
平台使用小米1代扫地机器人简介及关键功能详解
对于需要学习项目与代码规范的工程师来说,小米1代扫地机器人无疑是一个理想的学习平台。小米1代扫地机器人集成了多种驱动协议,包括IIC、PWM、SPI、多路ADC与DMA等,确保了机器人能够与各个模块进行高效通信。软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。软件驱动包括 IIC、PWM、SPI、多路AD
平台采用小米1代扫地机。 目前只有32端代码能实现延边避障防跌 落充电等功能。 适合需要学习项目与代码规范的工程师 硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。 软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。 代码注释清晰、代码规范好、每个函数必有输入输出范围参数解释。
在现代社会,科技的飞速发展让清洁变得更加轻松。特别是智能扫地机器人的普及,为用户提供了全新的清洁体验。今天我们将深入讨论其中一款——小米1代扫地机,及其核心的技术和代码规范。
一、关于小米1代扫地机器人
------
小米1代扫地机器人,凭借其高效率与智能化程度,获得了广泛好评。作为一款实用与便捷并存的产品,该机器人所拥有的硬件配置与软件系统共同构建了其独特的智能特性。
二、硬件驱动介绍
--------
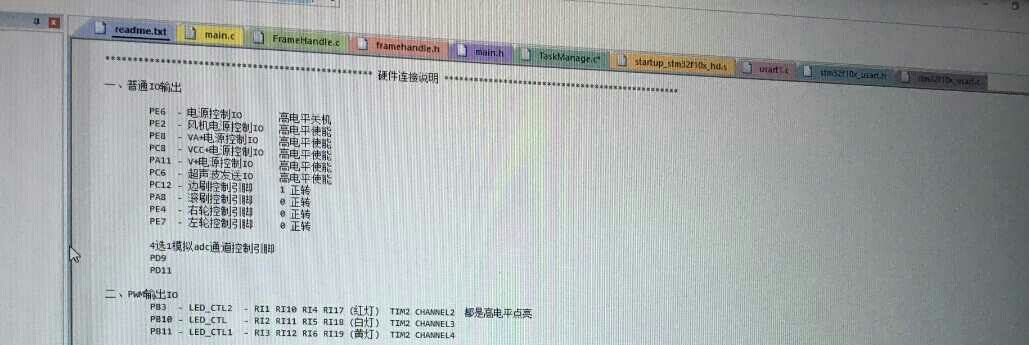
- 陀螺仪姿态传感器BMI160:作为机器人姿态检测的重要部件,BMI160能够精确捕捉扫地机器人的姿态变化,为延边避障等高级功能提供数据支持。
- 电源管理BQ24733:负责机器人的电力分配与控制,确保扫地机器人在工作过程中电力供应稳定。
三、软件驱动概览
平台采用小米1代扫地机。 目前只有32端代码能实现延边避障防跌 落充电等功能。 适合需要学习项目与代码规范的工程师 硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。 软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。 代码注释清晰、代码规范好、每个函数必有输入输出范围参数解释。
--------
软件系统是扫地机器人能够执行复杂任务的关键。小米1代扫地机器人集成了多种驱动协议,包括IIC、PWM、SPI、多路ADC与DMA等,确保了机器人能够与各个模块进行高效通信。
四、功能实现与代码规范
---------
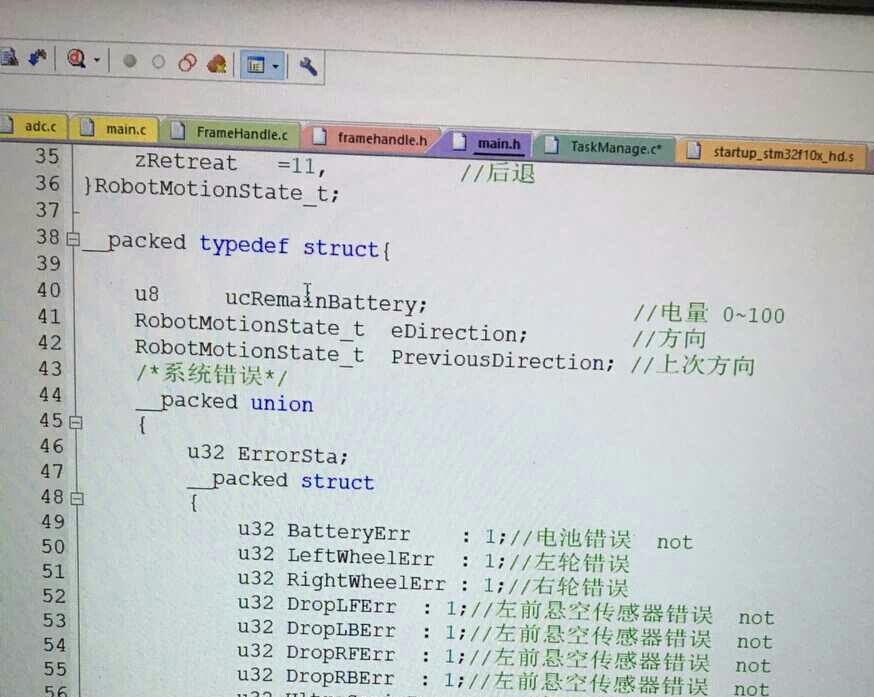
- 延边避障防跌落充电功能:目前,仅有32端代码能够实现这一功能。通过精确的传感器数据读取与处理,机器人能够在清洁过程中避开障碍物,并防止跌落,实现自动充电。代码注释清晰,每个函数都有明确的输入输出范围参数解释,便于工程师学习和理解项目规范。
- 通信协议与IAP升级:机器人支持多种通信协议,包括freertos操作系统等,使得机器人的功能升级与维护变得简单快捷。同时,IAP升级功能使得固件更新变得轻而易举,提高了产品的长期使用价值。
- PID控制与编码器输入捕获:PID(比例-积分-微分)控制广泛应用于机器人的运动控制中。通过编码器输入捕获技术,机器人的运动轨迹能够被精确控制,实现高效清洁。
五、总结
----
小米1代扫地机器人以其出色的硬件配置与软件系统,为用户带来了全新的清洁体验。其清晰的代码注释与良好的代码规范,使得工程师在学习与维护项目时能够事半功倍。无论是延边避障防跌落充电,还是通信协议与IAP升级,都体现了该产品的高效与智能。对于需要学习项目与代码规范的工程师来说,小米1代扫地机器人无疑是一个理想的学习平台。

openvela 操作系统专为 AIoT 领域量身定制,以轻量化、标准兼容、安全性和高度可扩展性为核心特点。openvela 以其卓越的技术优势,已成为众多物联网设备和 AI 硬件的技术首选,涵盖了智能手表、运动手环、智能音箱、耳机、智能家居设备以及机器人等多个领域。
更多推荐


 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)