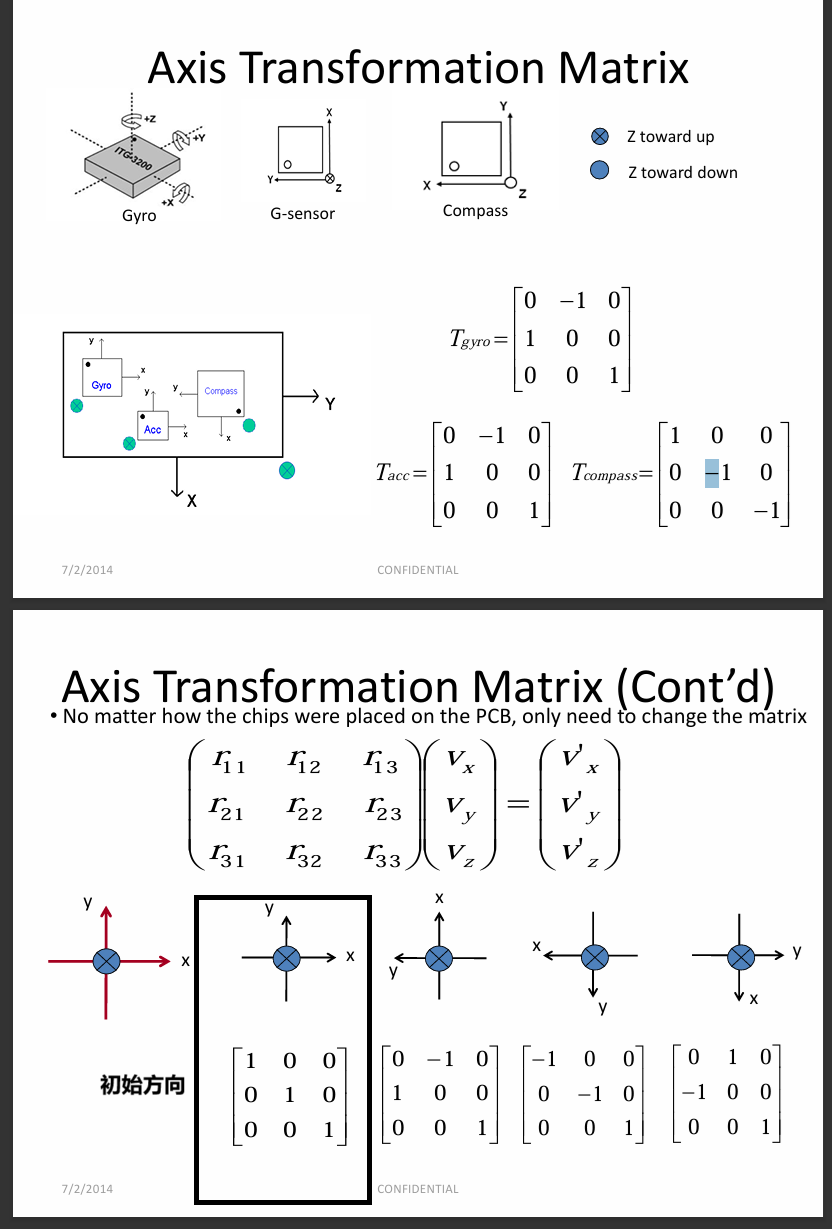
2、陀螺仪方向设置
// 陀螺仪方向设置 static signed char gyro_orientation[9] = {1, 0, 0, 0, 1, 0, 0, 0, 1};解释如下:
- 这是一个3×3的方向矩阵(行优先存储,共9个元素),用于描述陀螺仪(或加速度计)在物理安装方向与DMP(数字运动处理器)内部坐标系之间的映射关系。
- 当前这个矩阵是单位矩阵(对角线为1,其余为0),表示传感器的XYZ轴与DMP的XYZ轴一一对应,没有旋转或翻转。
- 如果你的传感器在实际安装时有旋转或翻转,需要修改这个矩阵,使其反映实际的物理方向。
用途:
- 该矩阵会被传递给 DMP,用于姿态解算时的方向校正。
- 常用于
dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation));这样的初始化函数中。知识参考:3维旋转矩阵推导与助记
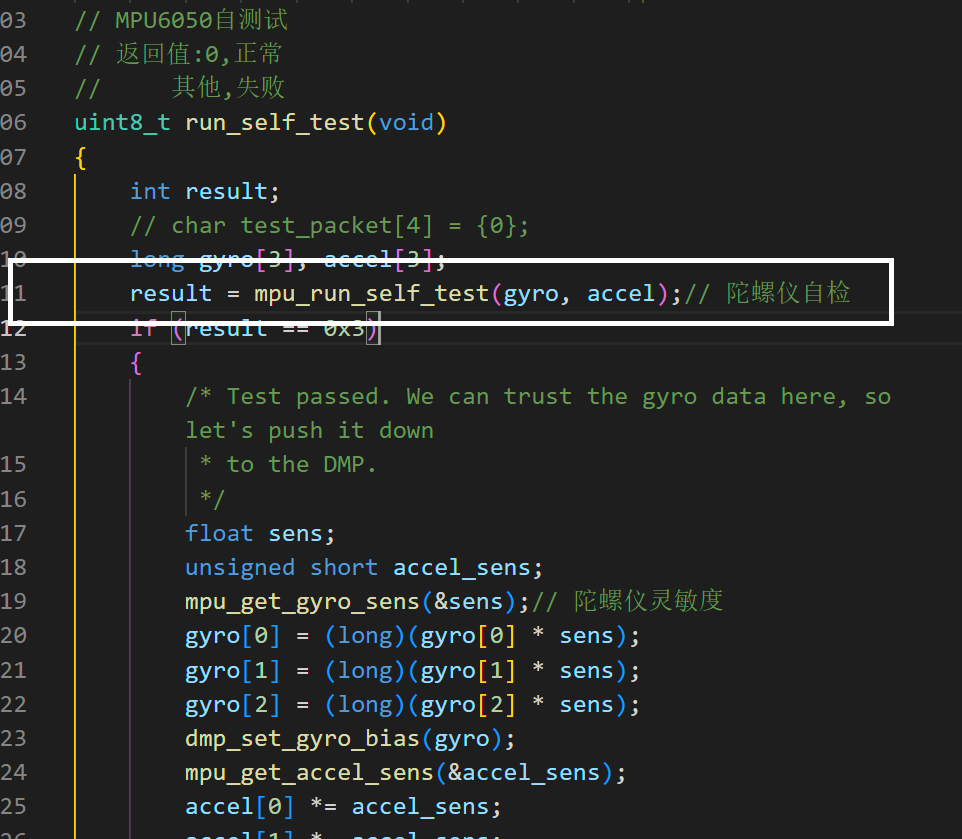
3、自检校准
// MPU6050自测试 // 返回值:0,正常 // 其他,失败 uint8_t run_self_test(void) { int result; // char test_packet[4] = {0}; long gyro[3], accel[3]; result = mpu_run_self_test(gyro, accel);// 陀螺仪自检 if (result == 0x3) { /* Test passed. We can trust the gyro data here, so let's push it down * to the DMP. */ float sens; unsigned short accel_sens; mpu_get_gyro_sens(&sens);// 陀螺仪灵敏度 gyro[0] = (long)(gyro[0] * sens); gyro[1] = (long)(gyro[1] * sens); gyro[2] = (long)(gyro[2] * sens); dmp_set_gyro_bias(gyro); mpu_get_accel_sens(&accel_sens); accel[0] *= accel_sens; accel[1] *= accel_sens; accel[2] *= accel_sens; dmp_set_accel_bias(accel); return 0; } else return 1; }
