
DPJ-151 基于Arduino的平衡小车设计(源代码+proteus仿真)
本文介绍了一种基于Arduino的两轮自平衡小车设计方案。系统采用MPU6050六轴传感器检测姿态,TB6612FNG模块驱动电机,通过PID算法实现自主平衡。小车能承受500g负载,在外力干扰下可快速恢复平衡。设计包含主控电路、驱动电路、姿态检测电路和通信电路,支持蓝牙手机控制。当倾斜角度超过30度或受力大于5N时,小车会失去平衡。文章还提供了原理图、设计说明等技术资料,并承诺为毕业生提供单片机
片机型号(Arduino)
目录
一、摘要
二、设计要求
三、原理图
四、说明书预览
五、QA
作者简介:电类领域优质创作者、多年架构师设计经验、多年校企合作经验,被多个学校常年聘为校外企业导师,指导学生毕业设计并参与学生毕业答辩指导,有较为丰富的相关经验。期待与各位高校教师、企业讲师以及同行交流合作
主要内容:人工智能与大数据、单片机/PLC开发、Matlab物联网设计与开发设计、学习资料、面试题库、技术互助、就业指导等
业务范围:指导功能设计、开题报告、任务书、文献综述、系统功能实现、代码编写、论文编写和辅导、论文降重、长期答辩答疑辅导、腾讯会议一对一专业讲解辅导答辩、模拟答辩演练、和理解代码逻辑思路等。
收藏点赞关注作者
一、摘要
在科技发展愈来愈迅速的今天,自平衡小车渐渐进入大家的视野。自平衡小车可与摄像头、音箱、广告牌等进行结合形成可移动平台,也可以实现智能家居机器人帮助主人运送物品的功能,因此自平衡小车具有广泛的研究价值和应用前景。
本设计提出了自制的两轮自平衡小车作为设计方案。自平衡小车硬件电路的设计包括主控电路、驱动电路、平衡姿态电路、通信电路。当自平衡小车受到外力影响时,能够回到其初始状态并保证其平衡姿态。当使用一定外力推自平衡小车时,平衡姿态电路将小车不平衡的信号传递给控制电路,控制电路再将反馈信号传递给电机驱动电路,从而使车轮朝小车倾斜方向快速转动,以达到小车平衡的状态。其次,该平衡小车采用六轴MPU6050传感器作为测量小车的加速度和角速度,平衡车方向旋转和前后倾斜的姿势检测模块。采用TB6612FNG模块作为小车上的电机驱动模块,当自平衡小车向前倾倒时,驱动电机使轮子向前运动从而使小车达到平衡。
整个系统完成后,各个模块能够正常和谐地完成工作。没有人为干扰时,小车可以自主平衡并且承载500 g的重量不会受到影响。当受到外力干扰时,小车可以通过独立调节平衡来快速恢复其稳定状态,从而实现自主平衡。
关键词:两轮平衡车;Arduino;平衡姿态;MPU6050
二、设计要求
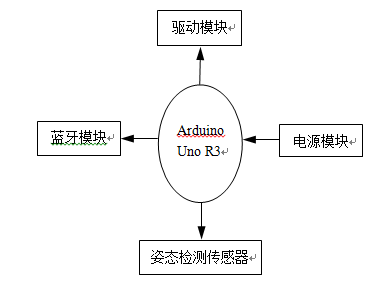
控制器相当于大脑,姿态检测传感器相当于人体的感知器官,当姿态检测传感器将平衡小车的三轴加速度和三轴角速度测量出之后,将其测量的模拟量转化为可输出数字量,进而将数据传送到控制器上。控制器接收到信息后,判断车体状态。当车体处于不平衡状态时,电机模块驱动电机使小车车轮向倾倒的方向转动,从而使小车达到自平衡状态。蓝牙模块则使小车可受手机App的控制,实现车体左右转动以及前后行走的功能。电池模块则是在系统外部接入12V的电压,并将其转化为各个模块所需要的电压。注意,当平衡小车运行时,不可直接拿起,会使平衡小车在失重的情况下,电机高速运转,在发生这一情况时需要及时关闭电源。当小车运行时,小车左右轻微摇摆,基本与水平面保持90度角,当小车与水平面倾斜角度小于30度时,则小车超出可控范围,车体跌倒。使用外力作用推平衡小车时,当力度大于5N则小车跌倒。系统设计框图如图2.1所示。
三、原理图
四、说明书预览(18111字)
五、如果学弟学妹们在毕设方面有任何问题,随时可以私信我咨询哦,有问必答!学长专注于单片机相关的知识,可以解决单片机设计、嵌入式系统、编程和硬件等方面的难题。愿毕业生有力,陪迷茫着前行!
通过网盘分享的文件:资料.rar
链接: https://pan.baidu.com/s/1oAaq4r_ZbdVjRvQsAA8r5g 提取码: BYSJ

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)