调用自检
mpu_run_self_test(gyro, accel);
调用底层自检函数,分别获取陀螺仪和加速度计的自检偏置值,返回值result表示自检结果。判断自检结果
if (result == 0x3)
只有当陀螺仪和加速度计都通过自检(0x3,二进制为11,分别对应陀螺仪和加速度计)时,才继续后续操作,否则返回1表示失败。设置陀螺仪偏置
- 获取陀螺仪灵敏度
mpu_get_gyro_sens(&sens);- 将自检得到的偏置值乘以灵敏度,转换为实际单位
- 调用
dmp_set_gyro_bias(gyro);设置到 DMP(数字运动处理器)设置加速度计偏置
- 获取加速度计灵敏度
mpu_get_accel_sens(&accel_sens);- 将自检得到的偏置值乘以灵敏度
- 调用
dmp_set_accel_bias(accel);设置到 DMP返回值
- 成功返回0
- 失败返回1
总结:
该函数用于在初始化或运行时对 MPU6050 进行自检,确保陀螺仪和加速度计工作正常,并将自检得到的偏置值写入 DMP,用于后续的姿态解算和数据校准。
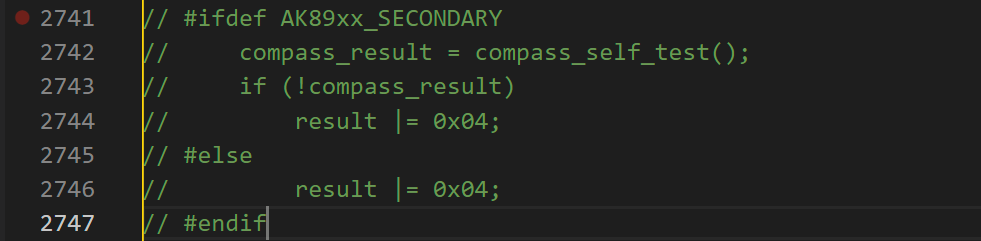
转到该mpu_run_self_test(gyro, accel)的定义中把下面的这个部分注释掉,不然无法通过后面的判断,无法校准,因为会导致result=0x07
4、方向矩阵转换成方向标量
unsigned short inv_orientation_matrix_to_scalar(const signed char *mtx) { unsigned short scalar; /* XYZ 010_001_000 Identity Matrix XZY 001_010_000 YXZ 010_000_001 YZX 000_010_001 ZXY 001_000_010 ZYX 000_001_010 */ scalar = inv_row_2_scale(mtx); scalar |= inv_row_2_scale(mtx + 3) << 3; scalar |= inv_row_2_scale(mtx + 6) << 6; return scalar; }
- 功能:将3x3方向矩阵(9个元素,按行存储)转换为一个16位的方向标量。
- 实现:
inv_row_2_scale(mtx)处理第一行(X轴),结果放低3位。inv_row_2_scale(mtx + 3)处理第二行(Y轴),结果左移3位。inv_row_2_scale(mtx + 6)处理第三行(Z轴),结果左移6位。- 最终将三个结果按位或,得到一个唯一的方向标量。
- 用途:这个标量会传递给DMP,用于告诉DMP当前传感器的物理安装方向
unsigned short inv_row_2_scale(const signed char *row) { unsigned short b; if (row[0] > 0) b = 0; else if (row[0] < 0) b = 4; else if (row[1] > 0) b = 1; else if (row[1] < 0) b = 5; else if (row[2] > 0) b = 2; else if (row[2] < 0) b = 6; else b = 7; // error return b; }
- 功能:将矩阵的一行(3个元素)转换为一个方向编码。
- 实现:
- 判断该行哪个元素为正/负,分别对应不同的编码(0~6),7为错误。
- 例如,
[1,0,0]→ 0,[0,-1,0]→ 5,[0,0,1]→ 2。- 用途:用于描述每一轴的正负方向。
总结
- 这两个函数配合使用,将3x3方向矩阵(如
gyro_orientation)转换为DMP初始化时需要的方向标量。- 这样DMP就能正确理解传感器的物理安装方向,实现姿态解算的正确性。
5、dmp初始化
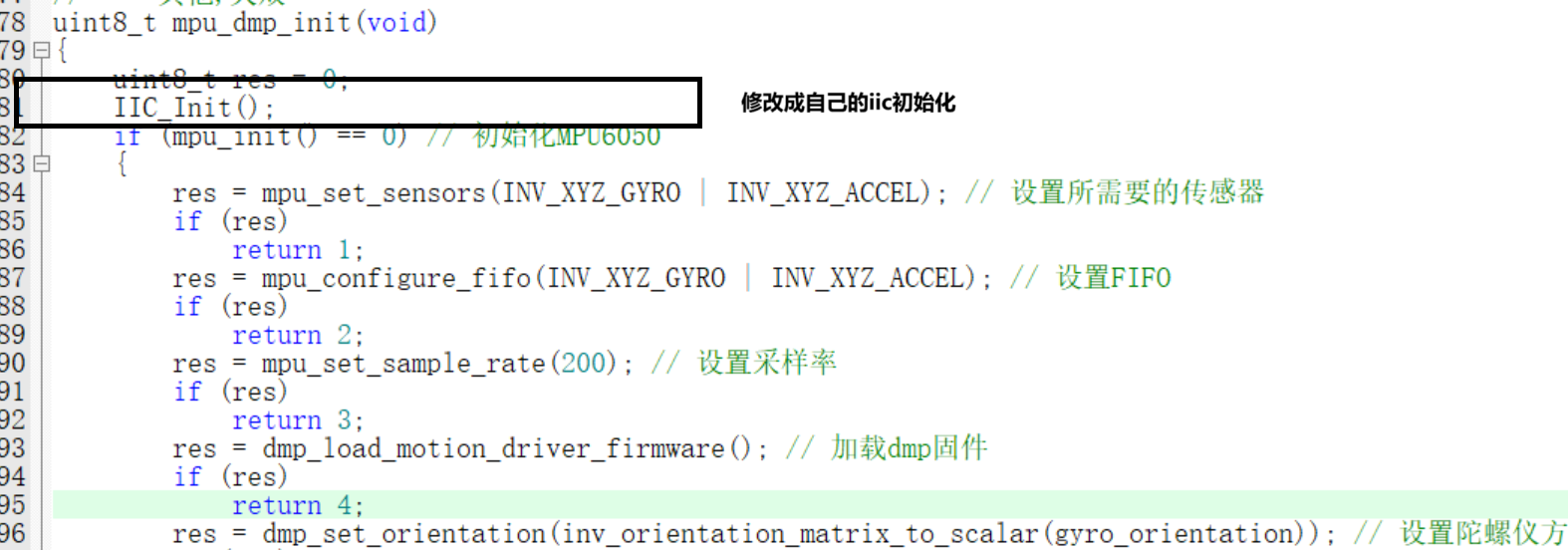
// mpu6050,dmp初始化 // 返回值:0,正常 // 其他,失败 uint8_t mpu_dmp_init(void) { uint8_t res = 0; IIC_Init(); if (mpu_init() == 0) // 初始化MPU6050 { res = mpu_set_sensors(INV_XYZ_GYRO | INV_XYZ_ACCEL); // 设置所需要的传感器 if (res) return 1; res = mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL); // 设置FIFO if (res) return 2; res = mpu_set_sample_rate(200); // 设置采样率 if (res) return 3; res = dmp_load_motion_driver_firmware(); // 加载dmp固件 if (res) return 4; res = dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation)); // 设置陀螺仪方向 if (res) return 5; res = dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT | DMP_FEATURE_TAP | DMP_FEATURE_ANDROID_ORIENT | DMP_FEATURE_SEND_RAW_ACCEL | DMP_FEATURE_SEND_CAL_GYRO | DMP_FEATURE_GYRO_CAL);// 使能DMP功能 if (res) return 6; res = dmp_set_fifo_rate(200); // 设置DMP输出速率(最大不超过200Hz) if (res) return 7; res = run_self_test(); // 自检 if (res) return 8; res = mpu_set_dmp_state(1); // 使能DMP if (res) return 9; } else return 10; return 0; }修改部分
inv_mpu.c
inv_mpu.h
注意:FIFO的输出速率必须和传感器的采样率一致
DMP_FEATURE_6X_LP_QUAT
使能6轴低功耗四元数输出(只用陀螺仪和加速度计,适合姿态解算)。DMP_FEATURE_TAP
使能敲击(Tap)检测功能。DMP_FEATURE_ANDROID_ORIENT
使能Android方向检测(如屏幕方向自动旋转)。DMP_FEATURE_SEND_RAW_ACCEL
使能原始加速度计数据输出。DMP_FEATURE_SEND_CAL_GYRO
使能校准后的陀螺仪数据输出。DMP_FEATURE_GYRO_CAL
使能陀螺仪自动校准功能。


6、四元数转换成欧拉角
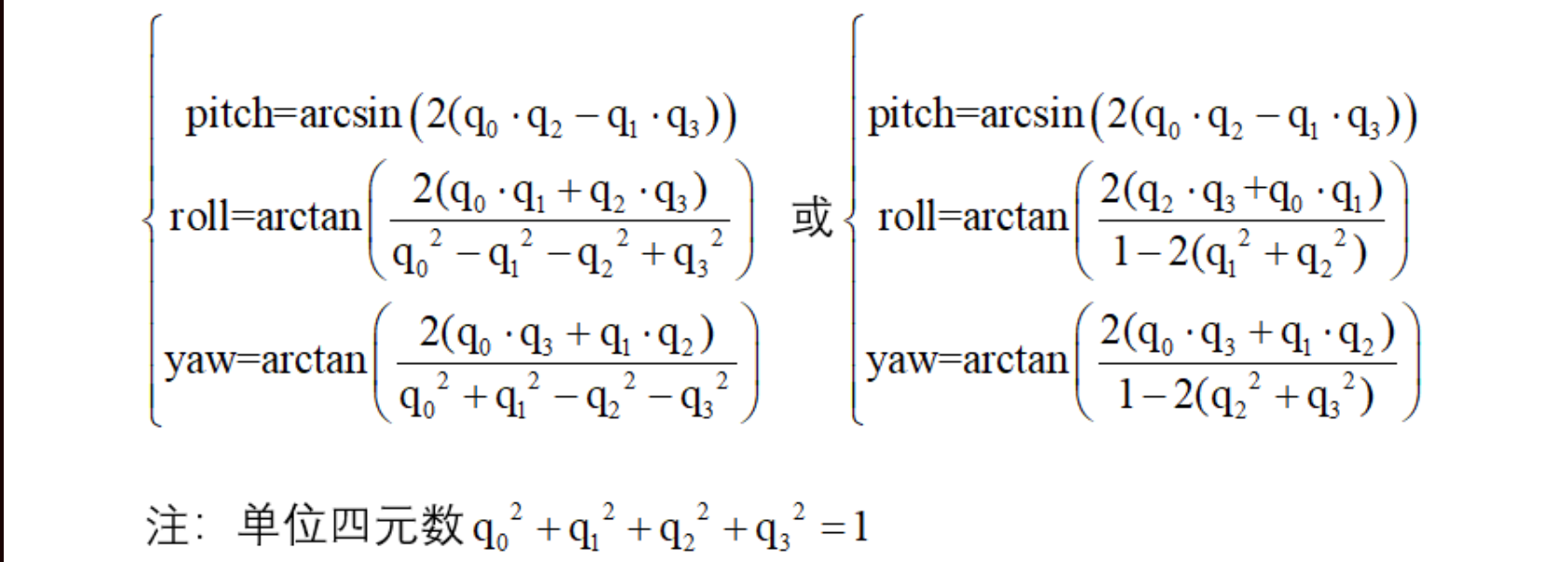
// 得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多) // pitch:俯仰角 精度:0.1° 范围:-90.0° <---> +90.0° // roll:横滚角 精度:0.1° 范围:-180.0°<---> +180.0° // yaw:航向角 精度:0.1° 范围:-180.0°<---> +180.0° // 返回值:0,正常 // 其他,失败 uint8_t mpu_dmp_get_data(float *pitch, float *roll, float *yaw) { float q0 = 1.0f, q1 = 0.0f, q2 = 0.0f, q3 = 0.0f; unsigned long sensor_timestamp; short gyro[3], accel[3], sensors; unsigned char more; long quat[4]; if (dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors, &more)) return 1; /* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units. * This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent. **/ /*if (sensors & INV_XYZ_GYRO ) send_packet(PACKET_TYPE_GYRO, gyro); if (sensors & INV_XYZ_ACCEL) send_packet(PACKET_TYPE_ACCEL, accel); */ /* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30. * The orientation is set by the scalar passed to dmp_set_orientation during initialization. **/ if (sensors & INV_WXYZ_QUAT) { q0 = quat[0] / q30; // q30格式转换为浮点数 q1 = quat[1] / q30; q2 = quat[2] / q30; q3 = quat[3] / q30; // 计算得到俯仰角/横滚角/航向角 *pitch = asin(-2 * q1 * q3 + 2 * q0 * q2) * 57.3; // pitch *roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2 * q2 + 1) * 57.3; // roll *yaw = atan2(2 * (q1 * q2 + q0 * q3), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3) * 57.3; // yaw } else return 2; return 0; }DMP直接输出的是四元数,所以我们要获取欧拉角要对四元数进行处理,以下是四元数转换成欧拉角的公式
自行添加的完整代码
inv_mpu.h
void my_get_ms(unsigned long *time);
unsigned short inv_row_2_scale(const signed char *row);
unsigned short inv_orientation_matrix_to_scalar(const signed char *mtx);
uint8_t run_self_test(void);
uint8_t mpu_dmp_init(void);
uint8_t mpu_dmp_get_data(float *pitch, float *roll, float *yaw);inv_mpu.c
// q30格式,long转float时的除数.
#define q30 1073741824.0f
// 陀螺仪方向设置
static signed char gyro_orientation[9] = {1, 0, 0,
0, 1, 0,
0, 0, 1};
// MPU6050自测试
// 返回值:0,正常
// 其他,失败
uint8_t run_self_test(void)
{
int result;
// char test_packet[4] = {0};
long gyro[3], accel[3];
result = mpu_run_self_test(gyro, accel);// 陀螺仪自检
if (result == 0x3)
{
/* Test passed. We can trust the gyro data here, so let's push it down
* to the DMP.
*/
float sens;
unsigned short accel_sens;
mpu_get_gyro_sens(&sens);// 陀螺仪灵敏度
gyro[0] = (long)(gyro[0] * sens);
gyro[1] = (long)(gyro[1] * sens);
gyro[2] = (long)(gyro[2] * sens);
dmp_set_gyro_bias(gyro);
mpu_get_accel_sens(&accel_sens);
accel[0] *= accel_sens;
accel[1] *= accel_sens;
accel[2] *= accel_sens;
dmp_set_accel_bias(accel);
return 0;
}
else
return 1;
}
// 陀螺仪方向控制
unsigned short inv_orientation_matrix_to_scalar(
const signed char *mtx)
{
unsigned short scalar;
/*
XYZ 010_001_000 Identity Matrix
XZY 001_010_000
YXZ 010_000_001
YZX 000_010_001
ZXY 001_000_010
ZYX 000_001_010
*/
scalar = inv_row_2_scale(mtx);
scalar |= inv_row_2_scale(mtx + 3) << 3;
scalar |= inv_row_2_scale(mtx + 6) << 6;
return scalar;
}
// 方向转换
unsigned short inv_row_2_scale(const signed char *row)
{
unsigned short b;
if (row[0] > 0)
b = 0;
else if (row[0] < 0)
b = 4;
else if (row[1] > 0)
b = 1;
else if (row[1] < 0)
b = 5;
else if (row[2] > 0)
b = 2;
else if (row[2] < 0)
b = 6;
else
b = 7; // error
return b;
}
// mpu6050,dmp初始化
// 返回值:0,正常
// 其他,失败
uint8_t mpu_dmp_init(void)
{
uint8_t res = 0;
IIC_Init();
if (mpu_init() == 0) // 初始化MPU6050
{
res = mpu_set_sensors(INV_XYZ_GYRO | INV_XYZ_ACCEL); // 设置所需要的传感器
if (res)
return 1;
res = mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL); // 设置FIFO
if (res)
return 2;
res = mpu_set_sample_rate(200); // 设置采样率
if (res)
return 3;
res = dmp_load_motion_driver_firmware(); // 加载dmp固件
if (res)
return 4;
res = dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation)); // 设置陀螺仪方向
if (res)
return 5;
res = dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT |
DMP_FEATURE_TAP |
DMP_FEATURE_ANDROID_ORIENT |
DMP_FEATURE_SEND_RAW_ACCEL |
DMP_FEATURE_SEND_CAL_GYRO |
DMP_FEATURE_GYRO_CAL);// 使能DMP功能
if (res)
return 6;
res = dmp_set_fifo_rate(200); // 设置DMP输出速率(最大不超过200Hz)
if (res)
return 7;
res = run_self_test(); // 自检
if (res)
return 8;
res = mpu_set_dmp_state(1); // 使能DMP
if (res)
return 9;
}
else
return 10;
return 0;
}
// 得到dmp处理后的数据(注意,本函数需要比较多堆栈,局部变量有点多)
// pitch:俯仰角 精度:0.1° 范围:-90.0° <---> +90.0°
// roll:横滚角 精度:0.1° 范围:-180.0°<---> +180.0°
// yaw:航向角 精度:0.1° 范围:-180.0°<---> +180.0°
// 返回值:0,正常
// 其他,失败
uint8_t mpu_dmp_get_data(float *pitch, float *roll, float *yaw)
{
float q0 = 1.0f, q1 = 0.0f, q2 = 0.0f, q3 = 0.0f;
unsigned long sensor_timestamp;
short gyro[3], accel[3], sensors;
unsigned char more;
long quat[4];
if (dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors, &more))
return 1;
/* Gyro and accel data are written to the FIFO by the DMP in chip frame and hardware units.
* This behavior is convenient because it keeps the gyro and accel outputs of dmp_read_fifo and mpu_read_fifo consistent.
**/
/*if (sensors & INV_XYZ_GYRO )
send_packet(PACKET_TYPE_GYRO, gyro);
if (sensors & INV_XYZ_ACCEL)
send_packet(PACKET_TYPE_ACCEL, accel); */
/* Unlike gyro and accel, quaternions are written to the FIFO in the body frame, q30.
* The orientation is set by the scalar passed to dmp_set_orientation during initialization.
**/
if (sensors & INV_WXYZ_QUAT)
{
q0 = quat[0] / q30; // q30格式转换为浮点数
q1 = quat[1] / q30;
q2 = quat[2] / q30;
q3 = quat[3] / q30;
// 计算得到俯仰角/横滚角/航向角
*pitch = asin(-2 * q1 * q3 + 2 * q0 * q2) * 57.3; // pitch
*roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2 * q2 + 1) * 57.3; // roll
*yaw = atan2(2 * (q1 * q2 + q0 * q3), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3) * 57.3; // yaw
}
else
return 2;
return 0;
}
void my_get_ms(unsigned long *time)
{
*time = HAL_GetTick();
}

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐



 27
27 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)